H266/VVC帧内预测编码技术概述
预测编码技术
预测编码(Prediction Coding)是指利用已编码的一个或多个样本值,根据某种模型或方法,对当前的样本值进行预测,并对样本真实值和预测值之间的差值进行编码。
视频中的每个像素看成一个信源符号,它通常与空域上或时域上邻近的像素具有较强的相关性,因此视频是一种有记忆信源。
预测编码技术通过预测模型消除像素间的相关性,得到的差值信号可以认为没有相关性,或者相关性很小,因此可以作为无记忆信源进行编码。
视频预测编码的主要思想是通过预测来消除像素间的相关性;主要分为帧内预测和帧间预测。
帧内预测:利用当前图像内已编码像素生成预测值。
帧间预测:利用当前图像之前已编码图像的重建像素生成预测值。
H266/VVC帧内预测编码过程
参考像素获取
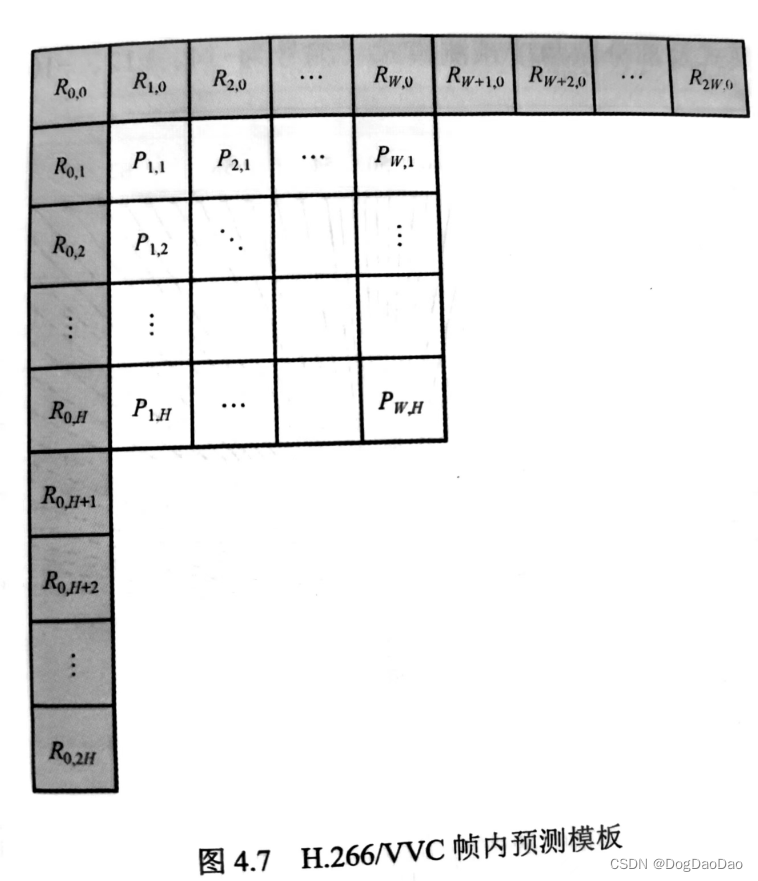
参考像素值获取模块对当前CU相邻参考像素是否可用进行判断。H266沿用大范围边界像素作为当前CU的参考,当参考像素不可用或不存在时使用默认值填充的方式得等到参考像素值。
H266引用多参考行内预测(Multiple Reference Line Intra Prediction, MRLP)技术,领域像素可选范围扩展到当前CU上侧三行和左侧三列。
得到邻域像素后,进行平滑滤波或差值滤波,引入模式依赖的帧内平滑(Mode Dependent Smoothing,MDIS)技术,根据预测模式和CU尺寸进行不同的滤波处理。
参考像素范围
单参考行像素:
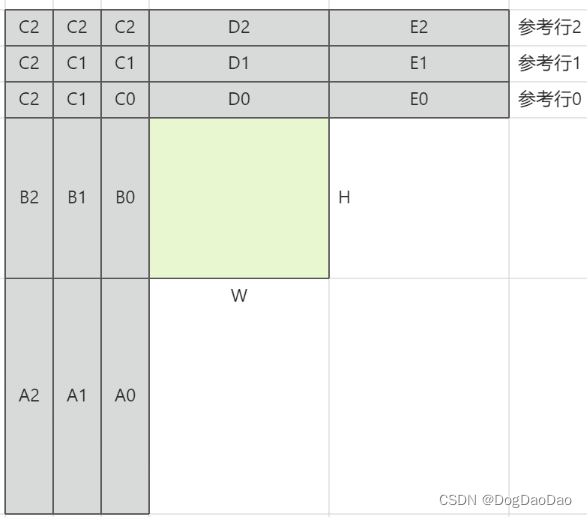
当参考像素不存在或者不可用时(比如图像边界、Slice边界、Tile边界或尚未编码块),H266使用最邻近的像素进行填充,比如下图A的参考像素不存在,则A所有像素都用B的最下方的像素进行填充。

