基于单片机设计的电子指南针(LSM303DLH模块(三轴磁场 + 三轴加速度)
一、前言
本项目是基于单片机设计的电子指南针,主要利用STC89C52作为主控芯片和LSM303DLH模块作为指南针模块。通过LCD1602液晶显示屏来展示检测到的指南针信息。
在日常生活中,指南针是一种非常实用的工具,可以帮助我们确定方向,特别是在户外探险、航海、定位等场景中。传统的磁罗盘指南针存在一些不便之处,如体积较大、不易携带、容易受到外界干扰等。设计一款基于单片机的电子指南针是比较有意义的项目。
为了实现这个项目,选择了STC89C52作为主控芯片。STC89C52是一款功能强大且成本较低的单片机,具有丰富的接口和强大的处理能力,非常适合用于嵌入式应用。同时,为了获得准确的指南针数据,采用了LSM303DLH模块作为指南针模块。该模块集成了三轴磁场传感器和三轴加速度传感器,能够提供高精度和稳定的指南针数据。
在项目的具体实现中,通过STC89C52与LSM303DLH模块进行通信,获取指南针传感器的原始数据。对这些原始数据进行处理和计算,通过磁场数据确定方向,并结合加速度数据来提高测量的准确性。最后,将计算得到的指南针信息通过LCD1602液晶显示屏展示出来,用户可以直观地查看当前的方向。
通过该电子指南针,用户可以方便地获得当前的方向信息,无论是在户外旅行、徒步探险还是其他需要导航的场景中,都能提供实时准确的方向指引。该项目不仅具有一定的技术挑战性,也能为用户带来便利和实用性。


