《opencv实用探索·十八》Camshift进行目标追踪流程
CamShift(Continuously Adaptive Mean Shift)是一种用于目标跟踪的方法,它是均值漂移(Mean Shift)的扩展,支持对目标的旋转跟踪,能够对目标的大小和形状进行自适应调整。
cv::CamShift和cv::meanShift区别:
cv::meanShift: 这是一种用于均值漂移目标跟踪的算法。它基于颜色直方图的均值漂移,寻找输入图像中与模板颜色直方图最相似的区域。在这个算法中,窗口的位置根据均值漂移进行调整,直到找到目标对象。cv::meanShift 返回找到的目标的矩形区域。但它的不足之处在于检测窗口的大小是固定的,而目标是不断变化的比如由近到远,各种旋转,固定的窗口是不合适的。
cv::CamShift: 这是 cv::meanShift 的扩展,用于在图像中寻找旋转目标的位置。cv::CamShift 在 cv::meanShift 的基础上引入了旋转矩形,使得它能够更好地适应旋转目标的情况。实际上,cv::CamShift 返回的是一个旋转矩形(cv::RotatedRect),而不仅仅是矩形。同时,能够对目标的大小和形状进行自适应调整,适用于目标尺寸和形状变化较大的情况下。
下面左图是meanShift,右图是CamShift追踪效果对比,可以看到随着目标有近到远变小,meanShfit追踪窗口始终固定不变,而CamShift能实时变化。