如果所有区域参考像素都不可用,则用固定值填充;公式Mid=1<<(bitdepth-1);如果像素比特深度是8,则固定值是128,如果是10,则固定值是512;比如第一个CU的参考像素就是用固定值填充。
多参考行像素:
MRLP技术允许使用邻近的3行(列)参考像素,选择其中的1行(列)生成预测值,对于不存在或者不可用的像素,采用于单行相同的填充方式。
为了平衡性能,仅允许MPM列表中的模式使用MRLP技术。
参考像素滤波
MDIS 包含3种滤波器。满足条件下的整数平滑滤波、非整像素下的三次插值滤波器、非整像素的高斯插值滤波器。
整数平滑滤波:
是否对参考像素进行滤波由当前CU的大小、预测模式等条件,需要同时满足如下表格中的五个条件才能使用平滑滤波。
| 序号 | 条件 |
|---|---|
| 1 | 参考行限制:预测过程使用单参考行像素 |
| 2 | 大小限制:当前CU包含像素的个数大于32 |
| 3 | 仅对亮度分量使用 |
| 4 | 不使用ISP模式 |
| 5 | 模式限制:当前CU选择的模式属于Planar模式或者对角模式 |
滤波方法为3抽头滤波器,抽头系数为[0.25, 0.5, 0.25]。
三次插值滤波器:
在非整像素可以保留更多的细节纹理,满如条件中(使用了MRLP技术或ISP技术、使用了Planar模式或对角模式、 Distmin <=Thr[n] )其中一个即可使用。
高斯插值滤波器:
滤波效果更加平滑,应用更加广泛,不满足三次插值滤波器时使用。
预测值计算
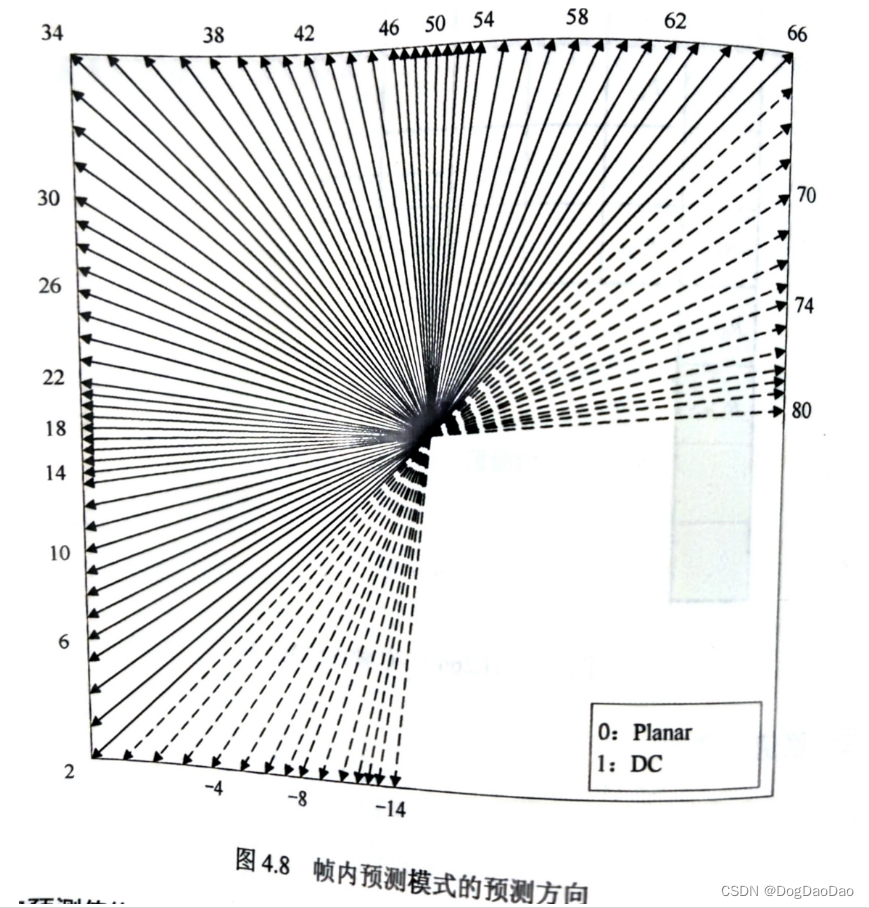
根据参考像素值,采用特定的预测模式计算待编码CU每个像素的预测值。H266将角度预测模式扩展到了65种,加上DC模式和Planar模式一共67种模式称为传统预测模式。
针对宽高不等的方形CU,宽角度帧内预测(Wide Angle Intra Prediction,WAIP)技术表达了更多的预测方向,模式编码扩展[-14, 80]。
H266还引入了基于矩阵的帧内预测(Matrix-based Intra Prediction,MIP)技术,借助神经网络离线训练得到的多个权重矩阵生成预测值,对传统预测模式有效补充。
Planar模式:
编号0,适用于像素值缓慢变化的区域,其预测像素可以看成是水平、垂直两个方向预测值的平均值。
DC模式:
编号1,适用于大面积平坦区域,DC模式需要计算出当前CU左侧及上方参考像素的平均值。