二、项目设计过程
本项目的硬件模块接线、硬件设计思路以及软件设计思路如下:
2.1 硬件模块接线
(1)将STC89C52的VCC引脚连接到电源正极,将GND引脚连接到电源负极。
(2)将LSM303DLH模块的VCC引脚连接到电源正极,将GND引脚连接到电源负极。
(3)将LSM303DLH模块的SCL引脚连接到STC89C52的P2.0引脚,作为I2C的串行时钟线。
(4)将LSM303DLH模块的SDA引脚连接到STC89C52的P2.1引脚,作为I2C的串行数据线。
(5)将LCD1602液晶显示屏的VCC引脚连接到电源正极,将GND引脚连接到电源负极。
(6)将LCD1602液晶显示屏的RS引脚连接到STC89C52的P0.0引脚,作为指令/数据选择线。
(7)将LCD1602液晶显示屏的RW引脚连接到STC89C52的P0.1引脚,作为读写选择线。
(8)将LCD1602液晶显示屏的E引脚连接到STC89C52的P0.2引脚,作为使能控制线。
(9)将LCD1602液晶显示屏的D0-D7引脚连接到STC89C52的P1口引脚或P3口引脚,作为数据线。
2.2 硬件设计思路
(1)主控芯片选择了STC89C52,其具有丰富的IO口和强大的处理能力,适合用于该项目。
(2)指南针模块采用了LSM303DLH,它集成了磁场和加速度传感器,能够提供准确的指南针数据。
(3)LCD1602液晶显示屏用于显示检测到的指南针信息,在硬件设计中需要连接正确的引脚。
2.3 软件设计思路
(1)在软件设计中,需要配置STC89C52的IO口,以及I2C总线通信。
(2)通过I2C总线与LSM303DLH进行通信,获取指南针模块的原始数据。
(3)对获取的原始数据进行处理和计算,得到当前的指南针信息,确定方向。
(4)将计算得到的指南针信息通过LCD1602液晶显示屏进行显示。
(5)编写相应的函数来实现LCD1602的初始化、显示字符、显示字符串等功能。
(6)通过主循环不断更新指南针信息和LCD1602的显示。
本项目的硬件模块接线涉及到主控芯片、指南针模块和LCD1602液晶显示屏的连接。硬件设计思路是选择适合的芯片和模块,确保正常的数据传输和显示功能。软件设计思路包括配置IO口、I2C通信、数据处理和LCD1602显示功能的实现。通过这些设计,实现了一个基于单片机的电子指南针,并能够通过LCD1602显示屏显示检测到的指南针信息。
三、LSM303DLH 模块介绍
LSM303DLH 是一种集成式数字三轴加速度计和磁力计模块,由STMicroelectronics公司生产。结合了两个传感器,提供了同时测量物体的加速度和磁场的功能。
下面是 LSM303DLH 模块的一些主要特点和功能:
(1)加速度计功能:LSM303DLH 可以测量物体在三个轴向(X、Y 和 Z 轴)上的加速度。它提供了高分辨率的加速度测量范围,通常为 ±2g(重力加速度)至 ±16g。这使得它适用于各种应用,如运动检测、姿态测量和震动监测等。
(2)磁力计功能:LSM303DLH 还具有磁力计功能,可以测量物体周围的磁场。它使用磁阻式传感器来检测磁场的强度和方向,并提供三个轴向上的磁场测量数据。这使得它在指南针导航、地磁定位和磁场检测等应用中非常有用。
(3)数字输出接口:LSM303DLH 通过I2C或SPI接口与主控制器通信。这些数字接口使得与微控制器、单片机或其他数字设备的集成变得简单。
(4)高性能:LSM303DLH 提供高精度和低噪声的测量,以获得准确的加速度和磁场数据。它还具有温度补偿功能,可以提高测量的稳定性和精确性。
(5)低功耗:LSM303DLH 设计为低功耗模式,可以在不太耗电的情况下运行。这对于依靠电池供电的移动设备和便携式应用非常重要。
(6)应用领域:由于 LSM303DLH 模块同时提供了加速度计和磁力计功能,它适用于许多应用领域。例如,它可以用于移动设备中的姿态检测和自动旋转屏幕功能,用于导航系统中的指南针功能,以及用于运动追踪设备中的步数计算和运动分析等。
四、项目代码设计
#include <reg52.h>
#include <intrins.h>// 定义LCD1602引脚连接
sbit RS = P0^0; // 指令/数据选择线
sbit RW = P0^1; // 读写选择线
sbit E = P0^2; // 使能控制线// 定义I2C总线连接
sbit SCL = P2^0; // I2C串行时钟线
sbit SDA = P2^1; // I2C串行数据线// 函数声明
void delay_us(unsigned int us);
void delay_ms(unsigned int ms);void I2C_Start();
void I2C_Stop();
void I2C_Ack();
void I2C_NoAck();
bit I2C_WaitAck();
void I2C_SendByte(unsigned char dat);
unsigned char I2C_ReceiveByte();void LCD_Init();
void LCD_WriteCmd(unsigned char cmd);
void LCD_WriteData(unsigned char dat);
void LCD_SetCursor(unsigned char row, unsigned char col);
void LCD_DisplayString(unsigned char row, unsigned char col, unsigned char *str);void Compass_Init();
unsigned char Compass_Read();
void Compass_Calculate(unsigned char raw_data, unsigned char *heading);// 主函数
int main() {unsigned char heading;unsigned char str[16];LCD_Init();Compass_Init();while(1) {heading = Compass_Read();Compass_Calculate(heading, str);LCD_SetCursor(0, 0);LCD_DisplayString(0, 2, "Compass");LCD_SetCursor(1, 4);LCD_DisplayString(1, 6, str);delay_ms(500);}return 0;
}// 延时函数,微秒级延时
void delay_us(unsigned int us) {while (us--) {_nop_();_nop_();_nop_();_nop_();}
}// 延时函数,毫秒级延时
void delay_ms(unsigned int ms) {while (ms--) {delay_us(1000);}
}// I2C总线开始
void I2C_Start() {SDA = 1;SCL = 1;delay_us(5);SDA = 0;delay_us(5);SCL = 0;
}// I2C总线结束
void I2C_Stop() {SDA = 0;SCL = 1;delay_us(5);SDA = 1;delay_us(5);
}// I2C总线发送应答信号
void I2C_Ack() {SDA = 0;SCL = 1;delay_us(5);SCL = 0;delay_us(5);
}// I2C总线发送不应答信号
void I2C_NoAck() {SDA = 1;SCL = 1;delay_us(5);SCL = 0;delay_us(5);
}// 等待I2C总线应答
bit I2C_WaitAck() {unsigned int i = 500;SDA = 1;SCL = 1;delay_us(1);while (SDA) {if (--i == 0) {I2C_Stop();return 0;}}SCL = 0;return 1;
