yolov5单目测距+速度测量+目标跟踪(算法介绍和代码)

要在YOLOv5中添加测距和测速功能,您需要了解以下两个部分的原理:
单目测距算法
- 单目测距是使用单个摄像头来估计场景中物体的距离。常见的单目测距算法包括基于视差的方法(如立体匹配)和基于深度学习的方法(如神经网络)。
- 基于深度学习的方法通常使用卷积神经网络(CNN)来学习从图像到深度图的映射关系。
单目测距代码
单目测距涉及到坐标转换,代码如下:
def convert_2D_to_3D(point2D, R, t, IntrinsicMatrix, K, P, f, principal_point, height):"""例如:像素坐标转世界坐标Args:point2D: 像素坐标点R: 旋转矩阵t: 平移矩阵IntrinsicMatrix:内参矩阵K:径向畸变P:切向畸变f:焦距principal_point:主点height:Z_wReturns:返回世界坐标系点,point3D_no_correct, point3D_yes_correct"""point3D_no_correct = []point3D_yes_correct = []##[(u1,v1),# (u2,v2)]point2D = (np.array(point2D, dtype='float32'))
在YOLOv5中添加单目测距功能的一种方法是,在训练集上收集带有物体标注和深度信息的数据。然后,可以使用深度学习模型(如卷积神经网络)将输入图像映射到深度图。训练完成后,您可以使用该模型来估计图像中物体的距离。

