【深度学习】强化学习(二)马尔可夫决策过程
文章目录
- 一、强化学习问题
- 1、交互的对象
- 2、强化学习的基本要素
- 3、策略(Policy)
- 4、马尔可夫决策过程
- 1. 基本元素
- 2. 交互过程的表示
- 3. 马尔可夫过程(Markov Process)
- 4. 马尔可夫决策过程(MDP)
- 5. 轨迹的概率计算
- 6. 给西瓜浇水问题的马尔可夫决策过程
一、强化学习问题
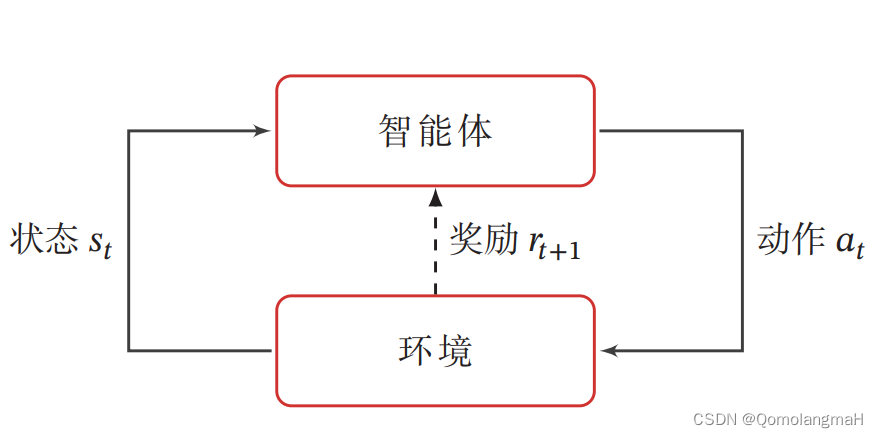
强化学习的基本任务是通过智能体与环境的交互学习一个策略,使得智能体能够在不同的状态下做出最优的动作,以最大化累积奖励。这种学习过程涉及到智能体根据当前状态选择动作,环境根据智能体的动作转移状态,并提供即时奖励的循环过程。
1、交互的对象
在强化学习中,有两个可以进行交互的对象:智能体和环境
-
智能体(Agent):能感知外部环境的状态(State)和获得的奖励(Reward),并做出决策(Action)。智能体的决策和学习功能使其能够根据状态选择不同的动作,学习通过获得的奖励来调整策略。
-
环境(Environment):是智能体外部的所有事物,对智能体的动作做出响应,改变状态,并反馈相应的奖励。
2、强化学习的基本要素
强化学习涉及到智能体与环境的交互,其基本要素包括状态、动作、策略、状态转移概率和即时奖励。
-
状态(State):对环境的描述,可能是离散或连续的。
-
动作(Action):智能体的行为,也可以是离散或连续的。
-
策略(Policy):智能体根据当前状态选择动作的概率分布。
-
状态转移概率(State Transition Probability):在给定状态和动作的情况下,环境转移到下一个状态的概率。
-
即时奖励(Immediate Reward):智能体在执行动作后,环境反馈的奖励。
3、策略(Policy)
策略(Policy)就是智能体如何根据环境状态 𝑠 来决定下一步的动作 𝑎(智能体在特定状态下选择动作的规则或分布)。
- 确定性策略(Deterministic Policy) 直接指定智能体应该采取的具体动作
- 随机性策略(Stochastic Policy) 则考虑了动作的概率分布,增加了对不同动作的探索。
上述概念可详细参照:【深度学习】强化学习(一)强化学习定义
4、马尔可夫决策过程
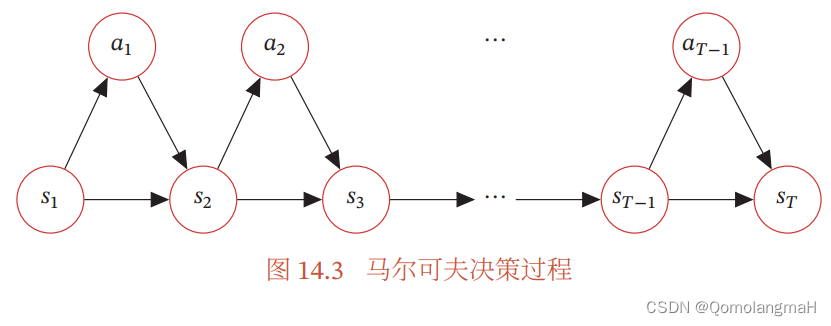
为了简化描述,将智能体与环境的交互看作离散的时间序列。智能体从感知到的初始环境 s 0 s_0 s0 开始,然后决定做一个相应的动作 a 0 a_0 a0,环境相应地发生改变到新的状态 s 1 s_1 s1,并反馈给智能体一个即时奖励 r 1 r_1 r1,然后智能体又根据状态 s 1 s_1 s1做一个动作 a 1 a_1 a1,环境相应改变为 s 2 s_2 s2,并反馈奖励 r 2 r_2 r2。这样的交互可以一直进行下去: s 0 , a 0 , s 1 , r 1 , a 1 , … , s t − 1 , r t − 1 , a t − 1 , s t , r t , … , s_0, a_0, s_1, r_1, a_1, \ldots, s_{t-1}, r_{t-1}, a_{t-1}, s_t, r_t, \ldots, s0,a0,s1,r1,a1,…,st−1,rt−1,at−1,st,rt,…,其中 r t = r ( s t − 1 , a t − 1 , s t ) r_t = r(s_{t-1}, a_{t-1}, s_t) rt=r(st−1,at−1,st) 是第 t t t 时刻的即时奖励。这个交互过程可以被视为一个马尔可夫决策过程(Markov Decision Process,MDP)。
1. 基本元素
-
状态( s t s_t st):
- 表示智能体与环境交互中的当前情况或环境状态。
- 在时间步𝑡时,智能体和环境的状态为 s t s_t st。
-
动作 ( a t a_t at):
- 表示智能体在给定状态 s t s_t st下采取的动作。
- 在时间步𝑡时,智能体选择执行动作 a t a_t at。
-
奖励 ( r t r_t rt):
- 表示在智能体采取动作 a t a_t at后,环境反馈给智能体的即时奖励。
- 在时间步𝑡时,智能体获得奖励 r t r_t rt。
2. 交互过程的表示
- 智能体与环境的交互过程可以用离散时间序列表示:
s 0 , a 0 , s 1 , r 1 , a 1 , … , s t − 1 , r t − 1 , a t − 1 , s t , r t , … , s_0, a_0, s_1, r_1, a_1, \ldots, s_{t-1}, r_{t-1}, a_{t-1}, s_t, r_t, \ldots, s0,a0,s1,r1,a1,…,st−1,rt−1,at−1,st,rt,…, - 在每个时间步,智能体根据当前状态选择一个动作,环境根据智能体的动作和当前状态发生转移,并反馈即时奖励。