}// I2C总线发送字节
void I2C_SendByte(unsigned char dat) {unsigned char i;for (i = 0; i < 8; i++) {SDA = dat & 0x80;SCL = 1;delay_us(5);SCL = 0;delay_us(5);dat <<= 1;}
}// I2C总线接收字节
unsigned char I2C_ReceiveByte() {unsigned char i;unsigned char dat = 0;SDA = 1;for (i = 0; i < 8; i++) {dat <<= 1;SCL = 1;delay_us(5);dat |= SDA;SCL = 0;delay_us(5);}return dat;
}// LCD初始化
void LCD_Init() {delay_ms(50);LCD_WriteCmd(0x38);delay_us(50);LCD_WriteCmd(0x0C);delay_us(50);LCD_WriteCmd(0x01);delay_ms(5);
}// LCD写入指令
void LCD_WriteCmd(unsigned char cmd) {RS = 0;RW = 0;P1 = cmd;E = 1;delay_us(5);E = 0;delay_us(5);
}// LCD写入数据
void LCD_WriteData(unsigned char dat) {RS = 1;RW = 0;P1 = dat;E = 1;delay_us(5);E = 0;delay_us(5);
}// LCD设置光标位置
void LCD_SetCursor(unsigned char row, unsigned char col) {unsigned char addr;if (row == 0) {addr = 0x80 + col;}else {addr = 0xC0 + col;}LCD_WriteCmd(addr);delay_us(5);
}// LCD显示字符串
void LCD_DisplayString(unsigned char row, unsigned char col, unsigned char *str) {LCD_SetCursor(row, col);while (*str != '\0') {LCD_WriteData(*str++);delay_us(5);}
}#define LSM303DLH_CTRL_REG1_A 0x20
#define LSM303DLH_OUT_X_H_A 0x29// 指南针初始化
void Compass_Init() {// 设置控制寄存器1,使能XYZ轴加速度计,数据速率=50HzI2C_Start();I2C_SendByte(0x3A); // LSM303DLH的I2C地址,注意写操作要在读写位上加低电平I2C_WaitAck();I2C_SendByte(LSM303DLH_CTRL_REG1_A);I2C_WaitAck();I2C_SendByte(0x27);I2C_WaitAck();I2C_Stop();
}// 读取指南针数据
unsigned char Compass_Read() {unsigned char data;// 读取X轴高位数据寄存器I2C_Start();I2C_SendByte(0x3A);I2C_WaitAck();I2C_SendByte(LSM303DLH_OUT_X_H_A);I2C_WaitAck();I2C_Start();I2C_SendByte(0x3B);I2C_WaitAck();data = I2C_ReceiveByte();I2C_NoAck();I2C_Stop();return data;
}#define LSM303DLH_OUT_X_H_M 0x03
#define LSM303DLH_OUT_Y_H_M 0x05
#define LSM303DLH_OUT_Z_H_M 0x07// 计算指南针方向
void Compass_Calculate(unsigned char *heading) {int x, y, z;// 读取X轴、Y轴和Z轴的磁力计数据I2C_Start();I2C_SendByte(0x3C); // LSM303DLH的I2C地址,注意写操作要在读写位上加低电平I2C_WaitAck();I2C_SendByte(LSM303DLH_OUT_X_H_M);I2C_WaitAck();I2C_Start();I2C_SendByte(0x3D);I2C_WaitAck();x = (I2C_ReceiveByte() << 8) | I2C_ReceiveByte();x = -(x / 16); // 根据实际情况进行校正I2C_NoAck();I2C_Stop();I2C_Start();I2C_SendByte(0x3C);I2C_WaitAck();I2C_SendByte(LSM303DLH_OUT_Y_H_M);I2C_WaitAck();I2C_Start();I2C_SendByte(0x3D);I2C_WaitAck();y = (I2C_ReceiveByte() << 8) | I2C_ReceiveByte();y = -(y / 16); // 根据实际情况进行校正I2C_NoAck();I2C_Stop();I2C_Start();I2C_SendByte(0x3C);I2C_WaitAck();I2C_SendByte(LSM303DLH_OUT_Z_H_M);I2C_WaitAck();I2C_Start();I2C_SendByte(0x3D);I2C_WaitAck();z = (I2C_ReceiveByte() << 8) | I2C_ReceiveByte();z = -(z / 16); // 根据实际情况进行校正I2C_NoAck();I2C_Stop();// 计算方向角度*heading = atan2(y, x) * 180 / PI;if (*heading < 0) {*heading += 360;}
}五、总结
这个项目是基于STC89C52单片机和LSM303DLH模块设计的电子指南针。通过LCD1602显示器,可以实时显示检测到的指南针信息。
使用STC89C52作为主控芯片,搭建了整个系统的基础。通过配置引脚和初始化串口通信等必要的设置,确保单片机与其他硬件模块正常通信。
使用LSM303DLH模块来获取指南针的数据。该模块具有三轴磁场和三轴加速度功能,通过I2C总线与单片机进行通信。我们需要正确配置I2C通信,并实现相应的读取数据的函数。通过读取LSM303DLH模块的磁场数据,可以得到当前的指南针方向。
使用LCD1602显示器来显示指南针信息。通过初始化LCD1602和相应的控制函数,可以将当前的指南针方向以可视化的方式显示在LCD上,使用户能够方便地读取指南针信息。
在整个项目中,需要注意LSM303DLH模块和LCD1602的正确连接,还需要考虑到磁场干扰、数据校准和滤波等问题,以确保指南针的准确性和稳定性。
通过使用STC89C52单片机、LSM303DLH模块和LCD1602显示器,成功地设计并实现了一个电子指南针系统。这个系统可以读取磁场数据并计算出指南针的方向,并将其显示在LCD上,为用户提供了方便和准确的指南针功能。
相关文章:
基于单片机设计的电子指南针(LSM303DLH模块(三轴磁场 + 三轴加速度)
一、前言 本项目是基于单片机设计的电子指南针,主要利用STC89C52作为主控芯片和LSM303DLH模块作为指南针模块。通过LCD1602液晶显示屏来展示检测到的指南针信息。 在日常生活中,指南针是一种非常实用的工具,可以帮助我们确定方向࿰…...