差帧算法(Frame Difference Algorithm)
- 差帧算法是一种基于视频序列的帧间差异来计算物体速度的方法。它基于一个简单的假设:相邻帧之间物体的位置变化越大,物体的速度越快。
- 差帧算法是一种基于视频序列的帧间差异来计算物体速度的方法。其原理是计算物体在相邻两帧之间的位置差异,然后通过时间间隔来计算物体的速度。
假设物体在第t帧和第(t-1)帧中的位置分别为pt和pt-1,则可以使用欧氏距离或其他相似度度量方法来计算它们之间的距离:
d = ||pt - pt-1||
其中||.||表示欧氏距离。然后,通过时间间隔Δt来计算物体的平均速度v:
v = d / Δt
其中,Δt表示第t帧和第(t-1)帧之间的时间间隔。在实际应用中,可以根据需要对速度进行平滑处理,例如使用移动平均或卡尔曼滤波等方法。
测速代码
以下是一个简单的差帧算法代码示例,用于计算物体在视频序列中的速度:```python
import cv2
import numpy as np# 读取视频文件
cap = cv2.VideoCapture('video.mp4')# 初始化参数
prev_frame = None
prev_position = None
fps = cap.get(cv2.CAP_PROP_FPS) # 视频帧率
speeds = [] # 存储速度值while cap.isOpened():ret, frame = cap.read()if not ret:breakgray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)if prev_frame is not None:# 计算当前帧和前一帧之间的位置差异flow = cv2.calcOpticalFlowFarneback(prev_frame, gray, None, 0.5, 3, 15, 3, 5, 1.2, 0)# 提取运动向量的x和y分量vx = flow[..., 0]vy = flow[..., 1]# 计算位置差异的欧氏距离distance = np.sqrt(np.square(vx) + np.square(vy))# 计算速度speed = np.mean(distance) * fpsspeeds.append(speed)# 可选:可视化结果flow_vis = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)flow_vis[..., 0] = np.arctan2(vy, vx) * (180 / np.pi / 2)flow_vis[..., 2] = cv2.normalize(distance, None, 0, 255, cv2.NORM_MINMAX)flow_vis = cv2.cvtColor(flow_vis, cv2.COLOR_HSV2BGR)cv2.imshow('Flow Visualization', flow_vis)if cv2.waitKey(1) & 0xFF == ord('q'):breakprev_frame = graycap.release()
cv2.destroyAllWindows()# 打印速度结果
print("速度列表:", speeds)
该代码使用OpenCV库中的`函数来计算相邻帧之间的光流向量,并通过欧氏距离计算位置差异。然后,通过视频的帧率计算速度,并将速度存储在一个列表中。你可以根据自己的需求对速度进行进一步处理或可视化。请注意,这只是一个简单的示例,实际应用中可能需要根据具体情况进行调整和改进。
追踪
而DeepSORT是一种目标跟踪算法,常与YOLOv5结合使用。
DeepSORT(Deep Learning + SORT)是一种基于深度学习和卡尔曼滤波的目标跟踪算法。它通过结合YOLOv5等目标检测器的输出和SORT(Simple Online and Realtime Tracking)算法的轨迹管理,实现对视频中目标的准确跟踪。
DeepSORT的主要特点如下:
- 多目标跟踪:DeepSORT能够同时跟踪多个目标,并为每个目标生成唯一的ID,以便在不同帧之间进行关联。
- 深度特征嵌入:DeepSORT使用深度学习模型(如ResNet)提取目标的特征向量,将其用于目标的身份验证和关联。
- 卡尔曼滤波:DeepSORT使用卡尔曼滤波器来预测目标的位置和速度,并通过将检测和预测结果进行关联,提供平滑的目标轨迹。
- 数据关联:DeepSORT使用匈牙利算法将当前帧的检测结果与上一帧的跟踪结果进行关联,以最大化目标标识的一致性
。
通过将YOLOv5和DeepSORT结合使用,可以实现准确的目标检测和连续的目标跟踪,从而在视频监控、自动驾驶、智能机器人等领域提供更加全面和高效的解决方案。这种结合能够在实时场景下处理大量目标,并为每个目标提供连续的轨迹信息,具有广泛的应用前景。
追踪代码
以下是一个简化的卡尔曼滤波算法的代码示例:
import numpy as npclass KalmanFilter:def __init__(self, state_dim, measurement_dim):# 初始化状态转移矩阵self.F = np.eye(state_dim)# 初始化测量矩阵self.H = np.eye(measurement_dim, state_dim)# 初始化状态估计self.x = np.zeros((state_dim, 1))# 初始化状态协方差矩阵self.P = np.eye(state_dim)# 初始化过程噪声协方差矩阵self.Q = np.eye(state_dim)# 初始化测量噪声协方差矩阵self.R = np.eye(measurement_dim)def predict(self):# 预测状态self.x = np.dot(self.F, self.x)# 预测状态协方差self.P = np.dot(np.dot(self.F, self.P), self.F.T) + self.Qdef update(self, z):# 计算预测残差y = z - np.dot(self.H, self.x)# 计算预测残差协方差S = np.dot(np.dot(self.H, self.P), self.H.T) + self.R# 计算卡尔曼增益K = np.dot(np.dot(self.P, self.H.T), np.linalg.inv(S))# 更新状态估计self.x = self.x + np.dot(K, y)# 更新状态协方差self.P = np.dot((np.eye(self.x.shape[0]) - np.dot(K, self.H)), self.P)# 示例用法
# 创建卡尔曼滤波器对象
kalman_filter = KalmanFilter(state_dim=2, measurement_dim=1)# 模拟测量值
measurements = [1.2, 1.7, 2.5, 3.6]# 进行预测和更新
for z in measurements:kalman_filter.predict()kalman_filter.update(np.array([[z]]))# 打印更新后的状态估计值print(kalman_filter.x)
上述代码是一个简单的一维卡尔曼滤波器的实现。您可以根据需要调整状态维度 state_dim 和测量维度 measurement_dim,并设置相应的状态转移矩阵 F、测量矩阵 H、过程噪声协方差矩阵 Q 和测量噪声协方差矩阵 R。然后,通过 predict() 方法进行预测,通过 update() 方法进行更新。
请注意,卡尔曼滤波算法的具体实现可能因应用场景而有所不同。这里提供的代码仅用于展示基本的卡尔曼滤波器结构和操作步骤,需要根据具体需求进行相应的调整和扩展。
总结
具体实现上述功能的步骤如下:

