【Prometheus|报错】Out of bounds
【背景】进入Prometheus地址的9090端口,pushgateway(0/1)error : out of bounds

【排查分析】
1、out of bounds报错,是由于Prometheus向tsdb存数据出错,与最新存数据的时间序列有问题,有可能当前时间与最新存放数据时间小;
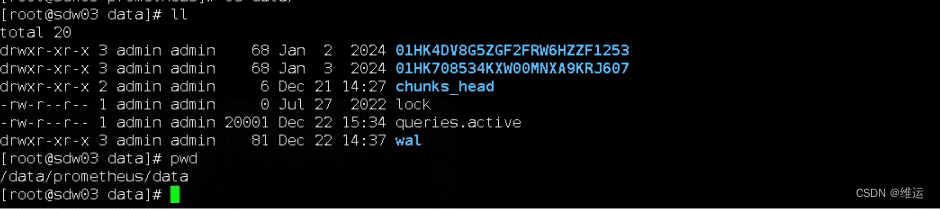
2、去Prometheus存放的数据目录查看,存储的数据为2024年,而当前时间为2023年;
3、最后得知是人为导致,修改Prometheus节点时间为2024年,过了几个小时,又修改为2023年。如果改了时间为2024年,获取数据正常,最多采集数据为no data的问题,如果此时改为2023年,此时最近存放数据的时间序列大于当前存放数据序列,不满足tsdb递增时间序列,报出“Out of bounds”
【解决方案】
删掉数据(rm -rf /data/prometheus/data/* ),重启prometheus,保证当前时间序列大于最近一次存储数据的数据序列。
