自动驾驶中的“雷达”
自动驾驶中有好几种雷达,新手可能会混淆,这里统一介绍一下它们。
首先,所有雷达的原理都是发射波,接收回波(可能是声波或电磁波),并通过发射和接收的时间差以及波的速度计算距离。只不过发射的波不同,功能也不同。
激光雷达 Lidar
Lidar,Light Detection And Ranging 是激光探测及测距系统的简称,主要构成要素包括发射系统、接收系统和信号处理系统。
激光雷达主动发射波长约为900-1500nm的激光射线,波长短
激光雷达的文章网上太多了,这里贴一个质量比较好的
毫米波雷达 Radar
millimeter-wave radar
国际电信联盟(ITU)发布的《无线电规则》(2020 年)和我国《无线电频率划分规定》中,将无线电频率在 30-300GHz 的频段(波长 1-10mm)称呼为毫米波频段。

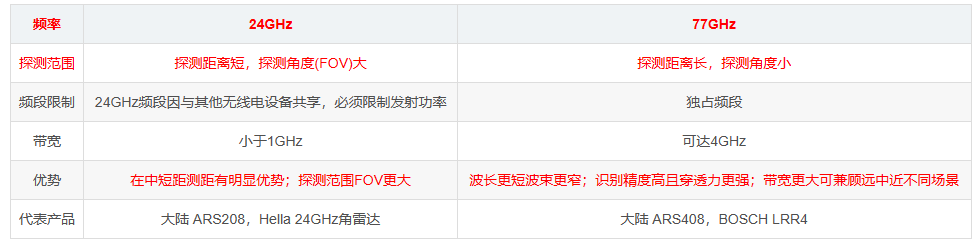
毫米波雷达使用的电磁波波长介于1-10mm,波长短、频段宽,比较 容易实现窄波束,雷达分辨率高,不易受干扰。目前国内使用的 24GHz、60GHz、77GHz、80GHz 等雷达产品统归为毫米波雷达。


在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(Frequency Modulated Continuous Wave, FMCW),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。
主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度。
测量角度是通过计算不同天线单元之间的延时差来计算。
毫米波雷达的三个基本功能即为测距,测速,测角,由于测距精度较高,AEB常用毫米波雷达来做。
毫米波雷达的成本一般在几千元不等。
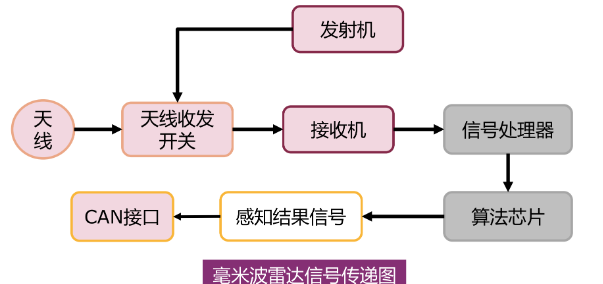
毫米波雷达一般通过CAN接入。
所谓4D毫米波雷达,是通过测量目标的距离、速度、方位角和高度,对目标进行精准辨别。
相比于激光雷达,毫米波雷达的优势是成本低,体积小,受恶劣天气的影响更小。毫米波雷达是L0~L2的ADAS功能中十分常用的传感器。
超声波雷达 USS
USS,Ultrasonic Sensor System,检测原理是发射超声波,检测回波,通过时间差测距。这也是蝙蝠所使用的测距原理。
关于超声波雷达的原理、分类和安装示意我之前写过一篇简单的文章
超声波雷达理论上对所有能够反射超声波的物体管用,包括固体和液体,但是如果目标物体是一个有角度的、能够将声波反射向其他角度的平面,或者是能够吸收超声波的海绵、泡沫等物体,超声波雷达的检测能力会受到影响。
按照检测距离,主要分为两类:LRU(Long Range Unit),检测距离通常在30-500cm,也有的能够超过700cm,检测角度较小,通常作为APA(Active Park Assist System)传感器安装在车身侧面;SRU(Short Range Unit),检测距离通常在15-250cm,通常作为UPA(Ultrasonic Park Assist System)传感器安装在前后保险杠。
一般的工作频率分为40kHz、48kHz和58kHz三种。频率越高其灵敏度越高,但是水平与垂直方向的探测角度就越小,所以常常使用的是40kHz的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在0.1-3米之间,而且精度较高,因此非常适合应用于泊车。车上的小圆点就是它。
超声波雷达的成本极低,最低可能在10元左右。
所谓倒车雷达一般也指超声波雷达。
超声波雷达一般通过CAN接入。
相关文章:
自动驾驶中的“雷达”
自动驾驶中有好几种雷达,新手可能会混淆,这里统一介绍一下它们。 首先,所有雷达的原理都是发射波,接收回波(可能是声波或电磁波),并通过发射和接收的时间差以及波的速度计算距离。只不过发射的…...
Web 3.0 是什么
第 1 章 明晰Web 3.0 从本章开始,就进入了本书的第一篇章,入门Web3.0,在第一篇章中将会让读者对Web3.0有一个整体的认知,为学习后面的章节打下基础。 在本章中,主要介绍的是Web的发展历史,包涵Web1.0、Web2.0、Web3.0的发展过程,以及资本为什么需要入场Web3.0、Web3.0…...

