STM32为基础的模拟I2C通用8bit和16bit读取以及多字节读取
GPIO模拟I2C驱动的通用代码,I2C的寄存器地址有8位和16位的,主要解决了同一个MCU同时处理8位和16位寄存器地址芯片时候的驱动问题。
typedef enum {IIC_8BIT_BASE_ADDR,IIC_16BIT_BASE_ADDR
}iic_bits_e;
typedef struct {uint8_t DevAddr;uint16_t RegAddr;uint8_t data_len;uint8_t * data_buf;uint8_t bit_flag;uint16_t delay;
}iic_param_t;以上是结构体,作为参数,其中DevAddr是芯片地址,RegAddr是寄存器地址,data_len是写入或者读取的数据长度,data_buf是写入或者读出的数据缓冲区,bit_flag是寄存器位数IIC_8BIT_BASE_ADDR是8位,IIC_16BIT_BASE_ADDR是16位。delay是根据需求读写数据时候的延时。根据芯片需求填写,用不到就填0
下面是用法:
写8bit寄存器
void bq27426_write_data(uint16_t reg, uint8_t * buf, uint8_t len)
{iic_param_t bq27426 = {BQ27426_DEV_ADDR,0,0,NULL,IIC_8BIT_BASE_ADDR,30};bq27426.RegAddr = reg;bq27426.data_buf = buf;bq27426.data_len = len;simulate_i2c_writeblock(&bq27426);}写16bit寄存器
void cypd3176_write_data(uint16_t reg, uint8_t * buf, uint8_t len)
{iic_param_t cypd3176 = {CYPD3176_DEV_ADDR,0,0,NULL,IIC_16BIT_BASE_ADDR,0};cypd3176.RegAddr = reg;cypd3176.data_buf = buf;cypd3176.data_len = len;simulate_i2c_writeblock(&cypd3176);
}读8bit寄存器
void bq27426_read_data(uint16_t reg, uint8_t * buf, uint8_t len)
{iic_param_t bq27426 = {BQ27426_DEV_ADDR,0,0,NULL,IIC_8BIT_BASE_ADDR,30};bq27426.RegAddr = reg;bq27426.data_buf = buf;bq27426.data_len = len;simulate_i2c_readblock(&bq27426);}读16bit寄存器
void cypd3176_read_data(uint16_t reg, uint8_t * buf, uint8_t len)
{iic_param_t cypd3176 = {CYPD3176_DEV_ADDR,0,0,NULL,IIC_16BIT_BASE_ADDR,0};cypd3176.RegAddr = reg;cypd3176.data_buf = buf;cypd3176.data_len = len;simulate_i2c_readblock(&cypd3176);
}下面是源码
#include "stdio.h"
#include "simulate.h"#define PORT_I2C_SCL GPIOB
#define PIN_I2C_SCL GPIO_Pin_6#define PORT_I2C_SDA GPIOB
#define PIN_I2C_SDA GPIO_Pin_7#define simulate_IIC_SCL PBout(6)
#define simulate_IIC_SDA PBout(7)
#define simulate_READ_SDA PBin(7) static void i2c_Delay(void);
static void i2c_PinModeOutput(void);
static void i2c_PinModeInput(void);
static void i2c_SCL(uint8_t stat);
static void i2c_SDA(uint8_t stat);
static uint8_t i2c_ReadSDA(void);
static void i2c_Stop(void);iic_param_t simulate = {simulate_ADDR,0,0,NULL,IIC_16BIT_BASE_ADDR,0
};static void i2c_Delay(void)
{unsigned char t = 3;while (t--);
}static void i2c_PinModeOutput(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // ʹ��A�˿�ʱ��GPIO_InitStructure.GPIO_Pin = PIN_I2C_SDA;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // �������GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // �ٶ�50MHzGPIO_Init(PORT_I2C_SDA, &GPIO_InitStructure); // ��ʼ��PA0,1
}static void i2c_PinModeInput(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // ʹ��A�˿�ʱ��GPIO_InitStructure.GPIO_Pin = PIN_I2C_SDA;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // �������GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // �ٶ�50MHzGPIO_Init(PORT_I2C_SDA, &GPIO_InitStructure); // ��ʼ��PA0,1
}static void i2c_SCL(uint8_t stat)
{if (stat){simulate_IIC_SCL = 1;}else{simulate_IIC_SCL = 0;}
}static void i2c_SDA(uint8_t stat)
{if (stat){simulate_IIC_SDA = 1;}else{simulate_IIC_SDA = 0;}
}static uint8_t i2c_ReadSDA(void)
{if (simulate_READ_SDA){return 1;}else{return 0;}
}void i2c_Start(void)
{i2c_PinModeOutput();i2c_SDA(1);i2c_Delay();i2c_SCL(1);i2c_Delay();i2c_SDA(0);i2c_Delay();i2c_SCL(0);i2c_Delay();
}void i2c_Stop(void)
{i2c_PinModeOutput();i2c_SCL(0);i2c_SDA(0);i2c_Delay();i2c_SCL(1);i2c_Delay();i2c_SDA(1);i2c_Delay();
}void i2c_WriteByte(uint8_t _ucByte)
{uint8_t i;i2c_PinModeOutput();i2c_SCL(0);i2c_Delay();for (i = 0; i < 8; i++){if (_ucByte & 0x80){i2c_SDA(1);}else{i2c_SDA(0);}_ucByte = _ucByte << 1;i2c_SCL(1);i2c_Delay();i2c_SCL(0);i2c_Delay();}i2c_SDA(1);
}uint8_t i2c_ReadByte(void)
{uint8_t i;uint8_t recv = 0;i2c_PinModeOutput();i2c_SDA(1);i2c_Delay();i2c_PinModeInput();for (i = 0; i < 8; i++){recv = recv << 1;i2c_SCL(1);i2c_Delay();if (i2c_ReadSDA()){recv |= 0x01;}else{recv |= 0x00;}i2c_SCL(0);i2c_Delay();}return recv;