相关文章:
【Prometheus|报错】Out of bounds
【背景】进入Prometheus地址的9090端口,pushgateway(0/1)error : out of bounds 【排查分析】 1、out of bounds报错,是由于Prometheus向tsdb存数据出错,与最新存数据的时间序列有问题,有可能当前时间与最…...
【音视频】Mesh、Mcu、SFU三种框架的总结
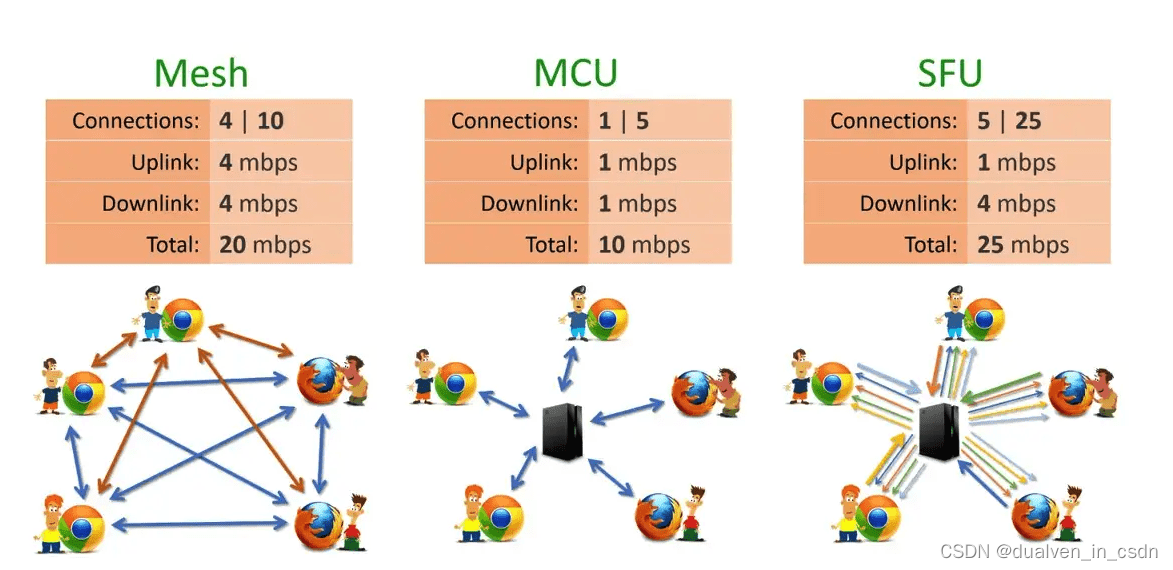
目录 三种网络场景介绍 【Mesh】 【MCU】(MultiPoint Control Unit) 【SFU】(Selective Forwarding Unit) 三种网络架构的优缺点 Mesh架构 MCU架构(MultiPoint Control Unit) SFU架构(Selective Forwarding Unit) 总结 参考文章 三种网络场景介绍 【Mesh】 Mesh架构…...