四种NAT的网络结构
四种NAT的网络结构 引言1 完全圆锥型NAT2 IP限制圆锥型NAT3 Port限制圆锥型NAT4 对称型NAT5 总结 引言 NAT是将内网地址映射转换为外网地址的一种地址转换方式,这节省了有限的IP地址资源。一般来讲,分为对称型NAT和圆锥形NAT,其中圆锥形NAT又…...
Android studio 使用greenDao根据实体类生成dao类
1.遇到的问题 使用android studio根据实体类生成dao其实也很简单,你只要实现 Parcelable Entity public class ConfigDataModel implements Parcelable {Id(autoincrement true)private Long id null; } 2.使用自带的方法生成 使用build-->make Project生成 …...

redis 从0到1完整学习 (九):SkipList 数据结构
文章目录 1. 引言2. redis 源码下载3. skipList 数据结构4. 参考 1. 引言 前情提要: 《redis 从0到1完整学习 (一):安装&初识 redis》 《redis 从0到1完整学习 (二):redis 常用命令》 《re…...

智能优化算法应用:基于金豺算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于金豺算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于金豺算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.金豺算法4.实验参数设定5.算法结果6.参考文献7.MA…...
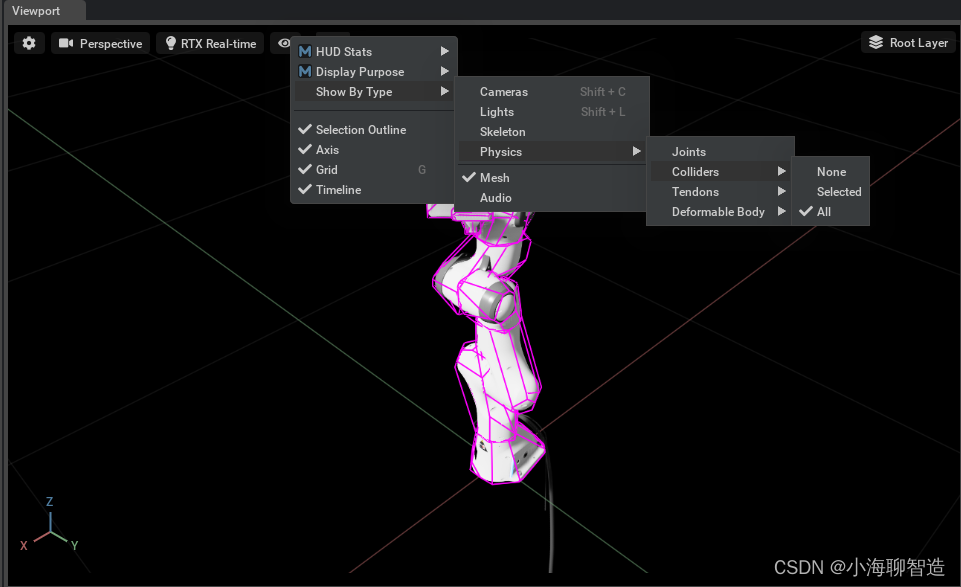
Isaac Sim 仿真机器人urdf文件导入
本教程展示如何在 Omniverse Isaac Sim 中导入 urdf 一. 使用内置插件导入urdf 安装urdf 插件 方法是转到“window”->“Extensions” 搜索框中输入urdf, 并启用 通过转至Isaac Utils -> Workflows -> URDF Importer菜单来访问 urdf 扩展。 表格中的 1,2,3 对应着…...
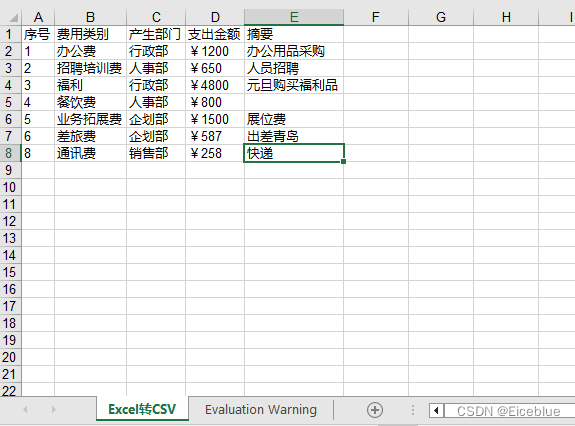
Python 实现Excel和CSV之间的相互转换
通过使用Python编程语言,编写脚本来自动化Excel和CSV之间的转换过程,可以批量处理大量文件,定期更新数据,并集成转换过程到自动化工作流程中。本文将介绍如何使用第三方库Spire.XLS for Python 实现: 使用Python将Exc…...
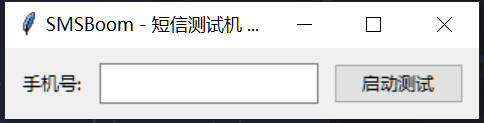
【GitHub精选项目】短信系统测试工具:SMSBoom 操作指南
前言 本文为大家带来的是 OpenEthan 开发的 SMSBoom 项目 —— 一种用于短信服务测试的工具。这个工具能够发送大量短信,通常用于测试短信服务的稳定性和处理能力。在合法和道德的范畴内,SMSBoom 可以作为一种有效的测试工具,帮助开发者和系统…...

