【ROS2知识】关于colcon编译和ament指定
一、说明
这里说说编译和包生成的操作要点,以python包为例。对于初学者来说,colcon和ament需要概念上搞清楚,与此同时,工作空间、包、节点在一个工程中需要熟练掌握。本文以humble版的ROS2,进行python编程的实现。
二、编译器安装配置
2.1 关于编译器的安装
colcon是ros2的编译器,如果我们想看到colcon编译器,需要到指定位置:
ls /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash如果没有安装,需要如下语句安装之:
sudo apt updatesudo apt install python3-colcon-common-extensions一般来说,在安装humble版ros2,已经安装好colcon,以上步骤可以忽略。
2.2 关于编译器的配置
在~/.bashrc中配置编译器:
vim ~/.bashrc将以下语句追加到~/.bashrc的最后语句。
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash
三、建立工程
3.1 建立工程的工作空间
cd ~/tmp
mkdir -p ros2_ws/src3.2 编译一个空的workspace
编译一个空的工程:
cd ros2_ws
colcon build设置系统路径、编译器路径、本工程的路径,路径:sudo gedit ~/.bashrc,追加如下:
source /opt/ros/humble/setup.bashsource /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bashsource ~/tmp/ros2_ws/install/setup.bash四、建立一个软件包
4.1 生成一个包
注意包生成的路径:
cd ros2_ws/src生成一个包:
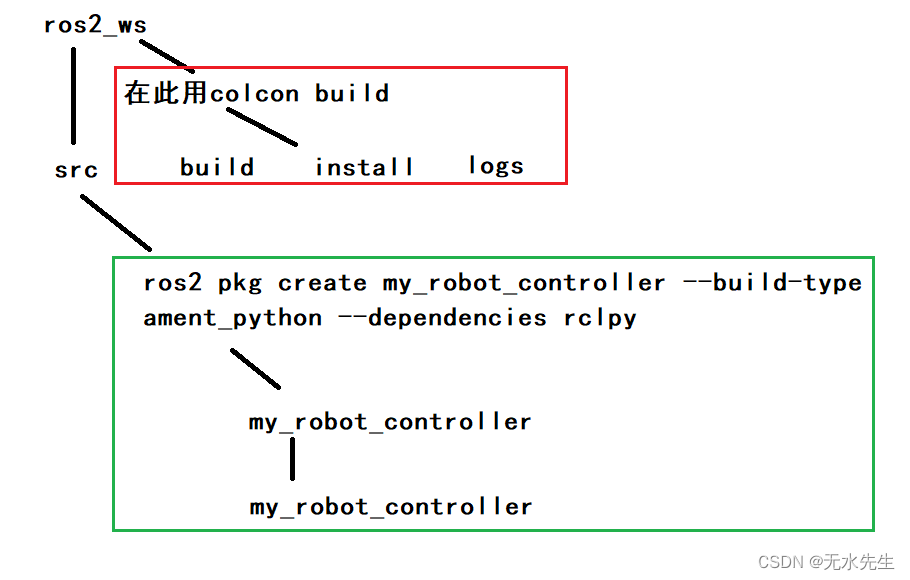
ros2 pkg create my_robot_controller --build-type ament_python --dependencies rclpy
通过以上create语句,生成一个名字叫my_robot_controller的包。
4.2 包的在工程中的位置
工作空间中,不外乎两个指令:编译指令、包生成指令,它们执行的地点应该明确了。如下图:
这里参看整个workspace的路径:
cd ros2_ws
tree├── build
│ ├── COLCON_IGNORE
│ └── my_robot_controller
│ ├── build
│ │ └── lib
│ │ └── my_robot_controller
│ │ └── __init__.py
│ ├── colcon_build.rc
│ ├── colcon_command_prefix_setup_py.sh
│ ├── colcon_command_prefix_setup_py.sh.env
│ ├── install.log
│ ├── my_robot_controller.egg-info
│ │ ├── dependency_links.txt
│ │ ├── entry_points.txt
│ │ ├── PKG-INFO
│ │ ├── requires.txt
│ │ ├── SOURCES.txt
│ │ ├── top_level.txt
│ │ └── zip-safe
│ └── prefix_override
│ ├── __pycache__
│ │ └── sitecustomize.cpython-310.pyc
│ └── sitecustomize.py
├── install
│ ├── COLCON_IGNORE
│ ├── local_setup.bash
│ ├── local_setup.ps1
│ ├── local_setup.sh
│ ├── _local_setup_util_ps1.py
│ ├── _local_setup_util_sh.py
│ ├── local_setup.zsh
│ ├── my_robot_controller
│ │ ├── lib
│ │ │ └── python3.10
│ │ │ └── site-packages