深度学习 该用什么标准判断差异最小
决定差异最小的标准通常依赖于您的具体问题和任务。以下是一些常见的用于评估预测性能的标准和思路: 1. **均方根误差 (RMSE):** RMSE 是预测值和真实值之间差异的平方的平均值的平方根。它对较大的误差更加敏感。 from sklearn.metrics import mean_squared_error…...

汽车制造厂设备故障预测与健康管理PHM
在现代汽车制造工业中,设备的可靠性和稳定性对于保证生产线的高效运行至关重要。为了提高生产效率、降低维修成本以及确保产品质量,汽车制造厂逐渐采用设备故障预测与健康管理(PHM)系统,以实现对设备状态的实时监测和预…...
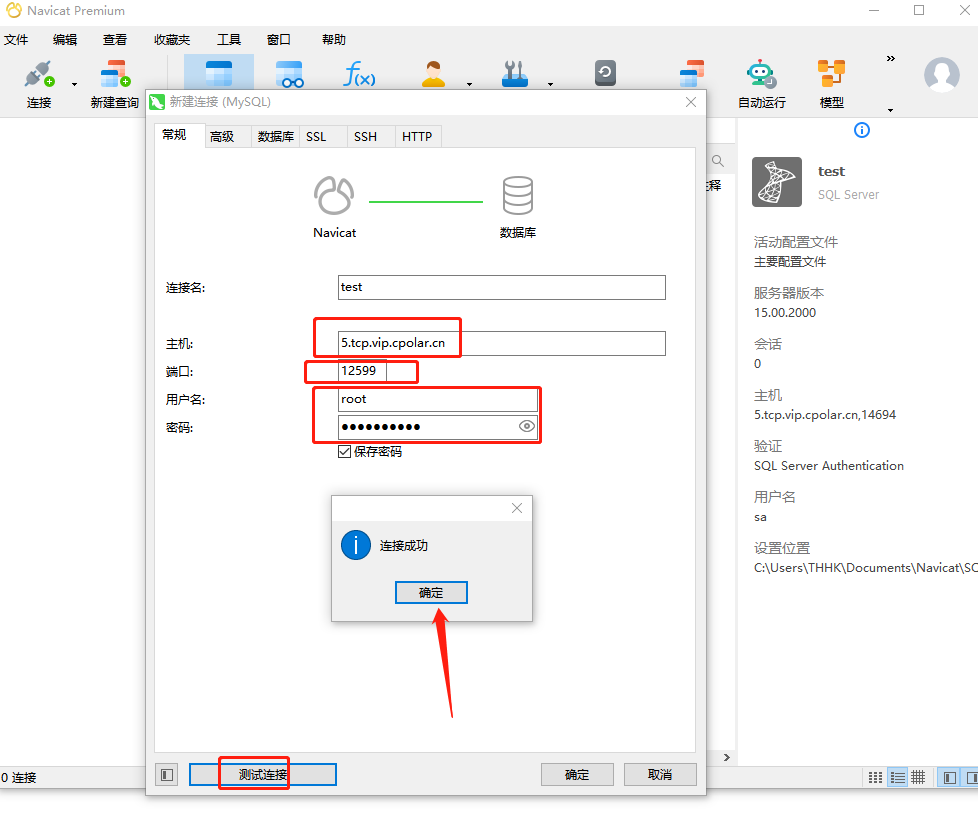
如何通过宝塔面板搭建一个MySQL数据库服务并实现无公网ip远程访问?
文章目录 前言1.Mysql服务安装2.创建数据库3.安装cpolar3.2 创建HTTP隧道 4.远程连接5.固定TCP地址5.1 保留一个固定的公网TCP端口地址5.2 配置固定公网TCP端口地址 前言 宝塔面板的简易操作性,使得运维难度降低,简化了Linux命令行进行繁琐的配置,下面简单几步,通过宝塔面板cp…...

C++ Qt开发:TabWidget实现多窗体功能
Qt 是一个跨平台C图形界面开发库,利用Qt可以快速开发跨平台窗体应用程序,在Qt中我们可以通过拖拽的方式将不同组件放到指定的位置,实现图形化开发极大的方便了开发效率,本章将重点介绍TabWidget标签组件的常用方法及灵活运用。 Q…...