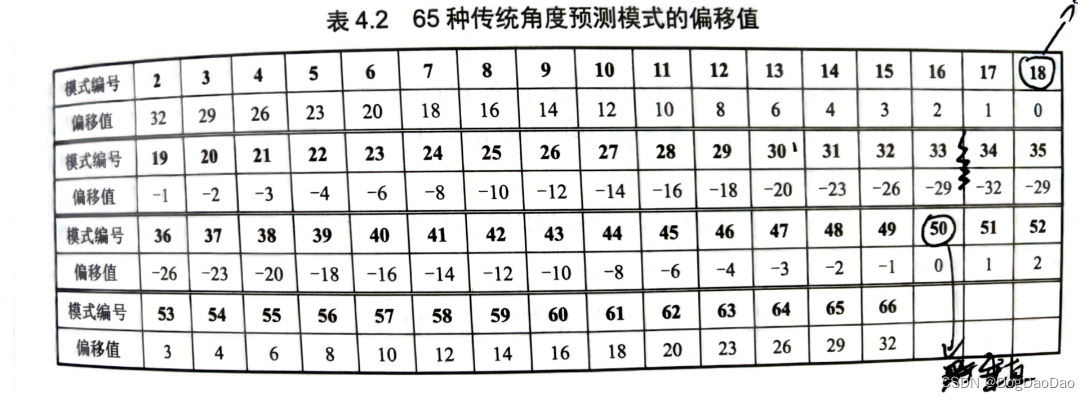
传统角度模式:
位于-135°~45°内,水平类模式编号为2 ~ 33,垂直类编号34 ~ 66;每种角度预测模式都相当于在水平或垂直方向做了角度偏移,如下表。
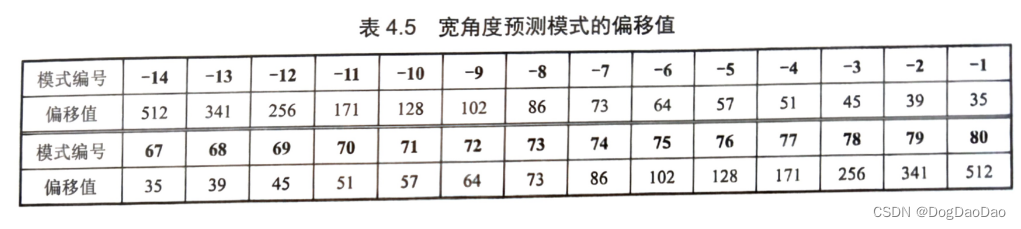
宽角度预测模式:
在H266中,二叉树划分和三叉树划分都会导致非方形CU的出现,传统的角度模式范围可能会限制非方形CU对参考像素的选择。相应的角度偏移如下表。
针对非方形CU,增加宽角度预测模式后,仍使用65重候选角度预测模式,即增加的宽角度预测模式替换了部分传统角度预测模式;一般会根据宽高比来替换不同的传统角度编号。
基于矩阵的预测模式:
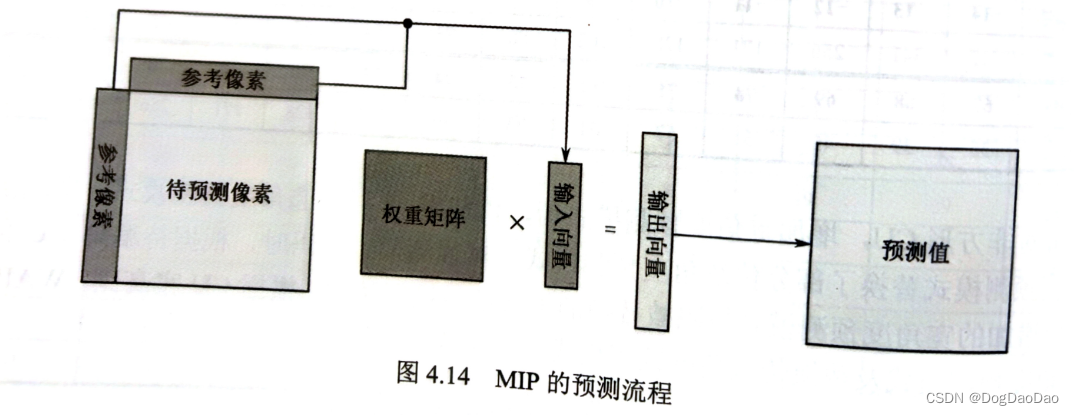
传统预测模式及宽角度预测模式都是以像素映射或线性渐变方式计算预测值,无法对不规则纹理做出有效的预测。H266标准使用了MIP技术,采用离线训练神经网络的方法,得到多个固定的权重矩阵,进而利用权重矩阵计算预测值。
参考像素经过处理后得到输入向量,输入向量与权重矩阵相乘得到输出向量,经过进一步排列和上采样得到待编码CU的预测值,如下图流程。
预测值修正
基于像素距离对部分帧内预测模式的预测值进行修正,H266/VVC使用了位置相关的帧内预测组合(Position Dependent Intra Prediction Combination,PDPC)技术,借助不同位置的参考像素值修正预测值。
该技术将参考像素与预测像素之间的距离作为权重计算修正值,再与预测值加权计算的得到最终的预测值,该过程称为预测值修正。
PDPC技术仅对部分预测模式进行修正,具体包括Planar模式、DC模式、编号[2, 18]和编号[50, 66]内的角度预测模式。
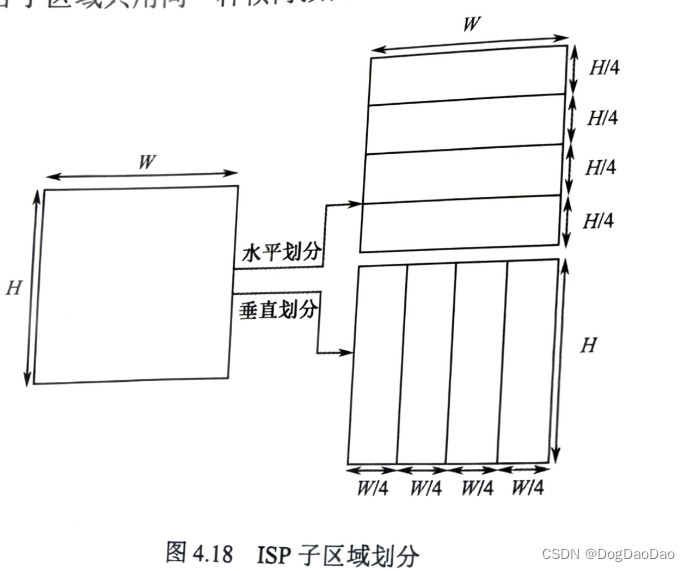
帧内子区域划分(Intra Sub-Partitions, ISP)技术
ISP技术旨在充分利用与待预测像素距离相近的参考像素进行预测。根据编码块得到大小,将亮度帧内预测块垂直划分或水平划分为若干个子区域,并按照从左到右、从上到下的额顺序依次进行编码及重建。
ISP技术使得帧内预测编码可以基于CU子区域进行,前一个子区域编码之后的重建像素为下一个子区域提供参考,各子区域共用同一种帧内预测模式。