│ │ │ ├── my_robot_controller
│ │ │ │ ├── __init__.py
│ │ │ │ └── __pycache__
│ │ │ │ └── __init__.cpython-310.pyc
│ │ │ └── my_robot_controller-0.0.0-py3.10.egg-info
│ │ │ ├── dependency_links.txt
│ │ │ ├── entry_points.txt
│ │ │ ├── PKG-INFO
│ │ │ ├── requires.txt
│ │ │ ├── SOURCES.txt
│ │ │ ├── top_level.txt
│ │ │ └── zip-safe
│ │ └── share
│ │ ├── ament_index
│ │ │ └── resource_index
│ │ │ └── packages
│ │ │ └── my_robot_controller
│ │ ├── colcon-core
│ │ │ └── packages
│ │ │ └── my_robot_controller
│ │ └── my_robot_controller
│ │ ├── hook
│ │ │ ├── ament_prefix_path.dsv
│ │ │ ├── ament_prefix_path.ps1
│ │ │ ├── ament_prefix_path.sh
│ │ │ ├── pythonpath.dsv
│ │ │ ├── pythonpath.ps1
│ │ │ └── pythonpath.sh
│ │ ├── package.bash
│ │ ├── package.dsv
│ │ ├── package.ps1
│ │ ├── package.sh
│ │ ├── package.xml
│ │ └── package.zsh
│ ├── setup.bash
│ ├── setup.ps1
│ ├── setup.sh
│ └── setup.zsh
├── log
│ ├── build_2023-03-02_10-42-14
│ │ ├── events.log
│ │ └── logger_all.log
│ ├── build_2023-03-02_10-50-32
│ │ ├── events.log
│ │ ├── logger_all.log
│ │ └── my_robot_controller
│ │ ├── command.log
│ │ ├── stderr.log
│ │ ├── stdout.log
│ │ ├── stdout_stderr.log
│ │ └── streams.log
│ ├── build_2023-03-02_10-57-14
│ │ ├── events.log
│ │ ├── logger_all.log
│ │ └── my_robot_controller
│ │ ├── command.log
│ │ ├── stderr.log
│ │ ├── stdout.log
│ │ ├── stdout_stderr.log
│ │ └── streams.log
│ ├── COLCON_IGNORE
│ ├── latest -> latest_build
│ └── latest_build -> build_2023-03-02_10-57-14
└── src└── my_robot_controller├── my_robot_controller│ ├── __init__.py│ └── my_first_node.py├── package.xml├── resource│ └── my_robot_controller├── setup.cfg├── setup.py└── test├── test_copyright.py├── test_flake8.py└── test_pep257.py4.3 包生成后重新编译
在包生成后,进行一次空的编译:
cd ros2_ws
colcon build如果出现下述信息,恭喜您有中着了:
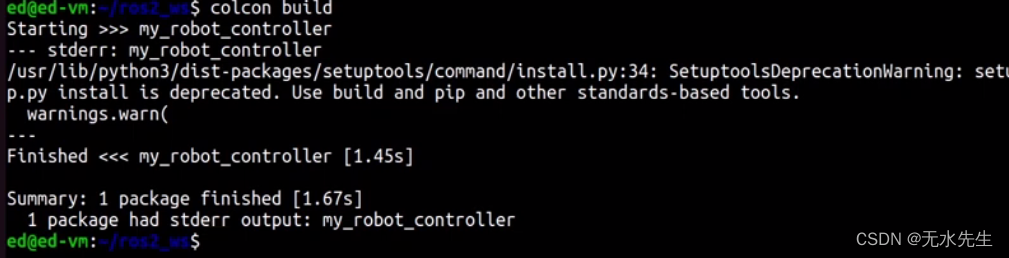
这里错误原因是:setuptooks版本太高引起,查看版本:
pip3 list (如果没有pip3用sudo apt install python3-pip安装。)
pip3 list |grep setuptools