【轻量化篇】YOLOv8改进实战 | 更换主干网络 Backbone 之 RepGhostnet,重参数化实现硬件高效的Ghost模块
YOLOv8专栏导航:点击此处跳转 前言 轻量化网络设计是一种针对移动设备等资源受限环境的深度学习模型设计方法。下面是一些常见的轻量化网络设计方法: 网络剪枝:移除神经网络中冗余的连接和参数,以达到模型压缩和加速的目的。分组卷积:将卷积操作分解为若干个较小的卷积操…...
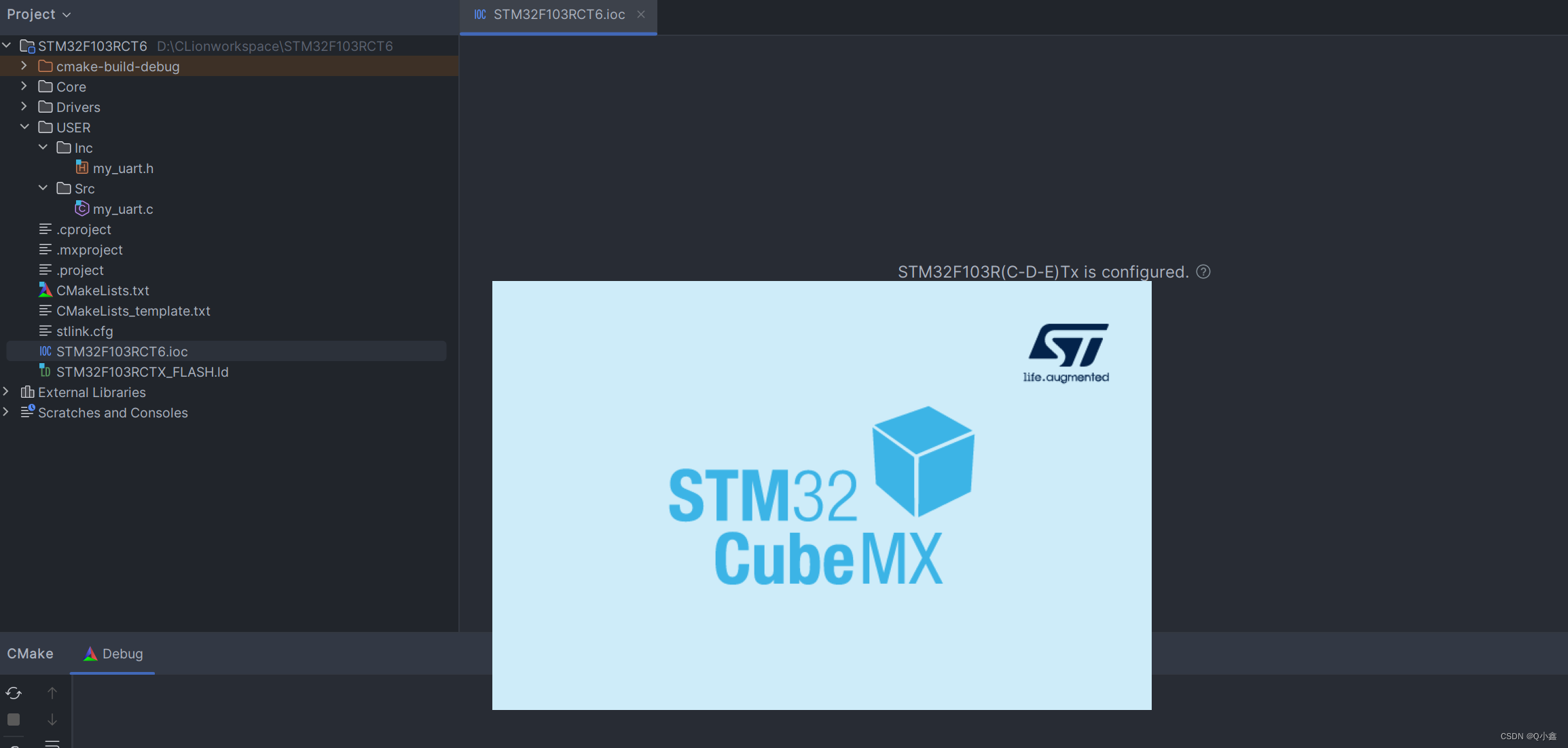
【STM32工具篇】使用CLion开发STM32
本文主要记录使用CLion开发STM32,并调试相关功能 使用的CLion版本:2023.3.1 CLion嵌入式配置教程:STM32CubeMX项目 |CLion 文档 (jetbrains.com) OpenOCD官网下载:Download OpenOCD for Windows (gnutoolchains.com) GNU ARM工…...

elementui中的el-table,当使用fixed属性时,table主体会遮挡住滚动条的大半部分,导致很难选中。
情况: 解决: el-table加个类,这里取为class"table" 然后是样式部分: <style scoped lang"scss"> ::v-deep.table {// 滚动条高度调整::-webkit-scrollbar {height: 15px;}// pointer-events 的基本信…...