}void i2c_Ack(void)
{i2c_PinModeOutput();i2c_SCL(0);i2c_SDA(0);i2c_Delay();i2c_SCL(1);i2c_Delay();i2c_SCL(0);
}void i2c_NAck(void)
{i2c_PinModeOutput();i2c_SCL(0);i2c_SDA(1);i2c_Delay();i2c_SCL(1);i2c_Delay();i2c_SCL(0);
}uint8_t i2c_CheckAck(void)
{uint8_t time = 0;i2c_PinModeOutput();i2c_SDA(1);i2c_Delay();i2c_SCL(1);i2c_Delay();i2c_PinModeInput();while (i2c_ReadSDA()){time++;if (time >= 100){return 1;}}i2c_SCL(0);return 0;
}#define I2C_WR 0x00
#define I2C_RD 0x01
#define ACK 0
#define NOACK 1void simulate_i2c_init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_SetBits(GPIOB, GPIO_Pin_6 | GPIO_Pin_7);
}uint8_t iic_chip_select(iic_param_t *param, uint8_t rw_flag)
{uint16_t i = 0;if (param->data_len > 40){return 0xf1;}if (param->data_buf == NULL){return 0xF2;}for (i = 0; i < 3; i++){i2c_Start();i2c_WriteByte((param->DevAddr << 1) | rw_flag); if (i2c_CheckAck() == ACK){break;}}if (i >= 3){i2c_Stop();return 0xf1;}return 0;
}uint8_t simulate_i2c_writeblock(iic_param_t *param)
{uint16_t i;if (0 != iic_chip_select(param, I2C_WR)){return 0xF1;}if (IIC_16BIT_BASE_ADDR == param->bit_flag){i2c_WriteByte((param->RegAddr & 0xFF00) >> 8);if (i2c_CheckAck() == NOACK){i2c_Stop();return 0xf7;}}i2c_WriteByte(param->RegAddr & 0x00FF);if (i2c_CheckAck() == NOACK){i2c_Stop();return 0xf3;}for (i = 0; i < param->data_len; i++){i2c_WriteByte(param->data_buf[i]);if (i2c_CheckAck() == NOACK){i2c_Stop();return 0xf4;}}i2c_Stop();for (i = 0; i < 100; i++){i2c_Delay();}return 0;
}uint8_t simulate_i2c_readblock(iic_param_t *param)
{uint16_t i;int16_t j;if (0 != iic_chip_select(param, I2C_WR)){return 0xF1;}/* 发送地址 */if (IIC_16BIT_BASE_ADDR == param->bit_flag){i2c_WriteByte((param->RegAddr & 0xFF00) >> 8);if (i2c_CheckAck() == NOACK){i2c_Stop();return 0xf7;}}i2c_WriteByte(param->RegAddr & 0x00FF);if (i2c_CheckAck() == NOACK){i2c_Stop();return 0xf8;}if (0 != iic_chip_select(param, I2C_RD)){return 0xF1;}for (i = 0; i < param->data_len - 1; i++){for (j = 0; j < param->delay; j++){i2c_Delay();}param->data_buf[i] = i2c_ReadByte();for (j = 0; j < param->delay; j++){i2c_Delay();}i2c_Ack();}for (j = 0; j < param->delay; j++){i2c_Delay();}param->data_buf[param->data_len - 1] = i2c_ReadByte();i2c_NAck();i2c_Stop();return 0;
}#ifndef __IIC_DRIVER_H__
#define __IIC_DRIVER_H__#include "sys.h"
#include "stdlib.h" #define simulate_ADDR (0x5F)typedef enum {IIC_8BIT_BASE_ADDR,IIC_16BIT_BASE_ADDR
}iic_bits_e;
typedef struct {uint8_t DevAddr;uint16_t RegAddr;uint8_t data_len;uint8_t * data_buf;uint8_t bit_flag;uint16_t delay;
}iic_param_t;void simulate_i2c_init(void);
uint8_t simulate_i2c_readblock(iic_param_t * param);
uint8_t simulate_i2c_writeblock(iic_param_t * param);#endif 如果找不到PBout可用下面的头文件,其他平台可以自己实现设置管脚的输入和输出模式替换掉文中的PBout PBin的接口
/* Includes ------------------------------------------------------------------*/
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08 #define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n)
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n)#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n)
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n)#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n)
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n)#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n)
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n)
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n)#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n)
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) #define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n)
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) #endif
相关文章:

STM32为基础的模拟I2C通用8bit和16bit读取以及多字节读取
GPIO模拟I2C驱动的通用代码,I2C的寄存器地址有8位和16位的,主要解决了同一个MCU同时处理8位和16位寄存器地址芯片时候的驱动问题。 typedef enum {IIC_8BIT_BASE_ADDR,IIC_16BIT_BASE_ADDR }iic_bits_e; typedef struct {uint8_t DevAddr;uint16_t RegA…...
算法训练营Day19
#Java #二叉树 #双指针 开源学习资料 Feeling and experiences: 二叉搜索树的最小绝对差:力扣题目链接 给你一个二叉搜索树的根节点 root ,返回 树中任意两不同节点值之间的最小差值 。 差值是一个正数,其数值等于两值之差的…...

C++数据结构——二叉搜索树详解
目录 一,关于二叉搜索树 1.1 概念 1.2 基本结构 二,二叉搜索树接口实现 2.1 插入 2.2 查找 2.3 打印 2.4* 删除 三,二叉搜索树接口递归实现 3.1 查找 3.2 插入 3.3 删除 四,二叉搜索树的默认成员函数 五,…...
ros2机器人在gazebo中移动方案
原文连接Gazebo - Docs: Moving the robot (gazebosim.org) 很重要的地方:使用虚拟机运行Ubuntu的时候,需要关闭”加速3D图形“的那个选项,否则gazebo无法正常显示。 Moving the robot(使用命令移动机器人示例) In t…...
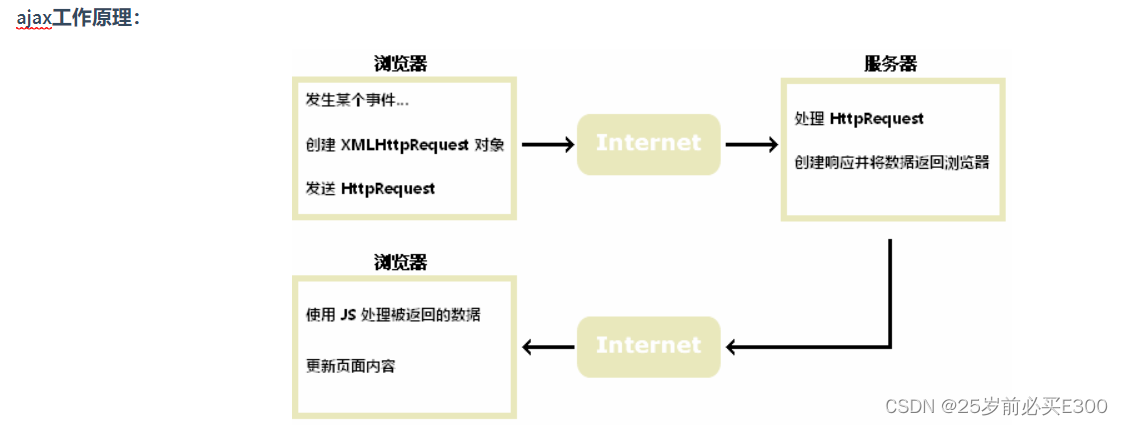
学习Java第74天,Ajax简介
什么是ajax AJAX Asynchronous JavaScript and XML(异步的 JavaScript 和 XML)。 AJAX 不是新的编程语言,而是一种使用现有标准的新方法。 AJAX 最大的优点是在不重新加载整个页面的情况下,可以与服务器交换数据并更新部分网页…...