【Filament】立方体贴图(6张图)
1 前言 本文通过一个立方体贴图的例子,讲解三维纹理贴图(子网格贴图)的应用,案例中使用 6 张不同的图片给立方体贴图,图片如下。 读者如果对 Filament 不太熟悉,请回顾以下内容。 Filament环境搭建绘制三角…...

SpringBoot 3.2.0 结合Redisson接入Redis
依赖版本 JDK 17 Spring Boot 3.2.0 Redisson 3.25.0 工程源码:Gitee 集成Redis步骤 导入依赖 <properties><redisson.version>3.25.0</redisson.version> </properties> <dependencies><dependency><groupId>org.pr…...

C++ 比C语言增加的新特性 5 之字符串string
1. c 的string类型 1.1 创建和初始化字符串 string.cpp #include "iostream" #include <string>using namespace std;//创建和初始化字符串 int main() {// 初始化空字符串string emptyString;// 使用字符串字面量初始化字符串string greeting "hello, …...

【第2讲】原理介绍和权限开通
系列文章目录 第1讲:Python环境的下载和安装第2讲:免费开通权限第3讲:1行代码,自动发正文第4讲:1行代码,自动发正文+附件第5讲:自动批量发送第6讲:1行代码,自动下载邮件的附件提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 系列文章目录…...