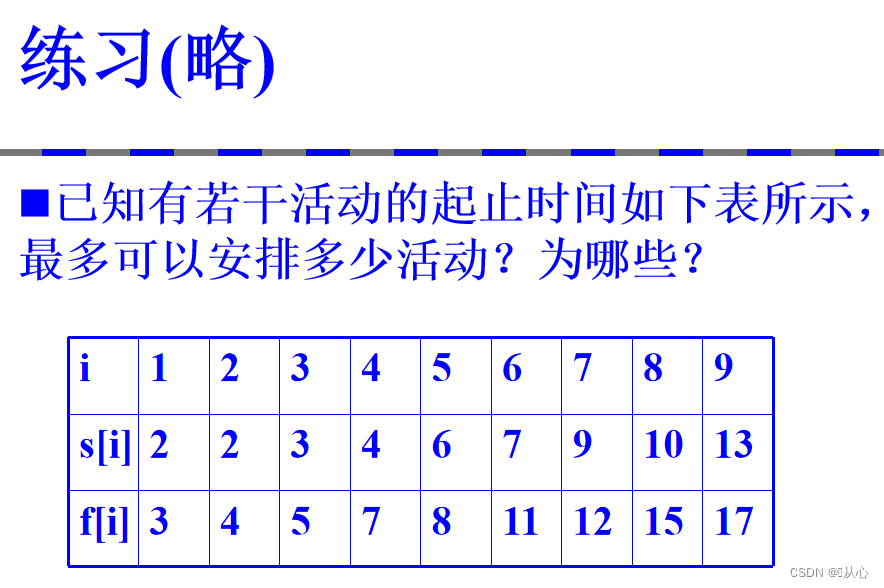
高级算法设计与分析(四) -- 贪心算法
系列文章目录 高级算法设计与分析(一) -- 算法引论 高级算法设计与分析(二) -- 递归与分治策略 高级算法设计与分析(三) -- 动态规划 高级算法设计与分析(四) -- 贪心算法 高级…...
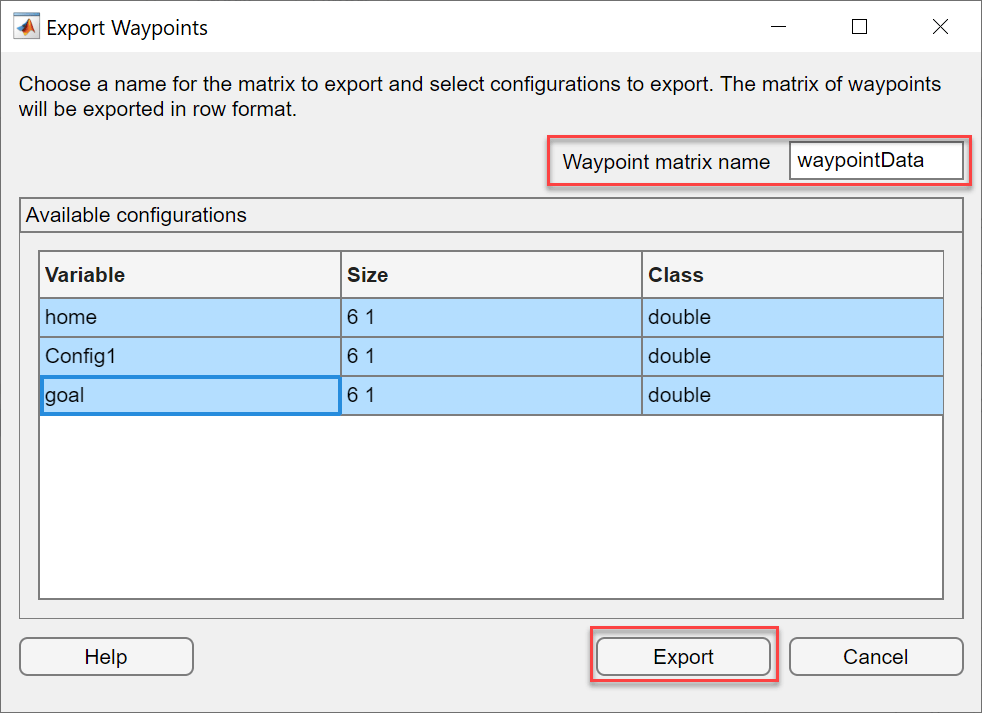
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介 通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆…...
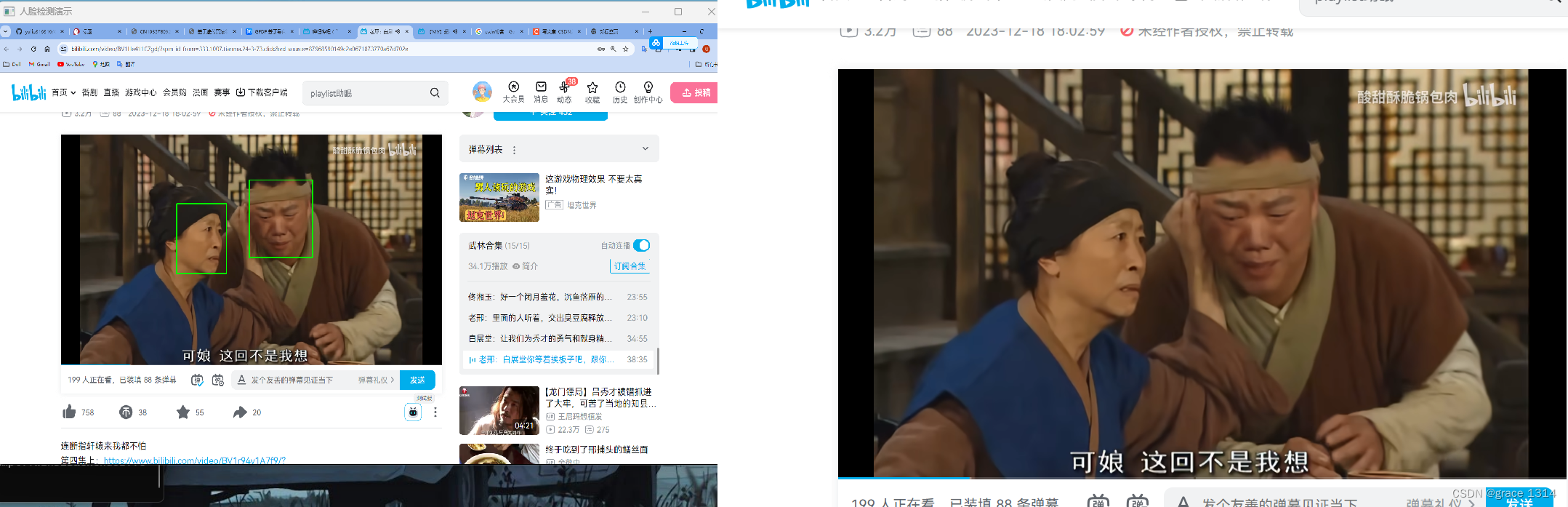
使用OpenCV DNN模块进行人脸检测
内容的一部分来源于贾志刚的《opencv4应用开发、入门、进阶与工程化实践》。这本书我大概看了一下,也就后面几章比较感兴趣,但是内容很少,并没有想像的那种充实。不过学习还是要学习的。 在实际工程项目中,并不是说我们将神经网络…...