【Java面试题】在Java中String,Stringbuffer,StringBuilder的区别?
Hi i,m JinXiang ⭐ 前言 ⭐ 本篇文章主要介绍在Java中String,Stringbuffer,StringBuilder的区别以及部分理论知识 🍉欢迎点赞 👍 收藏 ⭐留言评论 📝私信必回哟😁 🍉博主收将持续更新学习记录…...
让AIGC成为你的智能外脑,助力你的工作和生活
人工智能成为智能外脑 在当前的科技浪潮中,人工智能技术正在以前所未有的速度改变着我们的生活和工作方式。其中,AIGC技术以其强大的潜力和广泛的应用前景,正在引领着这场革命。 AIGC技术是一种基于人工智能的生成式技术,它可以通…...

ubuntu12.04 源
替换 /etc/apt/sources.list deb http://old-releases.ubuntu.com/ubuntu precise main restricted universe multiverse deb http://old-releases.ubuntu.com/ubuntu precise-security main restricted universe multiverse deb http://old-releases.ubuntu.com/ubu…...

openssl数据压缩
介绍 数据压缩是将原有数据通过某种压缩算法计算得到相对数据量小的过程。这种过程是可逆的,即能通过压缩后的数据恢复出原数据。数据压缩能够节省存储空间,减轻网络负载。 在即需要加密又需要压缩的情况下,必须先压缩再加密,次…...

SQLturning:定位连续值范围起点和终点
在上一篇blog说到,如何去优化查询连续值范围,没看过的朋友,上篇blog链接[在此]。(https://blog.csdn.net/weixin_42575078/article/details/135067645?spm1001.2014.3001.5501) 那么今天来说说怎么将连续的数据合并,然后返回合并…...

饥荒Mod 开发(十七):手动保存和加载,无限重生
饥荒Mod 开发(十六):五格装备栏 饥荒Mod 开发(十八):Mod 添加配置选项 饥荒游戏会自动保存,本来是一个好的机制,但是当角色死亡的时候存档会被删除,又要从头开始,有可能一不小心玩了很久的档就直接给整没了…...