单目测距:
- 收集训练数据集,包含物体标注和对应的深度信息。
构建深度学习模型,例如使用卷积神经网络(如ResNet、UNet等)进行图像到深度图的映射。 - 使用收集的数据集进行模型训练,优化深度学习模型。
- 在YOLOv5中添加单目测距功能时,加载训练好的深度学习模型,并在检测到对象时,使用该模型估计距离。
差帧算法:
- 对视频序列进行物体检测和跟踪,获取物体在连续帧中的位置信息。
- 计算相邻帧之间物体位置的差异,可以使用欧氏距离或其他相似度度量方法。
qq 1309399183- 将差异除以时间间隔,得到物体的平均速度。
追踪算法
除了DeepSORT,还有一些其他常见的目标追踪算法:
-
SORT(Simple Online and Realtime Tracking):一个简单但高效的在线实时目标追踪算法,通过卡尔曼滤波器和匈牙利算法实现目标匹配。
-
MOSSE(Minimum Output Sum of Squared Error):一种基于相关滤波器的目标追踪算法,使用最小输出平方误差来更新模板。
-
KCF(Kernelized Correlation Filter):一种基于相关滤波器的目标追踪算法,使用核函数来建立目标与模板之间的关系。
-
TLD(Tracking-Learning-Detection):一种结合了目标检测和跟踪的方法,使用学习算法来提高目标模型的准确性。
-
ECO(Efficient Convolution Operators):一种基于傅里叶变换的目标追踪算法,能够快速计算目标模板与搜索区域之间的相似度。
-
C-COT(Context-aware Correlation Tracking):一种基于上下文感知的目标追踪算法,使用上下文信息来提高目标模板的鲁棒性。
-
StapleTrack:一种基于稀疏表示的目标追踪算法,使用稀疏编码来提取目标的特征表示。
这些追踪算法各有优缺点,具体应用时需要根据实际需求选择合适的算法。
相关文章:
yolov5单目测距+速度测量+目标跟踪(算法介绍和代码)
要在YOLOv5中添加测距和测速功能,您需要了解以下两个部分的原理: 单目测距算法 单目测距是使用单个摄像头来估计场景中物体的距离。常见的单目测距算法包括基于视差的方法(如立体匹配)和基于深度学习的方法(如神经网…...
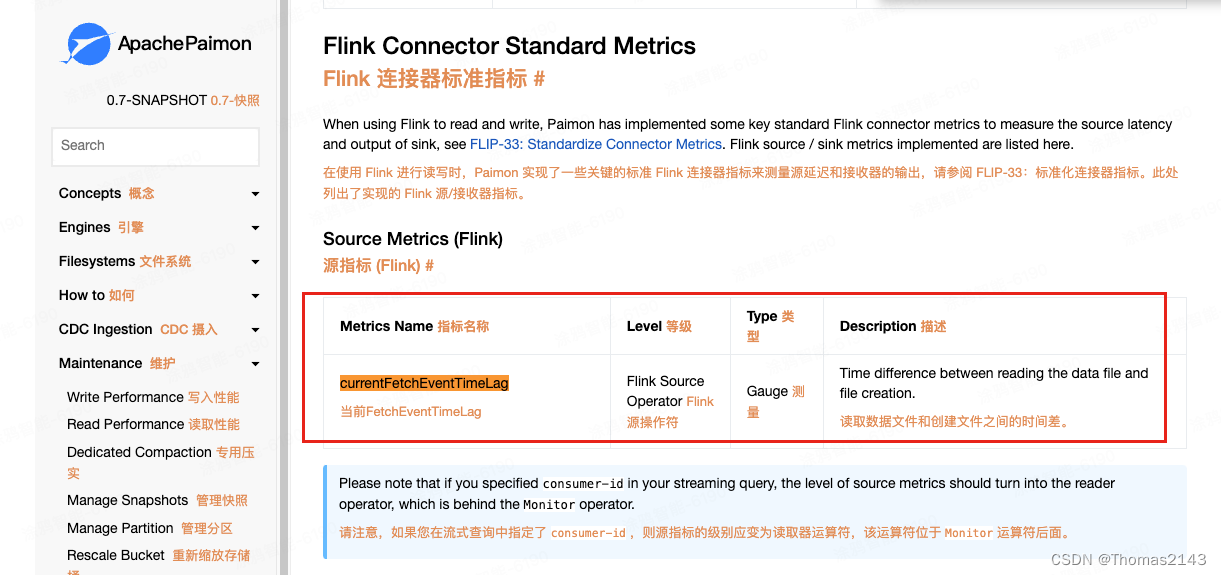
flink 读取 apache paimon表,查看source的延迟时间 消费堆积情况
paimon source查看消费的数据延迟了多久 如果没有延迟 则显示0 官方文档 Metrics | Apache Paimon...
无人机在融合通信系统中的应用
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,现今无人机在航拍、农业、快递运输、测绘、新闻报道多个领域中都有深度的应用。 在通信行业中,无人机广泛应用于交通,救援,消…...
MySQL库的操作
目录 创建数据库创建数据库案例字符集和校验规则查看系统默认字符集以及校验规则查看数据库支持的字符集查看数据库支持的字符集校验规则校验规则对数据库的影响 操纵数据库查看数据库修改数据库删除数据库数据库备份和恢复表的备份和恢复查看连接情况 创建数据库 创建数据库的…...

服务器解析漏洞有哪些?IIS\APACHE\NGINX解析漏洞利用
解析漏洞是指在Web服务器处理用户请求时,对输入数据(如文件名、参数等)进行解析时产生的漏洞。这种漏洞可能导致服务器对用户提供的数据进行错误解析,使攻击者能够执行未经授权的操作。解析漏洞通常涉及到对用户输入的信任不足&am…...