C++ opencv-3.4.1 提取不规则物体的轮廓
在学习opencv的时候,对一张照片,需要标注照片上物体的不规则轮廓。 如图: 使用opencv进行物体的轮廓处理,关键在于对照片的理解,前期的照片处理的越好最后调用api出来的结果就越接近理想值。 提取照片中物体分如下三步ÿ…...
ServletConfig对象.
是什么 ServletConfig是javax.servlet.包下的一个接口,ServletConfig它是Servlet的一个配置对象; ServletConfig是由tomcat容器创建,通过init方法传入给Servlet; ServletConfig对象如何获取? 在GenericServlet里面定义了&#x…...
jQuery实现框里画面的展开、收起和停止
jQuery实现框里画面的展开、收起和停止 主要用到动画效果中的三个操作: (“id”).slideDown(3000); // 后面的数字表示效果的时长 (“id”).stop(); (“id”).slideUp(3000); 效果图 代码如下: <!DOCTYPE html> <html lang"en…...
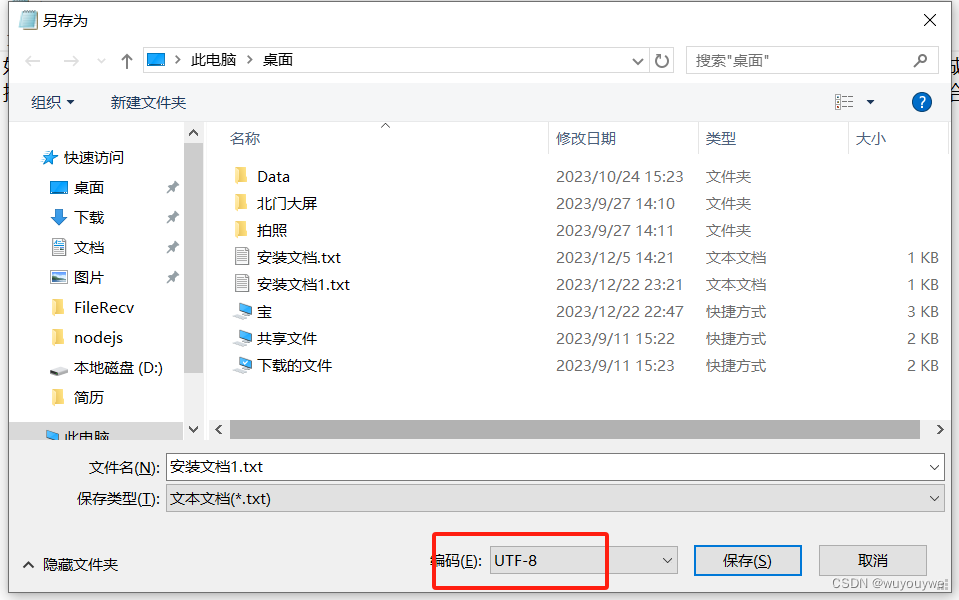
less 查看文本时,提示may be a binary file.See it anyway?
解决办法 首先使用echo $LESSCHARSET查看less的编码 看情况设置less的编码格式(我的服务器上使用utf-8查看中文) 还要特别注意一下,Linux中存在的文本文件的编码一定要是utf - 8;(这一步很关键) 例如:要保证windows上传到Linux的…...
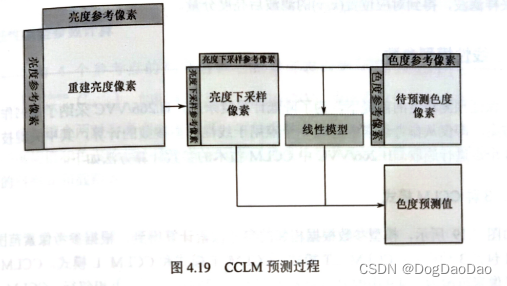
H266/VVC帧内预测编码技术概述
预测编码技术 预测编码(Prediction Coding)是指利用已编码的一个或多个样本值,根据某种模型或方法,对当前的样本值进行预测,并对样本真实值和预测值之间的差值进行编码。 视频中的每个像素看成一个信源符号ÿ…...

重组蛋白表达系统的比较-卡梅德生物
一、重组蛋白表达是什么? 重组蛋白表达是通过基因工程手段将目标蛋白基因导入宿主细胞,使其表达出特定的蛋白。该过程包括以下步骤: 1. 构建表达载体:将目标蛋白基因插入表达载体中,通常选择带有启动子、终止子和选择…...
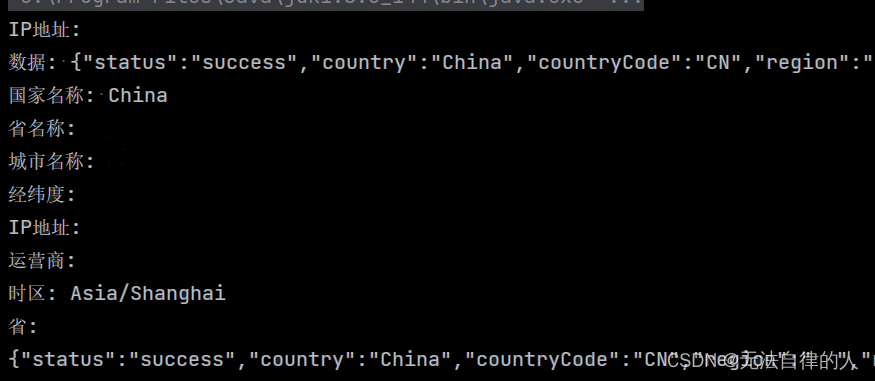
【Java、Python】获取电脑当前网络IP进行位置获取(附源码)
我相信看到这篇博客的时候心里肯定是想解决自己的一个问题的,而这篇博客我就以简单快速的方式解决这些烦恼! 一、获取当前IP 在Java中自带了一些自己的流对象来获取当前的IP地址,不多说我们直接上代码。 //获取当前网络ip地址 ipAddress Ine…...