Skywalking系列之最新版9.2.0-JavaAgent本地构建
MAC 10.15.7IDEA 2021.2skywalking-agent 9.2.0-SNAPSHOTJDK 17/21 (最新的代码要看最新的要求,注意不能使用JDK8,会构建失败)Maven 3.6.0 关于本地构建JavaAgent源码 1、获取源码,加载submodule 分步执行: git clone https:/…...
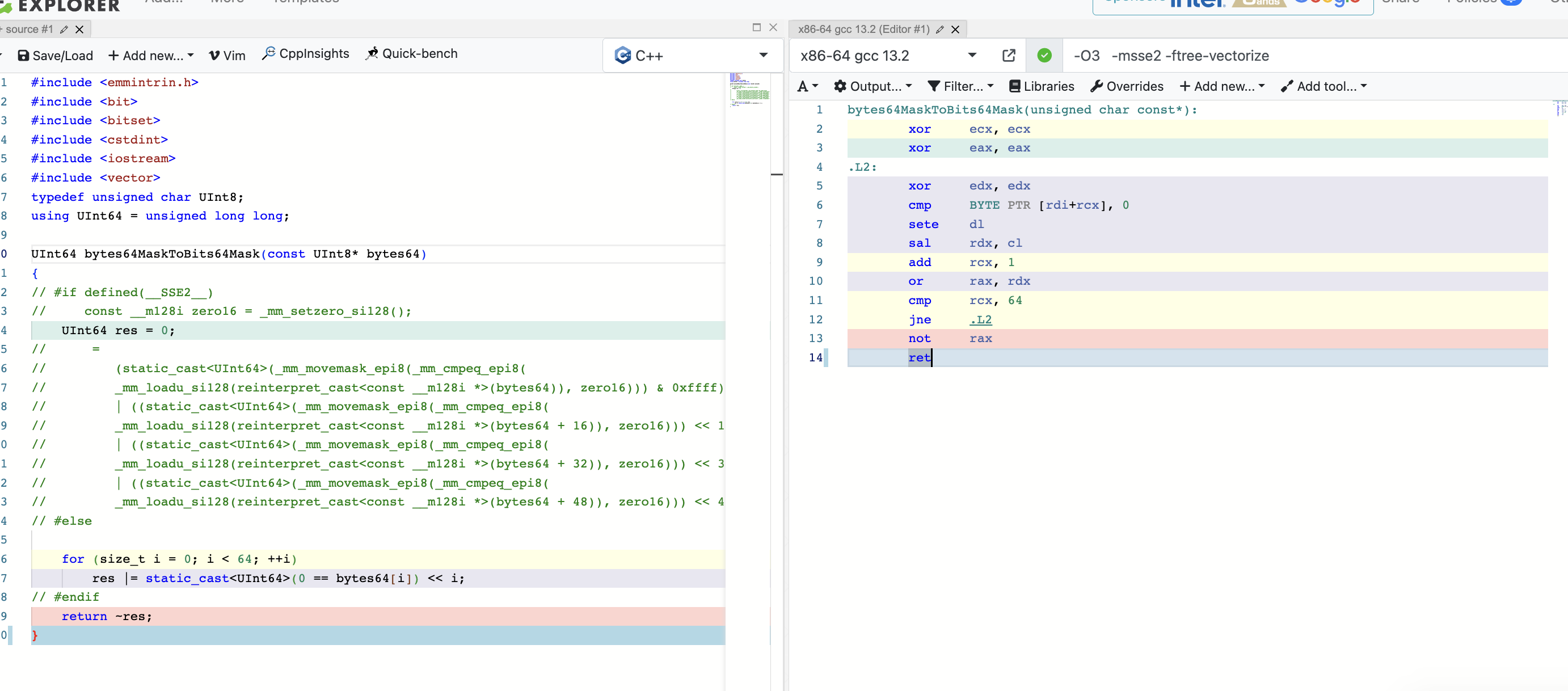
olap/clickhouse-编译器优化与向量化
本文主要结合15721和clickhouse源码来聊聊向量化,正好我最近也在用Eigen做算子加速,了解下还是有好处的。 提示编译器 提示编译器而不是复杂化简单的代码 什么时候使用汇编,什么时候使用SIMD?下面有几个基本原则: …...

