[Toolschain cpp ros cmakelist python vscode] 记录写每次项目重复的设置和配置 不断更新
写在前面
用以前的设置,快速配置项目,以防长久不用忘记,部分资料在资源文件里还没有整理
outline
- cmakelist 复用
- vscode 找到头文件
- vscode debug
- 现有代码直接关联远端git
- ros杂记
- repo 杂记
- glog杂记
cmakelist 复用
包含了根据系统路径找库,debug,主动set库路径,单元测试用,和常用的加入头文件与源文件
cmake_minimum_required(VERSION 3.14.1)
project(project_osqp)
set( CMAKE_CXX_STANDARD 11 )
set( CMAKE_CXX_STANDARD_REQUIRED ON )
set( THREADS_PREFER_PTHREAD_FLAG ON )function(include_sub_directories_recursively root_dir)if (IS_DIRECTORY ${root_dir})include_directories(${root_dir})file(GLOB children RELATIVE ${root_dir} ${root_dir}/*)foreach(child ${children})if (IS_DIRECTORY ${root_dir}/${child})include_sub_directories_recursively(${root_dir}/${child})endif()endforeach()endif()
endfunction()function(aux_source_directory_recursively root_dir var_name)if(IS_DIRECTORY ${root_dir})aux_source_directory(${root_dir} TMP_SRC_LIST)set(${var_name} ${${var_name}} ${TMP_SRC_LIST} PARENT_SCOPE)file(GLOB children RELATIVE ${root_dir} ${root_dir}/*)foreach(child ${children})if(IS_DIRECTORY ${root_dir}/${child})aux_source_directory_recursively(${root_dir}/${child} ${var_name}) endif()endforeach()endif()
endfunction()find_package(Threads REQUIRED )
find_package(glog REQUIRED)
find_package(Eigen3 REQUIRED)set(GLOG_LIBRARIES "/usr/local/lib/libglog.so")message(STATUS "GLOG_INCLUDE_DIRS: ${GLOG_INCLUDE_DIRS}")
message(STATUS "GLOG_LIBRARIES: ${GLOG_LIBRARIES}")
message(STATUS "EIGEN3_INCLUDE_DIR: ${EIGEN3_INCLUDE_DIR}")set(CMAKE_BUILD_TYPE "Debug")
set(CMAKE_INCLUDE_CURRENT_DIR ON)# aux_source_directory(${CMAKE_CURRENT_SOURCE_DIR} SRC_LIST)aux_source_directory(${CMAKE_CURRENT_SOURCE_DIR}/src/. SRC_LIST)#aux_source_directory_recursively(${CMAKE_CURRENT_SOURCE_DIR}/src SRC_LIST)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/include)
include_sub_directories_recursively(${CMAKE_CURRENT_SOURCE_DIR}/src)##############################debug start##############################
get_property(include_dirs DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR} PROPERTY INCLUDE_DIRECTORIES)foreach(dir ${include_dirs})message("Include directory: ${dir}")
endforeach()message("Source files:")
foreach(file IN LISTS SRC_LIST)message(" ${file}")
endforeach()
#################################debug end####################################include_directories(${EIGEN3_INCLUDE_DIR})
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/libs)
add_executable(${PROJECT_NAME} ${SRC_LIST})
#add_library(${PROJECT_NAME} STATIC ${SRC_LIST}) # temp use
target_include_directories(${PROJECT_NAME} PRIVATE ${GLOG_INCLUDE_DIRS})
target_link_libraries(${PROJECT_NAME} ${GLOG_LIBRARIES})
target_link_libraries(${PROJECT_NAME} ${EIGEN3_LIBRARIES})
target_link_libraries(${PROJECT_NAME} ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cpp/libyaml-cpp.a)#####################################unit test ###################################
# add_executable(unit_test_pathFW ${SRC_LIST})
# target_link_libraries( unit_test_pathFW
# ${GLOG_LIBRARIES}
# # ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cpp/libyaml-cpp.a
# ${CMAKE_CURRENT_SOURCE_DIR}/libs/yaml-cpp/libyaml-cpp.a
# # yaml-cpp
# )
#####################################unit test end#################################
备注:target_include_directories 用于为特定目标设置包含目录,而 include_directories 用于设置项目中所有目标的全局包含目录
vscode 找头文件
之前使用visual studio 感觉在这一点上 更方便,如果vscode 要配置一下 。
新建:c_cpp_properties.json 或者 ctrl +shift+ p在设置中查找 configuration (json),但也可以ui方式直接设置