meanShift原理:
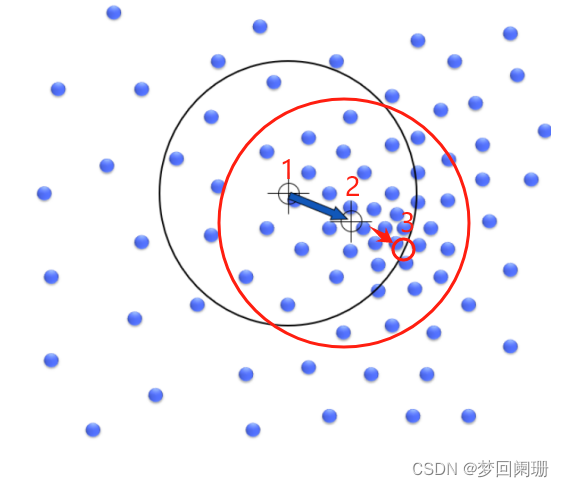
图中一堆点集,任意位置有个圆形窗口(黑色圆),可以看到窗口的圆心(点1位置)和窗口的质心(点2位置)并不重合,那么这个窗口的圆心便会向质心的方向移动,当圆心1与质心2大致重合时圆的位置大概在红色圆的位置,此时在被红色圆覆盖的点集中3的位置为点集最密集的地方,此时红色圆的质心又被更新到3的位置,那么圆便会继续从2的位置向3的位置移动。
不断执行上面的过程直到圆心最终和质心大致重合。每次迭代移动的矢量即meanShift。
meanShift算法的基本思路:
先设置一个感兴趣窗口(通常为矩形),计算窗口内像素的颜色直方图作为目标对象,根据目标对象的颜色分布,通过不断迭代计算窗口的平均漂移来更新窗口的位置和大小,从而实现目标的实时跟踪。
camShift算法原理是在meanShift基础上加入了自适应调整目标窗口大小和旋转方向实现目标的实时跟踪。
利用opencv的camShift算法来追踪目标:
RotatedRect CamShift( InputArray probImage, CV_IN_OUT Rect& window,TermCriteria criteria );
probImage:表示概率图像,通常是反向投影的结果。反向投影是基于目标的颜色直方图,用于估计在图像中的可能位置。
window:输入时表示追踪的初始窗口,输出时表示找到的新窗口。这是一个矩形,也就是目标区域的初始位置。
criteria:指定迭代的停止条件,通常是一个 cv::TermCriteria 类型的对象。它定义了迭代的最大次数、最小精度,或两者的组合。
cv::CamShift 函数返回一个 cv::RotatedRect 对象,它表示找到的目标的位置、方向和大小。
camShift追踪流程:
(1)首先在图像上选定一个目标区域(通常为矩形)
(2)计算选定区域的直方图分布,一般是HSV色彩空间的直方图。
(3)对下一帧图像B同样计算直方图分布。
(4)计算图像B当中与选定区域直方图分布最为相似的区域,即比较图像B的直方图和目标对象的直方图,生成一个反向投影图像。这个反向投影图像的每个像素值表示图像B该位置的像素值与目标对象直方图的相似程度。(反向投影图像可以将图像中与给定模式(目标对象)具有相似颜色分布的区域显著地突出显示)
(5)使用camshift算法将选定区域沿着最为相似的部分进行移动,直到找到最相似的区域,便完成了在图像b中的目标追踪。
(6)重复3到5的过程,就完成整个视频目标追踪。
下面是代码示例:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
//-----------------------------------【全局变量声明】-----------------------------------------
// 描述:声明全局变量
//-------------------------------------------------------------------------------------------------
Mat image;
bool selectObject = false;
Point origin;
Rect selection;
int vmin = 10, vmax = 255, smin = 30;
bool isSelectRoi = false;
bool targetTrackingEnable = false;
Mat roi_hist;
int channels[] = { 0 };
int histSize = 180; //bin分为180份
float range[] = { 0, 180 };
const float* histRange = { range };
TermCriteria term_crit_; //--------------------------------【onMouse( )回调函数】------------------------------------
// 描述:鼠标操作回调
//-------------------------------------------------------------------------------------------------
static void onMouse(int event, int x, int y, int, void*)
{if (selectObject){selection.x = MIN(x, origin.x);selection.y = MIN(y, origin.y);selection.width = std::abs(x - origin.x);selection.height = std::abs(y - origin.y);selection &= Rect(0, 0, image.cols, image.rows);}switch (event){case EVENT_LBUTTONDOWN:origin = Point(x, y);selection = Rect(x, y, 0, 0);selectObject = true;targetTrackingEnable = false;break;case EVENT_LBUTTONUP:selectObject = false;if (selection.width > 0 && selection.height > 0)isSelectRoi = true;break;}
}int main(int argc, const char** argv)
{VideoCapture cap;Rect trackWindow;int hsize = 16;float hranges[] = { 0,180 };const float* phranges = hranges;cap.open(0);if (!cap.isOpened()){cout << "不能初始化摄像头\n";}namedWindow("Histogram", 0);namedWindow("CamShift Demo", 0);setMouseCallback("CamShift Demo", onMouse, 0);//设置滚动条可以在二值化图像时实时改变阈值createTrackbar("Vmin", "CamShift Demo", &vmin, 256, 0);createTrackbar("Vmax", "CamShift Demo", &vmax, 256, 0);createTrackbar("Smin", "CamShift Demo", &smin, 256, 0);Mat frame;for (;;){cap >> frame;if (frame.empty())break;frame.copyTo(image);if (isSelectRoi){//获取第一帧图像并指定ROI区域Mat roi_hsv;Mat roi = image(selection); //截取鼠标绘制的roicvtColor(roi, roi_hsv, COLOR_BGR2HSV); //把roi图像转为hsv色彩图像//去除低亮度值,二值化图像,低亮度置0,高亮度置1Mat mask;int _vmin = vmin, _vmax = vmax;inRange(roi_hsv, Scalar(0, smin, MIN(_vmin, _vmax)),Scalar(180, 255, MAX(_vmin, _vmax)), mask);//计算直方图/*在HSV颜色空间中,H(色相)的取值范围是[0, 360),而在OpenCV中,H通道的取值范围被映射到[0, 180)。这是因为OpenCV中对H通道的取值范围进行了缩放,将360度映射到了180度。所以,在使用 calcHist 函数计算直方图时,range[] 参数用于指定每个通道的取值范围。对于HSV颜色空间中的H通道,这里使用的是[0, 180)。这确保了直方图的统计考虑了整个H通道的取值范围。如果你的颜色空间是RGB,而不是HSV,那么在计算直方图时,range[] 参数应该是[0, 256)。这样就能覆盖RGB图像中每个通道的所有可能取值。*/calcHist(&roi_hsv, 1, channels, mask, roi_hist, 1, &histSize, &histRange);// 归一化normalize(roi_hist, roi_hist, 0, 255, NORM_MINMAX);// 4. 目标追踪// 4.1 设置窗口搜索终止条件:最大迭代次数,窗口中心漂移最小值TermCriteria term_crit(TermCriteria::EPS | TermCriteria::COUNT, 10, 1);term_crit_ = term_crit;waitKey(30);isSelectRoi = false;targetTrackingEnable = true;}else if (targetTrackingEnable){// 4.2 计算直方图的反向投影Mat hsv;cvtColor(image, hsv, COLOR_BGR2HSV); //把输入图像转为hsv色彩图像Mat backProject;cv::calcBackProject(&hsv, 1, channels, roi_hist, backProject, &histRange);// 4.3 进行meanshift追踪RotatedRect track_box = cv::CamShift(backProject, selection, term_crit_);// 4.4 将追踪的位置绘制在视频上,并进行显示ellipse(image, track_box, Scalar(0, 0, 255), 2);imshow("CamShift Demo", image);if (waitKey(30) == 'q')break;}if (selectObject && selection.width > 0 && selection.height > 0){Mat roi(image, selection);bitwise_not(roi, roi);}imshow("CamShift Demo", image);if (waitKey(30) == 'q')break;}// 5. 资源释放cap.release();destroyAllWindows();return 0;
}效果展示:
Camshift的优点:简单,计算量较少,因为Camshift的本质就局部检测,在局部里检测“密度”最大的位置。
Camshift的缺点:Camshift的优点有时候也正是其缺点,因为其简单,所以对于复杂背景或者纹理丰富的物体跟踪效果较差。因为Camshift是对直方图反投影所形成的二值图像进行处理的,如果背景较为复杂或者物体的纹理较为丰富,那么此二值图像的噪声就很多(具体原因可参考直方图反投影的原理),这将直接干扰Camshift对物体位置的判断。
所以对Camshift的总结为:Camshift适用于物体表面颜色较为单一,且和背景颜色差距较大