C#中使用OpenCV的常用函数
以下是一些C#中使用OpenCV的常用函数例子: 1. 加载图像: using OpenCvSharp;Mat image Cv2.ImRead("path_to_your_image.jpg", ImreadModes.Color); 2. 显示图像: Cv2.NamedWindow("Image Window", WindowFlags.Nor…...
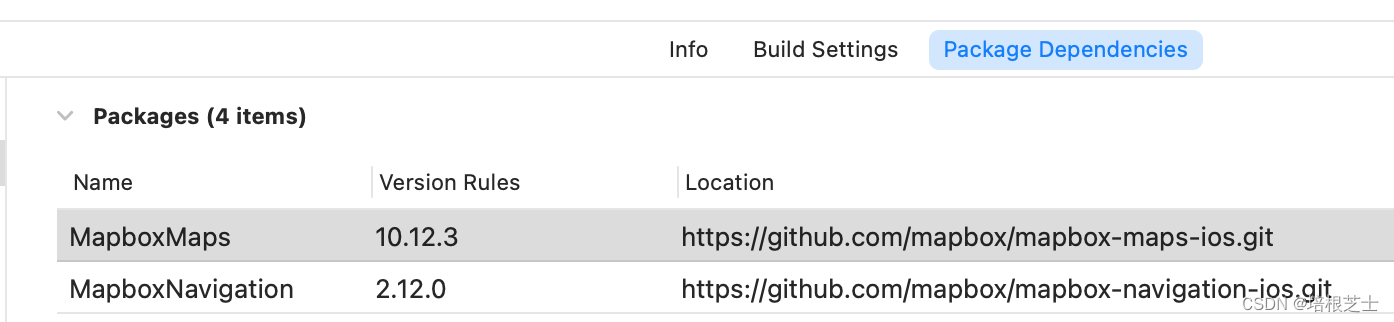
使用Swift Package Manager (SPM)实现xcframework分发
Swift Package Manager (SPM) 是苹果官方提供的用于管理 Swift 项目的依赖关系和构建过程的工具。它是一个集成在 Swift 编程语言中的包管理器,用于解决在开发过程中管理和构建包依赖项的需求。 1、上传xcframework.zip到服务端 压缩xcframeworks成一个zip包&…...
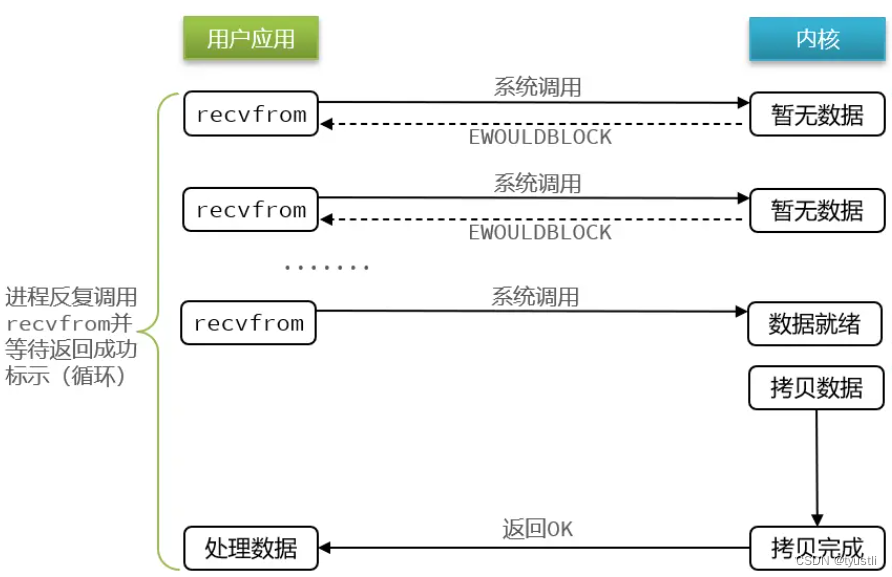
非阻塞 IO(NIO)
文章目录 非阻塞 IO(NIO)模型驱动程序应用程序模块使用 非阻塞 IO(NIO) 上一节中 https://blog.csdn.net/tyustli/article/details/135140523,使用等待队列头实现了阻塞 IO 程序使用时,阻塞 IO 和非阻塞 IO 的区别在于文件打开的时候是否使用了 O_NONB…...

Android应用-flutter使用Positioned将控件定位到底部中间
文章目录 场景描述示例解释 场景描述 要将Positioned定位到屏幕底部中间的位置,你可以使用MediaQuery来获取屏幕的高度,然后设置Positioned的bottom属性和left或right属性,一般我们left和right都会设置一个值让控制置于合适的位置࿰…...
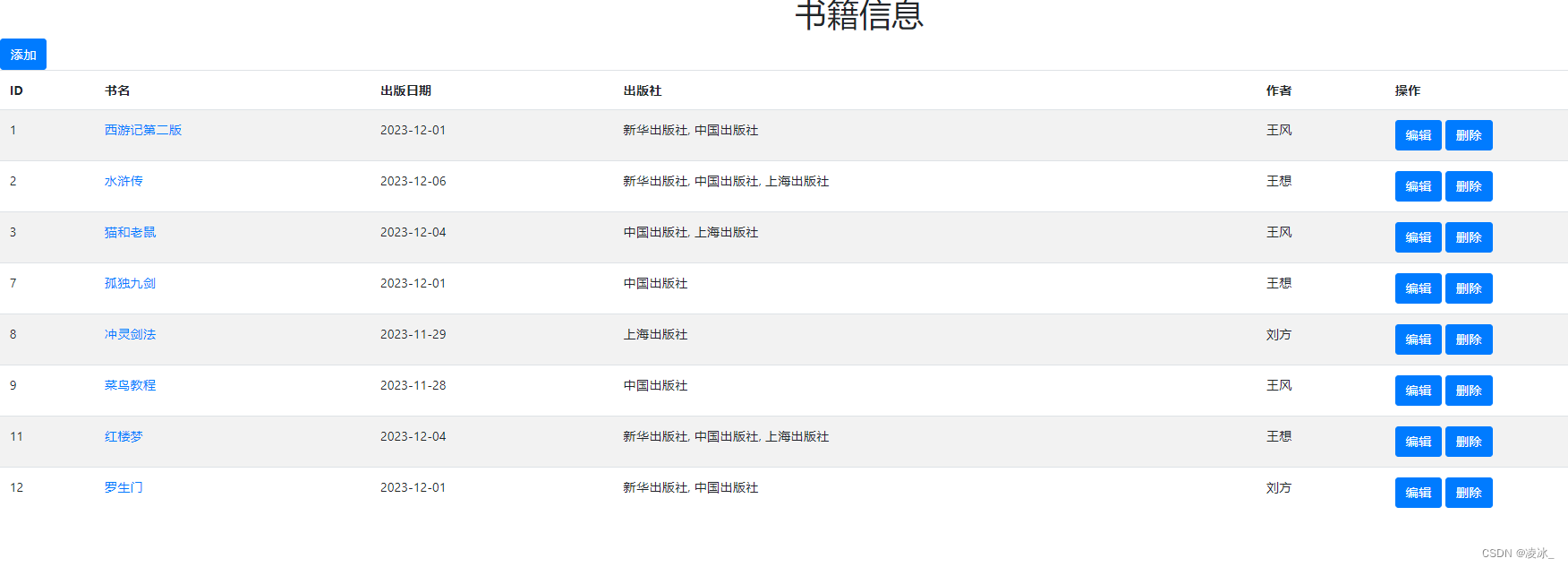
Django 简单图书管理系统
一、图书需求 1. 书籍book_index.html中有超链接:查看所有的书籍列表book_list.html页面 2. 书籍book_list.html中显示所有的书名,有超链接:查看本书籍详情book_detail.html(通过书籍ID)页面 3. 书籍book_detail.html中书的作者和出版社&…...
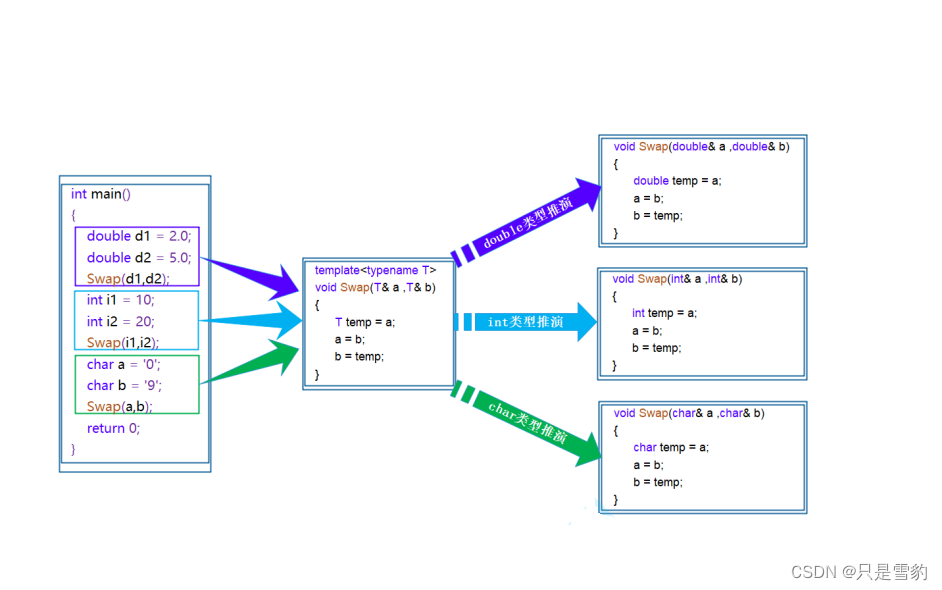
C++内存管理和模板初阶