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": false
},
"includePath": [
"/home/kaifengqu/Desktop/H06CodeinROSEnv/devel/include/**",
"/opt/ros/noetic/include/**",
"/home/kaifengqu/Desktop/H06CodeinROSEnv/src/**",
"/usr/include/**"
],
"name": "ROS",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "c++14"
}
],
"version": 4
}
vscode debug
{// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(gdb) 启动","type": "cppdbg","request": "launch","program": "${workspaceFolder}/build_t/project_MPtest
","args": [],"stopAtEntry": false,"cwd": "${fileDirname}","environment": [],"externalConsole": false,"MIMode": "gdb","setupCommands": [{"description": "为 gdb 启用整齐打印","text": "-enable-pretty-printing","ignoreFailures": true},{"description": "将反汇编风格设置为 Intel","text": "-gdb-set disassembly-flavor intel","ignoreFailures": true}]}]
}
# 使用ros的方式
1 Vscode 安装ros插件 还是需要添加一下launch配置{// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "ROS: Attach","type": "ros","request": "attach"}]
}
2设置断点,运行节点,回放数据
3使用调试与运行中 ROS Attach 查找ID 或进程名称,将可执行文件(NODE)附加到进程里。如果不是用ros(有一个问题无法暂停数据的播放)也要配置debuggdb
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) 启动",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/project_PPconrtoller",
"args": [],
"stopAtEntry": false,
"cwd": "${fileDirname}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "为 gdb 启用整齐打印",
"text": "-enable-pretty-printing",
"ignoreFailures": true
},
{
"description": "将反汇编风格设置为 Intel",
"text": "-gdb-set disassembly-flavor intel",
"ignoreFailures": true
}
]
}]
}
现有代码直接关联远端git
echo "# Scripts" >> README.md
git init
git add README.md
git commit -m "first commit"
git branch -M main
git remote add origin git@github.com:HerrQQ/Scripts.git
git push -u origin main
ros 杂记
脚本更改
rosrun pilot_controller modifyForRos.py
分析工具rosrun plotjuggler plotjuggler
记录
rosbag record -O recorded_data -a
启动节点
roslaunch pilot_controller pilot_controller_ha1.launch 找节点关闭
pidof program_name pkill -f feishu回放
rqt_bag编译
catkin_make -j4 -DCMAKE_BUILD_TYPE=Debugplotjuggler缺东西问题
使用sudo apt install ros-noetic-plotjuggler-ros一键安装plotjuggler及其ros插件
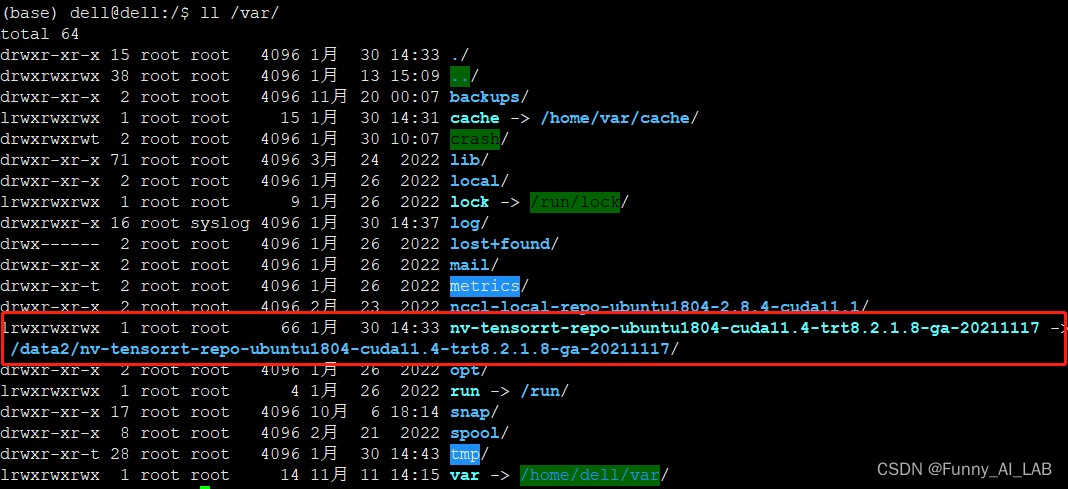
repo 杂记
https://blog.csdn.net/weixin_48120109/article/details/128272613 讲解repo具体用法
https://blog.csdn.net/KIK9973/article/details/118755045 haoyong nice to use
1. 初始化: 使用 repo init 命令初始化 repo,在后面添加 -u 参数,并指明源的 URL。例如:
repo init -u https://android.googlesource.com/platform/manifest
可以添加 -b 参数来切换到不同的分支,比如 -b android-4.0.1_r1。
同步: 使用 repo sync 命令将所有相关的 git 仓库同步到本地。可以添加 仓库名 参数来单独同步某一个仓库,否则默认同步全部。例如:
repo sync
同步特定仓库:
repo sync project_name
查看状态:使用 repo status 命令来查看所有 git 仓库的状态。
开始工作: 在开始对任何仓库做出修改之前,建议先使用 repo start 创建一个新的分支:
repo start my_branch my_project
1. 提交: 分别在每个 git 仓库中添加和提交更改,然后使用 repo upload 上传更改。
更多关于 repo 使用的命令和详细说明,可以通过在控制台输入 repo -h 查看。
Glog杂记
google::InitGoogleLogging(argv[0]);
google::SetStderrLogging(google::GLOG_ERROR);
FLAGS_colorlogtostderr = true;FLAGS_logtostderr = false; // 将日志输出到日志文件FLAGS_minloglevel = 2; // 设置最小日志级别为 ERRORFLAGS_log_dir = "/path/to/logs"; // 设置日志文件的输出目录
相关文章:
[Toolschain cpp ros cmakelist python vscode] 记录写每次项目重复的设置和配置 不断更新
写在前面 用以前的设置,快速配置项目,以防长久不用忘记,部分资料在资源文件里还没有整理 outline cmakelist 复用vscode 找到头文件vscode debug现有代码直接关联远端gitros杂记repo 杂记glog杂记 cmakelist 复用 包含了根据系统路径找库…...
【每日OJ—有效的括号(栈)】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言 1、有效的括号题目: 1.1方法讲解: 1.2代码实现: 总结 前言 世上有两种耀眼的光芒,一种是正在升起的太阳&#…...