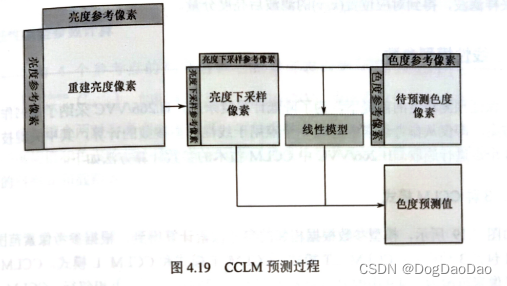
分量间线性模型预测(Cross-Component Linear Model Prediction, CCLM)技术
在H266中,CU色度分量进行预测编码前,亮度分量已经完成编码获得亮度重建值,因此亮度分量可以作为色度分量预测的参考信息。CCLM技术通过参考像素的亮度重建值和色度重建值建立分量间线性关系,根据待预测像素的亮度重建值计算色度预测值,过程如下图。
亮度分量的最可能模式(Most Probable Mode,MPM)技术
MPM技术充分利用相邻块预测模式之间的相关性,来进行亮度预测模式的编码。
色度分量亮度派生模式(Derived Mode,DM)技术
针对色度预测模式编码,H266使用了DM模式,即直接使用对应位置的亮度预测查模式信息。
H266/VVC帧内预测编码工具使用限制条件
| 帧内编码工具 | 使用限制说明 |
|---|---|
| MRLP | 仅在MPM模式中使用、禁用PDPC技术、ISP技术不应用 |
| MDIS | 仅应用于亮度分量、仅部分模式应用、MIP技术不应用、CCLM技术不应用 |
| WAIP | CU宽高比不为1时可以应用 |
| MIP | 色度分量受限使用、禁用MDIS技术、禁用MRLP技术、禁用PDPC技术、ISP技术不应用 |
| PDPC | 仅部分模式应用、ISP技术受限应用、MRLP技术不应用、MIP模式不应用 |
| ISP | 仅应用于亮度分量、禁用MRLP技术、禁用MIP技术、PDPC技术受限应用 |
| CCLM | 仅应用于色度分量、禁用MDIS技术、禁用MRLP技术、禁用PDPC技术 |
| MPM | 仅应用于亮度编码过程 |
| DM | 仅应用于色度编码过程 |
参考
JVET输出文档: https://www.itu.int/wftp3/av-arch/jvet-site/
书籍: 新一代通用视频编码H266/VVC:原理、标准与实现[万帅 霍俊彦 马彦卓 杨付正/著]
备注
本系列博客主要是对《新一代通用视频编码H266/VVC:原理、标准与实现》的学习笔记。
相关文章:
H266/VVC帧内预测编码技术概述
预测编码技术 预测编码(Prediction Coding)是指利用已编码的一个或多个样本值,根据某种模型或方法,对当前的样本值进行预测,并对样本真实值和预测值之间的差值进行编码。 视频中的每个像素看成一个信源符号ÿ…...