鸿蒙端H5容器化建设——JSB通信机制建设
1. 背景 2023年鸿蒙开发者大会上,华为宣布为了应对国外技术封锁的潜在风险,2024年的HarmonyOS NEXT版本中将不再兼容Android,并推出鸿蒙系统以及其自研的开发框架,形成开发生态闭环。同时,在更高维度上华为希望将鸿蒙…...
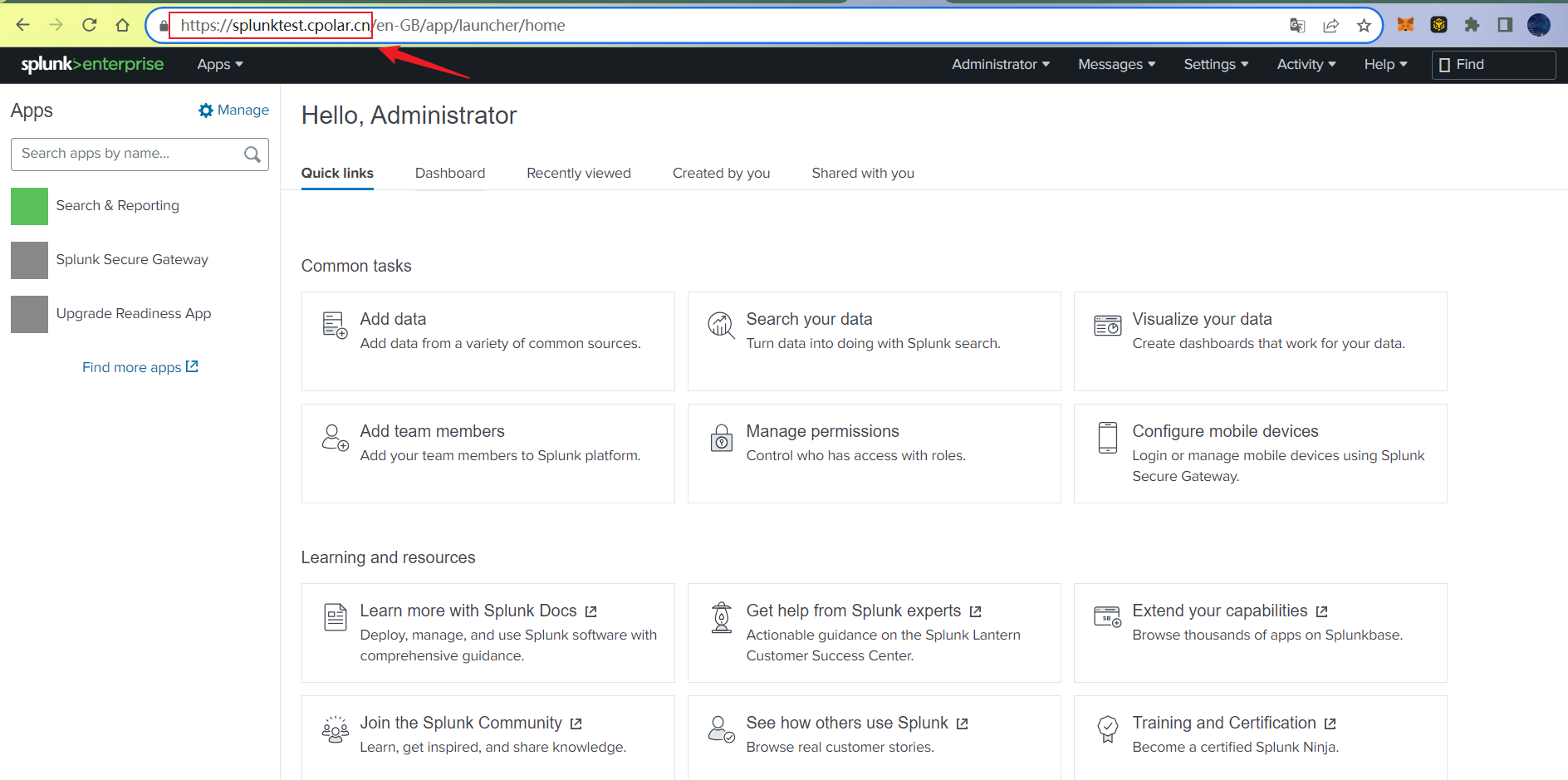
数据管理平台Splunk Enterprise本地部署结合内网穿透实现远程访问
文章目录 前言1. 搭建Splunk Enterprise2. windows 安装 cpolar3. 创建Splunk Enterprise公网访问地址4. 远程访问Splunk Enterprise服务5. 固定远程地址 前言 Splunk Enterprise是一个强大的机器数据管理平台,可帮助客户分析和搜索数据,以及可视化数据…...

MaBatis使用`ResultMap`标签手动映射详解使用
文章目录 MaBatis使用ResultMap标签手动映射详解使用1、MyBatis只能自动维护库表”列名“与”属性名“相同时的对应关系,二者不同时无法自动ORM,如下:2、在SQL中使用 as 为查询字段添加列别名,以匹配属性名:但是如果我…...

openstack-keystone服务
文章目录 keystone服务安装和配置先决条件安装并配置组件运行以下命令来安装包。编辑文件 /etc/keystone/keystone.conf 并完成如下动作:初始化身份认证服务的数据库:初始化Fernet keys:Bootstrap the Identity service: 配置 Apache HTTP 服…...