.gitignore和git lfs学习
The ninth day——12.18 1. .gitignore 忽略规则优先级 从命令行中读取可用的忽略规则当前目录定义的规则父级目录定义的规则,依次递推$GIT_DIR/info/exclude 文件中定义的规则core.excludesfile中定义的全局规则 忽略规则匹配语法 空格不匹配任意文件ÿ…...

2023-12-18 C语言实现一个最简陋的B-Tree
点击 <C 语言编程核心突破> 快速C语言入门 C语言实现一个最简陋的B-Tree 前言要解决问题:想到的思路:其它的补充: 一、C语言B-Tree基本架构: 二、可视化总结 前言 要解决问题: 实现一个最简陋的B-Tree, 研究B-Tree的性质. 对于B树, 我是心向往之, 因为他是数据库的基…...
vite与webpack?
vite对比react-areate-app 1、构建速度 2、打包速度 3、打包文件体积...
算法和冲突驱动子句学习)
距离矩阵路径优化Python Dijkstra(迪杰斯特拉)算法和冲突驱动子句学习
Dijkstra算法 Dijkstra 算法是一种流行的寻路算法,通常用于基于图的问题,例如在地图上查找两个城市之间的最短路径、确定送货卡车可能采取的最短路径,甚至创建游戏地图。其背后的直觉基于以下原则:从起始顶点访问所有相邻顶点&am…...
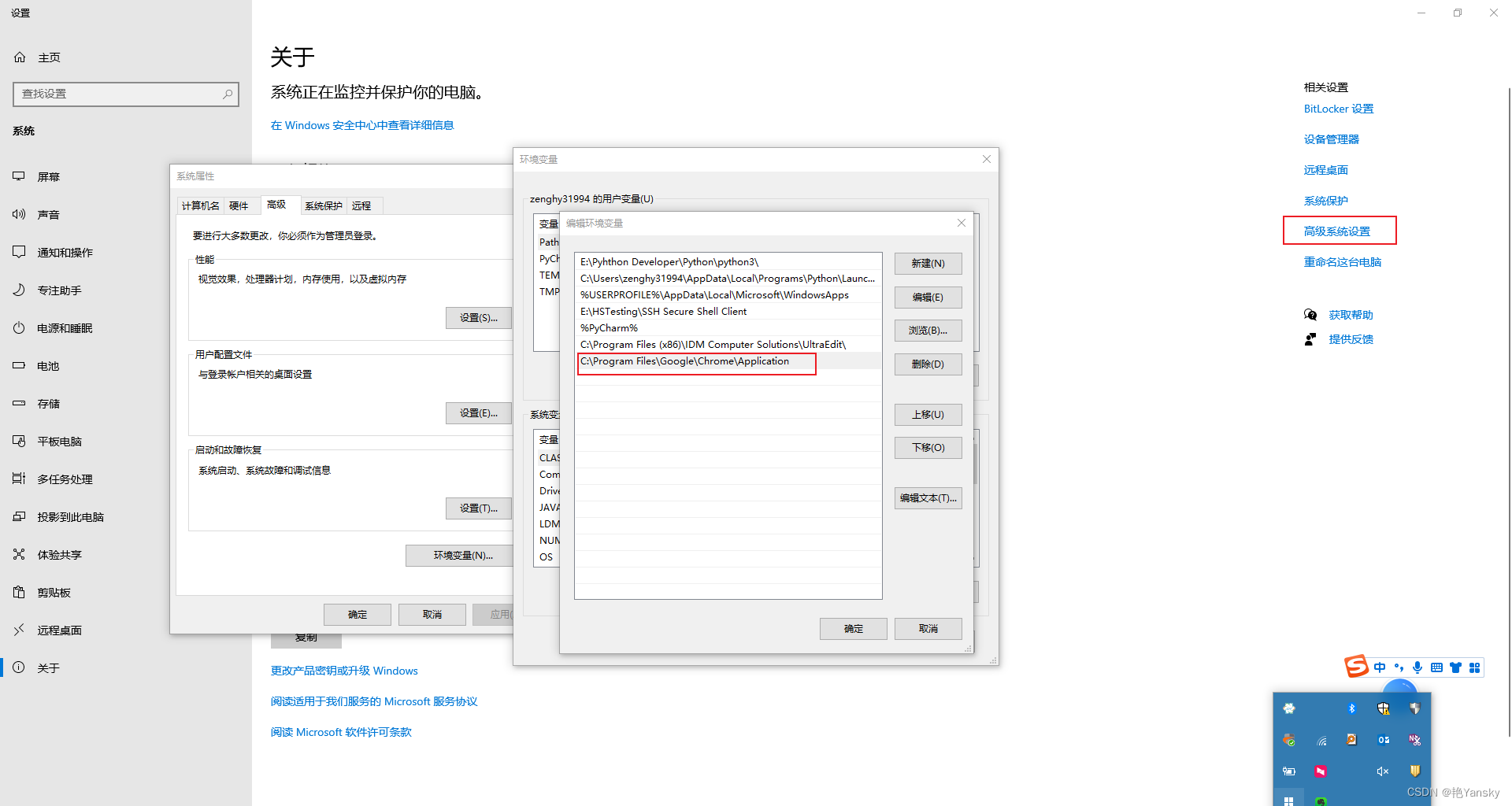
Selenium安装WebDriver:ChromeDriver与谷歌浏览器版本快速匹配_最新版120
最近在使用通过selenium操作Chrome浏览器时,安装中遇到了Chrome版本与浏览器驱动不匹配的的问题,在此记录安装下过程,如何快速找到与谷歌浏览器相匹配的ChromeDriver驱动版本。 1. 确定Chrome版本 我们首先确定自己的Chrome版本 Chrome设置…...
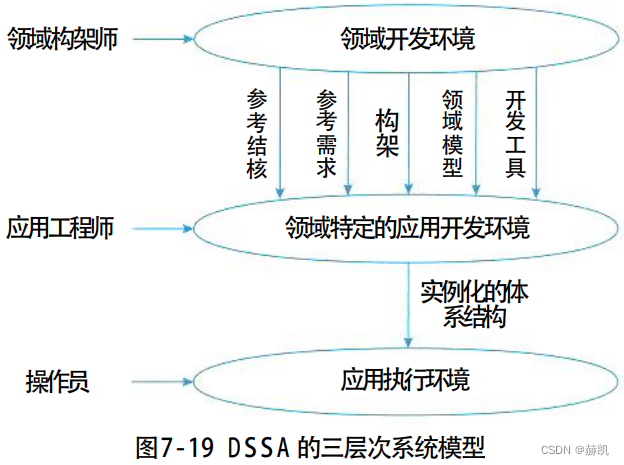
系统架构设计师教程(七)系统架构设计基础知识
系统架构设计基础知识 7.1 软件架构概念7.1.1 软件架构的定义7.1.2 软件架构设计与生命周期需求分析阶段设计阶段实现阶段构件组装阶段部署阶段后开发阶段 7.1.3 软件架构的重要性 7.2 基于架构的软件开发方法7.2.1 体系结构的设计方法概述7.2.2 概念与术语7.2.3 基于体系结构的…...

Bifrost 中间件 X-Requested-With 系统身份认证绕过漏洞复现
0x01 产品简介 Bifrost是一款面向生产环境的 MySQL,MariaDB,kafka 同步到Redis,MongoDB,ClickHouse等服务的异构中间件 0x02 漏洞概述 Bifrost 中间件 X-Requested-With 存在身份认证绕过漏洞,未经身份认证的攻击者可未授权创建管理员权限账号,可通过删除请求头实现身…...

OpenSSL 3.2.0新增Argon2支持——防GPU暴力攻击
1. 引言 OpenSSL新发布的3.20版本中,引入了一些新特性,包括: post-quantum方法Brainpool曲线QUICArgon2:Argon2 是一种慢哈希函数,在 2015 年获得 Password Hashing Competition 冠军,利用大量内存计算抵…...
数据结构--稀疏矩阵及Java实现
一、稀疏 sparsearray 数组 1、先看一个实际的需求 编写的五子棋程序中,有存盘退出和续上盘的功能。 分析问题: 因为该二维数组的很多值是默认值 0, 因此记录了很多没有意义的数据.->稀疏数组。 2、稀疏数组基本介绍 当一个数组中大部分元素为0…...
关于GPU使用过程中的若干问题
1.CUDA异常 问题描述:运行torch.cuda.is_available() 报错:cuda unknown error - this may be due to an incorrectly set up environment解决方案:重启 2.nvidia驱动版本不匹配 问题描述:运行nvidis-smi 报错:Fa…...
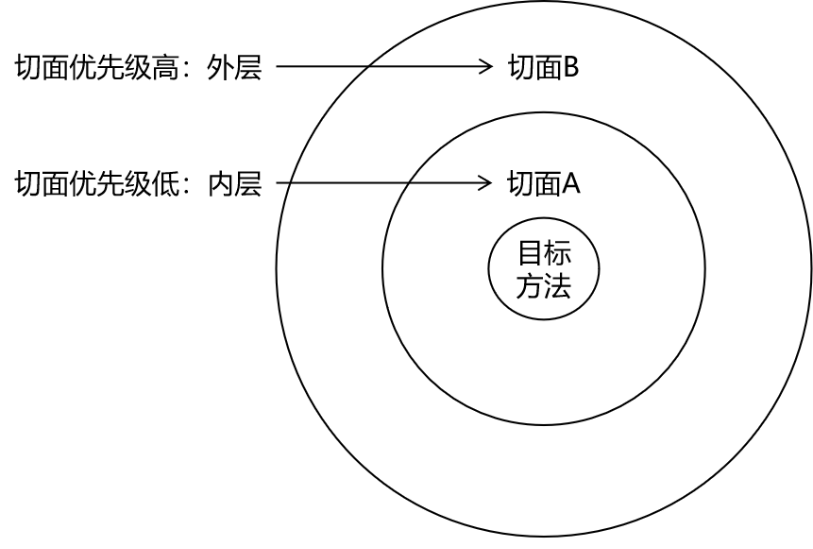
spring之面向切面:AOP(2)
学习的最大理由是想摆脱平庸,早一天就多一份人生的精彩;迟一天就多一天平庸的困扰。各位小伙伴,如果您: 想系统/深入学习某技术知识点… 一个人摸索学习很难坚持,想组团高效学习… 想写博客但无从下手,急需…...

