C#上位机与欧姆龙PLC的通信05---- HostLink协议
1、介绍
Hostlink协议是欧姆龙PLC与上位机链接的公开协议。上位机通过发送Hostlink命令,可以对PLC进行I/O读写、可以对PLC进行I/O读写、改变操作模式、强制置位/复位等操作。由于是公开协议,即便是非欧姆龙的上位设备(软件),都可以通过该协议和欧姆龙PLC实现通信链接,
Hostlink通讯协议有两种模式:C-mode和FINS
1.Cmode:专用于hostlink通讯指令,采用的是ASCII码,适用于所有OMRON的PLC通讯。只能上位机发出指令给CPU,CPU无法主动发数据给上位机。
2.FINS:采用的二进制码,适用于新开发的PLC,可用在多种网络设备(Controller Link, Ethernet, etc),可被 CPU、IO模块、上位机主动发出,不同的指令分别适用于不同的信息接受单元。有两种链接协议:CMND和hostlink,当上位机是做发送源时,必须采用hostlink协议。
欧姆龙PLC与上位机连接时一般采用的是Hoslink协议,它是一种简易经济的通讯方式,比较适合一台上位机和一台PLC或者多台PLC进行通讯。上位机可对PLC进行程序传送和读写等操作。HOSTLINK系统允许一台上位机通过上位机链接命令向HOSTLINK系统的PLC发送命令,PLC处理来自上位机的每条指令,并把结果传回上位机。
RS-232C链接(1:1)
当使用RS-232C链接时,只可实现1:1的通信,即一台上位机与一台PLC进行通信,最大通信距离不超过15m。
使用PLC自带的口 RS-232C口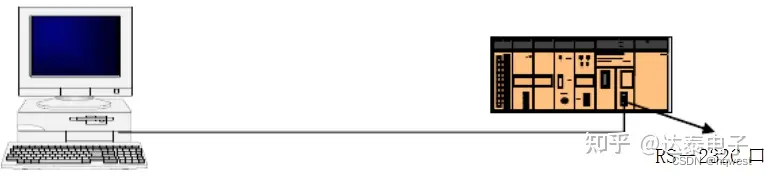
2、如何读懂Hostlink协议格式?
命令格式:
①起始符@,该符号必须置于每个命令的开头;
②节点号即PLC单元号,用于辨识PLC,范围为0~30(BCD数);
③命令符即发送命令的目的,设置2个字符的命令代码;
④操作内容表示命令符操作的参数,命令不同,内容也不一样;
⑤校验符为FCS校验,对校验的内容进行异或运算,结果为2个字符;
⑥结束符为*号+回车键
响应格式
①起始符@,该符号必须置于每个响应的开头;
②节点号表示返回的响应数据PLC的单元号;
③命令符表示本帧返回的是何种命令的响应数据;
④状态符即显示正常或错误的响应结果;
⑤操作内容为根据命令符,返回的响应数据;
⑥FCS校验码
⑦结束符*号+回车键
HostLink通讯协议的数据,由4部分组成。
1. 头代码
2. FINS命令
3. 异或校验
4. 结束码
如:@00FA0000000000101B0006400000175*
数据分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0101-读取命令
B0-存储区代号,B0表示CIO区字,也就是指CIO存储是2进制类型的
006400-起始地址,占3个字节,0064为存储器的编号(16进制的0064为10进制的100) ,后面的00为存储器的位(HEX 00)
0001-数量,占2个字节
75-异或校验
*-固定写法
比如
发送:@00FA000000000010130000000000571*\CR
接收:@00FA004000000001010000010000010142*\CR
发送分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0101-读取命令
30-存储区代号,B0表示CIO区字,也就是指CIO存储是2进制类型的, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
000000-起始地址,占3个字节,0000为存储器的编号,后面的00为存储器的位
0005-数量,占2个字节
71-异或校验
*-固定写法
\CR-回车
接收分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0101-读取命令
0000-错误码,0000表示没有错误,即正常
0100000101-返回的具体数据,占4个字节,分别是01,00,00,01,01即true,false,false,true,true
42-异或校验
*-固定写法
\CR-回车
3、开搞Hostlink
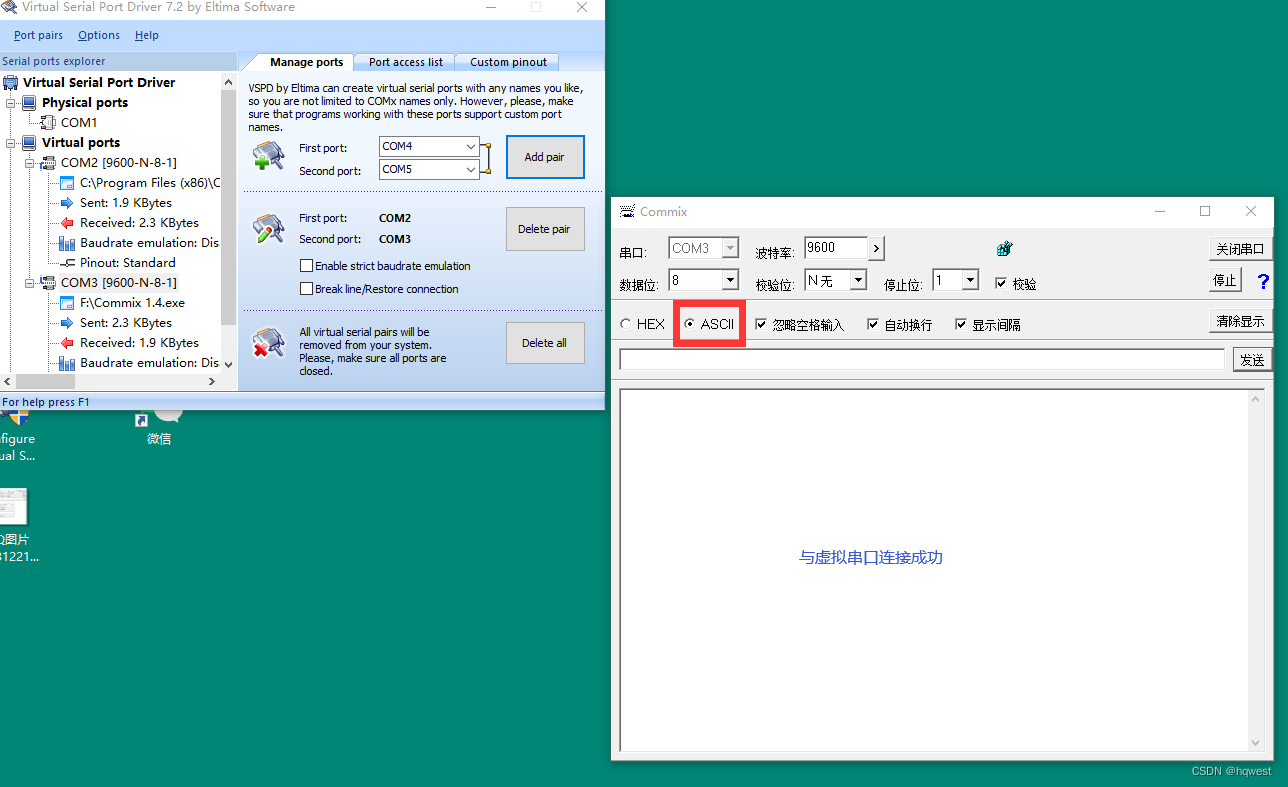
3.1 首先确定设置的是Hostlink协议