重组蛋白表达系统的比较-卡梅德生物
一、重组蛋白表达是什么? 重组蛋白表达是通过基因工程手段将目标蛋白基因导入宿主细胞,使其表达出特定的蛋白。该过程包括以下步骤: 1. 构建表达载体:将目标蛋白基因插入表达载体中,通常选择带有启动子、终止子和选择…...
【Java、Python】获取电脑当前网络IP进行位置获取(附源码)
我相信看到这篇博客的时候心里肯定是想解决自己的一个问题的,而这篇博客我就以简单快速的方式解决这些烦恼! 一、获取当前IP 在Java中自带了一些自己的流对象来获取当前的IP地址,不多说我们直接上代码。 //获取当前网络ip地址 ipAddress Ine…...

接口测试学习笔记
文章目录 认识urlhttp协议接口规范Postman实现接口测试设计接口测试用例使用软件发送请求并查看响应结果Postman 自动关联Postman如何提交multipart/form-data请求数据Postman如何提交查询参数Postman 如何批量执行用例单接口测试Postman 断言Postman参数化 接口测试自动化requ…...

一起玩儿物联网人工智能小车(ESP32)——14. 用ESP32的GPIO控制智能小车运动起来(二)
摘要:本文主要讲解如何使用Mixly实现对单一车轮的运动控制。 下面就该用程序控制我们的小车轮子转起来了。打开Mixly软件,然后单击顶部“文件”菜单中的“新建”功能,我们来开启一个新程序的开发工作。 我们的工作同样是先从最简单的开始&am…...

[PyTorch][chapter 8][李宏毅深度学习][DNN 训练技巧]
前言: DNN 是神经网络的里面基础核心模型之一.这里面结合DNN 介绍一下如何解决 深度学习里面过拟合,欠拟合问题 目录: DNN 训练常见问题 过拟合处理 欠拟合处理 keras 项目 一 DNN 训练常见问题 我们在深度学习网络训练的时候经常会遇到下面…...
Nginx快速入门:实现企业安全防护|nginx部署https,ssl证书(七)
0. 引言 之前我们讲到nginx的一大核心作用就是实现企业安全防护,而实现安全防护的原理就是通过部署https证书,以此实现参数加密访问,从而加强企业网站的安全能力。 nginx作为各类服务的统一入口,只需要在入口处部署一个证书&…...
将Go语言开发的Web程序部署到K8S
搭建K8S基础环境 如果已经有K8S环境的同学可以跳过,如果没有,推荐你看看我的《Ubuntu22加Minikue搭建K8S环境》,课程目录如下: Ubuntu22安装Vscode 下载:https://code.visualstudio.com/Download 安装命令&#…...

Python发送数据到Unity实现
Unity设置: 打开Unity项目。创建一个空的GameObject,并附加一个新的脚本TCPReceiver using System.Net; using System.Net.Sockets; using System.Text; using UnityEngine; using System.Threading;public class MyListener : MonoBehaviour {Thread thread;pub…...
)
Unity 渲染顺序受哪些影响(相机depth、SortingLayer、Render Queue、透明)
目录 相机深度(Camera Depth) Clear Flags 多相机渲染不同部分 SortingLayer 先后顺序 Render Queue Render Queue的作用 Render Queue的分类 GeometryLast(值为2500) 渲染顺序总结 相机深度(Camera Depth&am…...
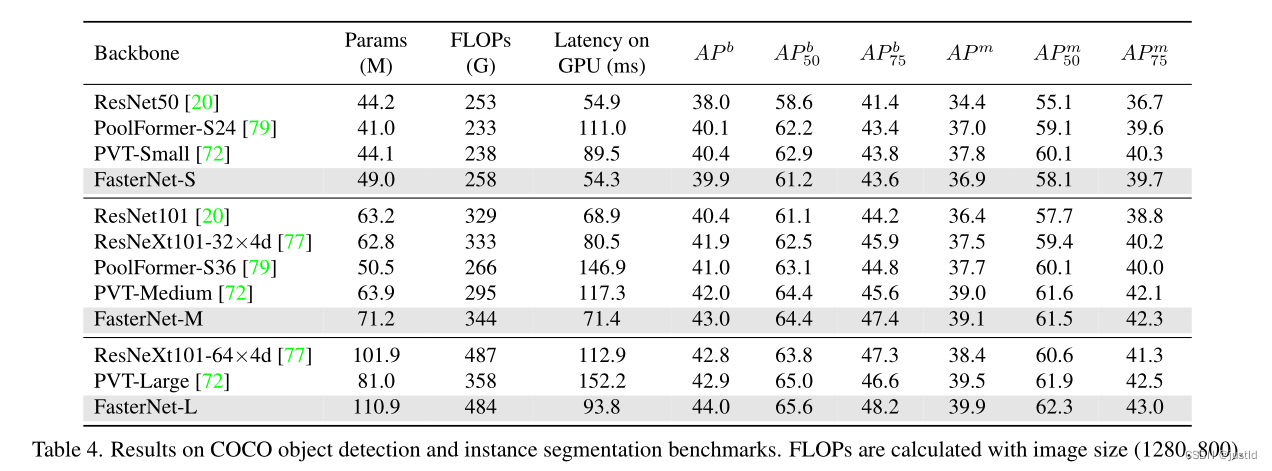
【论文笔记】Run, Don’t Walk: Chasing Higher FLOPS for Faster Neural Networks
论文地址:Run, Dont Walk: Chasing Higher FLOPS for Faster Neural Networks 代码地址:https://github.com/jierunchen/fasternet 该论文主要提出了PConv,通过优化FLOPS提出了快速推理模型FasterNet。 在设计神经网络结构的时候ÿ…...