C/C内存分布 请看代码: int globalVar 1; static int staticGlobalVar 1; void Test() {static int staticVar 1;int localVar 1;int num1[10] { 1, 2, 3, 4 };char char2[] "abcd";const char* pChar3 "abcd";int* ptr1 (int*)mallo…...
分布式对象远程通信)
QtRO(Qt Remote Objects)分布式对象远程通信
一、什么是QtRO Qt Remote Objects(QRO)是Qt提供的一种用于实现远程对象通信的机制。 QtRO支持两种类型的通信:RPC(远程过程调用)和LPC(本地进程通信)。 RPC(远程过程调用…...
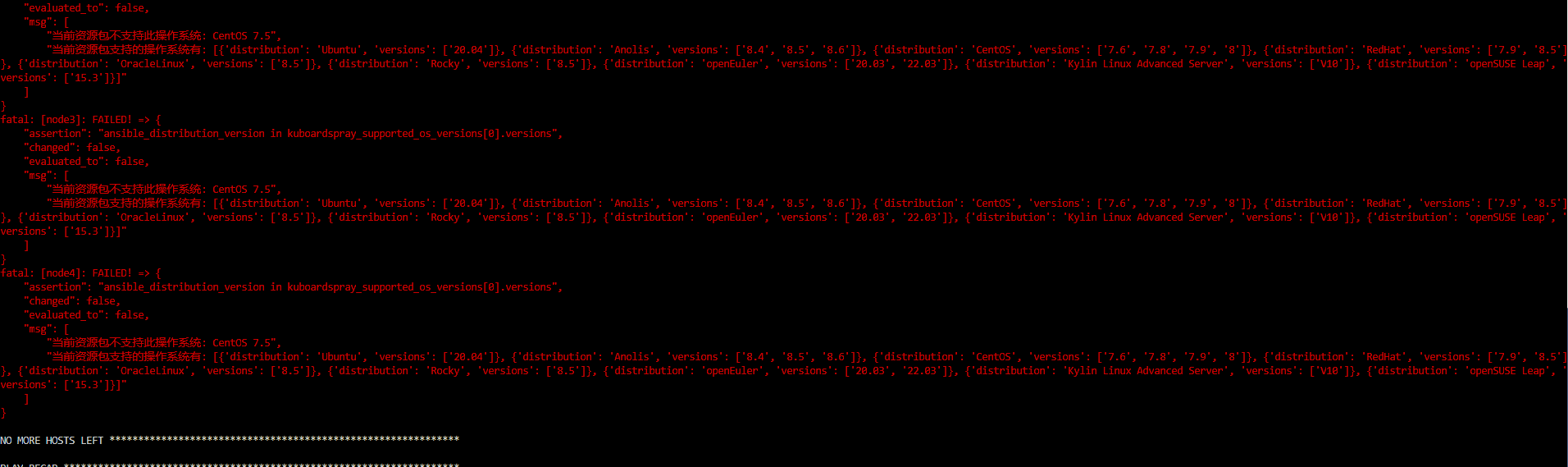
【K8s】1# 使用kuboard-spray安装K8s集群
文章目录 搭建k8s集群1.推荐配置1.1.服务器配置1.2.软件版本 2.使用Kuboard-Spray安装k8s集群2.1.配置要求2.2.操作系统兼容性2.3.安装 Kuboard-Spray2.4.加载离线资源包2.5.规划并安装集群2.6.安装成功2.7.访问集群 3.涉及的命令3.1.linux 4.问题汇总Q1:启动离线集…...