3.2 打开Commix 1.4.exe工具软件

3.3 读取和写入CIO数据
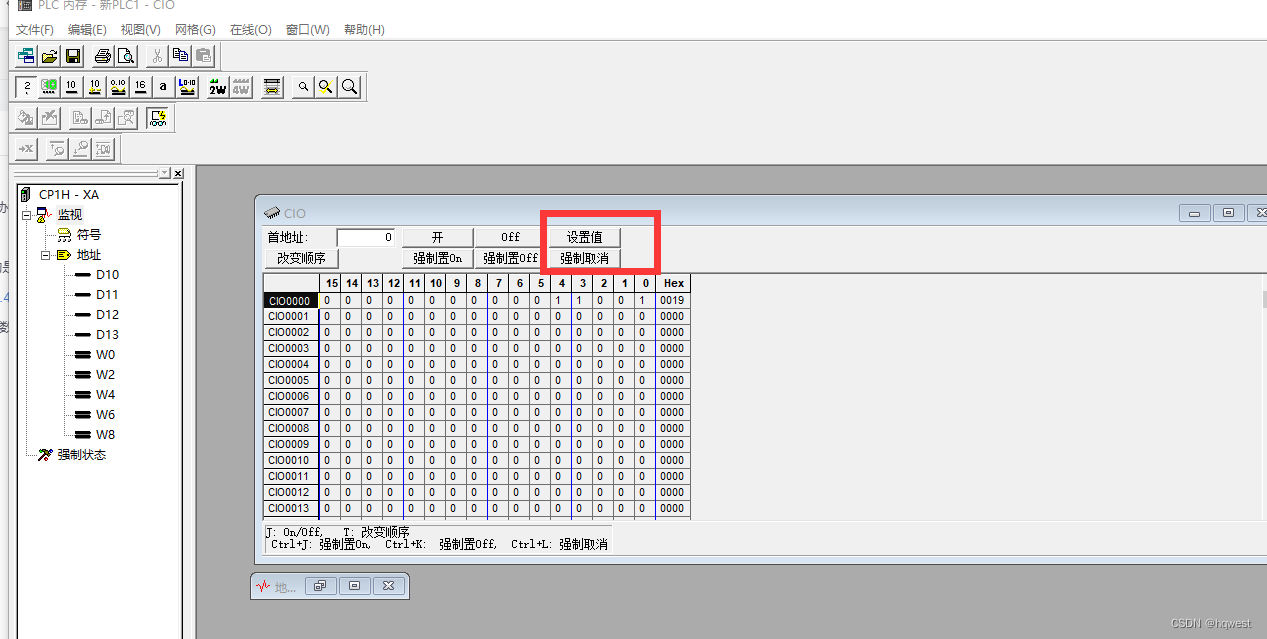
(1)读取CIO0开始的5个字
打开CIO区,设置5个数据,这里是设置0.0,0.1,0.2,0.3,0.4共5个位的数据,分别为10011
发送指令 @00FA0000000000101300000000005
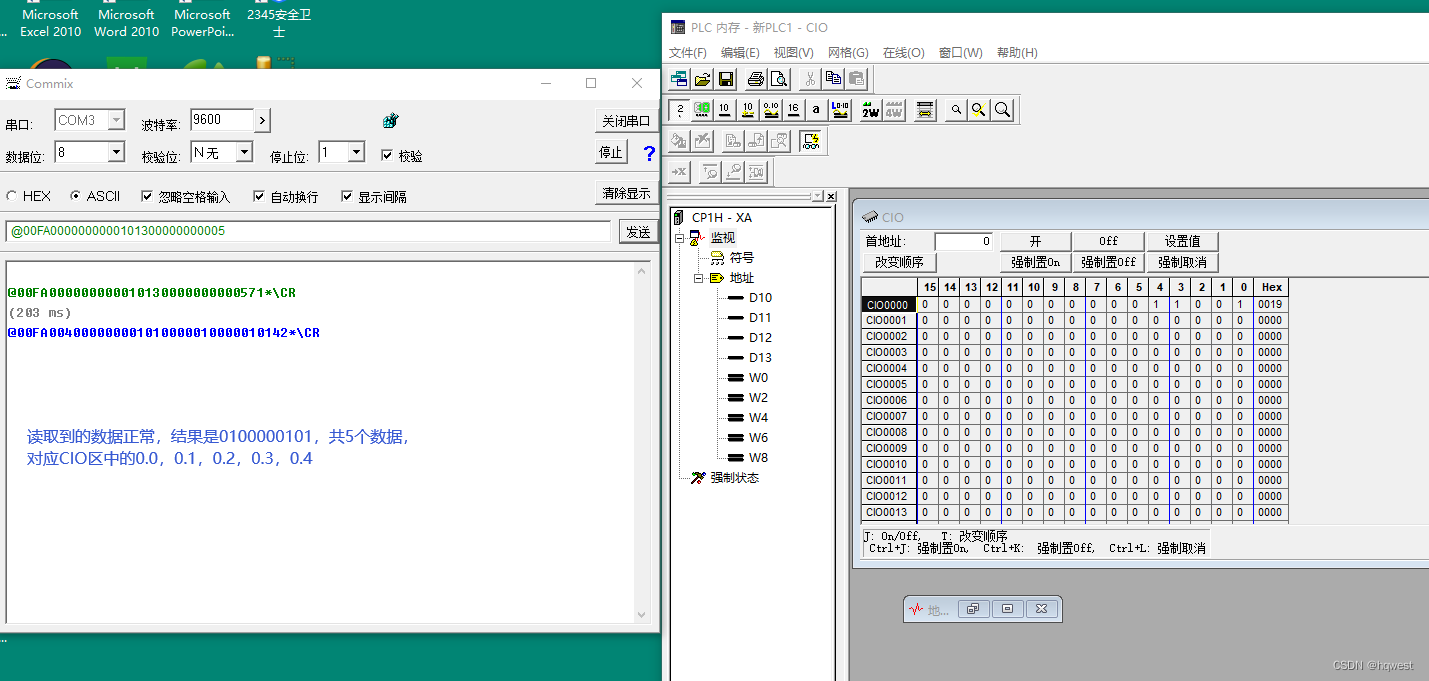
发送:@00FA000000000010130000000000571*\CR
接收:@00FA004000000001010000010000010142*\CR
发送分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0101-读取命令
30-存储区代号,B0表示CIO区字,也就是指CIO存储是2进制类型的, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
000000-起始地址,占3个字节,0000为存储器的编号,后面的00为存储器的位
0005-数量,占2个字节
71-异或校验
*-固定写法
\CR-回车
接收分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0101-读取命令
0000-错误码,0000表示没有错误,即正常
0100000101-返回的具体数据,占4个字节,分别是01,00,00,01,01即true,false,false,true,true
42-异或校验
*-固定写法
\CR-回车
注意:
存储区代号:D位:02,D字:82,W位:31,W字:B1,C位:30,C字:B0
读取命令0101,写入命令0102
所有指令是16进制格式的ASCII码 ,存储区代号和读取写入命令都是固定的,这是协议手册上定义死的,不能改的,有兴趣的可以看官方协议手册。
(2)写入CIO100.05-100.09数据为11001