用 pip install setuptools==58.2.0 语句可以降低版本,然后执行无误。
五、生成python节点
5.1 节点程序位置
在以上的工作空间,找到包路径:
cd ./ros2_ws/src/my_robot_controller/my_robot_controller5.2 编写节点
文件名称:
sudo vim first_node.py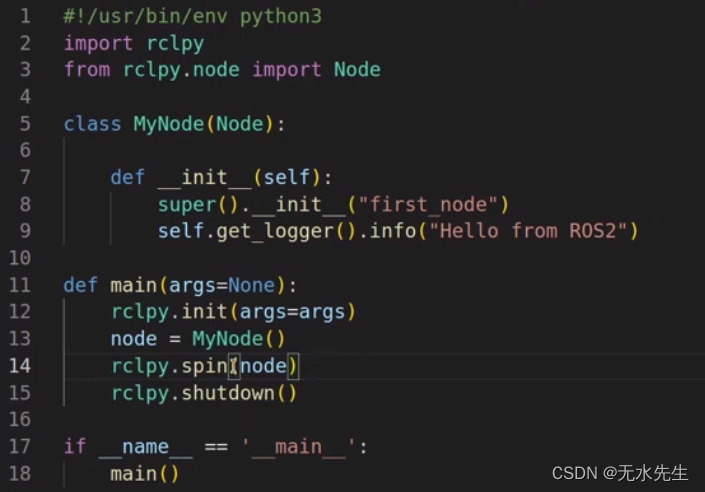
将上述文件保存后,执行colcon编译。(注意:colcon总是在workspace路径上执行)
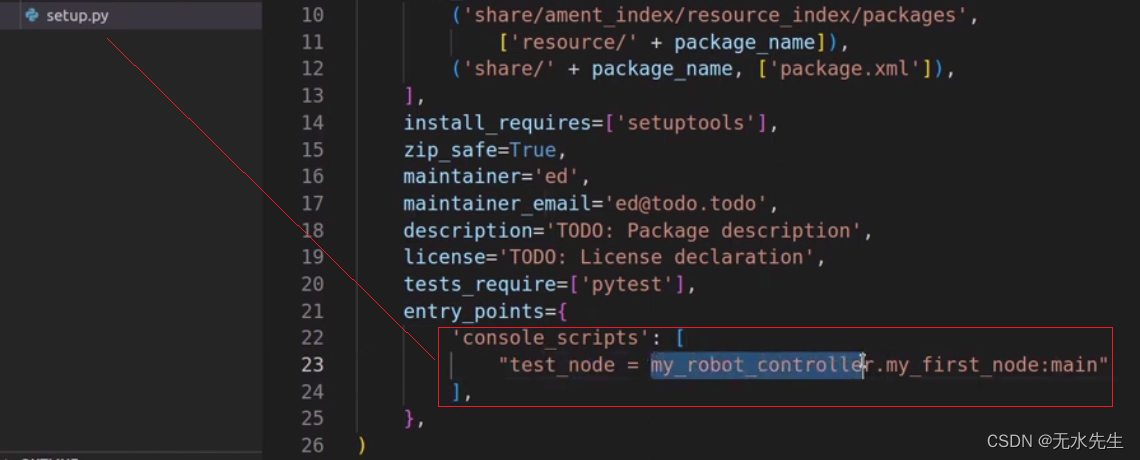
在setup.py配置如下:
再次强调,需要source文件.bashrc
source /opt/ros/humble/setup.bashsource /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bashsource ~/tmp/ros2_ws/install/setup.bash再次编译,编译过后:执行
ros2 run my_robot_controller test_node
可以启动。注意这里test_node也可以用first_node.py代替。
相关文章:
【ROS2知识】关于colcon编译和ament指定
一、说明 这里说说编译和包生成的操作要点,以python包为例。对于初学者来说,colcon和ament需要概念上搞清楚,与此同时,工作空间、包、节点在一个工程中需要熟练掌握。本文以humble版的ROS2,进行python编程的实现。 二、…...