python常用函数汇总
python常用函数汇总 对准蓝字按下左键可以跳转哦 类型函数数值相关函数abs() divmod() max() min() pow() round() sum()类型转换函数ascii() bin() hex() oct() bool() bytearray() bytes() chr() complex() float() int() 迭代和循环函数iter() next() e…...
阶段十-物业项目
可能遇到的错误: 解决jdk17javax.xml.bind.DatatypeConverter错误 <!--解决jdk17javax.xml.bind.DatatypeConverter错误--><dependency><groupId>javax.xml.bind</groupId><artifactId>jaxb-api</artifactId><version>…...
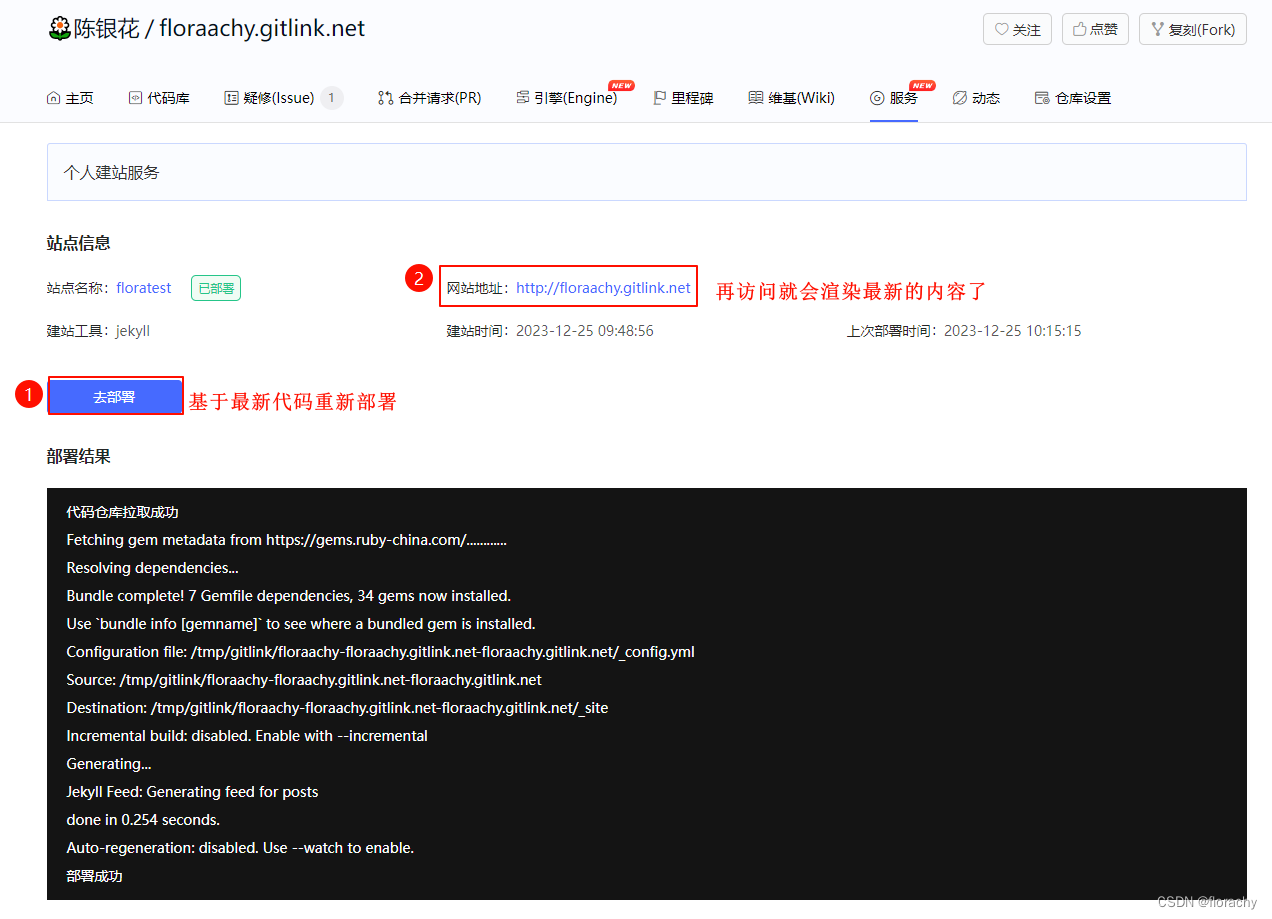
使用 Jekyll 构建你的网站 - 初入门
文章目录 一、Jekyll介绍二、Jekyll安装和启动2.1 配置Ruby环境1)Windows2)macOS 2.2 安装 Jekyll2.3 构建Jekyll项目2.4 启动 Jekyll 服务 三、Jekyll常用命令四、目录结构4.1 主要目录4.2 其他的约定目录 五、使用GitLink构建Jekyll博客5.1 生成Jekyll…...