RK3399平台开发系列讲解(内核入门篇)网络协议的分层
🚀返回专栏总目录 文章目录 一、应用层二、传输层三、网络层四、数据链路层(Data Link Layer)五、物理层沉淀、分享、成长,让自己和他人都能有所收获!😄 📢对于多数的应用和用户而言,使用互联网的一个基本要求就是数据可以无损地到达。用户通过应用进行网络通信...
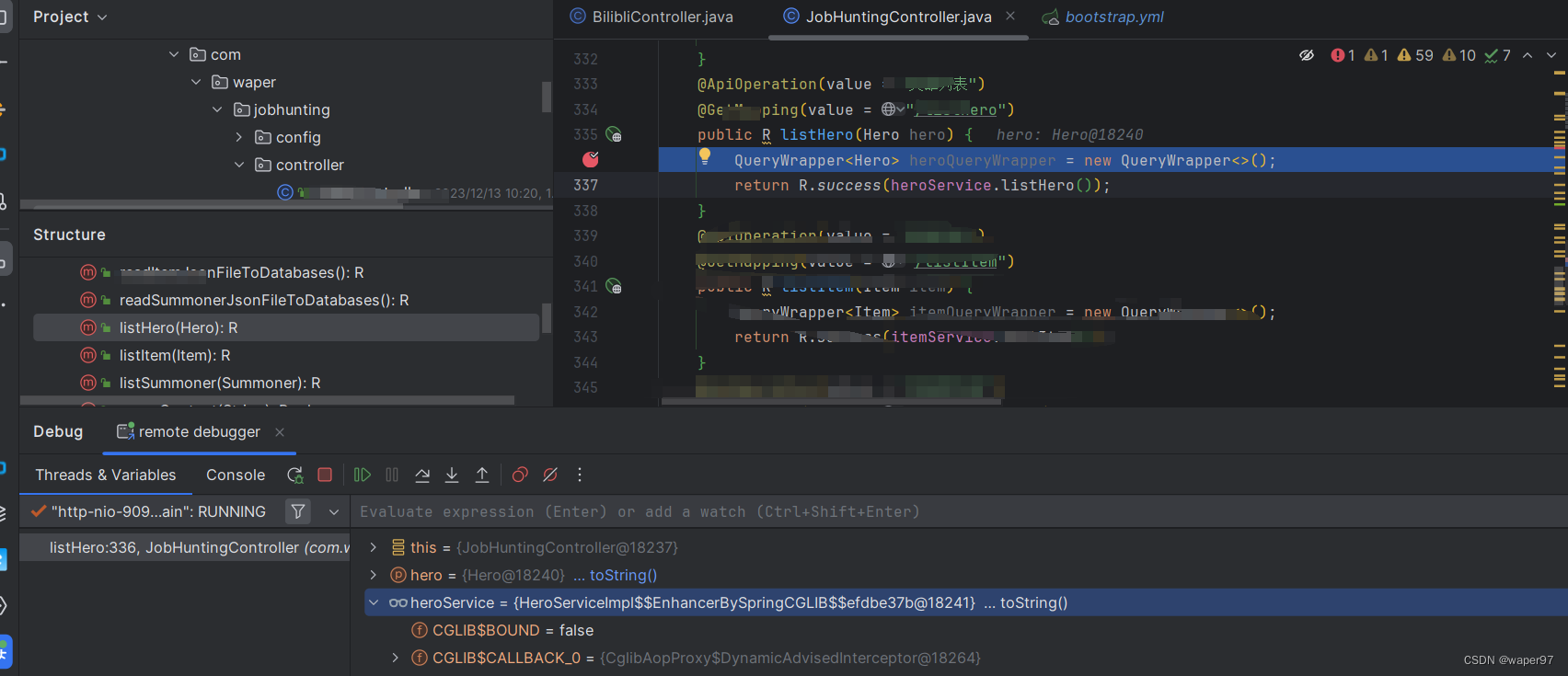
Idea远程debugger调试
当我们服务部署在服务器上,我们想要像在本地一样debug,就可以使用idea自带的Remote JVM Debug 创建Remote JVM Debug服务器启动jar打断点进入断点 当我们服务部署在服务器上,我们想要像在本地一样debug,就可以使用idea自带的 Remote JVM Debug) 创建Rem…...
MATLAB - Gazebo 仿真环境