相关文章:
《opencv实用探索·十八》Camshift进行目标追踪流程
CamShift(Continuously Adaptive Mean Shift)是一种用于目标跟踪的方法,它是均值漂移(Mean Shift)的扩展,支持对目标的旋转跟踪,能够对目标的大小和形状进行自适应调整。 cv::CamShift和cv::me…...
MAP: Multimodal Uncertainty-Aware Vision-Language Pre-training Model
问题 多模态语义理解通常需要处理不确定性,这意味着获得的消息往往涉及多个目标。这种不确定性对我们的解释来说是有问题的,包括模式间和模式内的不确定性。人们很少研究这种不确定性的建模,特别是在未标记数据集的预训练和特定任务下游数据…...
【SpringCache】快速入门 通俗易懂
1. 介绍 Spring Cache 是一个框架,实现了基于注解的缓存功能,只需要简单地加一个注解,就能实现缓存功能。 Spring Cache 提供了一层抽象,底层可以切换不同的缓存实现,例如: EHCache Caffeine Redis(常用…...

GeoTools学习笔记
Feature要素: 例子:Csv2Shape.java 创建要素,先创建FeatureType,再创建Feature 根据FeatureCollection,可以创建shapefile https://docs.geotools.org/latest/userguide/library/main/data.html API详解:…...

短剧规模达到了百亿元,短剧分销成为短剧新模式
我国短剧市场规模直接突破了三百多亿元,目前已经是互联网的一大创业风口! 一、短剧特点 在当下快节奏的生活中,短剧具有的快节奏、剧情紧凑的特点,符合大众对影视的需求。目前我国的短剧题材主要是言情、总裁、赘婿等࿰…...

Kotlin 中的 `as` 关键字:类型转换的艺术
在 Android 编程中,类型转换是一项常见的操作。为了使这一过程更加流畅和安全,Kotlin 提供了 as 关键字。本文将深入探讨 as 关键字的用法和最佳实践。 一、as 关键字的基本概念 🚀 as 关键字在 Kotlin 中用于显式类型转换。它将一个表达式…...

CDN可以给企业网站带来哪些优势?
企业网站带来哪些优势?现在企业最关心的问题,就是我的网站能不能打开,用户访问到的是不是正常的页面,网站是否能够正常运营,而互联网是 一个开放式的平台,网站是否能够正常运营和很多因素都有关系ÿ…...

