STM32软硬件CRC测速对比
硬件CRC配置 以及软硬件CRC速度对比
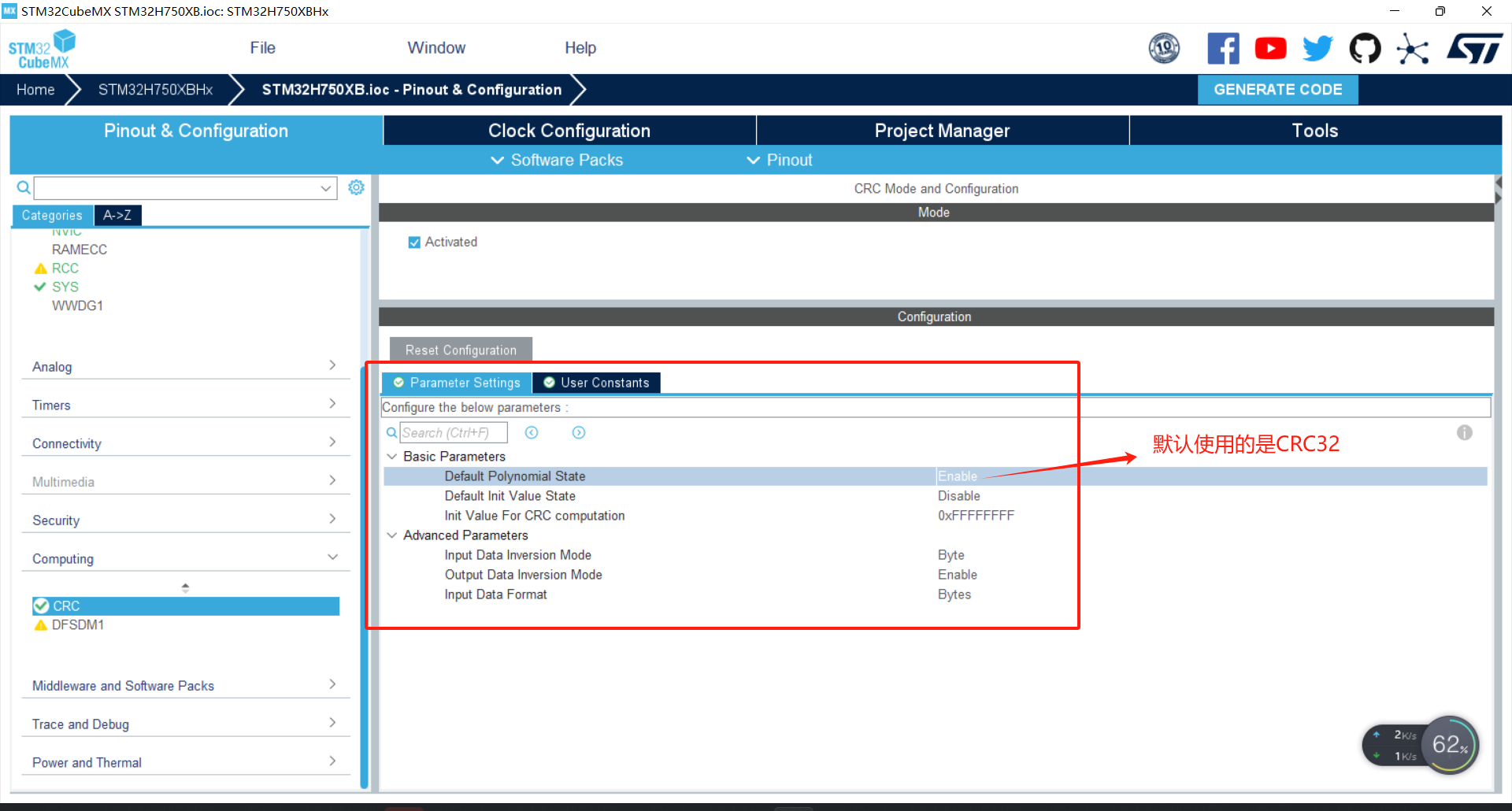
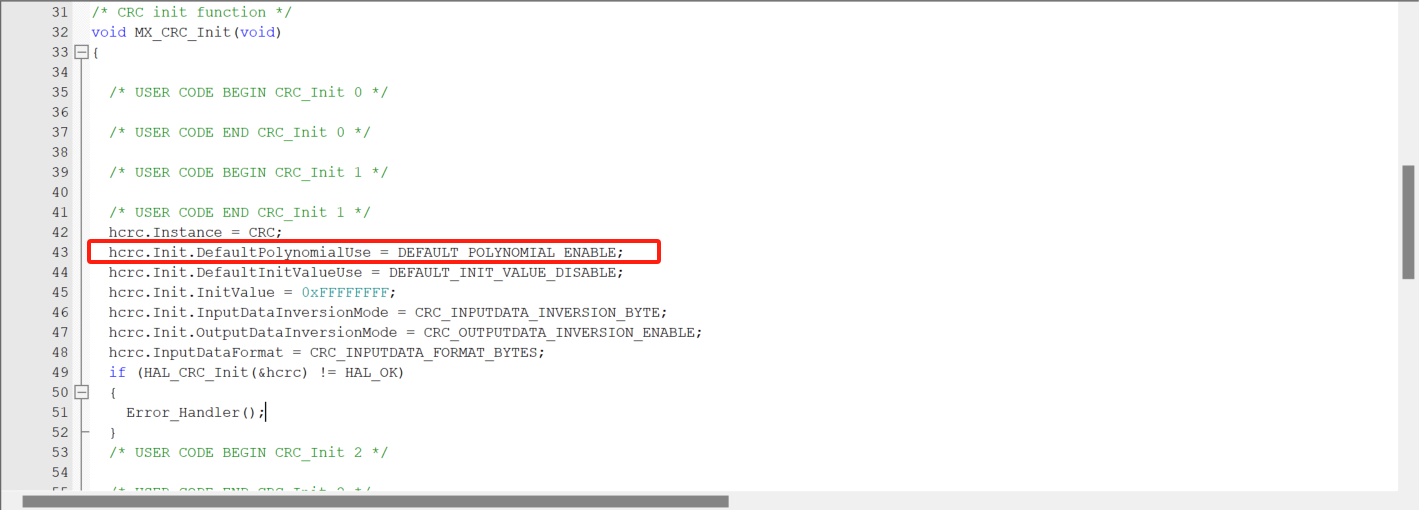
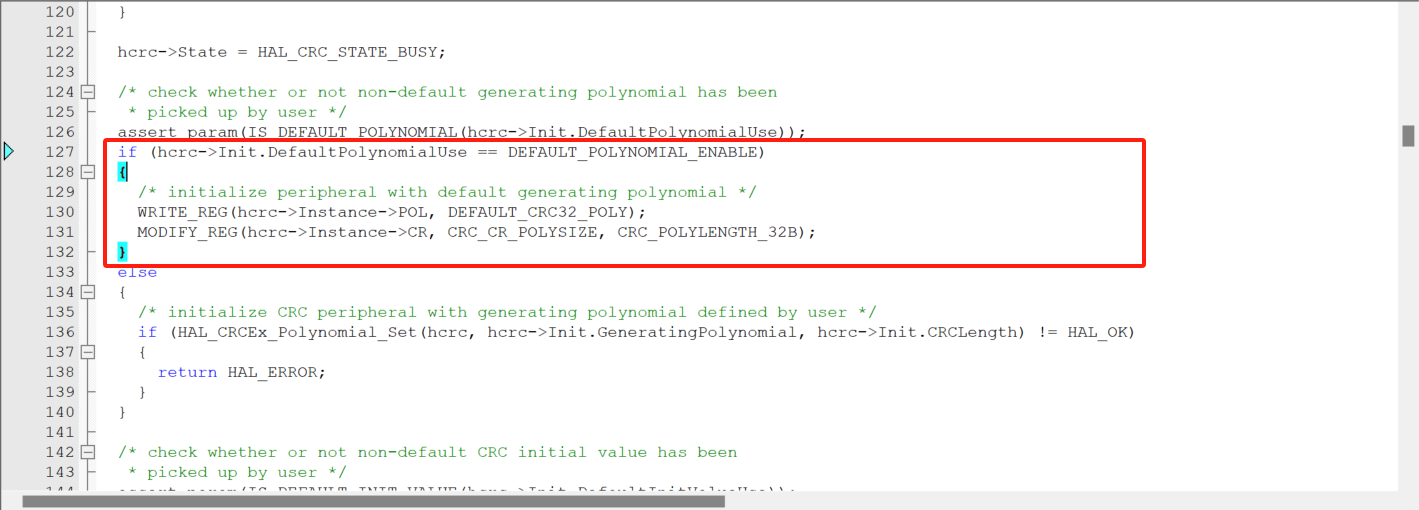
使用CUBEMX配置默认使用的是CRC32,从库中可以看出这一点
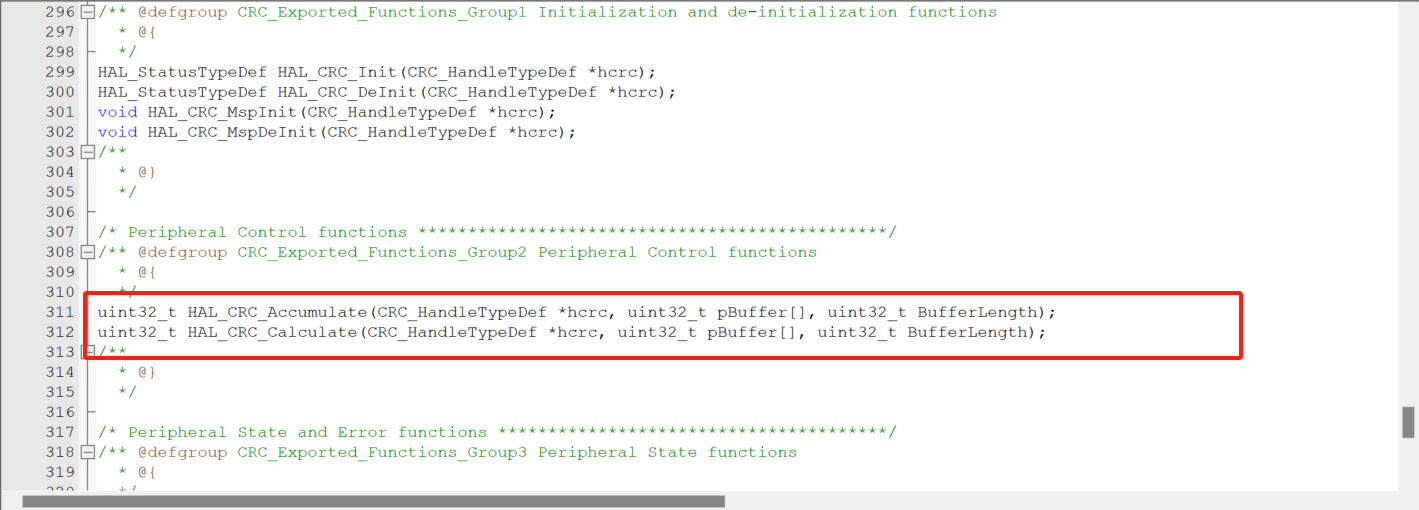
HAL库提供了以下两个计算函数
-
HAL_CRC_Accumulate(CRC_HandleTypeDef *hcrc, uint32_t pBuffer[], uint32_t BufferLength);
这个函数用于在已有的CRC校验结果的基础上累积(accumulate)新的数据块。如果你需要分多次处理数据,比如将数据分成几个块,然后分别进行CRC计算,最后将这些计算结果合并,就可以使用这个函数。
-
HAL_CRC_Calculate(CRC_HandleTypeDef *hcrc, uint32_t pBuffer[], uint32_t BufferLength);
这个函数用于对给定的数据块进行一次完整的CRC计算。如果你有整个数据块,并且想要一次性计算CRC,那么可以使用这个函数。