系列文章目录 前言 机器人系统工具箱(Robotics System Toolbox™)为使用 Gazebo 模拟器可视化的模拟环境提供了一个界面。通过 Gazebo,您可以在真实模拟的物理场景中使用机器人进行测试和实验,并获得高质量的图形。 Gazebo 可在…...
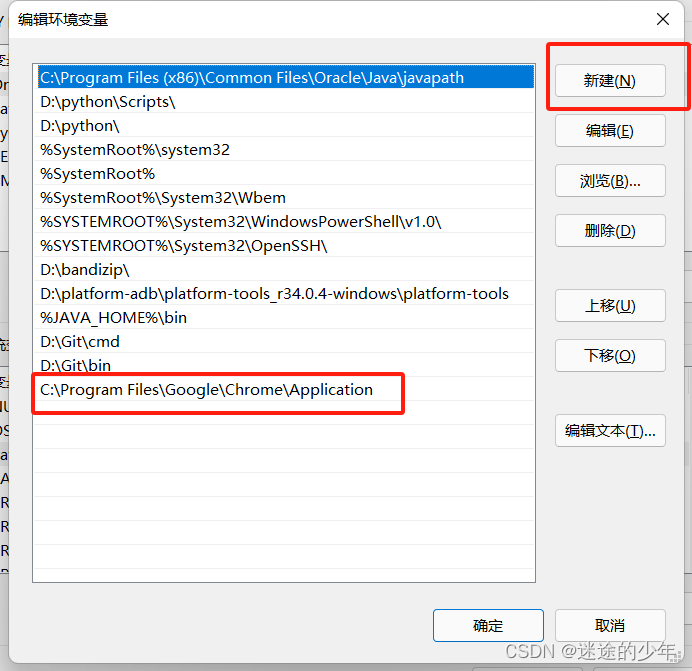
selenium自动化webdriver下载及安装
1、确认浏览器的版本 在浏览器的地址栏,输入chrome://version/,回车后即可查看到对应版本 2、找到对应的chromedriver版本 2.1 114及之前的版本可以通过点击下载chromedriver,根据版本号(只看大版本)下载对应文件 2.2 116版本通过…...
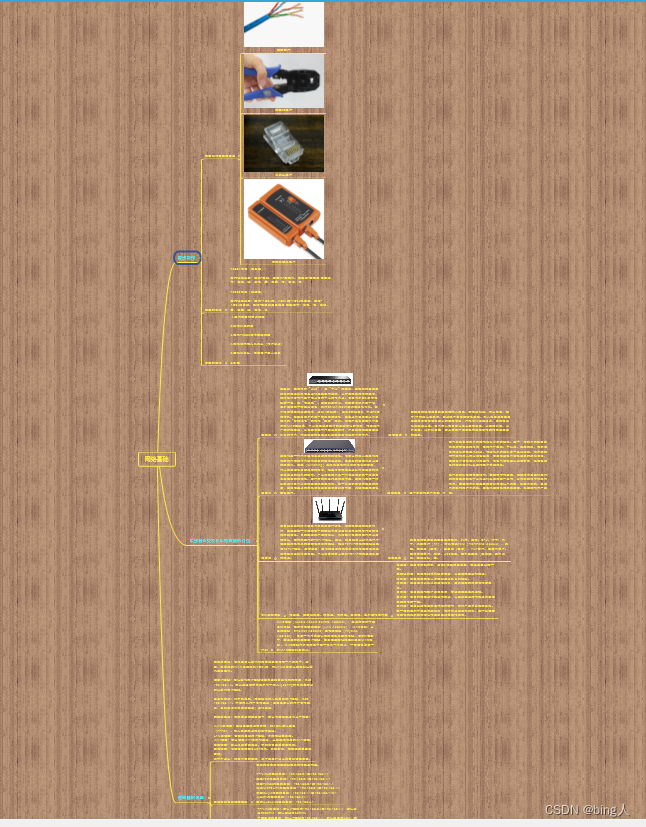
网络基础介绍
1.网线制作 1.1 网线制作需要的工具 网线 网线钳 水晶头 测试仪 编辑 1.2 网线的标准 1.3 网线的做法 2.集线器&交换机&路由器的介绍 3.OSI七层模型 4.路由器的设置 4.1 常见的路由器设置地址 4.2 常见的路由器账号密码 4.3 登录路由器 设置访客网…...