Https图片链接下载问题
1. 获取方法 入参是一个Url, 和一个随机的名称. 返回值是MultipartFile, 这里因为我这里需要调接口传到服务器, 这里也可以直接通过inputStream进行操作. 按需修改 /*** 通过Url获取文件** param url* param fileName 随机产生一个文件名, 可以是uuid等* return* throws Excep…...

Wireshark在移动网络中的应用
第一章:Wireshark基础及捕获技巧 1.1 Wireshark基础知识回顾 1.2 高级捕获技巧:过滤器和捕获选项 1.3 Wireshark与其他抓包工具的比较 第二章:网络协议分析 2.1 网络协议分析:TCP、UDP、ICMP等 2.2 高级协议分析:HTTP…...
)
Leetcode 1901. 寻找峰值 II(Java + 列最大值 + 二分)
题目 1901. 寻找峰值 II 一个 2D 网格中的 峰值 是指那些 严格大于 其相邻格子(上、下、左、右)的元给你一个 从 0 开始编号 的 m x n 矩阵 mat ,其中任意两个相邻格子的值都 不相同 。找出 任意一个 峰值 mat[i][j] 并 返回其位置 [i,j] 。你可以假设整个矩阵周边…...

RabbitMQ 消息持久化
默认情况下,exchange、queue、message 等数据都是存储在内存中的,这意味着如果 RabbitMQ 重启、关闭、宕机时所有的信息都将丢失。 RabbitMQ 提供了持久化来解决这个问题,持久化后,如果 RabbitMQ 发送 重启、关闭、宕机ÿ…...
Opencv实验合集——实验四:图片融合
1.概念 图像融合是将两个或多个图像结合在一起,创建一个新的图像的过程。这个过程的目标通常是通过合并图像的信息来获得比单个图像更全面、更有信息量的结果。图像融合可以在许多领域中应用,包括计算机视觉、遥感、医学图像处理等。 融合的方法有很多…...

Java复习
CH1 Java Fundamentals 1.1 Java Features(java特色) 1.1 Simplicity: simple grammar, rich library 简单好用: 语法简单,库文件丰富 1.2 Pure OO: everything is object! 所有程序都是对象 1.3 Security: memory access,…...

腾讯云微服务11月产品月报 | TSE 云原生 API 网关支持 WAF 对象接入
2023年 11月动态 TSE 云原生 API 网关 1、支持使用私有 DNS 解析 服务来源支持私有 DNS 解析器,用户可以添加自己的 DNS 解析器地址进行私有域名解析,适用于服务配置了私有域名的用户。 2、支持 WAF 对象接入 云原生 API 网关对接 Web 安全防火墙&…...

性能优化-待处理
1 性能优化-循环展开...

Linux: sysctl: network: ip_no_pmtu_disc,容易搞混的参数名称
这个参数的迷惑性在于双重否定,字面意思是关闭PMTU发现的功能。如果设置为1,代表关闭;如果是0,代表不关闭pmtu发现的功能。所以说明里,有disable/enable,就容易搞混。所以要甄别网上的某些博客的说明,不要被误导。 ip_no_pmtu_disc - INTEGER Disable Path MTU Discover…...

关于“Python”的核心知识点整理大全26
目录 10.3.9 决定报告哪些错误 10.4 存储数据 10.4.1 使用 json.dump()和 json.load() number_writer.py number_reader.py 10.4.2 保存和读取用户生成的数据 对于用户生成的数据,使用json保存它们大有裨益,因为如果不以某种方式进行存储…...
Axure中继器完成表格的增删改查的自定义元件(三列表格与十列表格)
目录 一、中继器 1.1 定义 1.2 特点 1.3 适用场景 二、三列表格增删改查 2.1 实现思路 2.2 效果演示 三、十列表格增删改查 3.1 实现思路 3.2 效果演示 一、中继器 1.1 定义 在Axure中,"中继器"通常指的是界面设计中的一个元素,用…...

刚clone下来的项目如何上传到新的仓库
查看当前项目的git信息 git remote -v 查看git目录上传到哪个路径下 拉下的项目如何上传到新的仓库 git clone xxxcd xxxrm -r .git 删除原有的git信息,有问题一直回车git init 初始化gitgit add . git commit -m ‘xxx’git remote add origin 远程库地址&#…...
【ARMstm32】【华清远见西安中心】)
面试题总结(十五)【ARMstm32】【华清远见西安中心】
ARM Cortex-M,Cortex-R,Cortex-A的区别和差异是什么? ARM Cortex-M,Cortex-R和Cortex-A是ARM架构下的不同处理器系列,针对不同的应用领域和需求进行了优化和设计。它们之间的区别和差异主要体现在以下几个方面: 1. 应用领域&#…...