数据结构: 最小栈
最小栈的特色是保持栈后进先出的特性,同时能够以O(1)复杂度获得当前栈的最小值。 栈是比较好实现的,直接搞个链表,从头部删除和添加即可。 最小栈的核心逻辑是: 因为栈是后进先出的,因此栈顶元素之下的数字永远在栈…...
STM32之PWM
PWMPWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调…...

操作系统(1.1)--引论
目录 一、操作系统的目标和作用 1.操作系统的目标 2.操作系统的作用 2.1 OS作为用户与计算机硬件系统之间的接口 2.2 OS作为计算机系统资源的管理者 2.3 0S实现了对计算机资源的抽象 3. 推动操作系统发展的主要动力 二、操作系统的发展过程 1.无操作系统的计算机系统…...
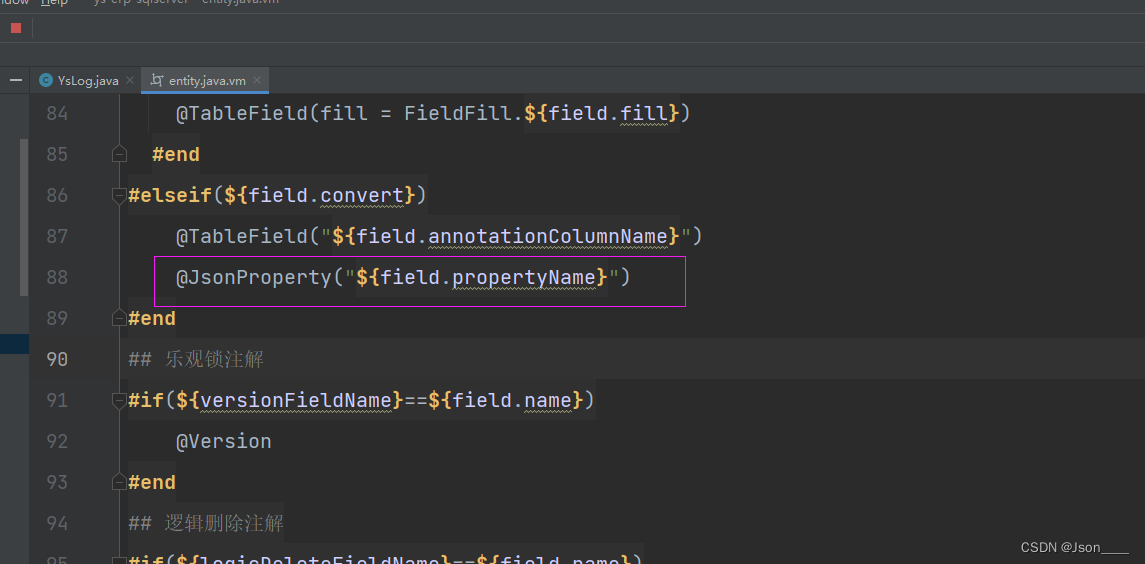
Spring boot + mybatis-plus 遇到 数据库字段 创建不规范 大驼峰 下划线 导致前端传参数 后端收不到参数 解决方案
最近使用springboot 连接了一个 sqlserver 数据库 由于数据库年数久远 ,建表字段不规范 大驼峰 下划线的字段名都有 但是 java 中 Spring boot mybatis-plus 又严格按照小驼峰 格式 生成实体类 如果不是小驼峰格式 Data 注解 get set 方法 在前端请求参数 使用这个…...