Agent生产费用智能管控与超支预警功能配置:2026企业级ROI重塑指南
在2026年5月的当下,全球人工智能产业已从“大模型参数竞赛”全面转向“智能体(Agent)价值落地阶段”。根据2026年5月21日最新的行业数据显示,企业对Agent的投入已占到其IT预算的35%以上。然而,随着Agent系统从实验性De…...
 架构设计)
Data Connection (数据连接) 架构设计
description: “移动数据连接 (Data Connection) 与 PDN 会话架构设计,深入剖析 DataNetwork 状态机、数据可用性评估引擎、重试退避算法、以及跨 APN 的并发管理策略。” 当手机完成网络注册(ServiceStateTracker 确定已注册到运营商网络)后,用户最关心的一件事就是:能不…...

深度解析EdiZon:Switch游戏存档管理与内存编辑的进阶实战指南
深度解析EdiZon:Switch游戏存档管理与内存编辑的进阶实战指南 【免费下载链接】EdiZon 💡 A homebrew save management, editing tool and memory trainer for Horizon (Nintendo Switch) 项目地址: https://gitcode.com/gh_mirrors/ed/EdiZon 在…...

9大网盘直链下载助手:告别限速,免费实现高速下载自由
9大网盘直链下载助手:告别限速,免费实现高速下载自由 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云…...

RA6M3 HMI开发板SDHI接口与SD卡存储性能深度测评
1. 项目概述:从一块开发板到人机交互界面的探索最近在做一个工业现场数据监控终端的原型,核心需求是在一块屏幕上实时显示传感器数据、设备状态,并且能通过触摸屏进行简单的参数设置。选型的时候,瑞萨电子的RA6M3 HMI Board进入了…...

Triton Ascend 代码生成 Skill
【免费下载链接】cannbot-skills CANNBot 是面向 CANN 开发的用于提升开发效率的系列智能体,本仓库为其提供可复用的 Skills 模块。 项目地址: https://gitcode.com/cann/cannbot-skills name: triton-op-coding description: > Triton Ascend 算子代码生…...

深入解析Solana SPL Token:原理、生态与未来布局
深入解析Solana SPL Token:原理、生态与未来布局 引言 在追求高性能区块链的浪潮中,Solana以其惊人的交易速度和低廉的费用脱颖而出。而这一切,离不开其核心资产标准——SPL Token的支撑。无论是引爆市场的STEPN,还是承载万亿美…...

[qemu+kvm]: smmu stage 2 建立流程
1. qemu倡导 gpa和hpa映射关系在vm建立时不确定,在运行时触发缺页异常后建立映射关系(lazy binding)。 2. smmu stage 2要求 gpa和hpa的映射关系在vm建立时确定,若在运行时触发缺页,会导致dma失败(pcie ats…...

Wi-Fi/5G信号解码背后的数学:深入浅出图解LLR软解调原理
Wi-Fi/5G信号解码背后的数学:深入浅出图解LLR软解调原理 在数字通信的世界里,信号从发射端到接收端的旅程就像一场充满干扰的马拉松。当你的手机接收Wi-Fi或5G信号时,它获取的并不是完美的0和1序列,而是被噪声扭曲的"模糊版本…...

API 监控告警系统
LogMonitor - API监控告警系统 基于Python的智能API监控系统,集成Splunk日志分析和钉钉告警,支持多种API类型的实时监控和趋势分析。 代码地址 https://github.com/junbingliu007/log_monitor 功能特性 多API类型监控:支持多种API类型智…...