CRC16配置参考:
LINK
软件CRC32
#define CRC32_POLYNOMIAL 0xEDB88320u
//传入参数: 数据首地址 数据大小
static uint32_t calculate_crc32(const void *data, size_t size) {const uint8_t *byteData = (const uint8_t *)data;uint32_t crc = 0xFFFFFFFFu;for (size_t i = 0; i < size; ++i) {crc ^= byteData[i];for (int j = 0; j < 8; ++j) {crc = (crc >> 1) ^ ((crc & 1) ? CRC32_POLYNOMIAL : 0);}}return ~crc;
}
软硬件测速对比:
平台使用STM32H7,内存使用外扩的SDRAM
对比方法
-
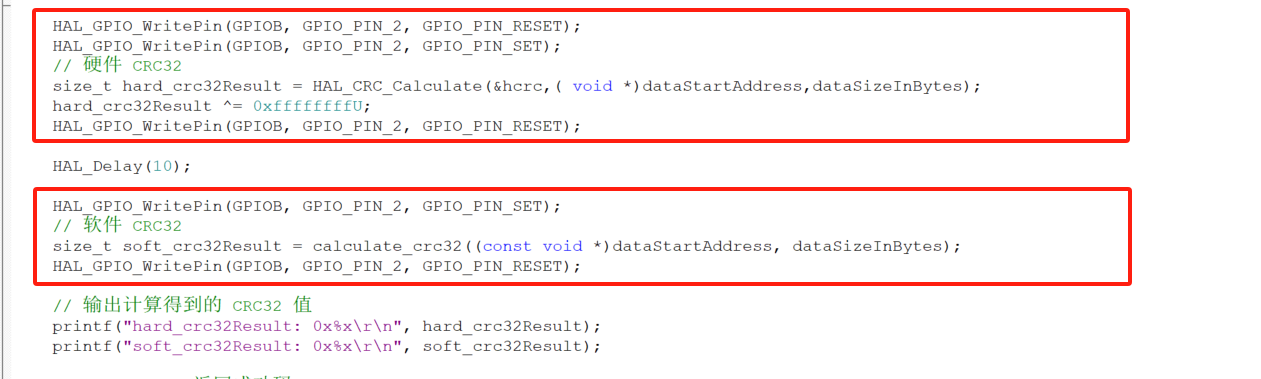
使用同一块内存区域校验软硬件CRC32,校验前后IO电平翻转,示波器捕获,该方法比较精确