JavaScript String 字符串对象
文章目录JavaScript String 字符串对象JavaScript 字符串字符串(String)在字符串中查找字符串内容匹配替换内容字符串大小写转换字符串转为数组特殊字符字符串属性和方法JavaScript String 字符串对象 String 对象用于处理已有的字符块。 JavaScript 字…...
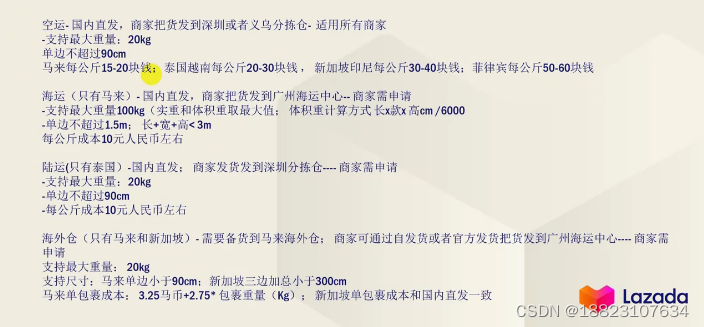
Lazada如何做好店铺运营?产品定价是关键
1.东南亚各国状况一览(对比中国) 2.东南亚消费水平真的很低? 精准定价的意义:定价过高,失去核心竞争力;定价过低,亏本对市场失去信心;价格改动,流量下降 定价公式&#…...

空口协议Eapol、802.11 Action、802.11 BAR 和 802.11BA、802.11 Encrypted Data讲解
如下报文 可以看到,除了有之前开放认证的报文之外,还多了 EAPOL 次握手的报文。另外,还有其他几种类型的报文:802.11 Action、802.11 BAR 和 802.11BA、802.11 Encrypted Data 密匙认证协议EAPOL: EAP是Extensible Authentication Protocol的缩写,EAPOL就是(EAP…...

C++类和对象
目录 一、C类定义 二、定义C对象 三、访问数据成员 四、类和对象详解 C 在 C 语言的基础上增加了面向对象编程,C 支持面向对象程序设计。类是 C 的核心特性,通常被称为用户定义的类型。 类用于指定对象的形式,它包含了数据表示法和用于处…...

Leetcode.面试题 05.02 二进制数转字符串
题目链接 面试题 05.02 二进制数转字符串 Mid 题目描述 二进制数转字符串。给定一个介于0和1之间的实数(如0.72),类型为double,打印它的二进制表达式。如果该数字无法精确地用32位以内的二进制表示,则打印“ERROR”。…...

UDPTCP网络编程
udp编程接口 一个UDP程序的编写可以分为3步: 创建一个网络套接字: 它相当于文件操作时的文件描述符,是一个程序进行网络通讯的门户, 所有的网络操作都要基于它 绑定IP和端口: 需要为网络套接字填充IP和端口信息 但是…...

【微信小程序】-- 全局配置 -- tabBar(十七)
💌 所属专栏:【微信小程序开发教程】 😀 作 者:我是夜阑的狗🐶 🚀 个人简介:一个正在努力学技术的CV工程师,专注基础和实战分享 ,欢迎咨询! &…...

Cortex-A7中断控制器GIC
Cortex-A7中断控制器GIC 中断号 芯片内部的中断都会引起IRQ InterruptGIC将所有的中断源(最多1020个中断ID)分为三类: SPI(SharedPeripheralInterrupt)共享中断,外部中断都属于SPI中断 [ID32-1019]PPI(PrivatePeripheralInterrupt)私有中断 [ID16-31]SGI(Software-…...
JavaSE:常用类
前言从现在开始进入高级部分的学习,鼓励自己一下!画个大饼: 常用类->集合框架->IO流->多线程->网络编程 ->注解与反射->GUI很重要的东西,不能不会!Object类祖宗类,主要方法:t…...