发送:@00FA0000000000102300064050005010100000174*\CR
接收:@00FA00400000000102000040*\CR
发送报文分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0102-写入命令,占2个字节
30-存储区代号,占1个字节,B0表示CIO区字,也就是指CIO存储是2进制类型的, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
006405-起始地址,占3个字节,0064为存储器的编号,0064转为10进制就是100,后面的05为存储器的位,表示第5位
0005-数量,占2个字节
74-异或校验
*-固定写法
\CR-回车
****************************************************************************************************************************************
发送:@00FA0000000000102300064050005010100000174*\CR
接收:@00FA00400000000102000040*\CR
接收报文分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
00-DA2,默认00
00-ICF,默认00
0102-写入命令
0000-错误码,0000表示没有错误,即正常
40-异或校验
*-固定写法
\CR-回车
3.4 读取和写入D区数据
设置D区100开始的4个数据123,900,78,4569

发送指令

(1)读取D区100开始的4个short类型数据
发送:@00FA0 00 00 0A 00 01018200640000040A*\CR
接收:@00FA00400A000001010000007B0384004E11D9 44*\CR
发送分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0101-读取命令
82-存储区代号,B0表示CIO区字,也就是指CIO存储是2进制类型的, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
006400-起始地址,占3个字节,0064为存储器的编号,即10进制的100,后面的00为存储器的位
0004-数量,占4个字节
0A-异或校验
*-固定写法
\CR-回车
接收分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0101-读取命令
0000-错误码,0000表示没有错误,即正常
007B0384004E11D9-返回的具体数据,占16个字节,分别是16进制的007B,0384,004E,11D9,即123,900,78,4569
0A-异或校验
*-固定写法
\CR-回车
(2)向D区40的地址写入4个ushor数据110, 120, 130, 140

发送:@00FA000000A000102820028000004006E00780082008C0C*\CR
接收:@00FA00400A00000102000031*\CR
发送分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0102-读取命令
82-存储区代号,B0表示CIO区字,也就是指CIO存储是2进制类型的, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
002800-起始地址,占3个字节,0028为存储器的编号,即10进制的40,后面的00为存储器的位
0004-写入数量,占2个字节
006E00780082008C-写入的数据,这里是16进制的,即006E,0078,0082,008C,转换成10进制就是110, 120, 130, 140
0C-异或校验
*-固定写法
\CR-回车
接收分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0102-读取命令
0000-错误码,0000表示没有错误,即正常
31-异或校验
*-固定写法
\CR-回车
3.5读取和写入W区数据
设置W区104开始的4个数据