【数据库】postgressql设置数据库执行超时时间
在这篇文章中,我们将深入探讨PostgreSQL数据库中的一个关键设置:SET statement_timeout。这个设置对于管理数据库性能和优化查询执行时间非常重要。让我们一起来了解它的工作原理以及如何有效地使用它。 什么是statement_timeout? statemen…...

SQL语言之DDL
目录结构 SQL语言之DDLDDL操作数据库查询数据库创建数据库删除数据库使用某个数据库案例 DDL操作表创建表查看表结构查询表修改表添加字段删除字段修改字段的类型修改字段名和字段类型 修改表名删除表案例 SQL语言之DDL DDL:数据定义语言,用来定义数…...
)
hive高级查询(2)
-- 分组查询 SELECT sex,SUM(mark) sum_mark FROM score GROUP BY sex HAVING sum_mark > 555; SELECT sex,sum_mark FROM( SELECT sex,SUM(mark) sum_mark FROM score GROUP BY sex ) t WHERE sum_mark > 555; SELECT AVG(gid),SUM(gid)/COUNT(gid) FROM …...
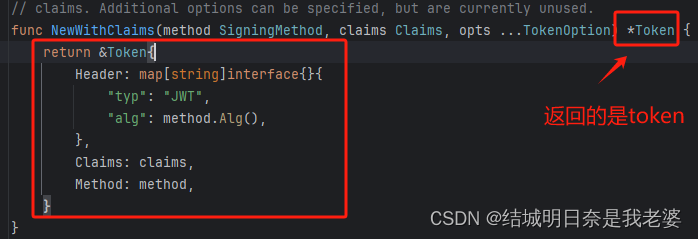
golang的jwt学习笔记
文章目录 初始化项目加密一步一步编写程序另一个参数--加密方式关于StandardClaims 解密解析出来的怎么用关于`MapClaims`上面使用结构体的全代码实战项目关于验证这个项目的前端初始化项目 自然第一步是暗转jwt-go的依赖啦 #go get github.com/golang-jwt/jwt/v5 go get githu…...

第十五节TypeScript 接口
1、简介 接口是一系列抽象方法的声明,是一些方法特征的集合,这些方法都应该是抽象的,需要有由具体的类去实现,然后第三方就可以通过这组抽象方法调用,让具体的类执行具体的方法。 2、接口的定义 interface interface_…...
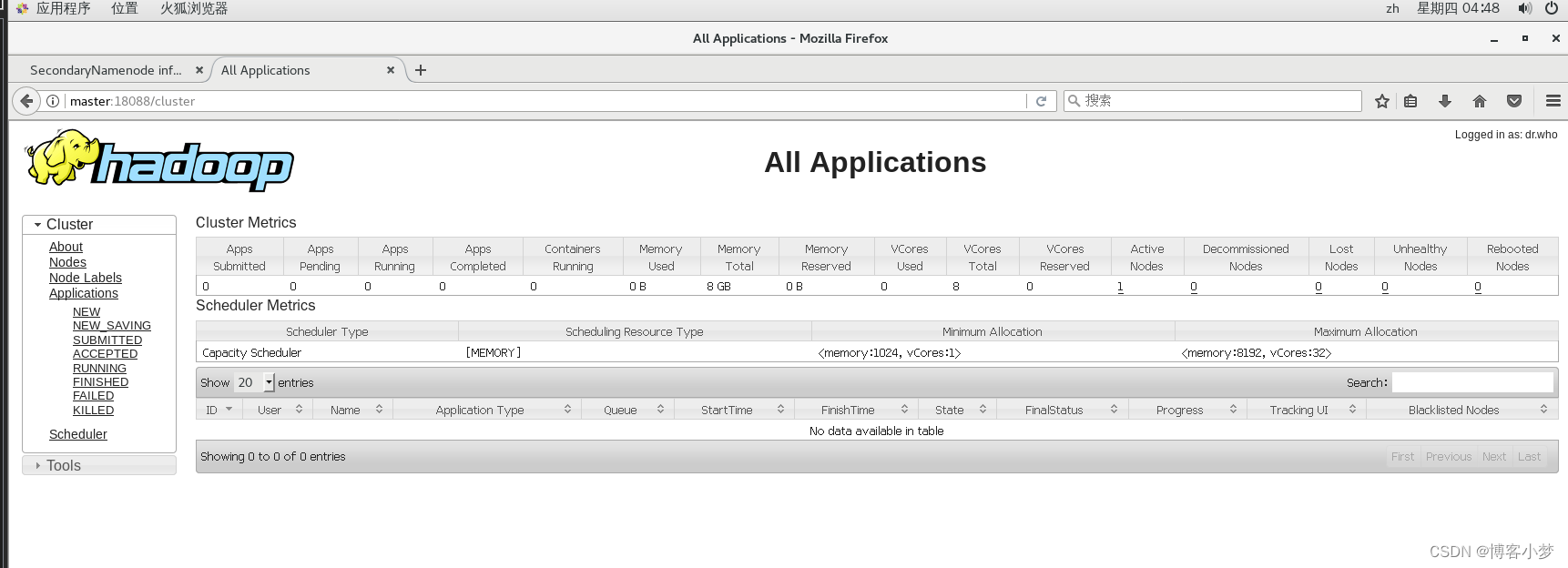
【hadoop】解决浏览器不能访问Hadoop的50070、8088等端口?!
【hadoop】解决浏览器不能访问Hadoop的50070、8088等端口?!😎 前言🙌【hadoop】解决浏览器不能访问Hadoop的50070、8088等端口?!查看自己的配置文件:最终成功访问如图所示: 总结撒花…...