助听器概述
助听器概述 什么是助听器? 助听器是一种放置在耳内或耳后的小型电子设备。助听器可以放大声音,使听力损失的人能够提高他们的听力和言语理解能力。 今天有许多不同类型的助听器,包括处方助听器和非处方 (OTC) 助听器…...
学习k8s
学习k8s 我为什么要用k8s 和其他部署方式的区别是什么? 传统部署方式 java --> package --> 放到服务器上 --> Tomcat 如果是同时进行写操作,会存在并发问题. 用户 --网络带宽–> 服务器 -->服务 同一个服务器上,多个服务: 网络资源的占用 内存的占用 cpu的占…...

SSD硬件加密性能无损?十年调查揭示五大认知误区与实战指南
1. 项目概述:一次关于SSD认知误区的深度调查最近在整理资料时,翻到了一篇2014年来自EE Times的旧文,内容是关于存储网络行业协会(SNIA)发起的一项固态硬盘(SSD)用户调查。虽然时间过去近十年&am…...

为OpenClaw智能体工作流配置Taotoken作为核心模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为OpenClaw智能体工作流配置Taotoken作为核心模型提供商 OpenClaw是一个流行的智能体开发框架,它允许开发者构建和编排…...
)
仅限内部测试者知晓:Midjourney未公开的--detail boost隐式指令(实测使睫毛/织物/金属反光细节识别率提升3.2倍)
更多请点击: https://intelliparadigm.com 第一章:Midjourney图像放大与细节增强 Midjourney v6 及后续版本原生支持高分辨率图像生成与智能细节增强,其核心能力不仅依赖于模型权重,更通过 --zoom 2、--style raw 和 --s 750 等参…...

【仿真实战】AnyLogic地铁站客流仿真:从零搭建带安检与限流的多层车站模型
1. 从零开始搭建地铁站仿真模型 第一次接触AnyLogic做地铁站客流仿真时,我完全被各种模块和参数搞晕了。后来在几个实际项目中摸爬滚打,终于总结出一套小白也能快速上手的方法。这次我们就来搭建一个包含安检区和限流措施的多层地铁站模型,整…...

基于Python与MediaPipe的手势控制系统:从原理到实战
1. 项目概述:用摄像头读懂你的手,让手势成为新鼠标如果你厌倦了每天在键盘和鼠标之间来回切换,或者只是单纯想体验一下《少数派报告》里汤姆克鲁斯隔空操作电脑的酷炫感,那么这个基于Python的手势控制系统绝对值得你花时间折腾一下…...

从泡泡实验室到阿木社区:PX4开发者如何在国内技术圈子里快速成长?
从泡泡实验室到阿木社区:PX4开发者如何在国内技术圈子里快速成长? 在无人机开源飞控领域,PX4和Pixhawk已经成为开发者绕不开的技术栈。但相比国外活跃的开发者社区,国内的技术生态往往让新手感到无从下手——百度贴吧的讨论碎片化…...

多波束声呐接收机与信号处理算法【附程序】
✨ 长期致力于多通道声呐接收机、电路设计、FPGA、数字信号处理、波束形成研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)小型化96通道接收机硬件电路…...

SAP ABAP开发避坑指南:NATIVE SQL里那个冒号和MANDT字段,你写对了吗?
SAP ABAP开发实战:NATIVE SQL高频陷阱与性能优化全解析 在SAP ABAP开发领域,NATIVE SQL就像一把双刃剑——它既能突破Open SQL的限制直接操作底层数据库,又隐藏着无数让开发者"踩坑"的语法细节。根据SAP官方统计,超过60…...

从理论到仿真:深入解读Walker星座设计,用STK验证你的卫星通信作业
从理论到仿真:深入解读Walker星座设计,用STK验证你的卫星通信作业 卫星通信系统的设计从来不是纸上谈兵。当你在教科书上看到那些优美的轨道方程和覆盖计算公式时,是否想过如何将它们转化为真实的系统性能验证?这正是STKÿ…...

【必收藏】2026年大模型学习全指南|小白程序员入门捷径,抓住百万年薪红利
2026年的AI行业,机遇早已从风口走向实锤——应用层依旧是那片肉眼可见的黄金赛道!从大厂技术布局到招聘市场风向标,所有信号都在一致指向:大模型应用开发,已然成为程序员突破职业瓶颈、实现薪资跃升的核心赛道。 字节跳…...