发送指令

发送分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0101-读取命令
B1-存储区代号,B1表示W区字, 存储区代号=>D位:02,D字:82,W位:31,C位:30,W字:B1,C字:B0
006800-起始地址,占3个字节,0068为存储器的编号,即10进制的104,后面的00为存储器的位
0008-读取数量,占2个字节,浮点型数据中一个数据占2个寄存器,4个数据就占8个寄存器,所以是0008
73-异或校验
*-固定写法
\CR-回车
接收分析如下:
@-起始符,固定写法
00-PLC地址,默认0,占2位
FA-头编码,可以是FA,RD,WR
0-等待单位,默认为0MS
00-SID,默认00
00-SA2,默认00
0A-DA2,默认00
00-ICF,默认00
0101-读取命令
0000-错误码,0000表示没有错误,即正常
147B3F8E147BC00E333343CBC000C470-返回的具体数据,分别是10进制的1.11,-2.22,406.4,-963
0A-异或校验
*-固定写法
\CR-回车
147B3F8E147BC00E333343CBC000C470-返回的具体数据,其实应该分别是10进制的1.11,-2.22,406.4,-963 ,但这个软件返回的数据解析不正确 ,说明这软件有问题,不好,有问题需要改进,下节看我写的工具软件,比这个解析强多了。

相关文章:
C#上位机与欧姆龙PLC的通信05---- HostLink协议
1、介绍 Hostlink协议是欧姆龙PLC与上位机链接的公开协议。上位机通过发送Hostlink命令,可以对PLC进行I/O读写、可以对PLC进行I/O读写、改变操作模式、强制置位/复位等操作。由于是公开协议,即便是非欧姆龙的上位设备(软件)&…...
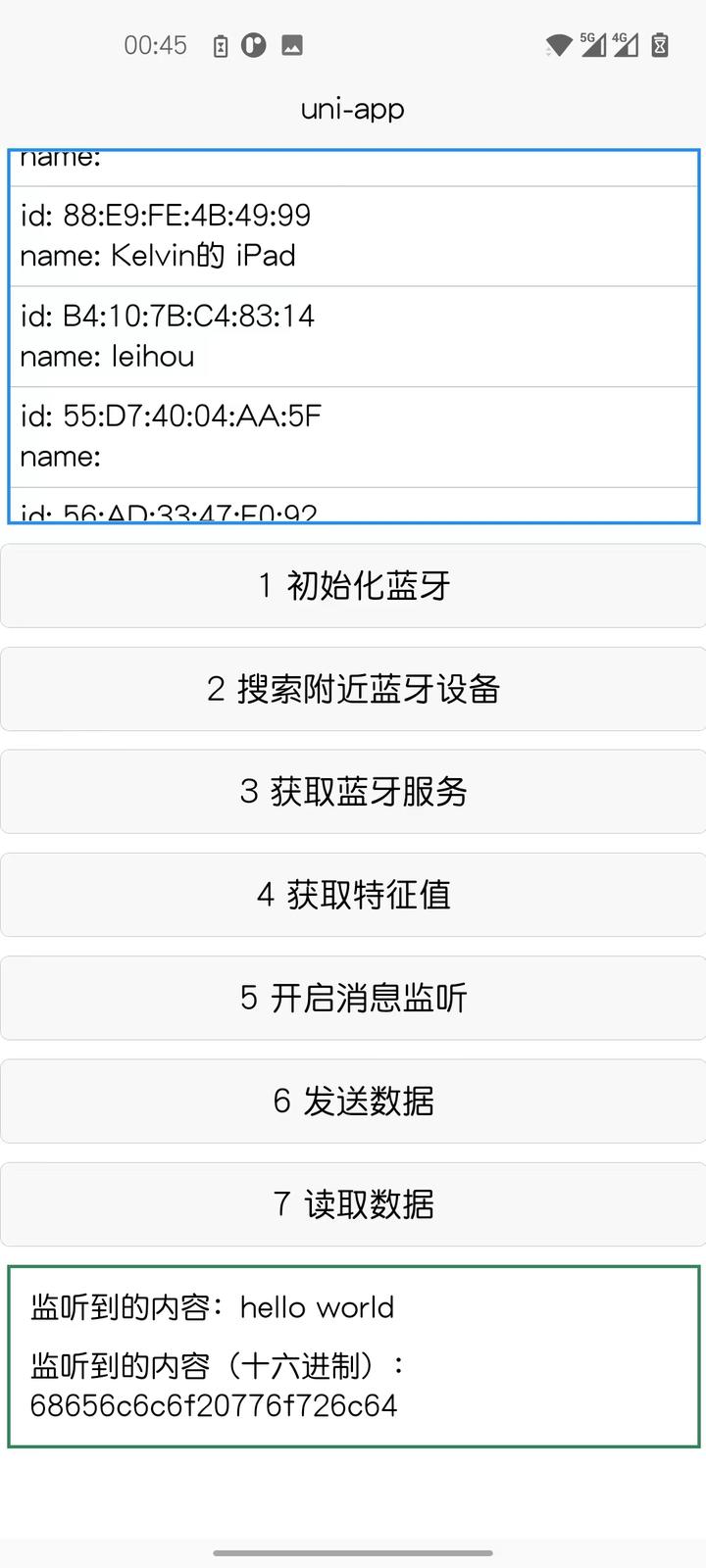
Uniapp 开发 BLE
BLE 低功耗蓝牙(Bluetooth Low Energy,或称Bluetooth LE、BLE,旧商标Bluetooth Smart),用于医疗保健、运动健身、安防、工业控制、家庭娱乐等领域。在如今的物联网时代下大放异彩,扮演者重要一环ÿ…...

c语言排序算法
C语言代码示例: 冒泡排序(Bubble Sort): void bubbleSort(int arr[], int n) {for (int i 0; i < n-1; i) {for (int j 0; j < n-i-1; j) {if (arr[j] > arr[j1]) {int temp arr[j];arr[j] arr[j1];arr[j1] temp;…...