ElevenLabs广东话语音商用避坑清单:92%开发者忽略的版权边界、方言标注规范与GDPR合规红线
更多请点击: https://kaifayun.com 第一章:ElevenLabs广东话语音商用落地的现实困局 ElevenLabs 作为全球领先的AI语音生成平台,其英语、西班牙语等主流语言模型已广泛应用于客服、播客与教育场景。然而,当尝试将其语音合成能力延…...

GitHub Desktop汉化工具:轻松掌握中文界面切换的完整指南
GitHub Desktop汉化工具:轻松掌握中文界面切换的完整指南 【免费下载链接】GitHubDesktop2Chinese GithubDesktop语言本地化(汉化)工具 【GitHub桌面客户端中文汉化】 项目地址: https://gitcode.com/gh_mirrors/gi/GitHubDesktop2Chinese 还在为GitHub Desk…...

如何在Windows系统中创建虚拟游戏手柄?vJoy开源项目完全指南
如何在Windows系统中创建虚拟游戏手柄?vJoy开源项目完全指南 【免费下载链接】vJoy Virtual Joystick 项目地址: https://gitcode.com/gh_mirrors/vj/vJoy 你是否曾因缺少物理游戏手柄而无法体验某些经典游戏?或者需要为专业软件创建自定义控制方…...

Test-Agent:企业级AI测试平台的战略价值与团队转型路径
Test-Agent:企业级AI测试平台的战略价值与团队转型路径 【免费下载链接】Test-Agent Agent that empowers software testing with LLMs; industrial-first in China 项目地址: https://gitcode.com/gh_mirrors/te/Test-Agent 在数字化转型浪潮中,…...

8255与74LS273实现流水灯控制原理
箱图片和题目要求,这是一个经典的微机原理/接口技术实验。你需要构建一个包含输入(开关)、处理(8255读取)、输出(74LS273锁存驱动LED)的系统。由于我无法直接为你绘制CAD图纸,我为你…...

AI原生组织:从「加AI功能」到「长AI基因」,大企业实践与中小团队轻量思路揭秘
AI原生组织:从「加AI功能」到「长AI基因」的本质跃迁与落地路径AI原生组织并非给传统企业贴AI膏药,而是围绕人机协同重新设计业务逻辑、组织架构和激励机制。下面从认知误区切入,结合阿里、华为、传神等企业案例,拆解AI原生组织的…...

智能图像分层革命:5分钟将任何图片转换为可编辑PSD图层
智能图像分层革命:5分钟将任何图片转换为可编辑PSD图层 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 你是否曾面对一张精美的插画ÿ…...

深度解析 SGLang 框架 Wan2.1 视频生成加速技术:从 49 分钟到 1 分钟的极致优化
Wan2.1 作为当前开源视频生成模型的标杆,其 14B 参数版本在生成质量上已经达到了商业级水准,但原生推理速度却令人望而却步:单卡 A800 生成一段 5 秒 720P 视频需要近 50 分钟。 本文基于真实生产环境的运行日志和 SGLang 源码深度分析&…...

图片去水印软件哪个好用?2026免费工具对比测评|电脑手机全覆盖
去水印已经成为日常生活中的高频需求。无论是保存心仪的社交媒体内容、优化电商产品图片,还是整理个人素材库,一张带着平台水印的图片往往无法直接使用。但面对市面上琳琅满目的去水印方案,很多人都有同样的疑问:到底哪款软件最实…...

深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进
深度解析猫抓Cat-Catch:从浏览器资源嗅探到流媒体处理的技术架构演进 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓Cat-Catch作为…...