手眼标定 - 最终精度和误差优化心得
手眼标定 - 标定误差优化项
- 一、TCP标定误差优化
- 1、注意标定针摆放范围
- 2、TCP标定时的点次态与工作姿态尽可能保持相近
- 二、深度相机对齐矩阵误差
- 1、手动计算对齐矩阵
- 三、手眼标定拍照姿态
- 1、TCP标定姿态优先
- 2、水平放置棋盘格优先
为减少最终手眼标定的误差,可做或注意以下步骤(环节)。
一、TCP标定误差优化
1、注意标定针摆放范围
如:在实际焊接、码垛等工作时,机械臂的工作范围或摆动范围主要集中在X轴的[150mm , 1500mm]范围,Y轴的[-150mm , 350mm]范围,Z轴的[-200mm , 600mm]范围,那么在做TCP时,应将标定针(或标定点)摆放在X =(150 + 1500)/ 2 = 825mm 左右的位置,而不宜摆放在过于靠近最小值和最大值的附近。(Y轴和Z轴计算方式同理)
2、TCP标定时的点次态与工作姿态尽可能保持相近
如:实际焊接时枪头与XY平面的夹角在[30-50]°之间,焊接的方向一般指向+X+Y、+X-Y、-X+Y、-X-Y,那么做TCP时的点位也应该与焊接时的姿态、夹角保持一致或相近。
二、深度相机对齐矩阵误差
1、手动计算对齐矩阵
市面上常见的深度相机一般有彩色点云和非彩色点云(深度点云),彩色点云和深度点云之间一般有对齐矩阵,该矩阵可通过上位机获取,但一般都不够精准。尽量自己计算。
方法: 同一位置下,分别进行彩色点云和深度点云拍照,然后将两点云进行配准(配准算法可使用Open3D或PCL可提供的接口),最终的配准矩阵,即我们需要的对齐矩阵。然后重复拍照N次(每组照片尽量拍摄不同物体),计算对齐矩阵的平均值(N越大,对齐矩阵精度越高)。
三、手眼标定拍照姿态
1、TCP标定姿态优先
手眼标定时,处于拍照姿态时此时的工具的姿态(本文指的是:工具向量与机器人坐标系下的XY平面的夹角)尽可能与做TCP标定时(工具向量与机器人坐标系下的XY平面的夹角)的姿态保持一致(或相近),如果在该姿态下相机无法拍到棋盘格,则可将棋盘格倾斜放置。倾斜角度慢慢调整,直到工具姿态接近TCP姿态且相机可以拍到棋盘格为最佳。
局限性: 如果相机精度不是很高,得通过增加拍照次数的方式减少手眼误差,则该方案可能有局限性,因为棋盘格斜立摆放拍照姿态会受到限制,一般只能让相机朝XY平面方向上的一个固定范围方向,不能绕Z轴拍照360°,所以最终的手眼矩阵不具有可靠的全方位都可用的最佳效果!
2、水平放置棋盘格优先
水平放置棋盘格方法,该方法可显著增加拍照次数:拍照姿态一般让相机Z轴与棋盘格平面法向量夹角处于0°-25°范围(夹角过大亦会影响手眼矩阵精度),让相机调整至可拍到整个棋盘格的位置,然后绕Z轴360°都拍下,精度差的相机拍照次数最好在大几十次甚至100次以上,而精度高的工业相机配合精度高的机器人手眼拍照次数可控制在10次以下。
相关文章:
手眼标定 - 最终精度和误差优化心得
手眼标定 - 标定误差优化项 一、TCP标定误差优化1、注意标定针摆放范围2、TCP标定时的点次态与工作姿态尽可能保持相近 二、深度相机对齐矩阵误差1、手动计算对齐矩阵 三、手眼标定拍照姿态1、TCP标定姿态优先2、水平放置棋盘格优先 为减少最终手眼标定的误差,可做或…...

pytorch一致数据增强
分割任务对 image 做(某些)transform 时,要对 label(segmentation mask)也做对应的 transform,如 Resize、RandomRotation 等。如果对 image、label 分别用 transform 处理一遍,则涉及随机操作的…...

MapReduce
1. MapReduce是什么?请简要说明它的工作原理。 MapReduce是一种编程模型,主要用于处理大规模数据集的并行运算,特别是非结构化数据。这个模型的核心思想是将大数据处理任务分解为两个主要步骤:Map和Reduce。用户只需实现map()和r…...