static int crc32(int argc, char **argv) {if (argc != 3) {fprintf(stderr, "Usage: crc32 <start_address> <size_in_bytes>\r\n");return 1; // 返回错误码}// 从命令行参数中获取起始地址和大小uint32_t dataStartAddress;size_t dataSizeInBytes;if (sscanf(argv[1], "%x", &dataStartAddress) != 1) {fprintf(stderr, "Invalid start address\r\n");return 1;}if (sscanf(argv[2], "%zu", &dataSizeInBytes) != 1) {fprintf(stderr, "Invalid size\r\n");return 1;}HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);// 硬件 CRC32size_t hard_crc32Result = HAL_CRC_Calculate(&hcrc,( void *)dataStartAddress,dataSizeInBytes);hard_crc32Result ^= 0xffffffffU;HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);HAL_Delay(10);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);// 软件 CRC32size_t soft_crc32Result = calculate_crc32((const void *)dataStartAddress, dataSizeInBytes);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);// 输出计算得到的 CRC32 值printf("hard_crc32Result: 0x%x\r\n", hard_crc32Result);printf("soft_crc32Result: 0x%x\r\n", soft_crc32Result);return 0; // 返回成功码 }主要部分
128K数据测试结果:
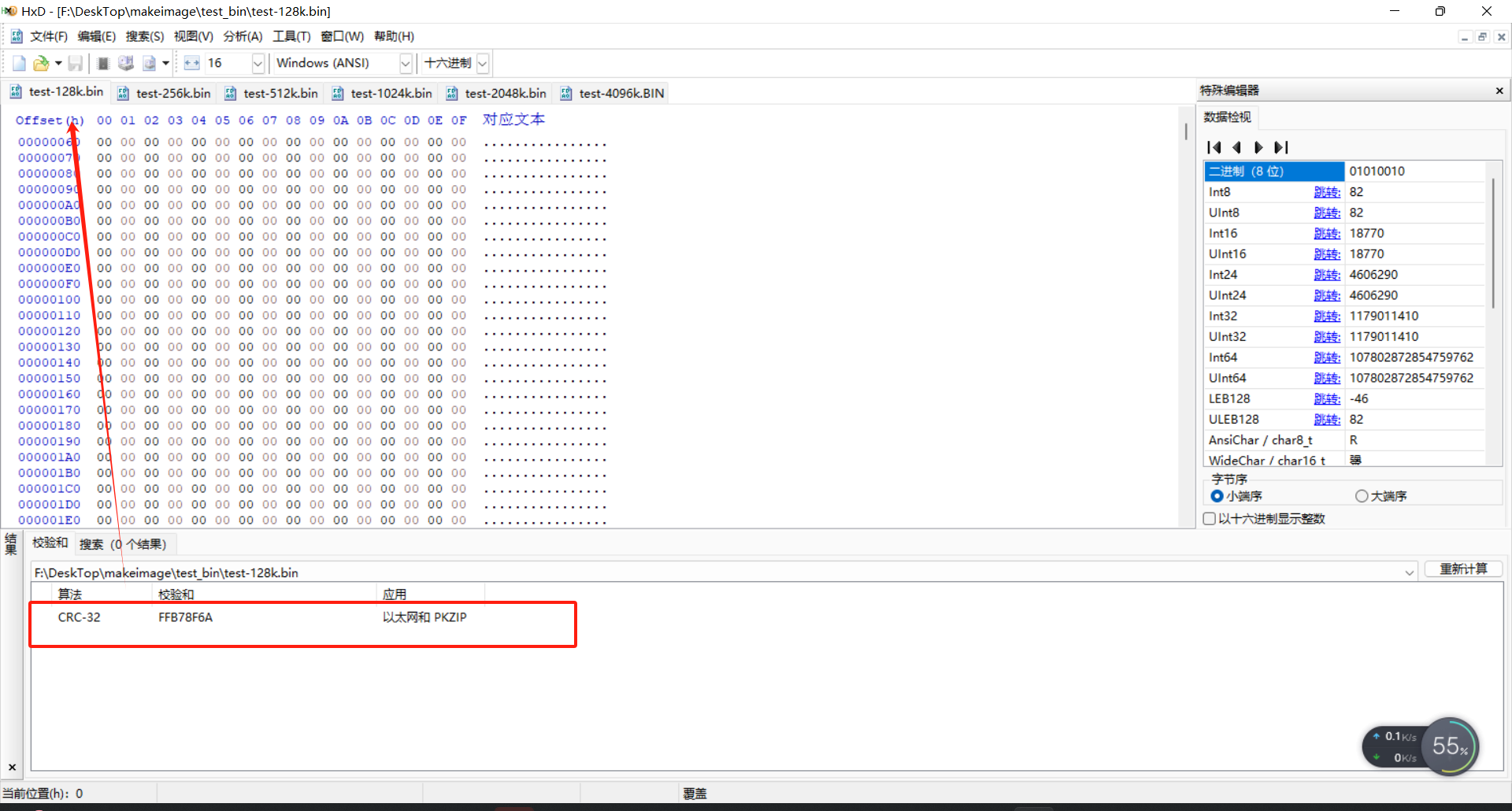
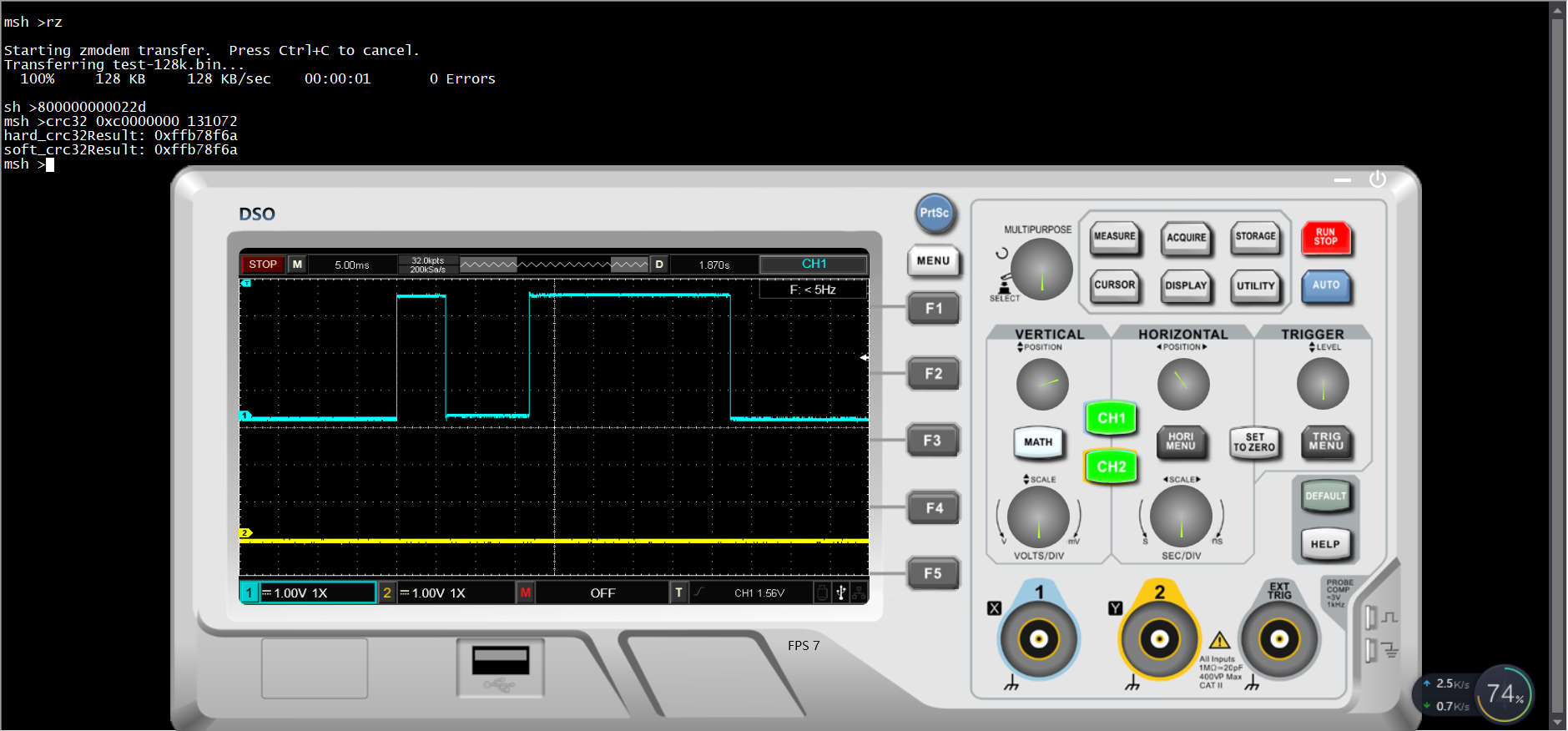
- 硬件测速在6ms左右
- 软件测速在25ms左右
2M数据测试结构
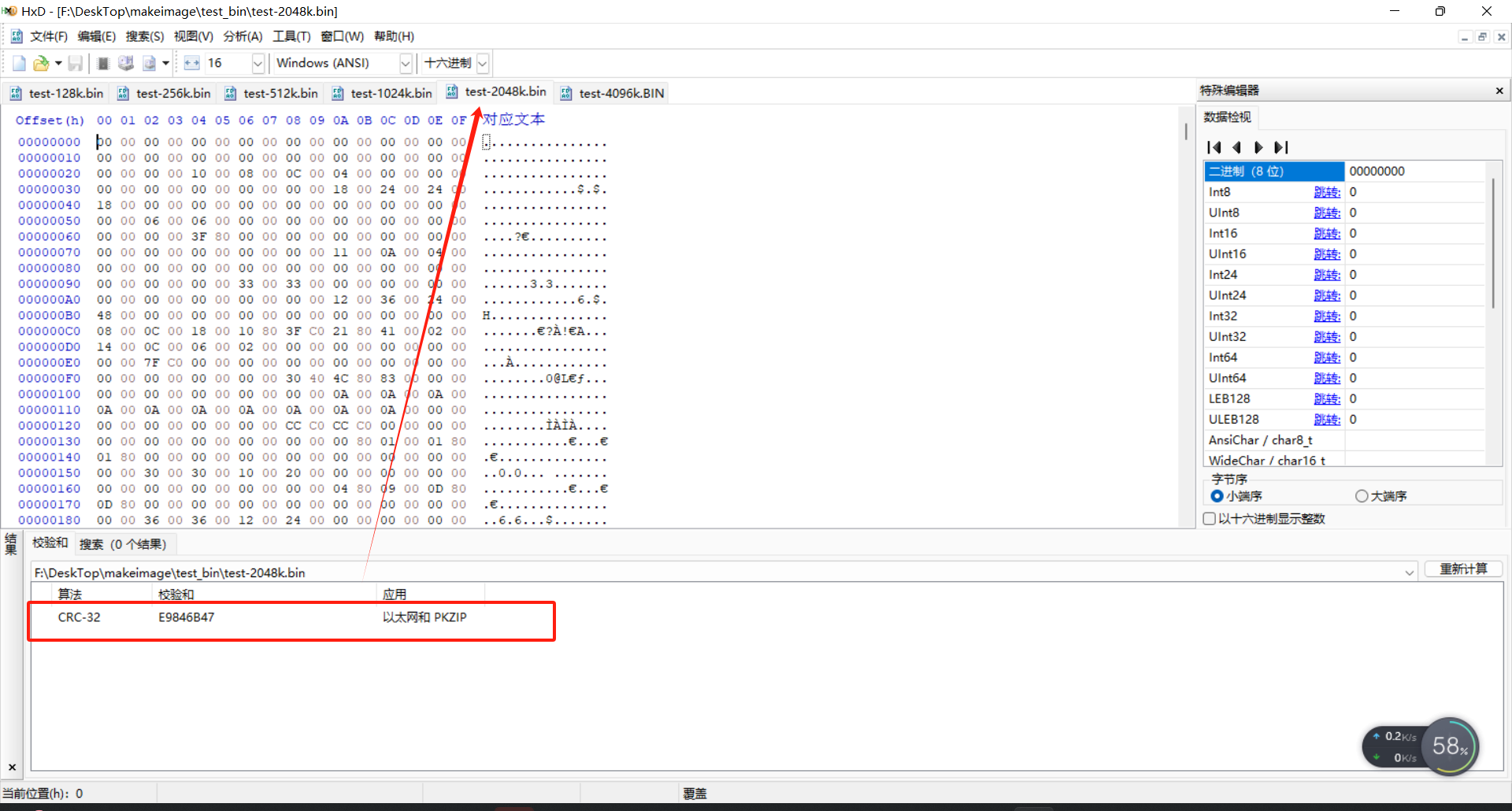