- 这种时间序列描述强调了智能体和环境之间的交互,以及在时间步𝑡时智能体和环境的状态、动作和奖励。这符合马尔可夫决策过程的基本定义,其中马尔可夫性质要求当前状态包含了所有与未来预测相关的信息。
3. 马尔可夫过程(Markov Process)
-
定义: 马尔可夫过程是一组具有马尔可夫性质的随机变量序列 s 0 , s 1 , … , s t ∈ S s_0, s_1, \ldots, s_t \in \mathcal{S} s0,s1,…,st∈S,其中 S \mathcal{S} S 是状态空间。
-
马尔可夫性质: 当前状态 s t s_t st 对未来的预测只依赖于当前状态,而不依赖于过去的状态序列( s t − 1 , s t − 2 , … , s 0 s_{t-1}, s_{t-2}, \ldots, s_0 st−1,st−2,…,s0),即
p ( s t + 1 ∣ s t , … , s 0 ) = p ( s t + 1 ∣ s t ) p(s_{t+1} | s_t, \ldots, s_0) = p(s_{t+1} | s_t) p(st+1∣st,…,s0)=p(st+1∣st) -
状态转移概率 p ( s t + 1 ∣ s t ) p(s_{t+1} | s_t) p(st+1∣st): 表示在给定当前状态 s t s_t st 的条件下,下一个时刻的状态为 s t + 1 s_{t+1} st+1 的概率,满足 ∑ S t + 1 ∈ S p ( s t + 1 ∣ s t ) = 1 \sum_{S_{t+1} \in \mathcal{S}}p(s_{t+1} | s_t) = 1 ∑St+1∈Sp(st+1∣st)=1
4. 马尔可夫决策过程(MDP)
-
加入动作: MDP 在马尔可夫过程的基础上引入了动作变量 a t a_t at,表示智能体在状态 s t s_t st 时选择的动作。
-
状态转移概率的扩展: 在MDP中,下一个时刻的状态 s t + 1 s_{t+1} st+1 不仅依赖于当前状态 s t s_t st,还依赖于智能体选择的动作 a t a_t at:
p ( s t + 1 ∣ s t , a t , … , s 0 , a 0 ) = p ( s t + 1 ∣ s t , a t ) p(s_{t+1} | s_t,a_t, \ldots, s_0, a_0) =p(s_{t+1} | s_t, a_t) p(st+1∣st,at,…,s0,a0)=p(st+1∣st,at) -
马尔可夫决策过程的特点: 在MDP中,智能体的决策不仅受当前状态的影响,还受到智能体选择的动作的影响,从而更加适应需要制定决策的场景。
5. 轨迹的概率计算
-
轨迹表示: 给定策略 π ( a ∣ s ) \pi(a|s) π(a∣s),MDP的一个轨迹 τ \tau τ 表示智能体与环境交互的一系列状态、动作和奖励的序列:
τ = s 0 , a 0 , s 1 , r 1 , a 1 , … , s T − 1 , r T − 1 , a T − 1 , s T , r T , … , \tau=s_0, a_0, s_1, r_1, a_1, \ldots, s_{T-1}, r_{T-1}, a_{T-1}, s_T, r_T, \ldots, τ=s0,a0,s1,r1,a1,…,sT−1,rT−1,aT−1,sT,rT,…, -
概率计算公式:
p ( τ ) = p ( s 0 , a 0 , s 1 , r 1 , … ) p(\tau) = p(s_0, a_0, s_1, r_1, \ldots) p(τ)=p(s0,a0,s1,r1,…) p ( τ ) = p ( s 0 ) ∏ t = 0 T − 1 π ( a t ∣ s t ) p ( s t + 1 ∣ s t , a t ) p(\tau) = p(s_0) \prod_{t=0}^{T-1} \pi(a_t|s_t) p(s_{t+1}|s_t, a_t) p(τ)=p(s0)t=0∏T−1π(at∣st)p(st+1∣st,at)- p ( s 0 ) p(s_0) p(s0) 是初始状态的概率。
- π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st) 是策略:在状态 s t s_t st 下选择动作 a t a_t at 的概率。
- p ( s t + 1 ∣ s t , a t ) p(s_{t+1}|s_t, a_t) p(st+1∣st,at) 是在给定当前状态 s t s_t st 和动作 a t a_t at 的条件下,下一个时刻的状态为 s t + 1 s_{t+1} st+1 的概率(状态转移概率
)。
-
轨迹的联合概率:
- 通过对轨迹中每个时刻的概率连乘,得到整个轨迹的联合概率。
6. 给西瓜浇水问题的马尔可夫决策过程