【机器学习】模式识别
1 概述 模式识别,简单来讲,就是分类问题。 模式识别应用:医学影像分析、人脸识别、车牌识别、遥感图像 2 模式分类器 分类器的分类:线性分类器、非线性分类器、最近邻分类器 2.1 分类器的训练(学习)过…...
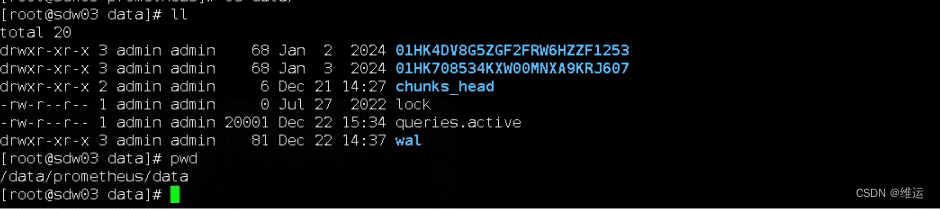
【Prometheus|报错】Out of bounds
【背景】进入Prometheus地址的9090端口,pushgateway(0/1)error : out of bounds 【排查分析】 1、out of bounds报错,是由于Prometheus向tsdb存数据出错,与最新存数据的时间序列有问题,有可能当前时间与最…...
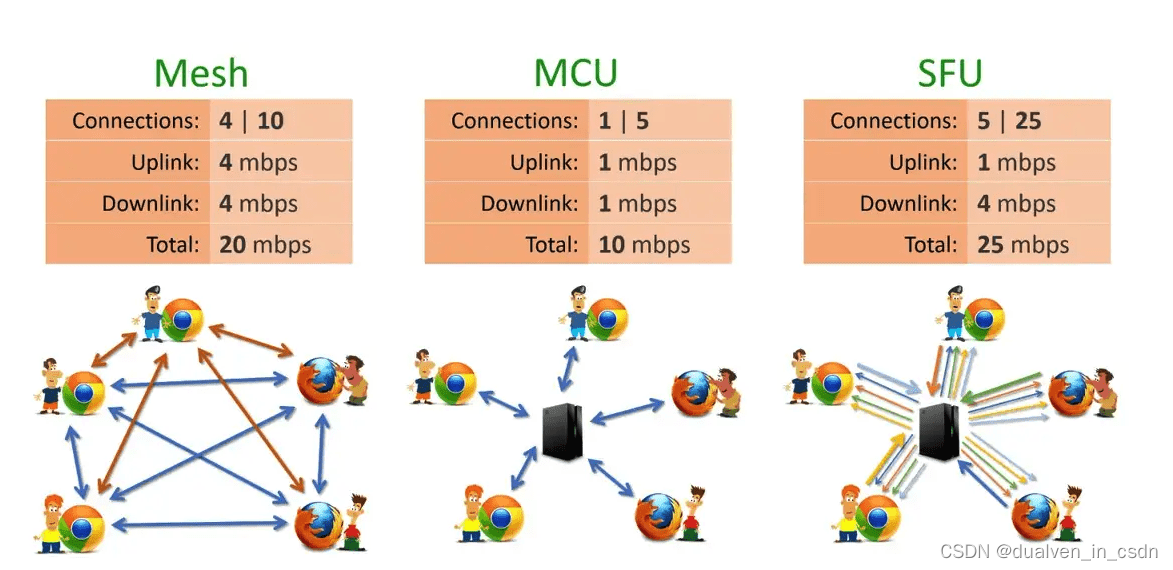
【音视频】Mesh、Mcu、SFU三种框架的总结
目录 三种网络场景介绍 【Mesh】 【MCU】(MultiPoint Control Unit) 【SFU】(Selective Forwarding Unit) 三种网络架构的优缺点 Mesh架构 MCU架构(MultiPoint Control Unit) SFU架构(Selective Forwarding Unit) 总结 参考文章 三种网络场景介绍 【Mesh】 Mesh架构…...
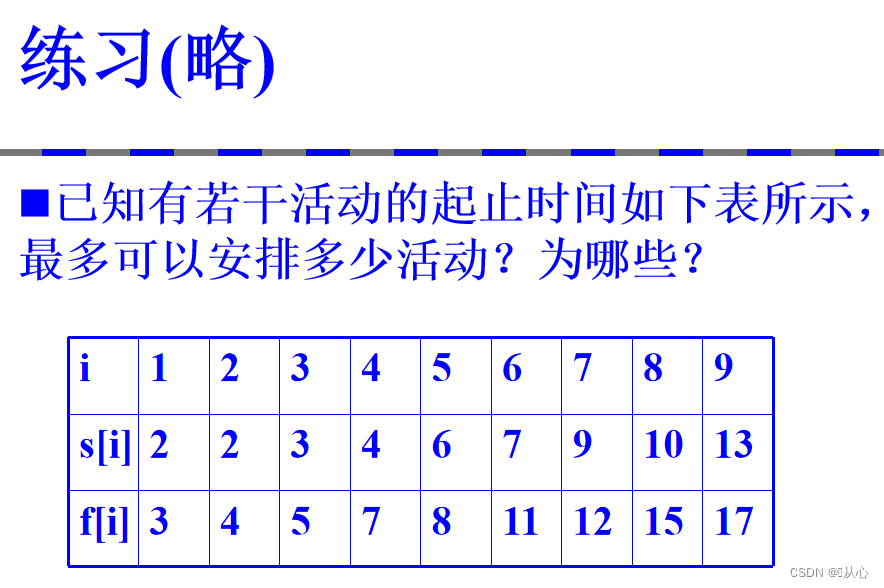
高级算法设计与分析(四) -- 贪心算法
系列文章目录 高级算法设计与分析(一) -- 算法引论 高级算法设计与分析(二) -- 递归与分治策略 高级算法设计与分析(三) -- 动态规划 高级算法设计与分析(四) -- 贪心算法 高级…...
MATLAB - 机器人逆运动学设计器(Inverse Kinematics Designer APP)
系列文章目录 前言 一、简介 通过逆运动学设计器,您可以为 URDF 机器人模型设计逆运动学求解器。您可以调整逆运动学求解器并添加约束条件,以实现所需的行为。使用该程序,您可以 从 URDF 文件或 MATLAB 工作区导入 URDF 机器人模型。调整逆…...
使用OpenCV DNN模块进行人脸检测
内容的一部分来源于贾志刚的《opencv4应用开发、入门、进阶与工程化实践》。这本书我大概看了一下,也就后面几章比较感兴趣,但是内容很少,并没有想像的那种充实。不过学习还是要学习的。 在实际工程项目中,并不是说我们将神经网络…...