Spring Boot 快速入门
Spring Boot 快速入门 什么是Spring Boot Spring Boot是一个用于简化Spring应用开发的框架,它基于Spring框架,提供了自动配置、快速开发等特性,使得开发者可以更加便捷地构建独立的、生产级别的Spring应用。 开始使用Spring Boot 步骤一&a…...

什么是神经网络的非线性
大家好啊,我是董董灿。 最近在写《计算机视觉入门与调优》(右键,在新窗口中打开链接)的小册,其中一部分说到激活函数的时候,谈到了神经网络的非线性问题。 今天就一起来看看,为什么神经网络需…...
——浅谈用户体验测试的主要功能)
前端知识(十四)——浅谈用户体验测试的主要功能
用户体验(User Experience,简称UX)在现代软件和产品开发中变得愈发重要。为了确保产品能够满足用户期望,提高用户满意度,用户体验测试成为不可或缺的环节。本文将详细探讨用户体验测试的主要功能,以及它在产品开发过程中的重要性 …...

解决前端跨域问题,后端解决方法
Spring CloudVue前后端分离项目报错:Network Error;net::ERR_FAILED(请求跨越)-CSDN博客记录自用...

【网络奇缘系列】计算机网络|数据通信方式|数据传输方式
🌈个人主页: Aileen_0v0🔥系列专栏: 一见倾心,再见倾城 --- 计算机网络~💫个人格言:"没有罗马,那就自己创造罗马~" 这篇文章是关于计算机网络中数据通信的基础知识点, 从模型,术语再到数据通信方式&#…...

数组 注意事项
1.一维数组的初始化 int a[5]{1,2,3,4,5}; 合法 int a[5]{1,2,3}; 合法 int a[]{1,2,3,4,5}; 合法,后面决定前面的大小 int a[5]{1,2,3,4,5,6}; 不合法! 2.一维数组的定义 int a[5] 合法 int a[11] 合法 int a[1/24] 合法 int x5,a[x…...

day11 滑动窗口中的最大值
class MyQueue { //单调队列(从大到小)public:deque<int> que; // 使用deque来实现单调队列// 每次弹出的时候,比较当前要弹出的数值是否等于队列出口元素的数值,如果相等则弹出。// 同时pop之前判断队列当前是否为空。void…...
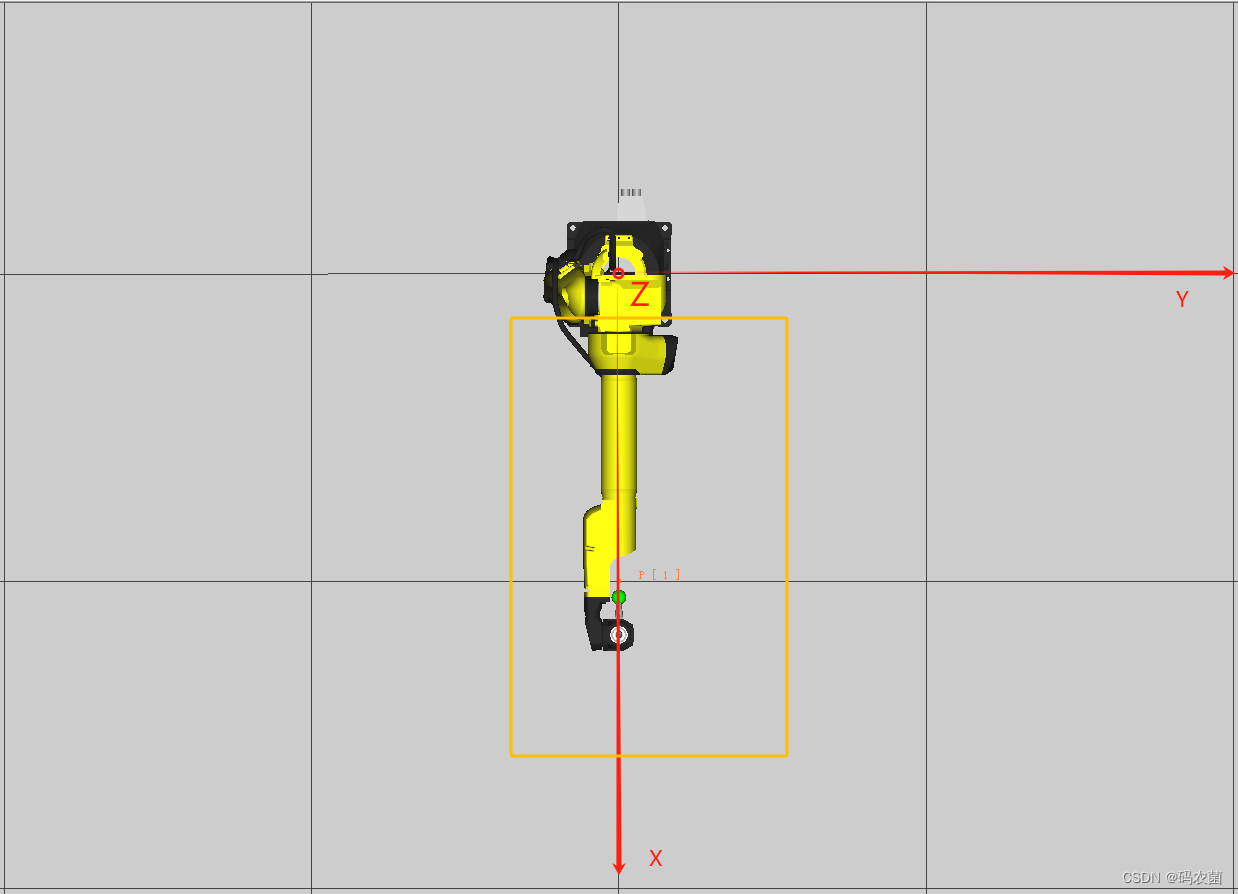
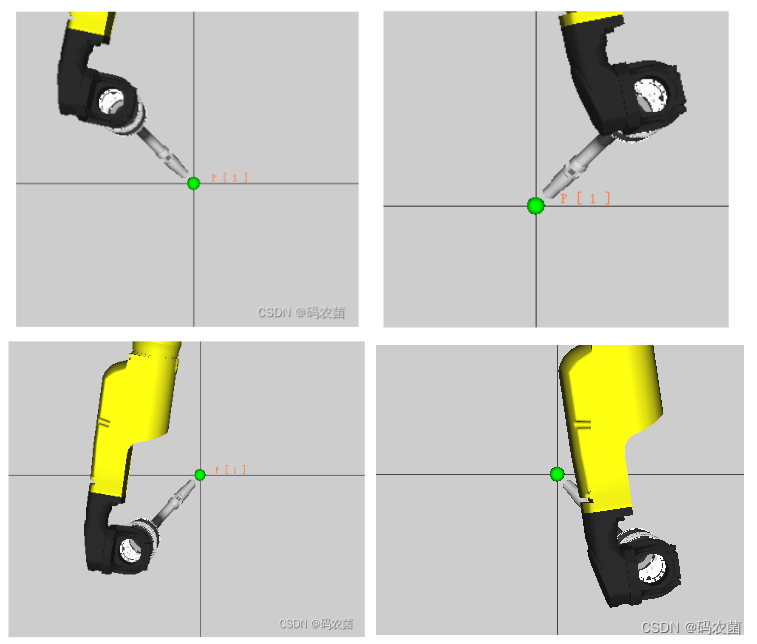
viple模拟器使用(五):Web 2D模拟器中实现两距离局部最优迷宫算法
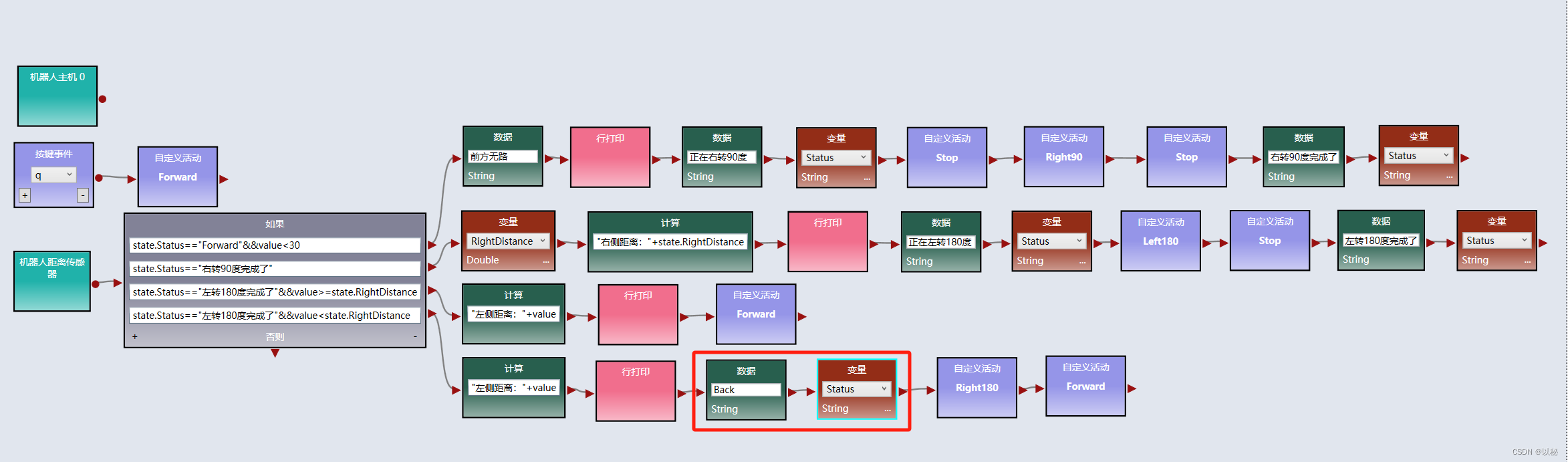
关于两距离局部最优迷宫算法的原理本文不再赘述,详情请参考:viple模拟器使用(四),归纳总结为: 前方有路,则直行; 前方无路,则右转90度,标记右转完成ÿ…...
)
每日一道算法题 3(2023-12-11)
题目描述: VLAN是一种对局域网设备进行逻辑划分的技术,为了标识不同的VLAN,引入VLAN ID(1-4094之间的整数)的概念。 定义一个VLAN ID的资源池(下称VLAN资源池),资源池中连续的VLAN用开始VLAN-结束VLAN表示,不连续的用单…...
【Android】查看keystore的公钥和私钥
前言: 查看前准备好.keystore文件,安装并配置openssl、keytool。文件路径中不要有中文。 一、查看keystore的公钥: 1.从keystore中获取MD5证书 keytool -list -v -keystore gamekeyold.keystore 2.导出公钥文件 keytool -export -alias …...

ChatGPT的常识
什么是ChatGPT? ChatGPT是一个基于GPT模型的聊天机器人,GPT即“Generative Pre-training Transformer”,是一种预训练的语言模型。ChatGPT使用GPT-2和GPT-3两种模型来生成自然语言响应,从而与人类进行真实的对话。 ChatGPT的设计…...

Spring Boot中的事务是如何实现的?懂吗?
SpringBoot中的事务管理,用得好,能确保数据的一致性和完整性;用得不好,可能会给性能带来不小的影响哦。 基本使用 在SpringBoot中,事务的使用非常简洁。首先,得感谢Spring框架提供的Transactional注解&am…...

应用安全:JAVA反序列化漏洞之殇
应用安全:JAVA反序列化漏洞之殇 概述 序列化是让Java对象脱离Java运行环境的一种手段,可以有效的实现多平台之间的通信、对象持久化存储。Java 序列化是指把 Java 对象转换为字节序列的过程便于保存在内存、文件、数据库中,ObjectOutputStream类的 wri…...
)
基于以太坊的智能合约开发Solidity(函数继承篇)
参考教程:【实战篇】1、函数重载_哔哩哔哩_bilibili 1、函数重载: pragma solidity ^0.5.17;contract overLoadTest {//不带参数function test() public{}//带一个参数function test(address account) public{}//参数类型不同,虽然uint160可…...

【论文极速读】LVM,视觉大模型的GPT时刻?
【论文极速读】LVM,视觉大模型的GPT时刻? FesianXu 20231210 at Baidu Search Team 前言 这一周,LVM在arxiv上刚挂出不久,就被众多自媒体宣传为『视觉大模型的GPT时刻』,笔者抱着强烈的好奇心,在繁忙工作之…...

TS基础语法
前言: 因为在写前端的时候,发现很多UI组件的语法都已经开始使用TS语法,不学习TS根本看不到懂,所以简单的学一下TS语法。为了看UI组件的简单代码,不至于一脸懵。 一、安装node 对于windows来讲,node版本高…...

【基于NLP的微博情感分析:从数据爬取到情感洞察】
基于NLP的微博情感分析:从数据爬取到情感洞察 背景数据集技术选型功能实现创新点 今天我将分享一个基于NLP的微博情感分析项目,通过Python技术、NLP模型和Flask框架,对微博数据进行清洗、分词、可视化,并利用NLP和贝叶斯进行情感分…...

长尾关键词自动化扩展:从1个种子词到1000个长尾词
长尾关键词是SEO的蓝海。我开发了一套系统,能从1个种子词自动扩展到1000个长尾词,并且评估每个词的竞争度和价值。这篇文章分享完整方案。一、长尾词扩展的方法 1.1 搜索建议扩展 def expand_keywords_from_suggestions(seed: str, api_key: str, depth:…...

零和博弈 vs 正和系统:用强化学习原理破解组织内耗
1. 项目概述:从办公室茶水间到算法沙盒,零和与正和到底在争什么?你有没有经历过这样的场景:部门刚拿到一笔季度奖金池,五个人分三十万。A悄悄把B的客户案例写进自己的述职PPT;C在跨组协作时故意延迟交付&am…...

山东甲亢专治医院哪个好
近年来,甲状腺疾病发病率呈上升趋势,甲亢因其症状多样、影响广泛,成为困扰许多人的健康问题。面对这一状况,如何在山东地区选择一家专业、可靠的医院进行诊治,是众多患者及家属关心的核心问题。专业的诊疗不仅关乎症状…...

Agent 时代的开发者技能树重构指南
1. 标题选项 核心关键词:AI Agent、开发者转型、技能树重构、职业跃迁 《Agent 时代降临:普通开发者的技能树重构全指南,从CRUD Boy到AI应用工程师的跃迁之路》 《别再只会写CRUD了!AI Agent浪潮下,你必须掌握的新技能树体系》 《从软件开发到AI Agent开发:2024年开发者技…...

别再走弯路!2026亲测靠谱的AI论文写作工具|安心版
2026 年学术写作工具已高度分化,千笔AI与ThouPen为全流程首选,豆包、DeepSeek 为专项强手;避坑关键:拒绝假文献、严控 AIGC 率、优先国内适配、免费试用先行。 一、TOP3 全流程首选(亲测不踩雷) 1. 千笔AI&…...

AI时代工程师的核心价值:从写代码到定义问题
1. 这不是“AI取代程序员”的老调重弹,而是职业坐标的重新校准你最近有没有在刷技术社区时,被两条截然相反的消息撞得有点懵?一条说“编码岗位正站在悬崖边上”,另一条却高呼“这是工程师黄金十年的起点”。这不是媒体制造焦虑的标…...

3分钟掌握PCB交互式BOM:告别传统表格的终极可视化方案
3分钟掌握PCB交互式BOM:告别传统表格的终极可视化方案 【免费下载链接】InteractiveHtmlBom Interactive HTML BOM generation plugin for KiCad, EasyEDA, Eagle, Fusion360 and Allegro PCB designer 项目地址: https://gitcode.com/gh_mirrors/in/InteractiveH…...

python拼装模型商城销售管理系统
目录同行可拿货,招校园代理 ,本人源头供货商项目概述核心功能技术栈特色亮点适用场景项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货商 项目概述 Python拼装模型商…...

【独家首发】DeepSeek-VL与R1双模型事实校验对照实验:1276条权威知识链验证,误差分布首次公开
更多请点击: https://kaifayun.com 第一章:DeepSeek事实准确性测试 为系统评估 DeepSeek-R1 模型在开放域事实性问答中的表现,我们构建了覆盖科学、历史、技术与常识四大领域的 1,200 条人工校验真值(ground-truth)测…...

一个月 SQL 学习总结:LeetCode 高频 SQL 50 题刷题心得
最近花了一个月时间系统学习 SQL,主要是跟着 LeetCode 的「高频 SQL 50 题(基础版)」进行练习。 回过头来看,这一个月的学习虽然不算特别长,但让我对 SQL 的理解比以前清晰了很多,也积累了一些适合初学者的…...