在给西瓜浇水的马尔可夫决策过程中,只有四个状态(健康、缺水、溢水、凋亡)和两个动作(浇水、不浇水),在每一
步转移后,若状态是保持瓜苗健康则获得奖赏1 ,瓜苗缺水或溢水奖赏为- 1 , 这时通过浇水或不浇水可以恢复健康状态,当瓜苗凋亡时奖赏是最小值-100 且无法恢复。图中箭头表示状态转移,箭头旁的 a , p , r a,p,r a,p,r分别表示导致状态转移的动作、转移概率以及返回的奖赏.容易看出,最优策略在“健康”状态选择动作 “浇水”、在 “溢水”状态选择动作“不浇水”、在 “缺水”状态选择动作 “浇水”、在 “凋亡”状态可选择任意动作。
相关文章:
【深度学习】强化学习(二)马尔可夫决策过程
文章目录 一、强化学习问题1、交互的对象2、强化学习的基本要素3、策略(Policy)4、马尔可夫决策过程1. 基本元素2. 交互过程的表示3. 马尔可夫过程(Markov Process)4. 马尔可夫决策过程(MDP)5. 轨迹的概率计…...

Vue.js 使用基础知识
Vue.js 是一款用于构建用户界面的渐进式框架,它专注于视图层。Vue.js 不同于传统的 JavaScript 框架,它采用了组件化的开发方式,使得开发者可以更加高效和灵活地构建交互式的 Web 应用程序。 目录 什么是 Vue.js安装 Vue.jsVue 实例模板语法插…...