leetCode算法—12. 整数转罗马数字
12. 整数转罗马数字 难度:中等 ** 罗马数字包含以下七种字符: I, V, X, L,C,D 和 M。 字符 数值 I 1 V 5 X 10 L 50 C 100 D 500 M 1000 例如, 罗马数字 2 写做 II ,即…...
使用OpenCV4实现工业缺陷检测的六种方法
目录 1 机器视觉2 缺陷检测3 工业上常见缺陷检测方法 1 机器视觉 机器视觉是使用各种工业相机,结合传感器跟电气信号实现替代传统人工,完成对象识别、计数、测量、缺陷检测、引导定位与抓取等任务。其中工业品的缺陷检测极大的依赖人工完成,…...
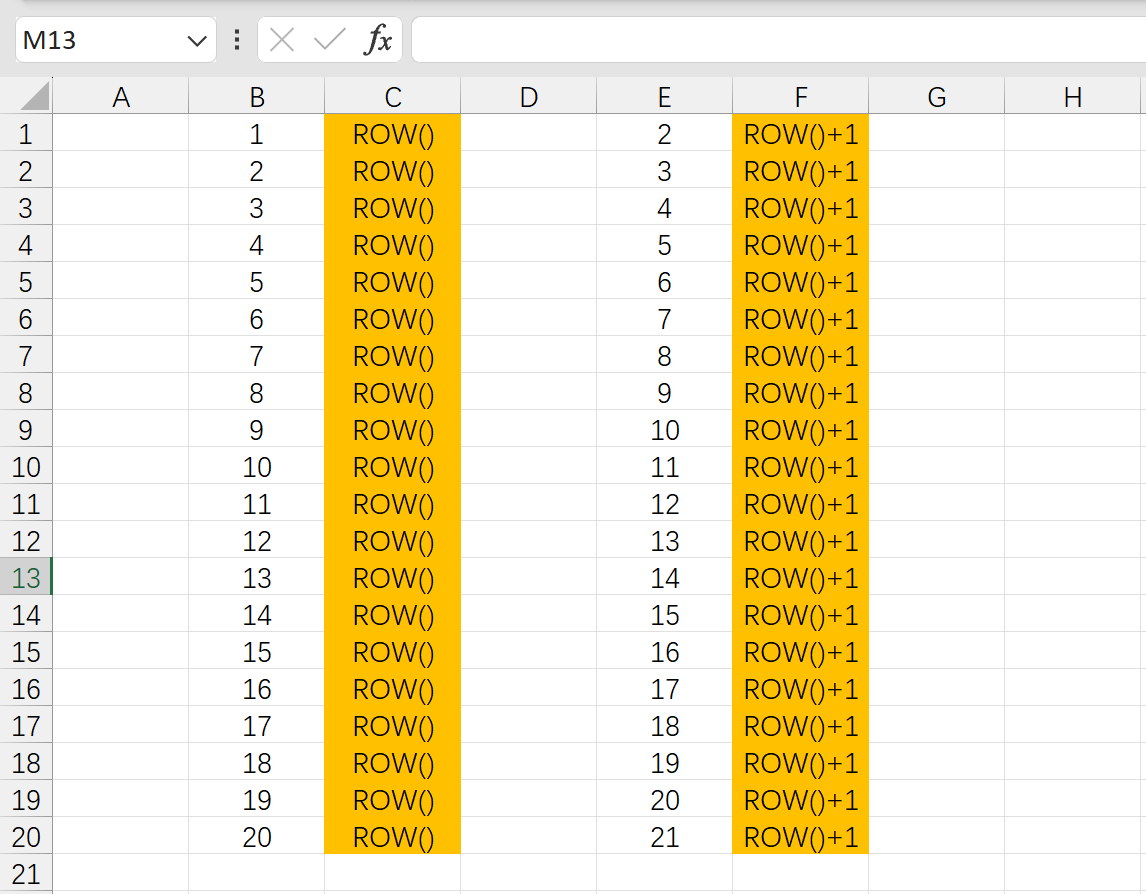
Excel 获取当前行的行数
ROW() 获取当前行 ROW()1 获取当前行然后支持二次开发...