Element中树形控件在项目中的实际应用
文章目录1、使用目的2、官网组件3、组合使用组件案例4、在项目中实际应用4.1 组合组件的使用4.1.2 代码落地4.1.3 后台接口数据4.1.4 实际效果官网连接直达:Tree树形控件的使用 1、使用目的 用清晰的层级结构展示信息,可展开或折叠。 2、官网组件 <…...
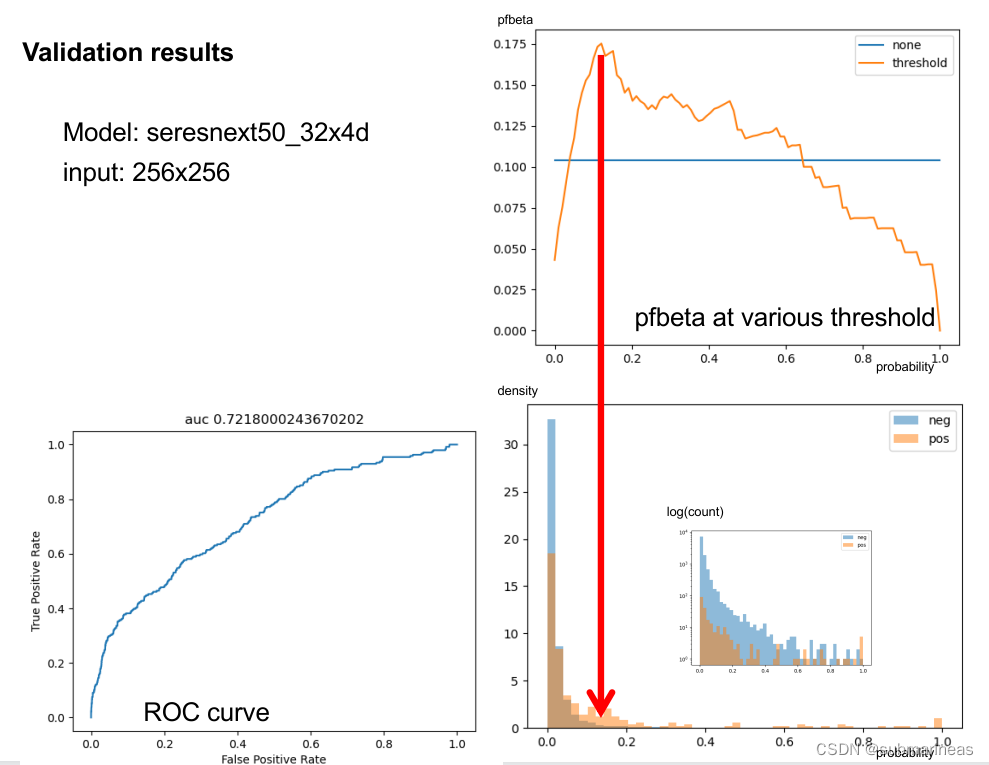
kaggle RSNA 比赛过程总结
引言 算算时间,有差不多两年多没在打kaggle了,自20年最后一场后(其实之前也就打过两场,一场打铁,一场表格赛是金是银不太记得,当时相当于刺激战场,过拟合lb大赛太刺激了,各种trick只…...

51单片机入门————LED灯的控制
LED的电路图通过原理图看出,LED灯是接单片机芯片的P20~P27的一共有8个LED,51单片机也是8字节的P20x010xFE————1111 1110P20xFE可以表示把在P2端的第一个灯点亮1 表示高电平0表示低电平当为0的时候形成一个完整回路,电流从高电平流向低电平…...

J - 二进制与、平方和(线段树 + 维护区间1的个数)
2023河南省赛组队训练赛(二) - Virtual Judge (vjudge.net) 请你维护一个长度为 n 的非负整数序列 a1, a2, ..., an,支持以下两种操作: 第一种操作会将序列 al, al 1, ..., ar 中的每个元素,修改为各自和 x…...
)
BertTokenizer的使用方法(超详细)
导入 from transformers import BertTokenizer from pytorch_pretrained import BertTokenizer以上两行代码都可以导入BerBertTokenizer,transformers是当下比较成熟的库,pytorch_pretrained是google提供的源码(功能不如transformers全面) 加载 tokenizer BertT…...
:编译过程中遇到的问题总结)
深度学习编译器CINN(3):编译过程中遇到的问题总结
目录 问题一:No module named XXXX 问题描述 分析与解决方案 问题二:catastrophic error: cannot open source file "float16.h"...