- 硬件在100ms左右
- 软件在410ms左右
总结:
- 对比结果硬件CRC32比软件CRC32快4倍左右
相关文章:
STM32软硬件CRC测速对比
硬件CRC配置 以及软硬件CRC速度对比 使用CUBEMX配置默认使用的是CRC32,从库中可以看出这一点 HAL库提供了以下两个计算函数 HAL_CRC_Accumulate(CRC_HandleTypeDef *hcrc, uint32_t pBuffer[], uint32_t BufferLength); 这个函数用于在已有的CRC校验结果的基础上累积…...
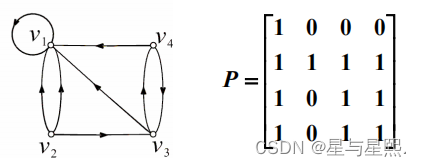
第九部分 图论
目录 例 相关概念 握手定理 例1 图的度数列 例 无向图的连通性 无向图的连通度 例2 例3 有向图D如图所示,求 A, A2, A3, A4,并回答诸问题: 中间有几章这里没有写,感兴趣可以自己去学,组合数学跟高中差不多,…...

如何用java实现对java虚拟机的性能监控?
要使用Java实现对Java虚拟机(JVM)的性能监控,可以使用Java Management Extensions(JMX)来获取和监控JVM的各种指标。以下是一个简单的示例代码,演示如何使用JMX监控JVM的内存使用情况: import …...
电路设计(7)——窗口比较器的multism仿真
1.功能设计 构建一个窗口比较器的电路,在输入电压大于3.5v,小于0.8v时,蜂鸣器报警,输入电压在0.8v到3.5v之间时,不报警。 整体电路如下: 2.设计思路 在输入端,采取电阻分压的方式,输…...