R语言【stringr】——str_detect 检测是否存在字符串的匹配项
Package stringr version 1.5.1 str_detect(string, pattern, negate FALSE) 参数【string】:输入向量。既可以是字符向量,也可以是强制作为一个字符向量。 参数【pattern】:要寻找的模式。默认解释为正则表达式,如 vignette(&…...
【SpringMVC】SpringMVC的请求与响应
文章目录 0. Tomcat环境的配置1. PostMan工具介绍创建WorkSpace建立新的请求 2. 请求映射路径案例结构与代码案例结构案例代码 案例存在问题解决方案方法方法升级版——配置请求路径前缀注解总结 3. Get请求与Post请求案例结构与案例代码案例结构案例代码 Get请求Post请求接收中…...

Spring Boot3通过GraalVM生成exe执行文件
一、安装GraalVM 1、官网:https://www.graalvm.org/downloads/ 2、配置环境变量 2.1、环境变量必须使用JAVA_HOME,否则会出现问题 2.2、在系统变量配置Path,%JAVA_HOME%\bin,注意必须放在顶部第一位 2.3、配置jdk的环境变量,在P…...

【Amazon 实验②】使用缓存策略及源请求策略,用于控制边缘缓存的行为及回源行为
文章目录 1. 了解缓存策略和源请求策略1.1 使用缓存键和缓存策略 实验:使用CloudFront缓存策略和缓存键控制缓存行为 接上一篇文章【Amazon 实验①】使用 Amazon CloudFront加速Web内容分发,我们现在了解和配置如何使用缓存策略及源请求策略,…...

基于PyPortal与CircuitPython的物联网游戏数据显示器开发实战
1. 项目概述 如果你和我一样,既是《英雄联盟》的忠实玩家,又对嵌入式硬件开发充满热情,那么把这两者结合起来,做一个能实时展示自己召唤师等级的“实体奖杯”,绝对是一件既酷又有成就感的事情。这个项目就是基于Adafr…...

Vibe Coding Playbook:从环境到心流,打造高效愉悦的编程系统
1. 项目概述:一个关于“氛围感编程”的实践指南最近在GitHub上看到一个挺有意思的项目,叫“Vibe Coding Playbook”。乍一看这个标题,可能会有点摸不着头脑——“Vibe Coding”是什么?是某种新的编程范式吗?还是某种神…...

Legacy-iOS-Kit完整指南:如何让老旧iPhone和iPad重获新生
Legacy-iOS-Kit完整指南:如何让老旧iPhone和iPad重获新生 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...

基于BLE HID与旋转编码器打造双模式无线遥控器
1. 项目概述你有没有过这样的时刻:窝在沙发里看剧,想调个音量或者暂停一下,却不得不伸手去够茶几上的键盘或鼠标,打断那份沉浸的惬意?或者,在电脑上回味一些经典老游戏时,觉得用键盘移动、鼠标射…...

【Midjourney图像生成黑科技】:树胶重铬酸盐工艺原理、复刻难点与AI艺术胶片质感还原全流程指南
更多请点击: https://intelliparadigm.com 第一章:树胶重铬酸盐工艺的历史溯源与数字时代复兴意义 树胶重铬酸盐工艺(Gum Bichromate Process)诞生于19世纪中叶,是人类最早实现光敏图像复制的化学摄影术之一。其核心原…...

终极指南:5分钟掌握League Akari英雄联盟工具箱的强大功能
终极指南:5分钟掌握League Akari英雄联盟工具箱的强大功能 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League Akari是一款基于…...

嵌入式事件驱动框架Curtroller:模块化设计提升开发效率
1. 项目概述与核心价值最近在嵌入式开发社区里,一个名为“Curtroller”的项目引起了我的注意。这个项目由开发者KenWuqianghao在GitHub上开源,名字本身就是一个巧妙的组合——“Curt”(可能是“Current”电流的缩写或“Control”控制的变体&a…...

DeepMind Lab:强化学习研究的3D视觉仿真平台搭建与实战指南
1. 项目概述:一个被低估的强化学习研究“健身房”如果你在深度强化学习(Deep Reinforcement Learning, DRL)这个圈子里待过一段时间,或者正试图入门,那么你大概率听说过OpenAI的Gym、Unity的ML-Agents,甚至…...

GPU Burn压力测试实战指南:企业级GPU稳定性验证解决方案
GPU Burn压力测试实战指南:企业级GPU稳定性验证解决方案 【免费下载链接】gpu-burn Multi-GPU CUDA stress test 项目地址: https://gitcode.com/gh_mirrors/gp/gpu-burn 在当今高性能计算和人工智能应用日益普及的背景下,GPU稳定性已成为企业数据…...

源代码论文分享|基于Spring Boot的装饰工程管理系统!
做工程管理系统的同学,真的别一开始就硬啃空白项目。 尤其是装饰工程这种题目,看起来只是“管理系统”,但真写起来会发现:客户信息、工程项目、材料、施工进度、人员安排、费用统计……每一块都能展开。如果没有一个完整项目做参…...