Linux---计划任务
本章主要介绍如何创建计划任务 使用 at 创建计划任务使用 crontab 创建计划任务 有时需要在某个指定的时间执行一个操作,此时就要使用计划任务了。计划任务有两种: 一个是at计划任务,另一个是 crontab计划任务。 下面我们分别来看这两种计划…...

.NET微信网页开发之通过UnionID机制解决多应用用户帐号统一问题
背景 随着公司微信相关业务场景的不断拓展,从最初的一个微信移动应用、然后发展成微信公众号应用、然后又有了微信小程序应用。但是随着应用的拓展,如何保证相同用户的微信用户在不同应用中登录的同一个账号呢?今天的主题就来了.NET微信网页…...
【docker】docker入门与安装
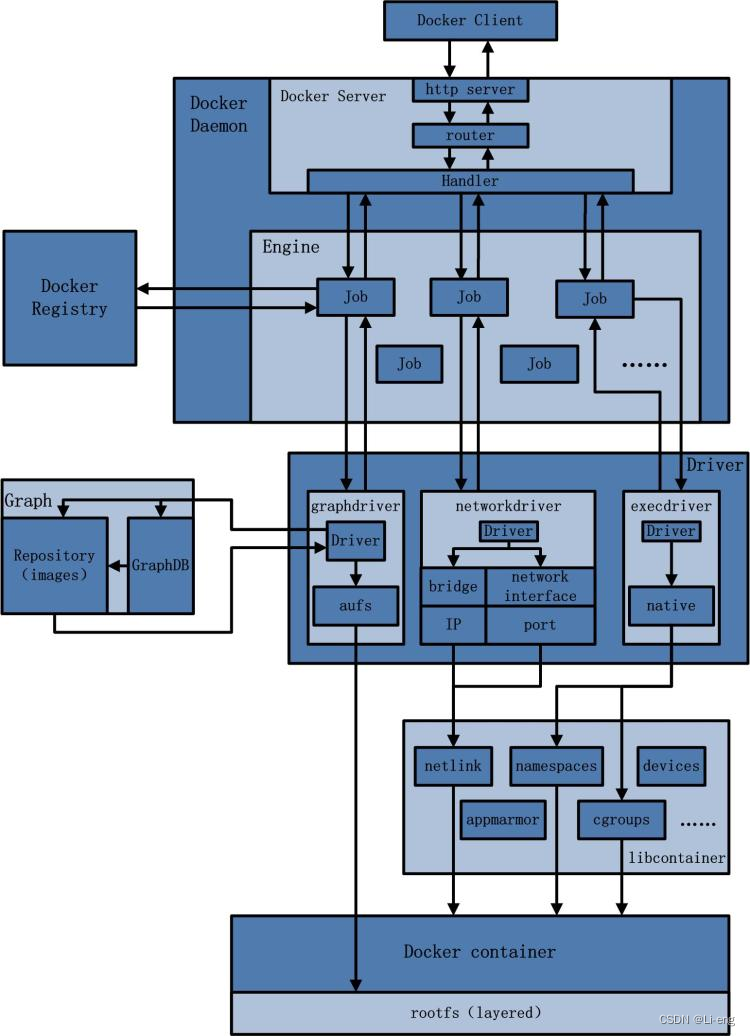
Docker 一、入门 Docker的主要目标是:Build, Ship and Run Any App, Anywhere,也就是通过对应用组件的封装、分发、部署、运行等生命周期的管理,使用户的APP及其运行环境能做到一次镜像,处处运行。 Docker运行速度快的原因 Docker有比虚拟…...
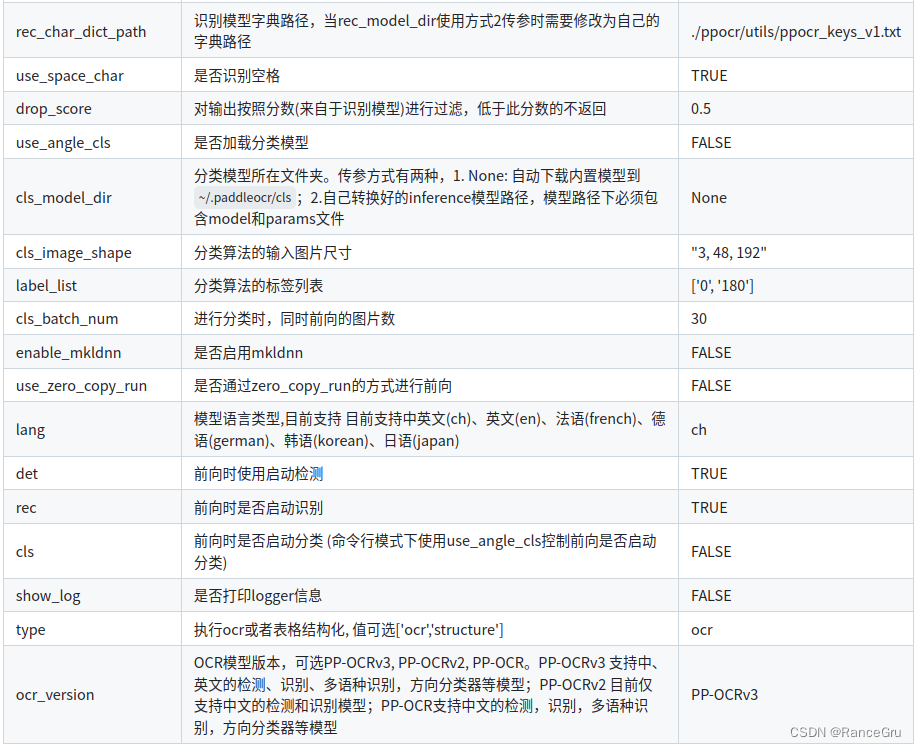
视觉学习笔记12——百度飞浆框架的PaddleOCR 安装、标注、训练以及测试
系列文章目录 虚拟环境部署 参考博客1 参考博客2 参考博客3 参考博客4 文章目录 系列文章目录一、简单介绍1.OCR介绍2.PaddleOCR介绍 二、安装1.anaconda基础环境1)anaconda的基本操作2)搭建飞浆的基础环境 2.安装paddlepaddle-gpu版本1)安装…...

深入分析ClassLocader工作机制
文章目录 一、ClassLoader简介1. 概念2. ClassLoader类结构分析 二、ClassLoader的双亲委派机制三、Class文件的加载流程1. 简介2. 加载字节码到内存3. 验证与解析4. 初始化Class对象 四、常见加载类错误分析1. ClassNotFoundException2. NoClassDefFoundError3. UnsatisfiledL…...

算法通关村第十二关—字符串转换(青铜)
一、转换成小写字母 LeetCode709.给你一个字符串s,将该字符串中的大写字母转换成相同的小写字母,返回新的字符串。 示例1: 输入:s"Hello" 输出:"hello" 示例2: 输入:s&qu…...
)
C#基础与进阶扩展合集-基础篇(持续更新)
目录 本文分两篇,进阶篇点击:C#基础与进阶扩展合集-进阶篇 一、基础入门 Ⅰ 关键字 Ⅱ 特性 Ⅲ 常见异常 Ⅳ 基础扩展 1、哈希表 2、扩展方法 3、自定义集合与索引器 4、迭代器与分部类 5、yield return 6、注册表 7、不安全代码 8、方法…...

ReactJs笔记摘录
文章目录 前言目录结构组件动态组件高阶组件 Hook函数useStateuseEffectuseContextuseReduceruseCallbackuseMemo JSX语法根元素与斜杠使用变量推荐使用className替代class属性写法三元表达式 vs &&antd和tailwindcss 组件通信父传子:props和自定义函数事件…...

2023 re:Invent使用 PartyRock 和 Amazon Bedrock 安全高效构建 AI 应用程序
前言 本篇文章授权活动官方亚马逊云科技文章转发、改写权,包括不限于在 亚马逊云科技开发者社区, 知乎,自媒体平台,第三方开发者媒体等亚马逊云科技官方渠道 “Your Data, Your AI, Your Future.(你的数据,你的AI&…...

Mac 打不开github解决方案
序言 github 时有打不开的情况,为此很是烦恼,这里分享一下如何解决这种问题,其实问题的本质是在访问github网页时无法通过github.com的二级域名进行动态域名解析。 解决方案 手动配置静态文件hosts,将该域名和IP的映射关系添加…...

十五 动手学深度学习v2计算机视觉 ——全连接神经网络FCN
文章目录 FCN FCN 全卷积网络先使用卷积神经网络抽取图像特征,然后通过卷积层将通道数变换为类别个数,最后通过转置卷积层将特征图的高和宽变换为输入图像的尺寸。 因此,模型输出与输入图像的高和宽相同,且最终输出通道包含了该空…...
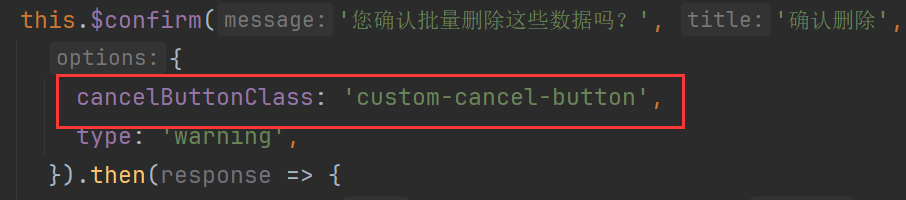
elementUI中的 “this.$confirm“ 基本用法,“this.$confirm“ 调换 “确认“、“取消“ 按钮的位置
文章目录 前言具体操作总结 前言 elementUI中的 "this.$confirm" 基本用法,"this.$confirm" 调换 "确认"、"取消" 按钮的位置 具体操作 基本用法 <script> this.$confirm(这是数据(res.data࿰…...

K8S 常用命令
获取所有的pod资源: kubectl get pod 获取所有的命名空间: kubectl get namespace 获取所有的Deployment资源: kubectl get deployment 删除指定的deploy: kubectl delete deploy nginx 获取所有的服务: kubectl get serv…...

12.使用 Redis 优化登陆模块
目录 1. 使用 Redis 优化登陆模块 1.1 使用 Redis 存储验证码 1.2 使用 Redis 存储登录凭证 1.3 使用 Redis 缓存用户信息 1. 使用 Redis 优化登陆模块 使用 Redis 存储验证码:验证码需要频繁的访问与刷新,对性能要求较高;验证码不需要永…...
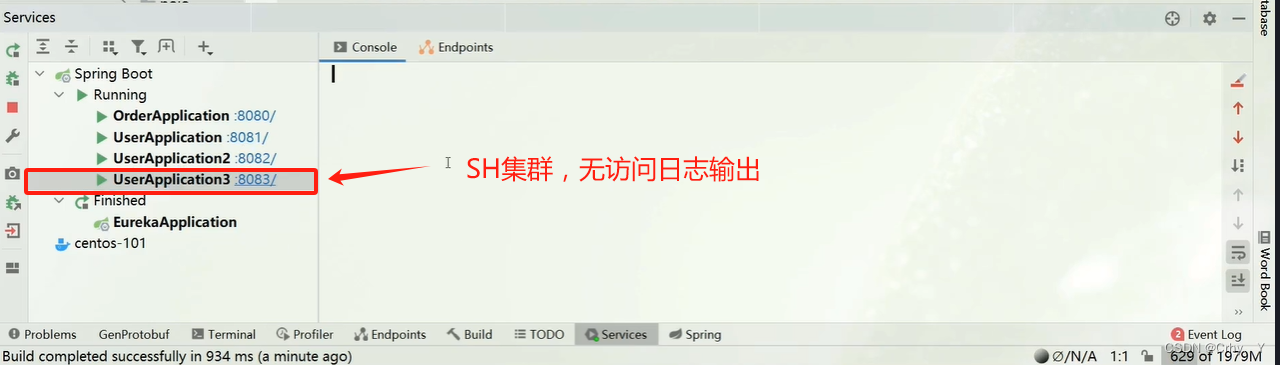
Nacos-NacosRule 负载均衡—设置集群使本地服务优先访问
userservice: ribbon: NFLoadBalancerRuleClassName: com.alibaba.cloud.nacos.ribbon.NacosRule # 负载均衡规则 NacosRule 权重计算方法 目录 一、介绍 二、示例(案例截图) 三、总结 一、介绍 NacosRule是AlibabaNacos自己实现的一个负载均衡策略&…...