Java中四种引用类型(强、软、弱、虚)
目录 引言 强引用(Strong References) 软引用(Soft References) 弱引用(Weak References) 虚引用(Phantom References) 引用类型的应用场景 总结 引言 Java中的引用类型是管理…...
【MyBatis学习笔记】MyBatis基础学习
MyBatis基础 MyBatis简介MyBatis特性MyBatis下载和其他持久化层技术对比 核心配置文件详解默认的类型别名 搭建MyBatis开发环境创建maven工程创建MyBatis的核心配置文件创建mapper接口创建MyBatis的映射文件通过junit测试功能加入log4j日志功能 MyBatis获取参数值的两种方式&am…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...

隧道裂缝剥落病害AI识别系统
我国现有公路隧道超2.5万座,总里程超2.8万公里,其中运营超过15年的老旧隧道占比达35%。据交通运输部2025年统计,年均因隧道结构病害导致的交通中断超1200次,直接经济损失超45亿元。传统检测模式暴露四大核心痛点:检测周…...

AMLP框架实战:基于MACE构建高精度机器学习势函数
1. 项目概述:当机器学习势函数遇上自动化管道在计算化学和材料科学领域,我们长久以来面临着一个核心矛盾:精度与效率的权衡。密度泛函理论(DFT)能提供接近实验的精度,但计算成本高昂,通常只能处…...
)
ParaView时间戳设置全攻略:从基础标注到自定义格式(5.8.0实测)
ParaView时间戳设置全攻略:从基础标注到自定义格式(5.8.0实测) 在科学可视化领域,时间戳不仅是数据演变的见证者,更是研究成果呈现的专业语言。ParaView作为开源可视化工具链的标杆,其时间标注功能在学术论…...

高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析
高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析 【免费下载链接】srs-windows 项目地址: https://gitcode.com/gh_mirrors/sr/srs-windows 在Windows平台上构建专业级流媒体服务系统,需要综合考虑协议兼容性、性能优化和部署架…...

基于ATmega2560与ISD1700的智能语音时钟:硬件选型、软件架构与避坑指南
1. 项目概述与核心价值去年折腾那个用ATMega328驱动三块显示屏的时钟时,我主要精力都花在了如何在320x240的TFT屏幕上把时间、日期和图标画得又准又好看上。项目在《Elektor》杂志上发表后,一位热心的读者给我提了个新想法:能不能做个会“说话…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

MySQL GROUP BY 原理与优化
我刚工作的时候,有次统计每个用户的订单总金额,写了 SELECT user_id, SUM(amount) FROM orders GROUP BY user_id,结果执行了 60 秒还没出结果。DBA 帮我一看执行计划,发现没走索引,导致 Using temporary(用…...

AI圈神秘领袖Ilya一幅画引爆全网,OpenAI三件大事暗示AGI时代将至?
AI圈神秘精神领袖Ilya在Instagram上传一幅画引发疯狂解读,与此同时,OpenAI连续公布数学成果、升级Codex、筹备IPO,释放AGI到来的强烈信号。Ilya画作引猜测Ilya上传的画中,罗丹的「思考者」踩在芯片Die Shot上,右下角签…...
原理与ScalableHD架构优化实践)
超维计算(HDC)原理与ScalableHD架构优化实践
1. 超维计算(HDC)基础解析超维计算(Hyperdimensional Computing, HDC)是一种受大脑信息处理机制启发的计算范式,其核心思想是用高维随机向量(通常称为超向量或HV)来表示和处理信息。与传统神经网…...