C#中使用OpenCV的常用函数
以下是一些C#中使用OpenCV的常用函数例子: 1. 加载图像: using OpenCvSharp;Mat image Cv2.ImRead("path_to_your_image.jpg", ImreadModes.Color); 2. 显示图像: Cv2.NamedWindow("Image Window", WindowFlags.Nor…...
使用Swift Package Manager (SPM)实现xcframework分发
Swift Package Manager (SPM) 是苹果官方提供的用于管理 Swift 项目的依赖关系和构建过程的工具。它是一个集成在 Swift 编程语言中的包管理器,用于解决在开发过程中管理和构建包依赖项的需求。 1、上传xcframework.zip到服务端 压缩xcframeworks成一个zip包&…...
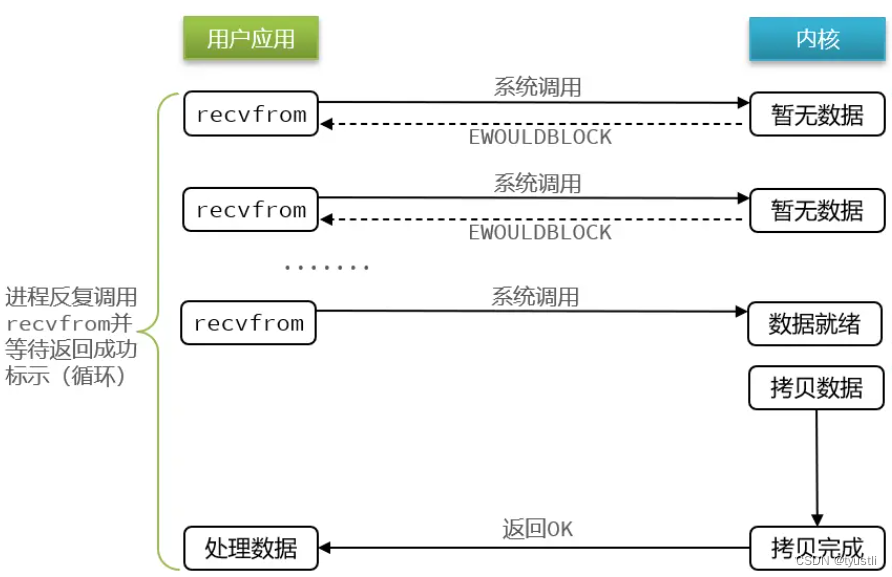
非阻塞 IO(NIO)
文章目录 非阻塞 IO(NIO)模型驱动程序应用程序模块使用 非阻塞 IO(NIO) 上一节中 https://blog.csdn.net/tyustli/article/details/135140523,使用等待队列头实现了阻塞 IO 程序使用时,阻塞 IO 和非阻塞 IO 的区别在于文件打开的时候是否使用了 O_NONB…...