【开题报告】基于uniapp的家庭记账小程序的设计与实现
1.研究背景 随着社会经济的发展和人们生活水平的提高,家庭财务管理变得越来越重要。家庭记账是一种重要的财务管理方式,通过记录和分析家庭的收入和支出情况,可以帮助家庭成员更好地理解和掌握自己的财务状况,合理规划和管理家庭…...

HTML5面试题
HTML5面试题 什么是HTML5?它与HTML4有何不同之处? HTML5是HTML的第五个主要版本,它引入了许多新的语义化元素、API和功能,以改进网页的结构、样式、交互和多媒体体验。 HTML5与HTML4的不同之处包括: 引入了一系列新的语…...

树莓派通过网线连接电脑并且设置设置链接wifi
好久没玩过树莓派了,系统进不去了,需要记录一下,之前总觉得自己会了,但是还是需要不断的翻阅资料。 树莓派 配置SD卡开启ssh - 哔哩哔哩 树莓派通过网线连接ssh 直接在sd卡建立一个ssh的文件,不要带任何后戳 ip查…...
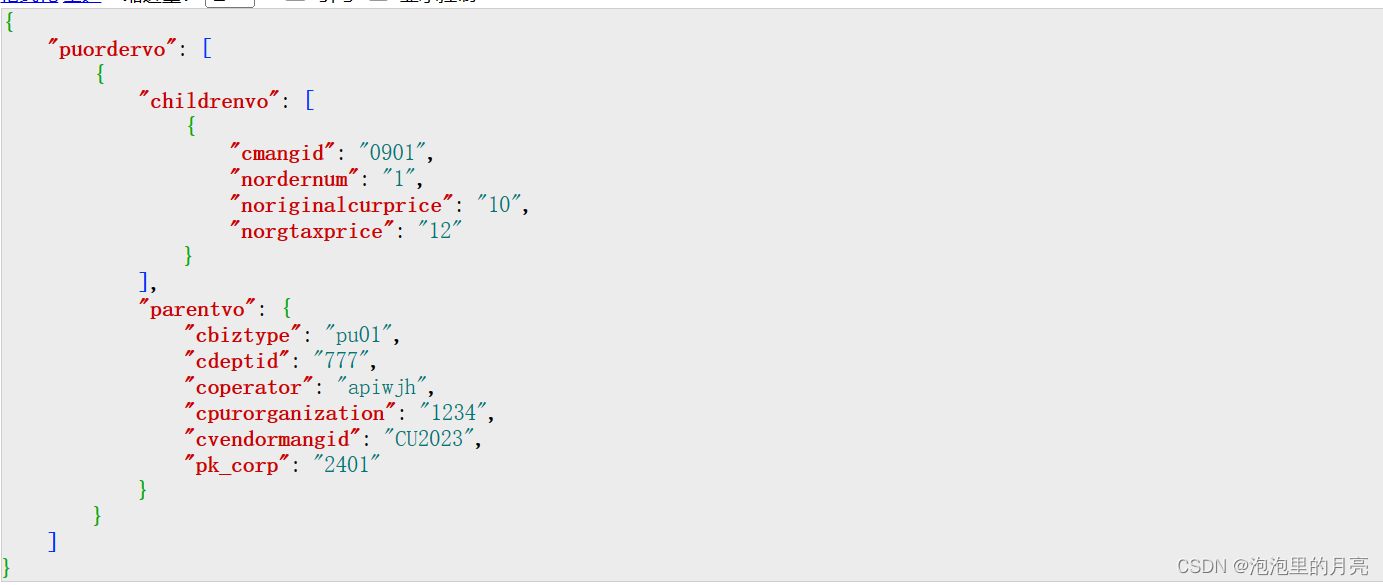
C#拼接JSON
一、业务背景 最近项目需要与U8c对接,实现增删改查,借此机会,梳理一下C#解析Json字符串的问题。 这篇文章,先以新增接口为例。 二、新增接口 查看需要传入的json格式。 拼接json,无非就是{}和[]的来回嵌套。 首先&am…...