大数据HCIE成神之路之数据预处理(3)——数值离散化
数值离散化 1.1 无监督连续变量的离散化 – 聚类划分1.1.1 实验任务1.1.1.1 实验背景1.1.1.2 实验目标1.1.1.3 实验数据解析 1.1.2 实验思路1.1.3 实验操作步骤1.1.4 结果验证 1.2 无监督连续变量的离散化 – 等宽划分1.2.1 实验任务1.2.1.1 实验背景1.2.1.2 实验目标1.2.1.3 实…...
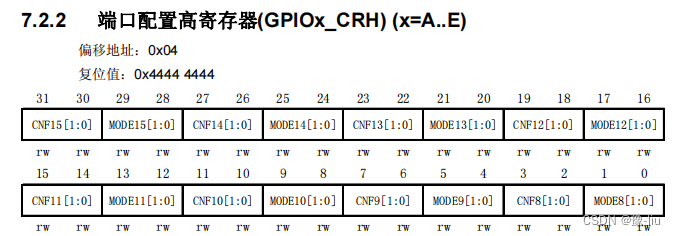
stm32 寄存器、地址、位带操作
存储器区域功能划分 4GB 的地址空间中,ARM 已经粗线条的平均分成了 8 个块,每块 512MB,每个块也都规定了用途,具体分类见表格 6-1。每个块的大小都有 512MB,显然这是非常大的,芯片厂商在每个块的范围内设计…...
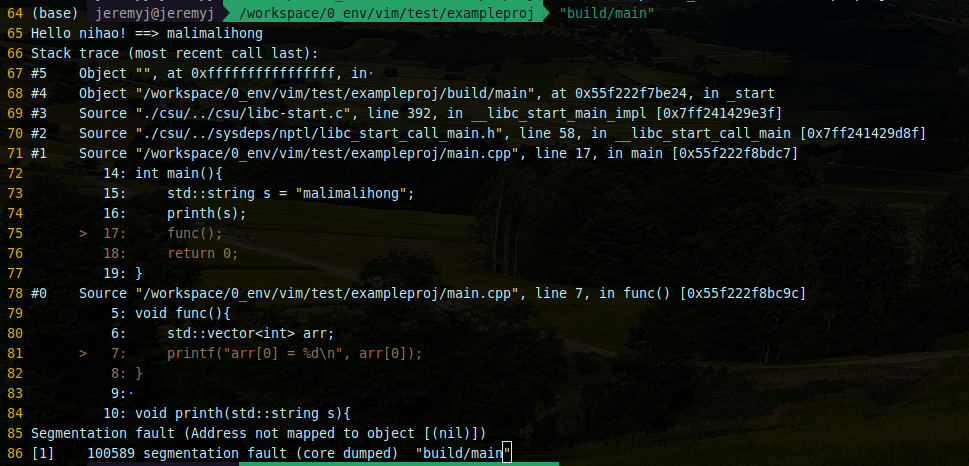
记录 | gdb使用backward-cpp来美化调试log
# 在当前工程目录下 git clone https://github.com/bombela/backward-cpp.git 编辑CMakeList.txt cmake_minimum_required(VERSION 3.15)project(exampleproj LANGUAGES CXX)add_subdirectory(backward-cpp)add_executable(main main.cpp)target_sources(main PUBLIC ${BACKW…...
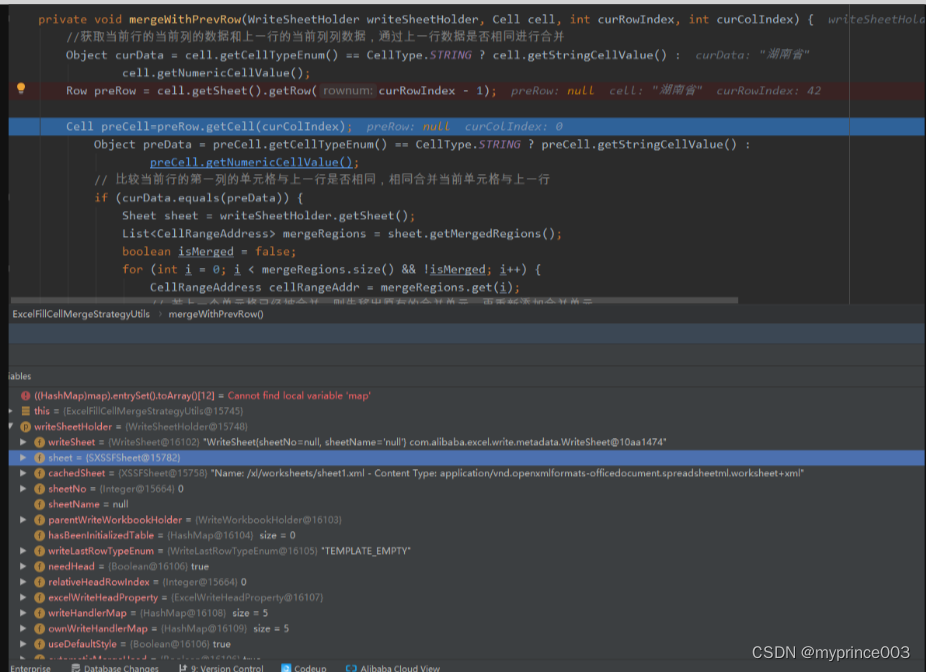
EasyExcel模板导出(行和列自动合并)
1.需求背景: ①需要从第三方获取数据,第三方接口有两个参数,开始时间和结束时间 ②获取回来的数据并没有入库,所以不能通过数据库将数据归类统计,excel合并大概的流程是判断上一行或者左右相邻列是否相同,然后进行合并,所以不能是零散的数据且客户要求每一个自治区和每一个航站…...