Android应用-flutter使用Positioned将控件定位到底部中间
文章目录 场景描述示例解释 场景描述 要将Positioned定位到屏幕底部中间的位置,你可以使用MediaQuery来获取屏幕的高度,然后设置Positioned的bottom属性和left或right属性,一般我们left和right都会设置一个值让控制置于合适的位置࿰…...
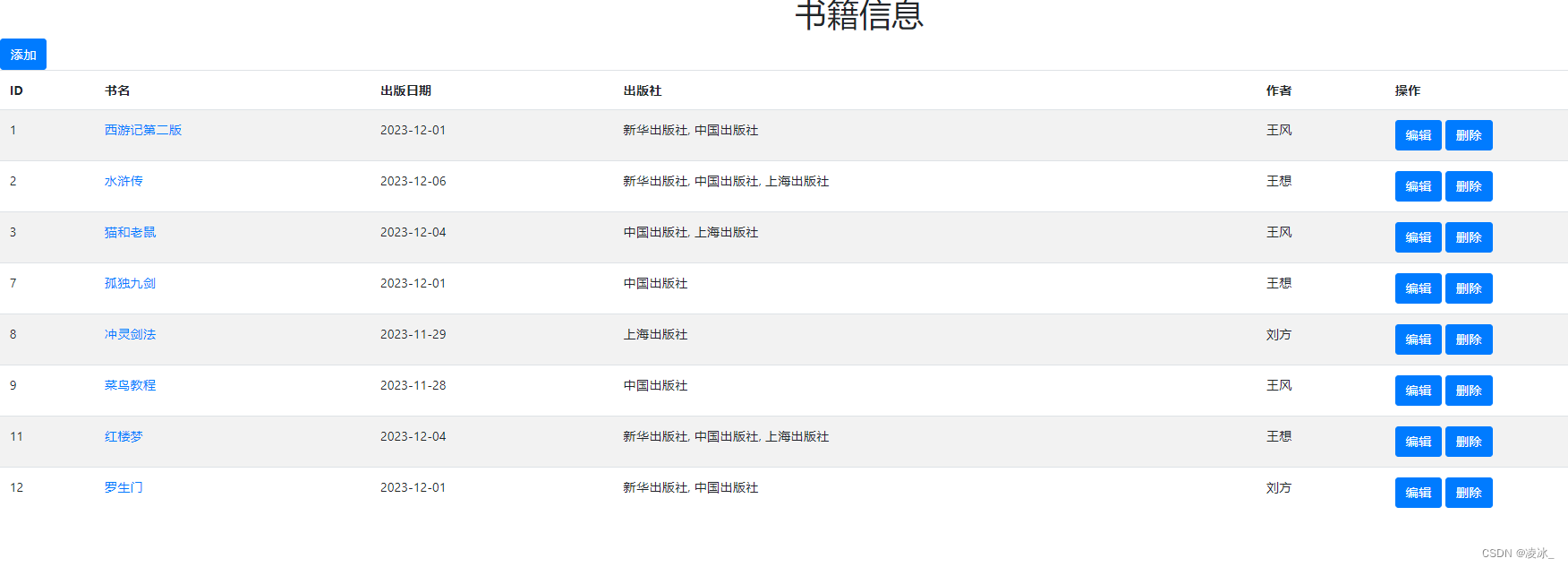
Django 简单图书管理系统
一、图书需求 1. 书籍book_index.html中有超链接:查看所有的书籍列表book_list.html页面 2. 书籍book_list.html中显示所有的书名,有超链接:查看本书籍详情book_detail.html(通过书籍ID)页面 3. 书籍book_detail.html中书的作者和出版社&…...
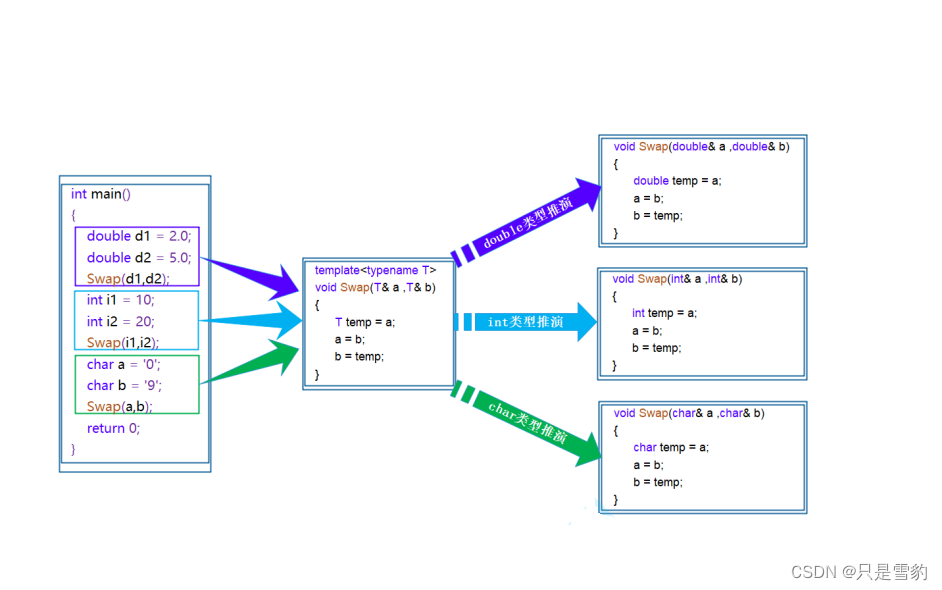
C++内存管理和模板初阶
C/C内存分布 请看代码: int globalVar 1; static int staticGlobalVar 1; void Test() {static int staticVar 1;int localVar 1;int num1[10] { 1, 2, 3, 4 };char char2[] "abcd";const char* pChar3 "abcd";int* ptr1 (int*)mallo…...
分布式对象远程通信)
QtRO(Qt Remote Objects)分布式对象远程通信
一、什么是QtRO Qt Remote Objects(QRO)是Qt提供的一种用于实现远程对象通信的机制。 QtRO支持两种类型的通信:RPC(远程过程调用)和LPC(本地进程通信)。 RPC(远程过程调用…...
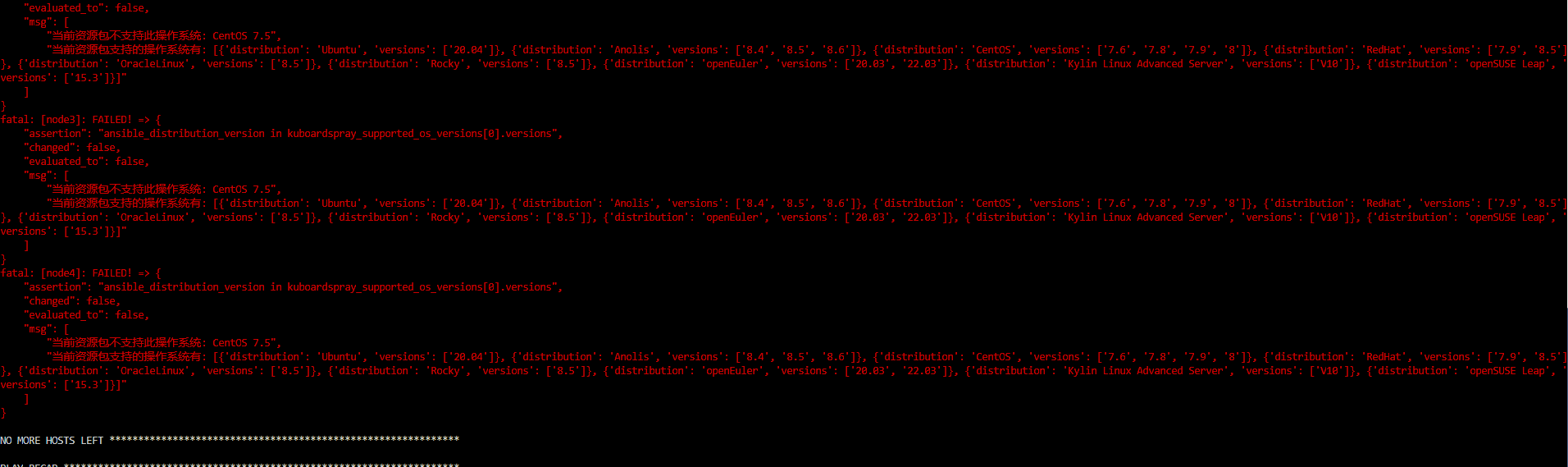
【K8s】1# 使用kuboard-spray安装K8s集群
文章目录 搭建k8s集群1.推荐配置1.1.服务器配置1.2.软件版本 2.使用Kuboard-Spray安装k8s集群2.1.配置要求2.2.操作系统兼容性2.3.安装 Kuboard-Spray2.4.加载离线资源包2.5.规划并安装集群2.6.安装成功2.7.访问集群 3.涉及的命令3.1.linux 4.问题汇总Q1:启动离线集…...

