9.传统的轨道画线算法()
轨道画线分为以下步骤:
1.读取摄像头图片
2.图片灰度处理,截取轨道区域的图片
3.中值滤波处理,并区域取均值后做期望差的绝对值。本人通过一些轨道图片实验,用这种方法二值化得到的效果比caany算子等方法的效果好
4.二值化后再用DBSAN聚类算法对图片分类
5.对分好类的坐标在图片中画图
具体代码如下:
import numpy as np
import cv2colors = [ (0, 0, 0), (128, 0, 0), (0, 128, 0), (128, 128, 0), (0, 0, 128), (128, 0, 128), (0, 128, 128),(128, 128, 128), (64, 0, 0), (192, 0, 0), (64, 128, 0), (192, 128, 0), (64, 0, 128), (192, 0, 128),(64, 128, 128), (192, 128, 128), (0, 64, 0), (128, 64, 0), (0, 192, 0), (128, 192, 0), (0, 64, 128),(128, 64, 12)]def cluster(points, radius=100):"""points: pointcloudradius: max cluster range"""print("................", len(points))items = []while len(points)>1:item = np.array([points[0]])base = points[0]points = np.delete(points, 0, 0)distance = (points[:,0]-base[0])**2+(points[:,1]-base[1])**2#获得距离infected_points = np.where(distance <= radius**2)#与base距离小于radius**2的点的坐标item = np.append(item, points[infected_points], axis=0)border_points = points[infected_points]points = np.delete(points, infected_points, 0)#print("................",len(points))#print(border_points)while len(border_points) > 0:border_base = border_points[0]border_points = np.delete(border_points, 0, 0)border_distance = (points[:,0]-border_base[0])**2+(points[:,1]-border_base[1])**2border_infected_points = np.where(border_distance <= radius**2)#print("/",border_infected_points)item = np.append(item, points[border_infected_points], axis=0)for k in border_infected_points:if points[k] not in border_points:border_points=np.append(border_points,points[k], axis=0)#border_points = points[border_infected_points]points = np.delete(points, border_infected_points, 0)items.append(item)return items#2.图像的灰度处理、边缘分割
def mean_img(img):# gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)#1.图片的灰度,截取处理gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)imgss=img[540:743, 810:1035]gray_img = gray_img[540:741, 810:1030]#[540:741, 810:1080]img2=gray_imgprint(img2.mean())#中值滤波gray_img = cv2.medianBlur(gray_img, ksize=3)cv2.imshow("Dilated Image", gray_img)cv2.waitKey(0)#2.行做期望差,3个值取均值再做差for i in range(gray_img.shape[0]):for j in range(gray_img.shape[1]-2):ss1=gray_img[i, j:j+2].mean()m=abs(gray_img[i][j]-ss1)if m>13:img2[i][j] =255else:img2[i][j] =0img2[:,-3:]=0cv2.imshow("img_mean", img2)cv2.waitKey(0)# 3.腐蚀膨胀消除轨道线外的点kernel = np.uint8(np.ones((5, 2)))# 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方dilated = cv2.dilate(img2, kernel)#显示膨胀后的图像#dilated[:, -6:] = 0cv2.imshow("Dilated Image", dilated)cv2.waitKey(0)ss=np.argwhere(dilated>0)print(ss)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\120.jpg",dilated)#聚类算法items = cluster(ss, radius=5)print(len(items))i=0for item in items:print("====>", len(item))if len(item)>500:for k in item:imgss[k[0]][k[1]]=colors[i]i+=1cv2.imshow("ss",imgss)cv2.waitKey(0)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\121.jpg", imgss)return ss#3.画图
def draw_line(items):print(123)if __name__ == '__main__':img_path=r"D:\AI\project\eye_hand_biaoding\railways\img\1.jpg"img=cv2.imread(img_path)ss=mean_img(img)ss=np.array(ss)items=cluster(ss, radius=25)通过以上聚类的方法处理后的图片如下:

接下来对两类点进行处理。在这里目前想到的处理方式有两种:一是:首先对每个类取行的中值或者均值,即每个类的每行只保留一个坐标(均值或者中间值),去除掉了每行两边的坐标。但这个效果不太好,后面会附加代码和处理的图片结果;二是根据霍夫曼求直线的方法,自己重新写个获取直线。
一、取均值或者中值的代码如下:
import numpy as np
import cv2
from sklearn.linear_model import LinearRegression
import time#https://blog.csdn.net/L888666Q/article/details/127209464
#霍夫曼取直线原理:https://blog.csdn.net/fengjiexyb/article/details/78075888colors = [ (0, 0, 0), (128, 0, 0), (0, 128, 0), (128, 128, 0), (0, 0, 128), (128, 0, 128), (0, 128, 128),(128, 128, 128), (64, 0, 0), (192, 0, 0), (64, 128, 0), (192, 128, 0), (64, 0, 128), (192, 0, 128),(64, 128, 128), (192, 128, 128), (0, 64, 0), (128, 64, 0), (0, 192, 0), (128, 192, 0), (0, 64, 128),(128, 64, 12)]def cluster(points, radius=100):"""points: pointcloudradius: max cluster range"""print("................", len(points))items = []while len(points)>1:item = np.array([points[0]])base = points[0]points = np.delete(points, 0, 0)distance = (points[:,0]-base[0])**2+(points[:,1]-base[1])**2#获得距离infected_points = np.where(distance <= radius**2)#与base距离小于radius**2的点的坐标item = np.append(item, points[infected_points], axis=0)border_points = points[infected_points]points = np.delete(points, infected_points, 0)#print("................",len(points))#print(border_points)while len(border_points) > 0:border_base = border_points[0]border_points = np.delete(border_points, 0, 0)border_distance = (points[:,0]-border_base[0])**2+(points[:,1]-border_base[1])**2border_infected_points = np.where(border_distance <= radius**2)#print("/",border_infected_points)item = np.append(item, points[border_infected_points], axis=0)if len(border_infected_points)>0:for k in border_infected_points:if points[k] not in border_points:border_points=np.append(border_points,points[k], axis=0)#border_points = points[border_infected_points]points = np.delete(points, border_infected_points, 0)items.append(item)return itemsdef k_mean(out):print("........................开始计算图片的均值.....................")median = {}i = 1for items in out:median[str(i)] = []result = items[:, :-1]ss = result.shaperesult = result.reshape(ss[1], ss[0])result = result[0].tolist()result = list(set(result)) # 去掉result重复的值for m in result:#print("...............", m, "...............................")item = np.where(items[:, :-1] == m)[0]# median[str(i)].append(items[item[len(item)//2]].tolist()) #中位数,有用median[str(i)].append([m, int(items[item][:, -1:].mean())]) # 均值i += 1return median#直线的拟合
def lines(median,distances):print("...................直线的拟合......................")for items in median:n_m=np.array(median[items])#转换为array数据means=n_m[:,1:]#取坐标的第二列lens=n_m[-1][0]+1#总共多少个坐标,即坐标个数#print(lens)#1.获取x1,x2的坐标if lens%4>2:x10=lens//4+1else:x10 = lens // 4x20=x10*3x=lens//2#print("x1,x2: ",x10,x20)#2.获取y1,y2的坐标y10=means[:lens//2].mean()y20 = means[lens // 2-1:].mean()y=means.mean()#print("y1,y2: ", y10, y20)#3.获取直线斜率k k=(y1-y2)/(x1-x2)k=(y10-y20)/(x10-x20)#print("k: ",k)#print("x,y: ",x,y)#4.预测某个点的y值 y-pred=k*(x_pred-x)+y n_m[i]for i in range(len(n_m)):y_pred = k * (n_m[i][0] - x) + y#print("===>",y_pred,n_m[i][0],n_m[i][1])if abs(y_pred-n_m[i][1])>distances:n_m[i][1]=y_pred#median[items][i][1]=int(y_pred)median[items]=n_m.tolist()return median#2.图像的灰度处理、边缘分割
def mean_img(img,x1,x2,y1,y2):imgs=img.copy()img4 = img.copy()#1.图片的灰度,截取处理gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray_img = gray_img[x1:x2, y1:y2]#[540:741, 810:1080],截取轨道画线的区域,对该区域识别轨道img2=gray_img#2.中值滤波gray_img = cv2.medianBlur(gray_img, ksize=3)# cv2.imshow("Dilated Image", gray_img)# cv2.waitKey(0)st=time.time()for i in range(gray_img.shape[0]):for j in range(gray_img.shape[1]-2):ss1 = gray_img[i, j:j + 2].mean()m=abs(gray_img[i][j]-ss1)if m>9:img2[i][j] =255else:img2[i][j] =0img2[:,-3:]=0et = time.time()print("kmeans时间",et-st)# cv2.imshow("img_mean", img2)# cv2.waitKey(0)# 3.腐蚀膨胀消除轨道线外的点st1=time.time()kernel = np.uint8(np.ones((2, 1)))# 膨胀图像.....为了使得轨道线更粗,且补足轨道线缺失的地方dilated = cv2.dilate(img2, kernel)#显示膨胀后的图像# cv2.imshow("Dilated Image", dilated)# cv2.waitKey(0)kernel = np.ones((2, 2), np.uint8)dilated = cv2.erode(dilated, kernel)cv2.imshow("ss",dilated)cv2.waitKey(0)ss=np.argwhere(img2>0)#dilatedcv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\120.jpg",dilated)#聚类算法items = cluster(ss, radius=3)print(len(items))i=0out=[]#获得大于300个坐标的类for item in items:if len(item)>300:out.append(item)print("====>", len(item))for k in item:img[k[0]+x1][k[1]+y1]=colors[i]#[540:743, 810:1035]i+=1# cv2.imshow("ss",img)# cv2.waitKey(0)cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\121.jpg", img)et1 = time.time()print("聚类时间:", et1 - st1)#求聚类的每类每行的中位数median=k_mean(out)#根据中位数画图j=0for item in median:for k in median[item]:#print(k[0],k[1])imgs[k[0]+x1][k[1]+y1] = colors[j] # [540:743, 810:1035]j+=1cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\122.jpg", imgs)et3=time.time()print("中位数时间:", et3 - et1)print(".....................................","\n")#用直线拟合,首先用两个均值得到初始线的斜率及均值坐标,然后不断对远离的坐标点拟合distances=4while distances>0:median=lines(median,distances)distances-=1#画图j = 0for item in median:for k in median[item]:# print(k[0],k[1])img4[k[0] + x1][k[1] + y1] = colors[j] # [540:743, 810:1035]j += 1cv2.imwrite("D:\AI\project\eye_hand_biaoding\\railways\img\\123.jpg", img4)et4=time.time()print("直线拟合消耗时间:",et4-et3)return outif __name__ == '__main__':start=time.time()img_path=r图片路径"img=cv2.imread(img_path)out=mean_img(img,x1=650,x2=741,y1=825,y2=1025)#x1=540,x2=741,y1=810,y2=1030end=time.time()print("time:",end-start)上述的直线拟合没有用最小二乘法,处理后的画图结果如下:


显然,拟合的结果并不好。下面用霍夫曼求直线的方法拟合。
二、霍夫曼圆找直线
相关文章:
9.传统的轨道画线算法()
轨道画线分为以下步骤: 1.读取摄像头图片 2.图片灰度处理,截取轨道区域的图片 3.中值滤波处理,并区域取均值后做期望差的绝对值。本人通过一些轨道图片实验,用这种方法二值化得到的效果比caany算子等方法的效果好 4.二值化后再…...
 : B DS二叉排序树_有效的二叉排序树)
F (1164) : B DS二叉排序树_有效的二叉排序树
Description 给你一个二叉树,判断其是否是一个有效的二叉排序树。 有效的二叉排序树定义如下: 1. 结点的左子树只包含小于当前结点的数。 2. 结点的右子树只包含大于当前结点的数。 3. 所有左子树和右子树自身必须也是二叉排序树。 Input 第一行输…...

结合el-upload修改支持上传图片、视频并预览
结合element plus的el-upload标签,实现上传图片和视频,并支持在线预览和放大 1、html部分 <el-form-item label"活动照片、视频"><el-uploadv-model:file-list"state.photoList":action"state.uploadUrl"accept…...

1.SQL - 概述
1. SQL语句分类 • 数据定义语言:简称DDL(Data Definition Language),用来定义数据库对象:数据库,表,列等。关键字:create,alter,drop等 • 数据操作语言:简称DML(Data …...
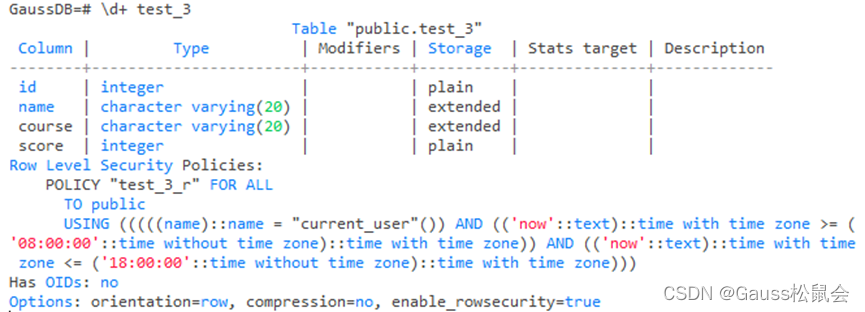
GaussDB数据库表创建行访问控制策略
目录 一、前言 二、GaussDB中的行访问控制 1、CREATE ROW LEVEL SECURITY POLICY语法 2、ALTER ROW LEVEL SECURITY POLICY语法 3、ROW LEVEL SECURITY策略与适配SQL语法关系 三、GaussDB中的行访问控制策略示例 1、实现GaussDB行访问控制的一般步骤 2、行访问控制策略…...

提升设备巡检效率的关键:易点易动设备管理系统的应用
随着互联网技术的发展,智慧设备管理已成为各行各业提升运营效率的重要选择。相比传统的手动巡检方式,采用设备管理系统可以实现物联网技术给企业带来更高效的运营方式。其中,易点易动作为一款成熟的设备管理系统,其广泛应用于提升设备巡检效率这一领域发挥了很好的作用。 采用易…...
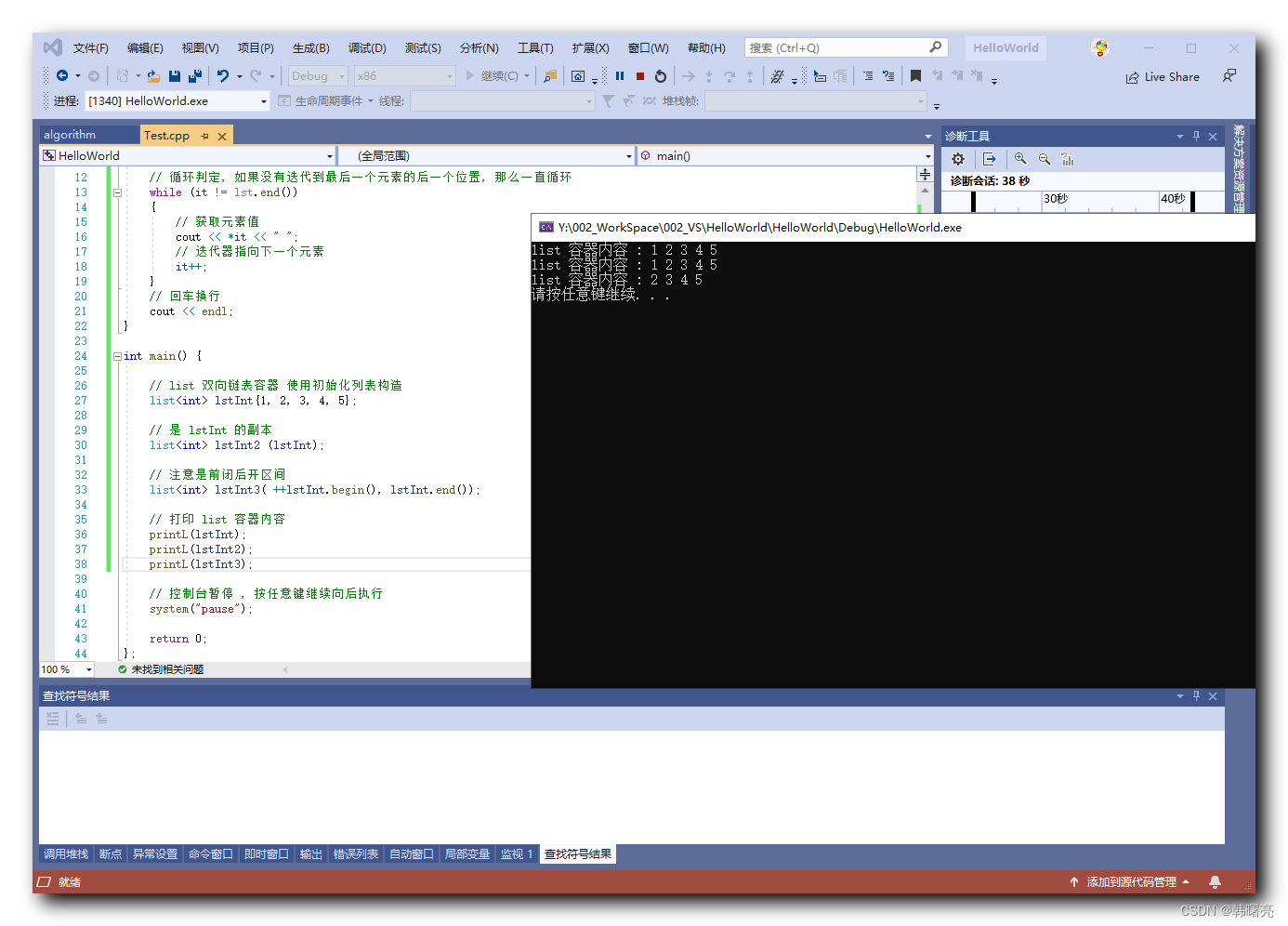
【C++】STL 容器 - list 双向链表容器 ① ( 容器特点 | 容器操作时间复杂度 | 构造函数 )
文章目录 一、 list 双向链表容器简介1、容器特点2、容器操作时间复杂度3、遍历访问5、头文件 二、 list 双向链表容器 构造函数1、默认无参构造函数2、创建包含 n 个相同元素的 list 双向链表3、使用初始化列表构造 list 双向链表4、使用另外一个 list 容器 构造 list 双向链表…...
[C/C++]数据结构 希尔排序
🥦前言: 希尔排序也称 “缩小增量排序”,它也是一种插入类排序的方法,在学习希尔排序之前我们首先了解一下直接插入排序. 一: 🚩直接插入排序 1.1 🌟排序思路 直接插入排序的基本原理是将一条记录插入到已排好的有序表中&#x…...