过零电压比较器基础知识及Multisim电路仿真
目录 2.9 过零电压比较器 2.9.1 过零电压比较器基础知识 1.电路结构与核心定义 2. 工作原理 3. 核心特点与用途 2.9.2 过零电压比较器Multisim电路仿真 2. 仿真逻辑与工作原理 3. 波形解读(右侧瞬态分析结果) 摘要:过零电压比较器是一种阈值电压为0V的单限比较器,利…...

基于MCP协议构建AI知识库:解决会话失忆,实现知识持久化
1. 项目概述:让AI拥有自己的“亚历山大图书馆”如果你和我一样,长期与Claude Code、Cursor这类AI编程助手打交道,一定会遇到一个核心痛点:会话失忆。每次开启一个新对话,AI助手就像一张白纸,它对你项目的历…...

基于Vue 3与UnoCSS构建轻量级个人导航页:从零部署到高级定制
1. 项目概述:一个轻量级、可定制的个人导航页 最近在折腾自己的浏览器主页,厌倦了那些臃肿、广告满天飞的默认页面,也受够了每次都要在书签栏里翻找常用链接。作为一个喜欢把一切工具都“私有化”和“个性化”的开发者,我决定自己…...

GPU云服务器选型指南:从核心参数到实际部署的深度解析
在当下人工智能跟高性能计算急剧速度发展状况里,GPU云服务器正沿着从专业领域迈向更为广泛应用场景的路径前行。对于构成企业的开发者、相关技术团队来讲,怎样精准无误理解这一技术方案所具备的本质,并且于实际选型期间做出合乎情理的判断&am…...

在Linux Mint上搞定Synopsys VCS和Verdi 2018.06:一个学生党的完整踩坑与配置实录
在Linux Mint上搞定Synopsys VCS和Verdi 2018.06:一个学生党的完整踩坑与配置实录 作为一名微电子专业的学生,第一次接触Synopsys的VCS和Verdi工具时,我完全被它们的强大功能所震撼。然而,当我在自己的Linux Mint系统上尝试安装这…...

“找档难、找档慢”困扰工作?档案宝智能检索功能,让档案查询秒响应
目录 档案之痛:效率与风险并存 破局之道:智能检索成关键 写在最后 在日常办公中,你是否遇到过这样的场景:需要调取一份重要合同档案,翻遍整个文件柜却找不到;领导紧急要一份历史数据,手动搜索了…...

硅谷创新精神:从车库、真空管到一美元年薪的启示
1. 硅谷创新精神的物理原点:从车库到孤寂的一美元在科技圈待久了,总会听到一些传奇故事,比如乔布斯在车库里组装第一台苹果电脑,或者惠普的两位创始人在车库里捣鼓出第一个音频振荡器。这些故事被反复传颂,几乎成了硅谷…...

ETS2LA:为《欧洲卡车模拟2》带来终极智能驾驶体验的5大核心功能
ETS2LA:为《欧洲卡车模拟2》带来终极智能驾驶体验的5大核心功能 【免费下载链接】Euro-Truck-Simulator-2-Lane-Assist Plugin based interface program for ETS2/ATS. 项目地址: https://gitcode.com/gh_mirrors/eur/Euro-Truck-Simulator-2-Lane-Assist 想…...
让人惊讶的AI)
图解人工智能(11)让人惊讶的AI
人工智能已经融入到我们的生活之中,如便捷的刷脸支付,帮我们扫地的机器人。想一想,你身边还有哪些有趣的人工智能设备?以一种设备为例,搜索它的相关信息,看它为我们的生活带来了哪些便利。开放讨论题&#…...

Superpower ChatGPT:浏览器扩展如何重塑AI对话管理与提示词工作流
1. 项目概述:Superpower ChatGPT,一个浏览器扩展的深度剖析如果你和我一样,每天都要和ChatGPT打上几个小时的交道,那你肯定也经历过这样的抓狂时刻:想找三天前那段关于Python代码优化的对话,却要在历史记录…...