评价机器学习模型的指标
为了衡量一个机器学习模型的好坏,需要给定一个测试集,用模型对测试集中的每一个样本进行预测,并根据预测结果计算评价分数。 对于分类问题,常见的评价标准有准确率、精确率、召回率和F值等。给定测试集 𝒯 {(…...
C# WPF上位机开发(日志调试)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 程序开发的过程中,调试肯定是少不了的。比如说,这个时候,我们可以设置断点、查看变量、检查函数调用堆栈等等。…...

AR室内导航如何实现?技术与原理分析
随着科技的进步,我们生活中许多方面正在被重新定义。其中之一就是导航,尤其是室内导航。增强现实(AR)技术的出现为室内导航带来了革命性的变革。本文将深入探讨AR室内导航的技术与原理,以及它如何改变我们的生活方式。…...

移动充电机器人AI边缘计算方案:从感知到精准对接的工程实践
1. 项目概述:当充电桩“活”了过来最近在跟进一个挺有意思的项目,跟几位做智慧园区和社区运营的朋友聊,他们都在头疼同一个问题:新能源车的充电焦虑,已经从“找不到桩”升级到了“桩被占着”。固定充电桩的利用率在高峰…...

[GESP202512 C++ 三级] 选择题第 8 题 ← unsigned int
【题目描述】 在一个特定的计算机系统中,假如 unsigned int 类型需要占用2个字节的存储空间(每个字节有8位),则 unsigned int 可以表示的数据范围是( A ) A. 0 ~ 65535 B. 0 ~ 65536 C. -65536 ~ 655…...

高效大语言模型优化全攻略:从量化、LoRA到推理引擎实战
1. 项目概述:为什么我们需要关注高效大语言模型?最近在GitHub上看到一个叫“Awesome-Efficient-LLM”的项目,点进去一看,好家伙,简直是个宝藏。这个项目本质上是一个精心整理的资源列表,专门收集那些致力于…...

智能体技能库构建指南:从基础工具到复杂工作流编排
1. 项目概述:智能体技能库的构建与价值最近在探索AI智能体(Agent)的开发与应用时,我一直在思考一个问题:一个真正“智能”的智能体,其核心能力究竟体现在哪里?是背后的大语言模型(LL…...

容器化应用分发平台seait:简化部署流程,实现一键运行
1. 项目概述:一个面向开发者的容器化应用分发平台最近在折腾个人项目部署和团队协作时,我一直在思考一个问题:如何能像分发一个可执行文件一样,轻松地分享和运行一个完整的、包含所有依赖的应用程序?尤其是在跨平台、跨…...

Taotoken标准OpenAI协议兼容性在实际项目迁移过程中带来的便利
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken标准OpenAI协议兼容性在实际项目迁移过程中带来的便利 1. 项目背景与迁移动因 我们维护着一个内部知识库问答系统&#x…...

面向对象_昂瑞微_作者观点仅供参考
C 语言面向对象编程实例解析 选自 OnMicro OM6626 BLE SDK 中的 DFU(Device Firmware Upgrade)模块。 适合有一定 C 基础、想理解"如何在 C 中实现面向对象"的初级工程师。 一、先看最终效果:调用方完全不关心底层实现 在 onmicro…...

终极指南:如何让微信网页版在浏览器中重新可用
终极指南:如何让微信网页版在浏览器中重新可用 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 还在为微信网页版无法正常访问而烦恼吗&…...

5个颠覆性文本处理技巧:让notepad--成为你的跨平台效率倍增器
5个颠覆性文本处理技巧:让notepad--成为你的跨平台效率倍增器 【免费下载链接】notepad-- 一个支持windows/linux/mac的文本编辑器,目标是做中国人自己的编辑器,来自中国。 项目地址: https://gitcode.com/GitHub_Trending/no/notepad-- …...
)
STM32CubeMX实战:FSMC高效驱动ILI9488 LCD屏(基于STM32F407)
1. 环境准备与硬件连接 在开始配置FSMC驱动ILI9488 LCD屏之前,我们需要准备好开发环境和硬件设备。我使用的是STM32F407VET6核心板搭配3.5寸320x480分辨率的ILI9488控制器TFT LCD屏幕。这种组合在工业控制和消费电子领域非常常见,性价比高且性能稳定。 硬…...