ROS机器人入门
http://www.autolabor.com.cn/book/ROSTutorials/
1、ROS简介
ROS 是一个适用于机器人的开源的元操作系统。其实它并不是一个真正的操作系统,其
底层的任务调度、编译、寻址等任务还是由 Linux 操作系统完成,也就是说 ROS 实际上是运
行在 Linux 上的次级操作系统。但是 ROS 提供了操作系统应用的各种服务(如:硬件抽象、
底层设备控制、常用函数实现、进程间消息传递、软件包管理等),也提供了用于获取、编
译、跨平台运行代码的工具和函数。 ROS 主要采用松耦合点对点进程网络通信,目前主要还
是支持 Ubuntu 系统, windows 和 Mac OS 目前支持的还不好,所以推荐在 Ubuntu 系统上安
装使用 ROS。
ROS是一套机器人通用软件框架,可以提升功能模块的复用性。
设计思想、核心概念、核心模块、核心工具:
ROS 的设计思路主要是分布式架构,将机器人的功能和软件做成一个个节点,然后每个
节点通过 topic 进行沟通,这些节点可以部署在同一台机器上,也可以部署在不同机器上,
还可以部署在互联网上。
ROS 的核心概念主要是节点和用于节点间通信的话题与服务。管理器 Master 管理节点
与话题之间通信的过程,并且还提供一个参数服务用于全局参数的配置。 ROS 通过功能包集
stack 和功能包 package 来组织代码。
ROS 的核心模块包括:通信结构基础、机器人特性功能、工具集。通信结构基础主要是
消息传递、记录回放消息、远程过程调用、分布式参数系统;机器人特性功能主要是标准机
器人消息、机器人几何库、机器人描述语言、抢占式远程过程调用、诊断、位置估计、定位
导航;工具集主要是命令式工具、可视化工具、图形化接口。
ROS 核心工具很丰富, ROS 常用命令工具是 rostopic、 rosservice、 rosnode、 rosparam、
rosmsg、 rossrv、 roswtf; ROS 常用可视化工具是 rqt、 rviz; ROS 用于存储与回放数据的
工具 rosbag; ROS 的 log 系统记录软件运行的相关信息; ROS 还拥有强大的第三方工具支持:
三维仿真环境 Gazebo、计算机视觉库 OpenCV、点云库 PCL、机械臂控制库 MoveIt、工业应
用库 Industrial、机器人编程工具箱 MRPT、实时控制库 Orocos。
ROS可以通过自身携带的主板汇总信息给远程PC,由远程PC担任数据处理任务,最后返回结果给主板处理;
ROS设计目标:
代码复用:支持机器人技术研发中的代码重用
分布式:ROS是进程的分布式框架,ROS中的进程可分布于不同的主机,不同主机协同工作,从而分散计算压力。
松耦合:ROS的功能模块封装于独立的功能包或元功能包,便于分享,功能包内的模块以节点位单位运行,以ros标准的IO作为接口,开发者不需要关注模块内部的实现,只要了解接口规则就能实现复用,实现了模块间点对点的松耦合连接;
精简:为ROS编写的代码可以与其他机器人软件框架一起使用,ROS易于与其他机器人软件框架集成:ROS已与OpenRAVE,Orocos和Player集成
语言独立性:java,cpp,Python等,为了支持更多的应用开发和一致,ros设计为一种语言弱相关的框架结构;允许消息接口的嵌套使用
易于测试:ROS具有称为rostest的内置单元/集成测试框架,可以轻松安装和拆卸测试工具
大型应用:ROS适用于大型运行时系统和大型开发流程
丰富的组件化工具包:ROS可采用组件化方式集成一些工具和软件到系统中并作为一个组件直接使用;
免费且开源:开发者多,功能包多。
ROS安装:详见本文头的链接;
配置ros环境变量:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
测试ros代码:

使用记事本编写ros程序:
创建工作空间并初始化:
mkdir -p 名称/src
cd 名称
catkin_make

进入src创建ros包并添加依赖:
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs

helloworld:
1\进入 ros 包添加 scripts 目录并编辑 python 文件
cd ros包
mkdir scripts
2\新建 python 文件: (文件名自定义)
#! /usr/bin/env python
"""
Python 版 HelloWorld
"""
import rospy
if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World!!!!")
3\为 python 文件添加可执行权限
chmod +x 自定义文件名.py
4\编辑 ros 包下的 CamkeList.txt 文件
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
5\进入工作空间目录并编译
cd 自定义空间名称
catkin_make
6.进入工作空间目录并执行
先启动命令行1:
roscore
再启动命令行2:
cd 工作空间
source ./devel/setup.bash
rosrun 包名 自定义文件名.py
相关文章:
ROS机器人入门
http://www.autolabor.com.cn/book/ROSTutorials/ 1、ROS简介 ROS 是一个适用于机器人的开源的元操作系统。其实它并不是一个真正的操作系统,其 底层的任务调度、编译、寻址等任务还是由 Linux 操作系统完成,也就是说 ROS 实际上是运 行在 Linux 上的次级…...
30. 深度学习进阶 - 池化
Hi,你好。我是茶桁。 上一节课,我们详细的学习了卷积的原理,在这个过程中给大家讲了一个比较重要的概念,叫做input channel,和output channel。 当然现在不需要直接去实现, 卷积的原理PyTorch、或者TensorFlow什么的…...

工业应用新典范,飞凌嵌入式FET-D9360-C核心板发布!
来源:飞凌嵌入式官网 当前新一轮科技革命和产业变革突飞猛进,工业领域对高性能、高可靠性、高稳定性的计算需求也在日益增长。为了更好地满足这一需求,飞凌嵌入式与芯驰科技(SemiDrive)强强联合,基于芯驰D9…...
Webrtc 学习交流
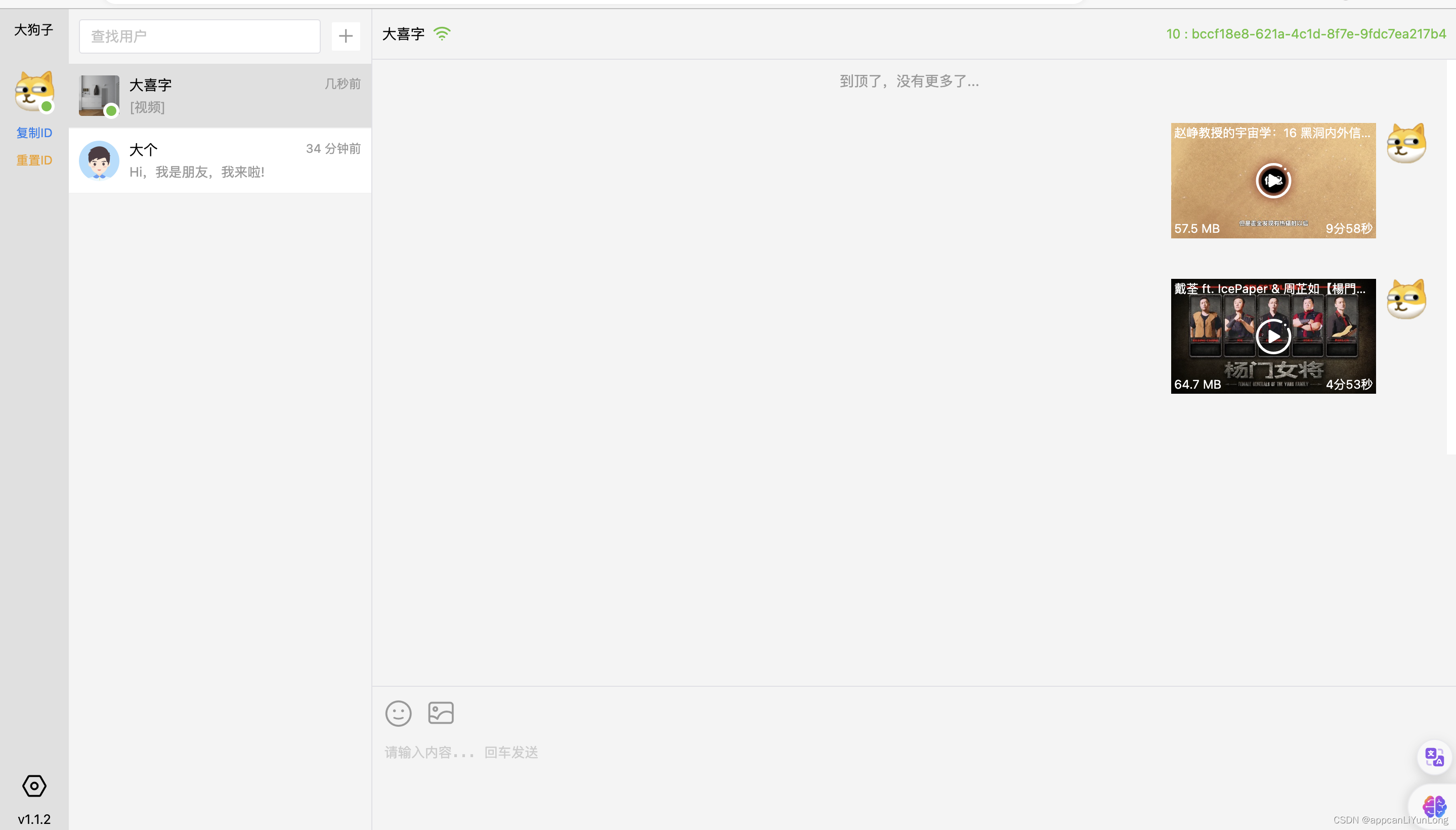
花了几周的时间研究了一下webrtc ,并开发了一个小项目,用来点对点私密聊天 交流传输文件等…后续会继续扩展其功能。 体验地址,大狗子的ID,我在线时可以连接测试到我 f3e0d6d0-cfd7-44a4-b333-e82c821cd927 项目特点 除了交换信令与stun 没…...
华为云之轻松搭建 Nginx 静态网站
华为云之轻松搭建 Nginx 静态网站 一、本次实践介绍1. 本次实践目的2. 本次实践环境 二、ECS弹性云服务器介绍三、准备实践环境1. 预置环境2. 查看ECS服务器的账号密码信息3. 登录华为云4. 远程登录ECS服务器 四、安装配置 Nginx1. 安装nginx2. 启动nginx3. 浏览器中访问nginx服…...

【pytorch】图像运行过程中,保证梯度情况下变换
部分操作是危险的,会中断梯度流。 self.patch_transformer(adv_patch, lab_batch, img_size, do_rotateTrue, rand_locFalse)p_img_batch self.patch_applier(img_batch, adv_batch_t) # torch.Size([56, 3, 329, 416])可行危险操作 torch.clamp(adv_batch, 0…...
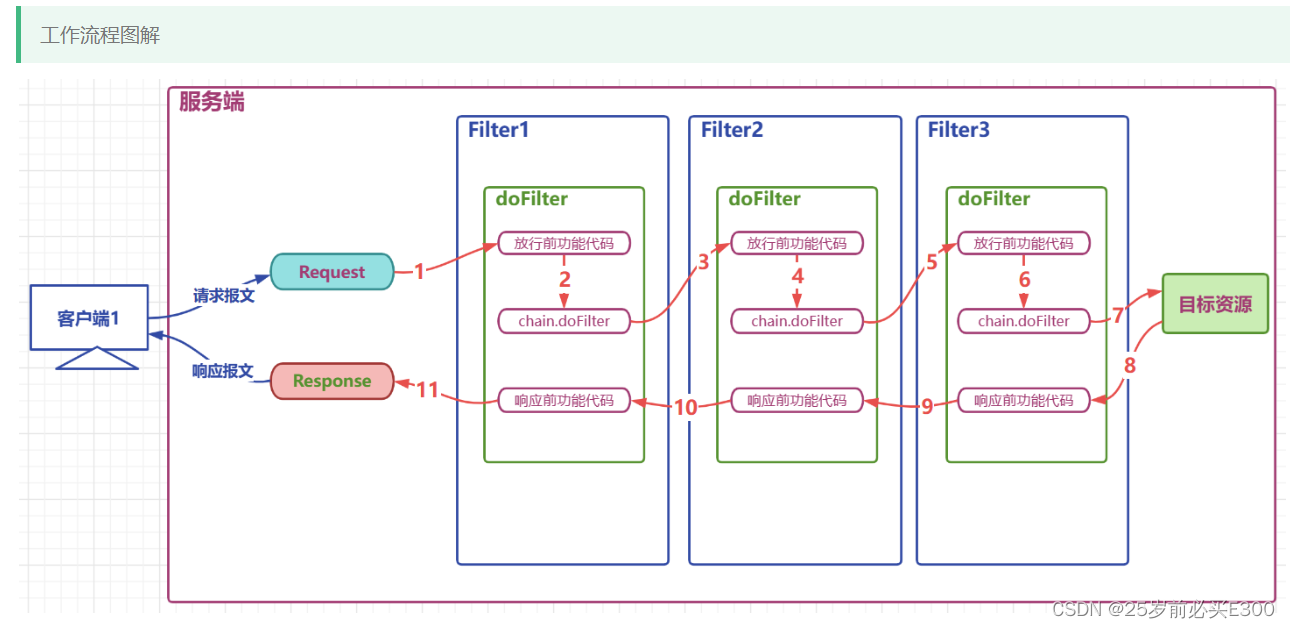
学习Java第70天,过滤器Filter简介
过滤器概述 Filter,即过滤器,是JAVAEE技术规范之一,作用目标资源的请求进行过滤的一套技术规范,是Java Web项目中最为实用的技术之一 Filter接口定义了过滤器的开发规范,所有的过滤器都要实现该接口 Filter的工作位置是项目中所有目标资源之前,容器在创建HttpServletRequest和…...
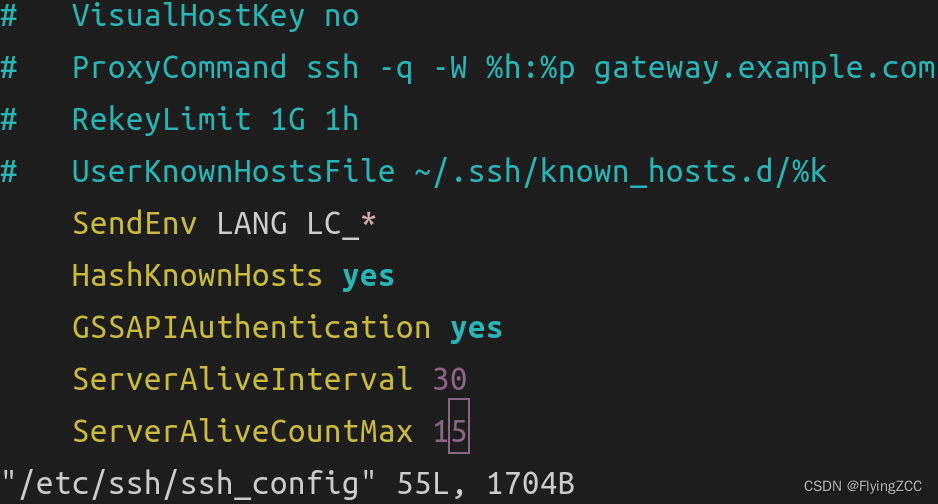
Ubuntu Desktop 22.04 设置 ssh 超时时间
Ubuntu Desktop 22.04 使用 ssh 连接服务器时,发现一段时间不操作就会自动断开连接,解决方法如下: 打开 /etc/ssh/ssh_config 文件: sudo vim /etc/ssh/ssh_config在文件最后添加: # ssh 客户端会每隔 30 秒发送一个…...

【微服务】Spring Aop原理深入解析
目录 一、前言 二、aop概述 2.1 什么是AOP 2.2 AOP中的一些概念 2.2.1 aop通知类型 2.3 AOP实现原理 2.3.1 aop中的代理实现 2.4 静态代理与动态代理 2.4.1 静态代理实现 三、 jdk动态代理与cglib代理 3.1 jdk动态代理 3.1.1 jdk代理示例 3.1.2 jdk动态代理模拟实现…...

Spring Boot JSON中文文档
本文为官方文档直译版本。原文链接 Spring Boot JSON中文文档 引言Jackson自定义序列化器和反序列化器混入 GsonJSON-B 引言 Spring Boot 提供与三个 JSON 映射库的集成: GsonJacksonJSON-B Jackson 是首选的默认库。 Jackson Spring-boot-starter-json 提供了…...
)
Flink系列之:State Time-To-Live (TTL)
Flink系列之:State Time-To-Live TTL 一、TTL二、TTL实现代码三、过期状态的清理 一、TTL Flink的TTL(Time-To-Live)是一种数据过期策略,用于指定数据在流处理中的存活时间。TTL可以应用于Flink中的状态或事件时间窗口࿰…...

数据结构(Chapter Two -01)—线性表及顺序表
2.1 线性表 线性表是具有相同数据类型的n个数据元素的有限序列。第一个元素为表头元素,最后一个元素为表尾元素。除第一个元素,每个元素有且仅有一个直接前驱。除最后一个元素,每个元素都仅有一个直接后继。 其中线性表包括以下(…...

【刷题笔记1】
笔记1 string s;while(cin>>s);cout<<s.length()<<endl;输入为hello nowcoder时,输出为8 (nowcoder的长度) 2.字符串的输入(有空格) string a;getline(cin, a);cout<<a<<endl;输入为ABCabc a 输出为ABCabc a …...

视频数据卡设计方案:120-基于PCIe的视频数据卡
一、产品概述 基于PCIe的一款视频数据收发卡,并通过PCIe传输到存储计算服务器,实现信号的采集、分析、模拟输出,存储。 产品固化FPGA逻辑,实现PCIe的连续采集,单次采集容量2GB,开源的PCIe QT客…...
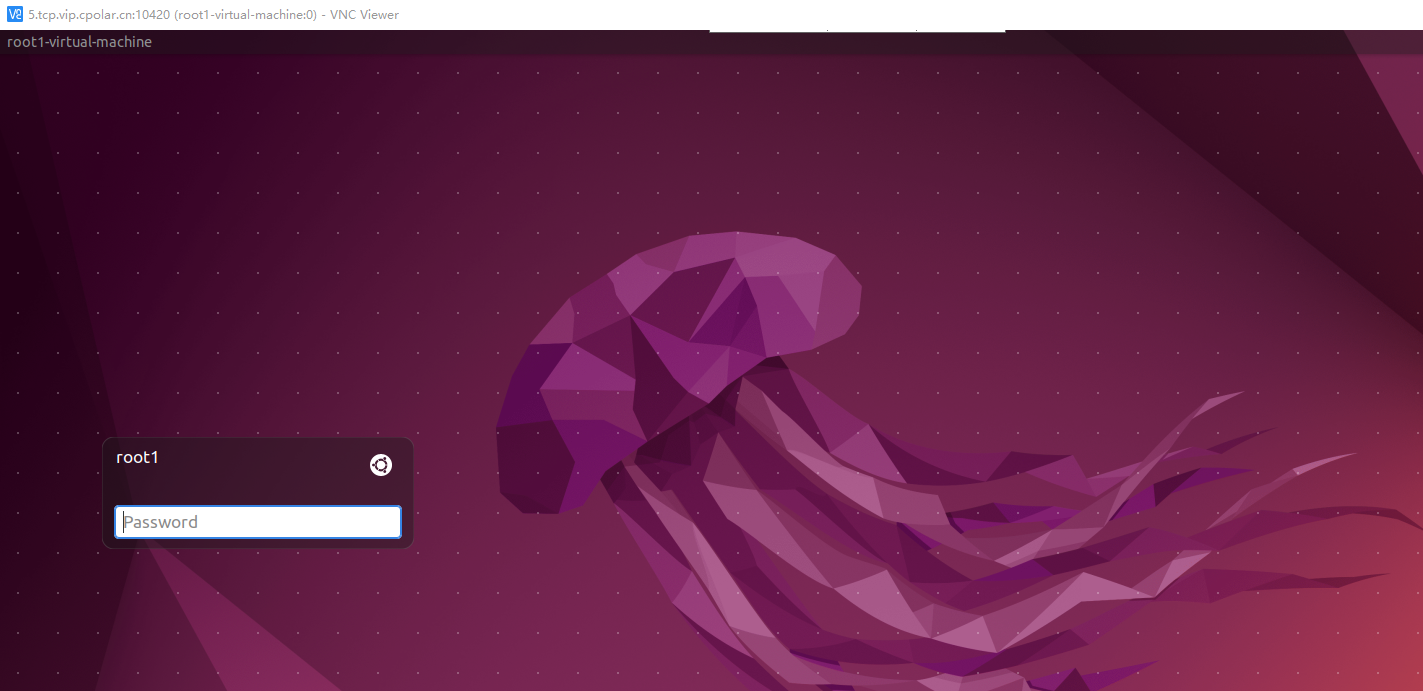
Windows使用VNC Viewer远程桌面Ubuntu【内网穿透】
文章目录 前言1. ubuntu安装VNC2. 设置vnc开机启动3. windows 安装VNC viewer连接工具4. 内网穿透4.1 安装cpolar【支持使用一键脚本命令安装】4.2 创建隧道映射4.3 测试公网远程访问 5. 配置固定TCP地址5.1 保留一个固定的公网TCP端口地址5.2 配置固定公网TCP端口地址5.3 测试…...
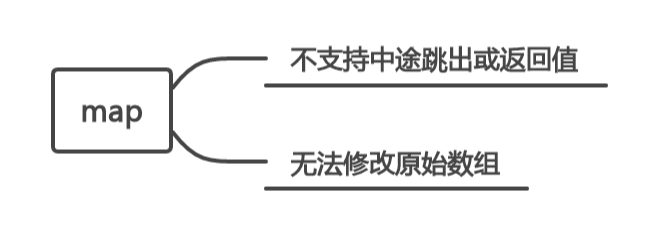
javascript 数组处理的两个利器: `forEach` 和 `map`(上)
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
【C语言】SCU安全项目1-FindKeys
目录 前言 命令行参数 16进制转字符串 extract_message1 process_keys12 extract_message2 main process_keys34 前言 因为这个学期基本都在搞CTF的web方向,C语言不免荒废。所幸还会一点指针相关的知识,故第一个安全项目做的挺顺利的,…...