离线运行Oracle Database In-Memory Advisor
概念 离线运行Oracle Database In-Memory Advisor,就是不在生产系统上运行。这样可以避免影响生产系统。但需要从生产系统导出以下的数据: AWR DumpAWR补充数据 过程 导出AWR Dump 连接到CDB root运行。 SQL> connect / as sysdba SQL> ?/r…...
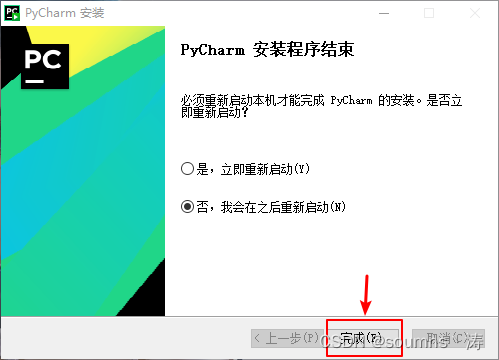
2,PyCharm的下载与安装
1,PyCharm的下载 a:打开PyCharm官网,并选择Developer Tools → PyCharm Pycharm官网地址 b:点击Download c:下载完成后,会在下载文件夹中,出现“pycharm-professional-2023.3.exe”文件 2&a…...

HNU计算机视觉作业一
前言 选修的是蔡mj老师的计算机视觉,上课还是不错的,但是OpenCV可能需要自己学才能完整把作业写出来。由于没有认真学,这门课最后混了80多分,所以下面作业解题过程均为自己写的,并不是标准答案,仅供参考 …...

Java:SpringBoot获取当前运行的环境activeProfile
代码示例 /*** 启动监听器*/ Component public class AppListener implements ApplicationListener<ApplicationReadyEvent> {Overridepublic void onApplicationEvent(ApplicationReadyEvent event) {// 获取当前的环境,如果是test,则直接返回Co…...
射频功率放大器的参数有哪些
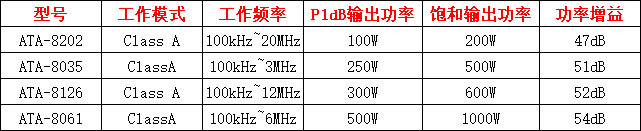
射频功率放大器是射频通信系统中重要的组件,用于将输入的射频信号放大到需要的功率水平。在设计和选择射频功率放大器时,需要考虑多种参数。下面西安安泰将详细介绍射频功率放大器的常见参数。 1、P1dB功率压缩点 当放大器的输入功率比较低时,…...

3-5、多态性
语雀原文链接 文章目录 1、多态类型2、上下转型3、instanceof 1、多态类型 编译时多态:方法重载 在编译阶段就已经确定要调用哪个重载的方法 运行时多态:方法重写 具体调用哪个子类的方法要到运行的时候,结果才能确定,多态只针对…...

什么是https 加密协议?
什么是https 加密协议? 加密通信的作用加密原理数字证书SSL/TLS 协议部署和使用重要性 HTTPS(Hyper Text Transfer Protocol Secure)是一种网络传输协议,它是基于HTTP协议的扩展,通过加密通信内容来保障数据传输的安全…...

低压无功补偿在分布式光伏现场中的应用
摘要:分布式光伏电站由于建设时间短、技术成熟、收益明显而发展迅速,但光伏并网引起用户功率因数异常的问题也逐渐凸显。针对分布式光伏电站接入配电网后功率因数降低的问题,本文分析了低压无功补偿装置补偿失效的原因,并提出了一…...

人工智能技术在宽域飞行器控制中的应用
近年来,以空天飞行器、高超声速飞行器等 ̈1 为典型代表的宽域飞行器蓬勃发展,如图1所示,其 不仅对高端装备制造、空间信息以及太空经济等领 域产生辐射带动作用,进一步提升了中国在航空航 天领域的自主创新能力,同时也…...

NGINX高性能服务器与关键概念解析
目录 1 NGINX简介2 NGINX的特性3 正向代理4 反向代理5 负载均衡6 动静分离7 高可用8 结语 1 NGINX简介 NGINX(“engine x”)在网络服务器和代理服务器领域备受推崇。作为一款高性能的 HTTP 和反向代理服务器,它以轻量级、高并发处理能力以及…...

云ssrf
https://book.hacktricks.xyz/pentesting-web/ssrf-server-side-request-forgery/cloud-ssrf SSRF -> EC2 Metadata API -> IAM临时Security Token -> AWS SSM -> RCESSRF -> EC2 Metadata API -> IAM临时Security Token -> AWS Lambda -> RCESSRF -&g…...
)
面试题目总结(三)
1. Spring、Springboot、springMVC、Spring Cloud 的区别: Spring:Spring 是一个开源的、轻量级的Java框架,提供了丰富的功能和组件,用于构建企业级应用程序。Spring框架包含了很多模块,包括核心容器、数据访问、事物…...
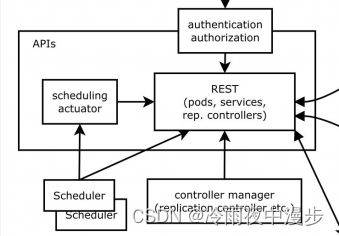
Kubernetes入门笔记——(2)k8s设计文档
k8s最初源自谷歌的Brog项目,架构与其类似,主要包括etcd、api server、controller manager、scheduler、kubelet和kube-proxy等组件 etcd:分布式存储,保存k8s集群的状态 api server:资源操作的唯一入口,…...

利用快马ai快速构建can协议数据监控工具原型
利用快马AI快速构建CAN协议数据监控工具原型 最近在做一个汽车电子相关的项目,需要监控CAN总线上的数据。作为初学者,我对CAN协议的理解还停留在理论层面,实际开发时发现从零搭建解析工具非常耗时。好在发现了InsCode(快马)平台,…...

Qwen3-VL-8B在软件测试中的应用:自动生成测试用例与缺陷报告截图分析
Qwen3-VL-8B在软件测试中的应用:自动生成测试用例与缺陷报告截图分析 最近和几个做软件测试的朋友聊天,大家普遍都在吐槽一件事:写测试用例和缺陷报告太费时间了。尤其是现在敏捷开发节奏快,版本迭代频繁,测试人员不仅…...

多视图数据太‘脏’怎么办?手把手教你用对比学习过滤视图私有噪声
多视图数据噪声过滤实战:对比学习在特征提纯中的应用 当面对来自多个来源的异构数据时,数据科学家们常常陷入两难——如何有效整合这些信息,同时避免噪声干扰?传统方法往往简单粗暴地融合所有视图,却忽视了不同数据源特…...

从零打造微信聊天记录导出工具:PySide6界面开发与PyInstaller打包实战
1. 为什么需要自己开发微信聊天记录导出工具 最近有不少朋友问我,为什么市面上那么多微信聊天记录导出工具,还要自己动手开发?这个问题问得好。作为一个经常需要备份聊天记录的程序员,我试过不下十款工具,发现它们普遍…...

如何判断 SEO 排名推广的投资是否值得
SEO 排名推广的投资是否值得:深入分析与实用建议 在当今数字化时代,SEO(搜索引擎优化)排名推广已成为许多企业获取在线流量和潜在客户的重要手段。面对高昂的SEO推广费用,企业往往会纠结于“这笔投资是否值得”这一问…...

SEO_从零开始,手把手教你制定有效的SEO策略
SEO基础知识:什么是SEO? 在互联网时代,拥有一个高效的SEO策略是任何网站希望获得更多流量和更高知名度的关键。SEO,全称搜索引擎优化(Search Engine Optimization),是通过优化网站的内容和结构…...

别再只会‘永不在此停止’了!实战绕过网站JS混淆与内存爆破的三种硬核方法
实战突破:三种硬核方法破解JS混淆与内存爆破 打开开发者工具的那一刻,页面突然卡死,控制台不断弹出debugger断点——这可能是每个爬虫工程师都经历过的噩梦。当简单的"永不在此停止"失效时,我们需要更高级的技术手段来应…...

Java中的修饰符,类,接口,多态
最近学了Java中的修饰符,类,接口,多态1.修饰符学了public,默认,protected,private。public是公用的,都能访问。默认的话只能在同类中和同包中调用,而protected则可以在同类中&#x…...

基于OFA的智能零售解决方案:商品图像自动问答系统
基于OFA的智能零售解决方案:商品图像自动问答系统 1. 引言 走进任何一家现代零售店,你都会看到顾客拿着商品反复查看标签、比较价格、寻找成分信息。这种场景每天都在全球数百万家商店中重复上演。店员们疲于应对各种"这个产品有没有过敏源&#…...

高德地图多类型点聚合的优化实践
1. 高德地图点聚合的痛点与优化思路 第一次接触高德地图点聚合功能时,我遇到了一个很实际的问题:当地图上需要同时显示餐厅、酒店、景点等不同类型的POI点时,传统的单一点聚合会把所有类型混在一起统计。想象一下,当你在地图上看到…...