软件设计师——信息安全(二)
📑前言 本文主要是【信息安全】——软件设计师——信息安全的文章,如果有什么需要改进的地方还请大佬指出⛺️ 🎬作者简介:大家好,我是听风与他🥇 ☁️博客首页:CSDN主页听风与他 🌄…...
Unity中实现ShaderToy卡通火(原理实现篇)
文章目录 前言一、我们在片元着色器中,实现卡通火的大体框架1、使用 noise 和 _CUTOFF 判断作为显示火焰的区域2、_CUTOFF : 用于裁剪噪波范围的三角形3、noise getNoise(uv, t); : 噪波函数 二、顺着大体框架依次解析具体实现的功能1、 uv.x * 4.0; : …...
引迈信息-JNPF平台怎么样?值得入手吗?
目录 1.前言 2.引迈低代码怎么样? 3.平台亮点展示 4.引迈产品特点 5.引迈产品技术栈: 1.前言 低代码是近几年比较火的一种应用程序快速开发方式,它能帮助用户在开发软件的过程中大幅减少手工编码量,并通过可视化组件加速应用…...

【职场】职场上,从不发脾气的人,最值得警惕
职场上,从不发脾气的人,最值得警惕“真正危险的人,从来不是那个拍桌子的人。而是那个,永远在微笑的人。”一、你身边有没有这种人 开会的时候,无论发生什么,他都面带微笑。 被否定了,点头&#…...

HoYo.Gacha终极指南:如何轻松管理你的米哈游抽卡记录
HoYo.Gacha终极指南:如何轻松管理你的米哈游抽卡记录 【免费下载链接】HoYo.Gacha ✨ 一个非官方的工具,用于管理和分析你的 miHoYo 抽卡记录。(原神 | 崩坏:星穹铁道 | 绝区零)An unofficial tool for managing and a…...

AI文档智能审查:从NLP原理到企业级部署实战
1. 项目概述:文档的“哨兵”与智能守护者在信息爆炸的时代,我们每天都要与海量的文档打交道——从一份关键的商业合同、一份严谨的学术论文,到一份复杂的项目需求说明书。这些文档不仅是信息的载体,更是决策的依据、合作的基石。然…...

AI Coding如何落地APP开发——从个人玩具到公司级降本增效
一、AI 编程能力如何应用到APP开发团队 每天打开新闻都是各种: AI可以取代程序猿、AI可以独立写页面、AI可以独立完成APP,程序员马上要失业了,一个产品经理半天时间就能生成一个带完整页面的活动模块原型;一个运营人员一个小时就…...

别再傻傻分不清!5分钟搞懂NMOS和PMOS,从符号到选型一次讲透
5分钟掌握NMOS与PMOS实战技巧:从符号识别到精准选型 1. 初识MOS管:电子世界的交通警察 想象一下,你正面对一堆外形相似的MOS管,就像站在十字路口的交警,需要迅速判断每辆车的行驶方向。NMOS和PMOS正是电子电路中的&quo…...

GenAIScript:用脚本化AI工作流提升代码生成效率与工程化实践
1. 项目概述:当AI遇上代码生成,GenAIScript带来了什么?如果你最近在关注AI如何改变开发工作流,特别是微软在AI领域的动作,那么microsoft/genaiscript这个项目绝对值得你花时间深入研究。这不仅仅是一个简单的代码生成工…...

BilibiliDown:一键下载B站音频的跨平台神器
BilibiliDown:一键下载B站音频的跨平台神器 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/bi/Bilibili…...

回溯52-59
52. 全排列 给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 class Solution(object):def fun(self,nums,path):if len(path)len(nums):self.res.append(path[:])for i in range(len(nums)):if self.visit[i]0:self.vi…...

赛博朋克风格商业变现闭环:从DALL·E对比测试到Fiverr接单模板,7天打造高单价AI艺术IP
更多请点击: https://intelliparadigm.com 第一章:赛博朋克视觉语法与AI艺术IP的神经接口 赛博朋克视觉语法并非仅关乎霓虹、雨巷与义体——它是一套高度结构化的符号系统,其色彩模型(如青紫-品红双主调)、构图逻辑&a…...

开源GA数据代理:安全高效获取Google Analytics数据的工程实践
1. 项目概述:一个开源的Google Analytics数据代理 如果你正在开发一个需要接入Google Analytics(GA)数据的应用,无论是内部的数据看板、营销分析工具,还是客户报告系统,你大概率都遇到过同一个难题&#x…...