IDA pro软件 如何修改.exe小程序打开对话框显示的文字?
环境: Win10 专业版 IDA pro Version 7.5.201028 .exe小程序 问题描述: IDA pro软件 如何修改.exe小程序打开对话框显示的文字? 解决方案: 一、在IDA Python脚本中编写代码来修改.rdata段中的静态字符串可以使用以下示例代码作为起点(未成功) import idc# 定义要修…...
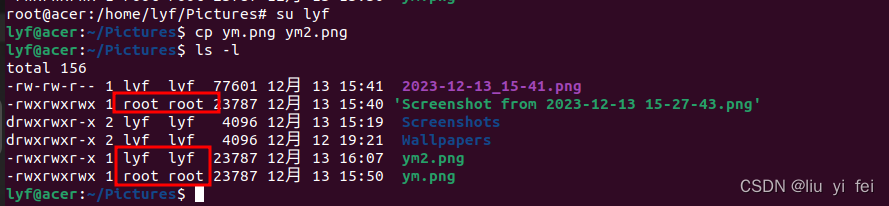
Ubuntu22.04切换用户
一、只有一个用户时没有切换用户菜单项 1、用户信息 cat /etc/passwd 2、系统菜单 二、添加用户 添加新用户ym,全名yang mi 三、有两个及以上的用户时出现切换用户菜单项 1、用户信息 cat /etc/passwd 2、系统菜单 四、切换用户 1、点击上图中Switch User …...

torch.gather(...)
1. Abstract 对于 pytorch 中的函数 torch.gather(input, # (Tensor) the source tensordim, # (int) the axis along which to indexindex, # (LongTensor) the indices of elements to gather*,sparse_gradFalse,outNone ) → Tensor有点绕,很多博客画各…...