前端已死?探讨人工智能与低代码对前端的影响
文章目录 每日一句正能量前言前端行业究竟是好是坏?数字化转型的当下前端工程师该何去何从? 想要入行前端先认清这三个事实 后记 每日一句正能量 人的结构就是相互支撑,众人的事业需要每个人的参与。 前言 随着人工智能和低代码的崛起&#…...

树莓派,opencv,Picamera2利用舵机云台追踪人脸(PID控制)
一、需要准备的硬件 Raspiberry Pi 4b两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)二自由度舵机云台(如下图)Raspiberry CSI 摄像头 组装后的效果: 二、项目目…...

uniapp中推出当前微信小程序
uni.exitMiniProgram() 通过代码直接退出当前小程序 uni.exitMiniProgram({success: function() {console.log(退出小程序成功);},fail: function(err) {console.log(退出小程序失败, err);} })...

AndroidStudio无法新建aidl文件解决办法
我用的 AS 版本是 Android Studio Giraffe | 2022.3.1 Build #AI-223.8836.35.2231.10406996, built on June 29, 2023 右键新建 aidl 文件, 提示 (AIDL File)Requires setting the buildFeatures.aidl to true in the build file 解决办法 修改 app 的 build.…...

java爬虫(jsoup)如何设置HTTP代理ip爬数据
目录 前言 什么是HTTP代理IP 使用Jsoup设置HTTP代理IP的步骤 1. 导入Jsoup依赖 2. 创建HttpProxy类 3. 设置代理服务器 4. 使用Jsoup进行爬取 结论 前言 在Java中使用Jsoup进行网络爬虫操作时,有时需要使用HTTP代理IP来爬取数据。本文将介绍如何使用Jsoup设…...

ZooKeeper Client API 安装及使用指北
下载 wget https://archive.apache.org/dist/zookeeper/zookeeper-3.5.4-beta/zookeeper-3.5.4-beta.tar.gz解压 tar -zxf zookeeper-3.5.4-beta.tar.gz安装 cd zookeeper-3.5.4-beta/src/c/ ./configure make sudo make install到 make 这一步大概率会出现报错:…...
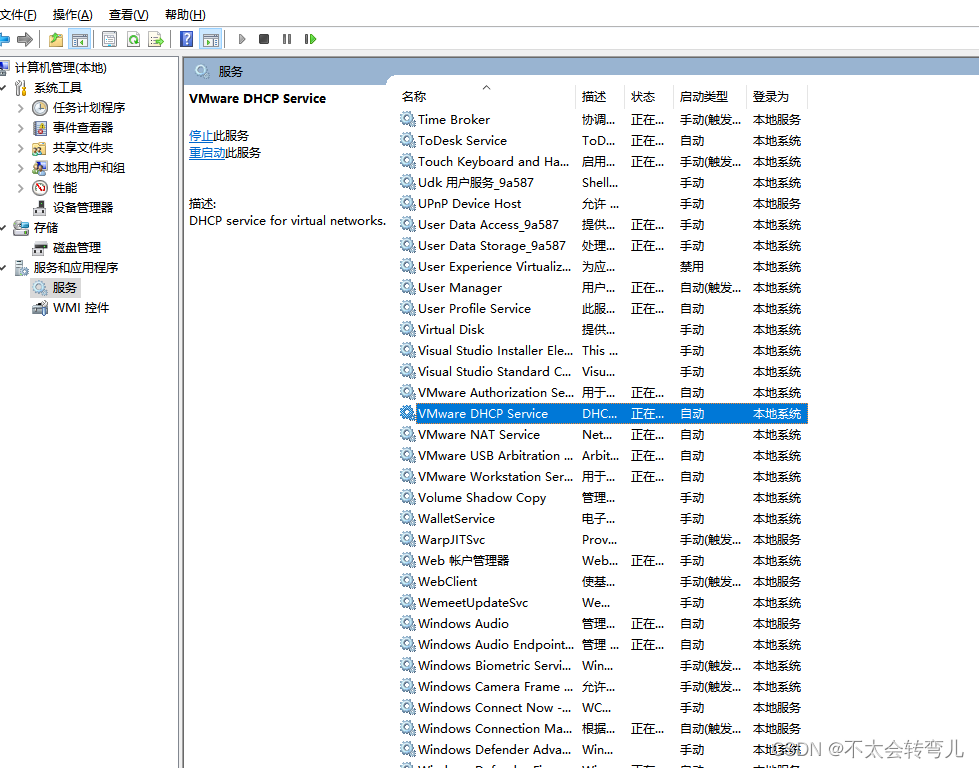
本机ping不通虚拟机
windows下finall shell连不上虚拟机了,之前是可以的,然后ping虚拟机,发现也ping不通,随后到处找问题。 在本地部分,控制面板 ——>网络和Internet——>网络连接 , 可以看到 VMnet1和Vmnet8虽然都是已…...

Linux cfdisk命令
Linux cfdisk命令用于磁盘分区。 cfdisk是用来磁盘分区的程序,它十分类似DOS的fdisk,具有互动式操作界面而非传统fdisk的问答式界面,您可以轻易地利用方向键来操控分区操作。 语法 cfdisk [-avz][-c <柱面数目>-h <磁头数目>-…...

实用学习网站和资料
github:https://github.com/GitHubDaily/GitHubDaily Linux操作手册: GitHub - abarrak/linux-sysops-handbook: Essentials of Linux system administration. 从零开始制作一个操作系统: GitHub - ruiers/os-tutorial-cn: 从零开始编写一个操作系统…...
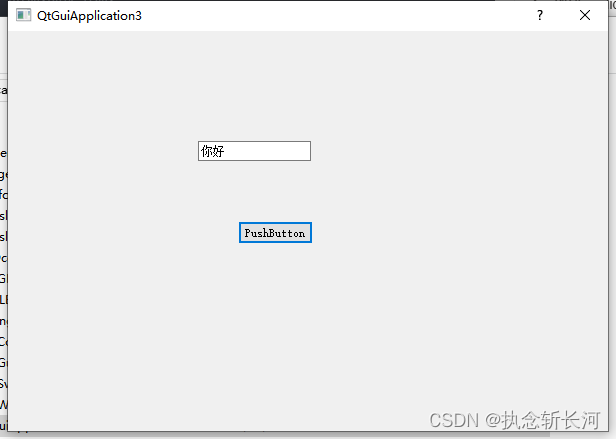
【已解决】c++qt如何制作翻译供程序调用
本博文源于笔者正在编写的工具需要创建翻译文件,恰好将qt如何进行翻译,从零到结果进行读者查阅,并非常推荐读者进行收藏点赞,因为步步都很清晰,堪称胎教式c制作,而且内容还包括如何部署在windows下。堪称值…...
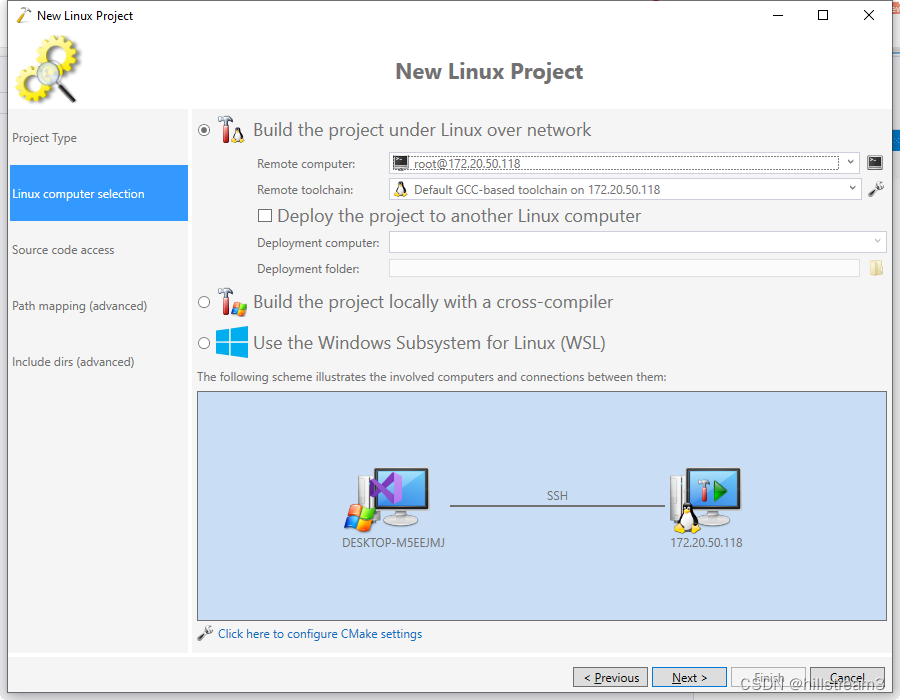
DPDK单步跟踪(3)-如何利用visual studio 2019和visual gdb来单步调试dpdk
准备工作 因为时间的关系,我想到哪说到哪,可能没那么高的完成度。 但其实有心的人,看到这个标题,就关了本文自己能做了。 why和how to build debug version DPDK,见前两篇。这里我们准备开始。 首先,你有一台linux机…...

Python爬虫---解析---BeautifulSoup
BeautifulSoup简称:bs4 作用:解析和提取数据 1. 安装:pip install bs4 或pip install bs4 -i https://pypi.douban.com/simple(使用国内镜像下载) 注意:需要安装在python解释器相同的位置,例如…...

Argument list too long when copying files
for i in /path/to/dir/*; do cp "$i" /path/to/other/dir/; done...

configure
configure 配置软件./configure --prefix$PWD/output CCaarch64-linux-gcc --hostaarch64-linux --enable-shared --enable-staticconfig.sub 文件 这个文件用于确定主机系统的类型,并返回与该系统相关的标识符。它包含一系列 shell 函数,用于检测主机…...
HOJ 项目部署-前端定制 默认勾选显示标签、 在线编辑器主题和字号大小修改、增加一言功能 题目AC后礼花绽放
# 项目拉取地址: https://gitee.com/himitzh0730/hoj.git # 切换到hoj-vue目录执行以下命令 #安装依赖 npm install #运行服务 npm run serve #修改代码后构建项目到dist文件夹,到服务器docker-compose.yml中修改hoj-frontend文件映射即可 npm run build…...
)
Scikit-Learn线性回归(二)
Scikit-Learn线性回归二:多项式回归 1、多项式回归2、多项式回归的原理3、Scikit-Learn多项式回归3.1、Scikit-Learn多项式回归API1、多项式回归 线性回归研究的是一个自变量与一个因变量之间的回归问题。在实际应用中,并不是所有的情景都符合线性关系,大多数情况都是非线性…...

鸣潮自动化助手:5步轻松实现后台智能战斗与资源收集
鸣潮自动化助手:5步轻松实现后台智能战斗与资源收集 【免费下载链接】ok-wuthering-waves 鸣潮 后台自动战斗 自动刷声骸 一键日常 Automation for Wuthering Waves 项目地址: https://gitcode.com/GitHub_Trending/ok/ok-wuthering-waves 还在为每天重复刷声…...

游戏AI如何迁移战略逻辑到现实决策系统
1. 项目概述:当机器开始玩我们的游戏,背后不是炫技,而是逻辑的迁移“当机器开始玩我们的游戏”——这句话乍听像科幻片开场白,但现实中它早已不是新闻。AlphaGo击败李世石那盘棋之后,很多人以为AI下棋只是算法碾压人类…...

Mos:macOS 鼠标滚轮太生硬?这款免费开源工具让你的滚轮爽如触控板
如果你刚从 Windows 转到 macOS,或者习惯了 MacBook 触控板丝滑的滚动体验,再插上鼠标用滚轮时,大概率会觉得哪里不对劲——网页一顿一顿地跳,代码编辑器里翻行像在打碟,哪怕是在备忘录里上下滑动,那种生涩…...

2026.5.21【MIPI D-PHY】一、D-PHY 简介
一、简介 MIPI:全称移动行业处理器接口(Mobile Industry Processor Interface)。MIPI是由MIPI联盟发起的为移动应用处理器制定的开放标准。 MIPI可分为物理层和逻辑层两大部分。 MIPI按照物理层(Physical Standard)划分…...

CANN-ATB多卡推理-昇腾NPU上Llama70B怎么切到8张卡
CANN-ATB多卡推理-昇腾NPU上Llama70B怎么切到8张卡 Llama2-70B 的权重 140GB,单张 Atlas 800I A2 的 64GB 显存放不下。ATB 的多卡推理用 Tensor Parallel 把模型切到多张 NPU 上,每张卡只存 1/N 的权重和 KV Cache。 Tensor Parallel 的切法 Llama2-70B…...
)
告别黑白DEM!GeoServer发布地形图的样式美化实战(附完整SLD代码)
告别黑白DEM!GeoServer发布地形图的样式美化实战(附完整SLD代码) 当你在GeoServer中发布DEM数据时,是否遇到过这样的困扰:明明精心准备了高程数据,预览时却只能看到一片单调的灰度图像?这种&quo…...

C++lambda表达式深入解析
Clambda表达式深入解析lambda表达式是C11引入的匿名函数特性,它提供了一种简洁的方式来定义内联函数对象,特别适合用于STL算法和回调函数。lambda表达式的基本语法包括捕获列表、参数列表、返回类型和函数体。#include #include #include #includevoid b…...

智能交易系统:如何用AI重塑你的投资决策流程?
智能交易系统:如何用AI重塑你的投资决策流程? 【免费下载链接】TradingAgents-CN 基于多智能体LLM的中文金融交易框架 - TradingAgents中文增强版 项目地址: https://gitcode.com/GitHub_Trending/tr/TradingAgents-CN 在量化投资的世界里&#x…...

企业级微服务架构解决方案:Abp Vnext Pro框架的5大技术优势解析
企业级微服务架构解决方案:Abp Vnext Pro框架的5大技术优势解析 【免费下载链接】abp-vnext-pro Abp Vnext 的 Vue 实现版本 项目地址: https://gitcode.com/gh_mirrors/ab/abp-vnext-pro Abp Vnext Pro是一个基于ABP框架和Vue.js技术栈构建的企业级开发平台…...

Universal Router与Express/Koa对比分析:选择最适合你的路由方案
Universal Router与Express/Koa对比分析:选择最适合你的路由方案 【免费下载链接】universal-router A simple middleware-style router for isomorphic JavaScript web apps 项目地址: https://gitcode.com/gh_mirrors/un/universal-router Universal Route…...