EOCR-i3MZ/iFMZ施耐德漏电保护继电器产品简介
EOCR-i3MZ/iFMZ是施耐德EOCR的新一代电子式电动机保护器产品,具有过电流、欠电流、缺相、逆相、堵转、失速、三相不平衡、接地等保护功能。EOCR-i3MZ/iFMZ是通讯型产品,提供Modbus RTU通讯协议,RS485接口。 为方便设备维护人员排查电动机的故…...

golang开发--beego入门
Beego 是一个基于 Go 语言的开源框架,用于构建 Web 应用程序和 API。它采用了一些常见的设计模式,以提高开发效率、代码可维护性和可扩展性。 一,MVC设计模式 Beego 框架采用了经典的 MVC(Model-View-Controller)设计…...

python调取一欧易API并写一个比特币均线交易策略
比特币均线交易策略是一种基于比特币价格的移动均线的交易策略。它通过计算不同时间段的移动均线来确定买入和卖出点。 具体步骤如下: 确定要使用的均线。常用的均线包括5日、10日、20日、50日和200日均线。较短的均线可以更快地反应价格变动,而较长的均…...

使用arthas排查请求超时问题
现象 客户端调用服务时间出现偶尔超时现象 排查 因为服务已开启arthas,使用trace命令监控 $ trace com.lizz slowfun #cost > 1000 -n 10 监控com.lizz类中的slowfun方法,输出用时超过1000ms的记录,记录10条 Press CtrlC to abort. Aff…...

Elasticsearch实战:从索引设计到性能优化的完整指南
Elasticsearch实战:从索引设计到性能优化的完整指南 大家好,我是迪哥。Elasticsearch 是我们系统的核心搜索组件,从商品搜索到日志分析,从全文检索到聚合分析,它无处不在。今天就聊聊 ES 的索引设计和性能优化经验。 索…...
)
一文读懂添加产品展示模块后,但模块不显示产品价格,如何解决(附实操教程)
关于这个问题,很多商家都不太清楚。今天来详细解答。一、问题背景在实际运营小程序商城的过程中,不少商家会遇到:添加产品展示模块后,但模块不显示产品价格,如何解决二、详细解答请按下图操作查看是否未勾选展示的内容…...

AI加速器架构对比:从GPU到专用芯片的性能与能效分析
1. AI加速器架构全景解析:从通用GPU到专用芯片的演进在深度学习计算领域,硬件架构的创新正以前所未有的速度推进。传统GPU凭借其强大的并行计算能力长期占据主导地位,但随着模型规模的指数级增长和能效要求的不断提高,各类专用AI加…...

Bonsai工具库:函数式编程与代码设计模式实战解析
1. 项目概述:当代码遇见禅意最近在GitHub上闲逛,发现一个挺有意思的项目,叫sauravpanda/bonsai。光看名字,你可能以为这是个园艺或者艺术相关的仓库,但实际上,它是一个非常精巧的编程工具库。这个项目名“B…...

基于Qt与STM32的跨平台遥控小车调试助手设计与实现
1. 项目背景与需求分析 遥控小车作为嵌入式开发的经典项目,调试环节往往是最耗时的部分。传统调试方式需要反复修改下位机代码、烧录固件、观察串口打印数据,整个过程效率低下。我在实际项目中就遇到过这样的困扰:每次调整PID参数都要重新编译…...

20 - 告别“无限上下文”的幻觉:大模型知识注入的“四层矩阵”与下一场权重战争
本专题系列文章共 21 篇,前 5 篇限时免费阅读 01 - 眩晕时代的定海神针:大模型落地的“第一性原理”与算力丰裕悖论 02 - 95%的AI投资打了水漂:五大错配如何扼杀你的“第二增长曲线” 03 - 从电力到AI:标准化已死,个性化永生——大模型时代的三大商业终局 04 - 你的护城…...

工程师如何运用专业技能参与人道主义项目:从思维转变到实践落地
1. 项目概述:工程师的人道主义行动倡议每年8月19日,世界人道主义日都会提醒我们关注那些在全球最艰苦、最危险地区默默奉献的人们。这个日子最初是为了纪念在履职中牺牲的人道主义工作者,如今已演变为一个更广泛的号召——庆祝那种激励全球人…...

智能体架构实战:从LangGraph状态机到多智能体协作
1. 从理论到实践:为什么我们需要一个“智能体架构大全”项目如果你在过去一年里关注过AI领域,尤其是大语言模型的应用开发,那么“智能体”这个词一定已经听得耳朵起茧了。从能帮你写代码的Devin,到能自主完成复杂任务的GPT-4o&…...

VCF 9.1 新特性:安装器与 Fleet Depot 支持 HTTP 无认证离线软件源
VMware Cloud Foundation(VCF)9.0 推出了统一软件仓库(Software Depot),支持连接博通在线源或企业内部离线源。但在 9.0 中,离线源默认必须使用 HTTPS 基础认证,即使关闭 HTTPS 也依然需要认证,对纯内网环境很不友好。在 VCF 9.1…...

视频字幕提取神器:如何让AI帮你自动转录硬字幕?
视频字幕提取神器:如何让AI帮你自动转录硬字幕? 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕区域检测、字…...