同花顺高级玩法:用Python自动计算并更新‘历史换手衰减系数’,解放双手
同花顺量化实战:Python自动化计算历史换手衰减系数的完整方案 在量化交易领域,筹码分布分析一直是技术派投资者的重要工具。而同花顺软件中的"历史换手衰减系数"参数设置,直接影响着筹码峰分析的准确性。传统的手工计算方式不仅效率…...

基于WPF开发桌面AI助手:架构设计与实现详解
1. 项目概述:一个开源的WPF桌面AI助手 最近在GitHub上看到一个挺有意思的项目,叫“MayDay-wpf/AIBotPublic”。光看名字,可能有点摸不着头脑,但点进去研究一下,你会发现这其实是一个用WPF(Windows Present…...

从零到一:在个人PC上部署并集成ChatGLM-6B到Unity应用
1. 环境准备与模型下载 在个人PC上部署ChatGLM-6B需要先搞定三件事:硬件检查、软件环境搭建和模型文件获取。我的老款游戏本(i7-9750H RTX2060 6GB显存)实测可以流畅运行,关键在于正确的量化配置。 硬件检查要点: 显存…...

终极指南:3步掌握yfinance金融数据获取与智能修复实战
终极指南:3步掌握yfinance金融数据获取与智能修复实战 【免费下载链接】yfinance Download market data from Yahoo! Finances API 项目地址: https://gitcode.com/GitHub_Trending/yf/yfinance yfinance是一个强大的Python库,能够从Yahoo! Finan…...
)
用51单片机和HC-SR04超声波模块DIY一个倒车雷达(附完整代码和立创EDA原理图)
51单片机与HC-SR04超声波模块实战:打造高精度倒车雷达系统 在汽车电子和智能硬件领域,倒车雷达作为基础安全装置,其DIY实现不仅能帮助理解超声波测距原理,更是掌握嵌入式系统开发的绝佳实践。本文将手把手教你使用经典的STC89C52单…...

如何让Photoshop图层批量导出速度提升3倍?这个开源脚本做到了!
如何让Photoshop图层批量导出速度提升3倍?这个开源脚本做到了! 【免费下载链接】Photoshop-Export-Layers-to-Files-Fast This script allows you to export your layers as individual files at a speed much faster than the built-in script from Ado…...

从单体智能到组织智能:AgentOrg多智能体系统架构与实战
1. 项目概述:从单体智能到组织智能的范式跃迁最近在AI Agent领域,一个名为“AgentOrg”的开源项目引起了我的注意。这个由Angelopvtac发起的项目,其核心思想非常吸引人:它不再将AI Agent视为一个孤立的、执行单一任务的智能体&…...

[具身智能-766]:机器人在运动过程中需要实时定位,AMCL 每一次都需要全局撒粒子重搜吗?还是一旦定位后,后续的移动过程中,只需要局部匹配?
直白结论完全不需要每次全局撒粒子重搜定位成功稳定后,机器人全程只做局部小范围匹配,只有丢位置、被挪动时,才会重新全局撒粒子搜索。一、分两种状态1. 正常行走(已定位成功)粒子只聚集在机器人真实位置周边很小一片区…...

AI驱动命令行工具:用自然语言生成Shell命令,提升开发运维效率
1. 项目概述:一个能“读懂”你意图的智能命令行工具如果你和我一样,每天有大量时间泡在终端里,那么对命令行工具的效率追求几乎是永无止境的。敲命令、查参数、记路径、处理错误……这些琐碎的操作虽然基础,却实实在在地消耗着我们…...

【模拟电路】Circuit JS:从零到一,构建你的首个交互式电路实验
1. 初识Circuit JS:你的虚拟电路实验室 第一次接触Circuit JS时,我正为一个简单的LED电路设计发愁。传统仿真软件要么安装复杂,要么收费昂贵,直到发现这个直接在浏览器里运行的免费工具。打开网页的瞬间,就像走进了中学…...