leetCode算法—12. 整数转罗马数字
12. 整数转罗马数字 难度:中等 ** 罗马数字包含以下七种字符: I, V, X, L,C,D 和 M。 字符 数值 I 1 V 5 X 10 L 50 C 100 D 500 M 1000 例如, 罗马数字 2 写做 II ,即…...
使用OpenCV4实现工业缺陷检测的六种方法
目录 1 机器视觉2 缺陷检测3 工业上常见缺陷检测方法 1 机器视觉 机器视觉是使用各种工业相机,结合传感器跟电气信号实现替代传统人工,完成对象识别、计数、测量、缺陷检测、引导定位与抓取等任务。其中工业品的缺陷检测极大的依赖人工完成,…...
Excel 获取当前行的行数
ROW() 获取当前行 ROW()1 获取当前行然后支持二次开发...

基于语义搜索的AI代码理解工具copaw-code深度解析
1. 项目概述:一个面向代码搜索与理解的AI工具 最近在GitHub上看到一个挺有意思的项目,叫 QSEEKING/copaw-code 。乍一看这个标题,可能会有点摸不着头脑,“copaw”是什么?但结合“code”和项目托管在QSEEKING这个组织…...
从零构建大语言模型:Transformer架构、训练技巧与实战指南
1. 项目概述:从零构建你自己的大语言模型最近几年,大语言模型(LLM)的热度居高不下,从ChatGPT到Claude,再到国内外的各种开源模型,它们展现出的理解和生成能力让人惊叹。但你是否也和我一样&…...

Pandrator:基于Python的自动化内容生成与数据转换工具实践
1. 项目概述与核心价值最近在折腾一些自动化数据处理和内容生成的工作流,发现了一个挺有意思的开源项目,叫Pandrator。乍一看这个名字,可能会联想到“潘多拉”和“生成器”的结合,实际上它也确实是一个功能强大的内容转换与生成工…...

Simulink模型到汽车控制器:基于模型开发的完整路径
Simulink模型到汽车控制器:基于模型开发的完整路径 一辆智能电动汽车的"灵魂",通常写在300万行以上的嵌入式代码里。但如果每一行代码都要工程师手写,开发周期会从18个月变成……永远完成不了。 一个真实的问题 2023年,…...

AI智能体操作安卓设备:基于agent-droid-bridge的自动化实践
1. 项目概述:连接AI与安卓设备的桥梁 最近在折腾AI智能体(Agent)和自动化流程时,遇到了一个挺有意思的需求:如何让运行在服务器上的AI程序,直接去操作一台真实的安卓手机或模拟器,完成一些复杂的…...

基于React的记忆管理UI组件库:openclaw-memory-ui实战指南
1. 项目概述:一个为记忆管理而生的开源UI组件库最近在折腾一个需要处理大量结构化记忆数据的项目,比如知识库、笔记应用或者智能助手的历史对话管理。这类应用的核心痛点在于,数据本身是复杂的、多维的,但传统的列表或表格展示方式…...

移动端Shell集成AI助手:ShellGPTMobile部署与实战指南
1. 项目概述:当ShellGPT遇见移动端如果你是一个重度命令行用户,同时又对AI助手(比如ChatGPT)的便利性爱不释手,那么你很可能面临一个尴尬的境地:在终端里敲命令时,突然需要AI帮忙解释一段日志、…...

Docker容器MCP服务镜像:AI安全运维与自动化实践
1. 项目概述:一个为Docker容器提供MCP服务的镜像最近在折腾一些自动化工作流,发现很多工具都开始支持一种叫做MCP(Model Context Protocol)的协议。简单来说,MCP就像是一个标准化的“插座”,让各种AI模型&a…...

基于Arduino与加速度传感器的可穿戴智能徽章制作全解析
1. 项目概述:一个会“走路”的智能徽章几年前,当《Pokemon Go》风靡全球时,我注意到一个有趣的现象:深夜的公园里,总有一群玩家低头盯着手机屏幕,在昏暗的光线下穿梭。这固然是游戏的乐趣,但也带…...

【最新 v2.7.1 版本安装包】5 分钟搞定 OpenClaw,零基础无需命令一键部署保姆级教学
OpenClaw(小龙虾)Windows 一键部署保姆级教程 | 10 分钟搭建专属数字员工【点击下载最新OpenClaw安装包】 前言 2026 年开源圈热门 AI 智能体 OpenClaw(昵称小龙虾),GitHub 星标突破 28 万,凭借本地运行 …...