SQL进阶:子查询
一般情况下,我们都是直接对表进行查询,但有时候,想要的数据可能通过一次select 获取不到,需要嵌套select,这样就形成了子查询。 子查询可以位于查询语句的任意位置,主要的注意点在于用于不同的位置,和不同的关键字一起使用时,需要注意返回的列的数量和行的数量。 位于…...

5、IDEA集成Git
IDEA集成Git 1. 配置Git忽略文件2. 定位Git程序3. 初始化本地库、添加暂存区、提交到本地库4. 切换版本5. 创建分支和切换分支6. 合并分支7. 解决冲突 1. 配置Git忽略文件 问题1:为什么要忽略他们? 与项目的实际功能无关,不参与服务器上部署…...

oracle数据库sqlplus登录卡顿
问题描述 新安装了一套oracle 11.2.0.1 版本的数据库服务器,出现了在服务器本地通过sqlplus / as sysdba登录的时候很快,但是通过监听登录的时候就非常的慢,卡顿,大概需要1分钟多的时间才能登进数据库。 之前安装了好几套oracle …...
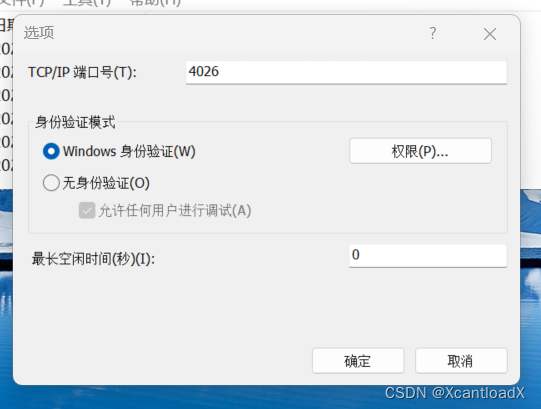
【C#】Visual Studio 2022 远程调试配置教程
在某些特殊的情况下,开发机和调试机可能不是同一台设备,此时就需要远程调试了。 开发机配置 首先需要确保两台机器在同一局域网下。 创建共享文件夹 随便找个地方新建一个文件夹,用来放编译结果。例如我这里是 D:\DebuggingWorkspace\。 …...

LSTM的记忆能力实验
长短期记忆网络(Long Short-Term Memory Network,LSTM)是一种可以有效缓解长程依赖问题的循环神经网络.LSTM 的特点是引入了一个新的内部状态(Internal State) 和门控机制(Gating Mechanism)&am…...

Unity之ShaderGraph如何实现瓶装水效果
前言 有一个场景在做效果时,有一个水瓶放到桌子上的设定,但是模型只做了个水瓶,里面是空的,所以我就想办法,如何做出来瓶中装睡的效果,最好是能跟随瓶子有液体流动的效果。 如下图所示: 水面实现 水面效果 液体颜色设置 因为液体有边缘颜色和内里面颜色,所以要分开…...
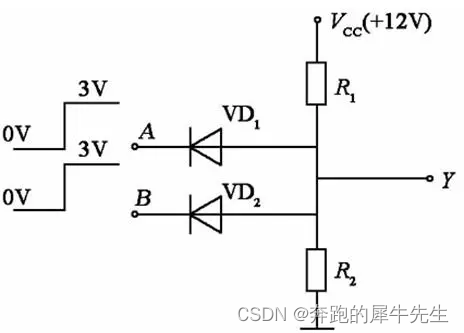
【python与机器学习3】感知机和门电路:与门,或门,非门等
目录 1 电子和程序里的与门,非门,或门,与非门 ,或非门,异或门 1.1 基础电路 1.2 所有的电路情况 1.3 电路的符号 1.4 各种电路对应的实际电路图 2 各种具体的电路 2.1 与门(and gate) 2…...

关键字:extends关键字
在 Java 中,extends 是一个关键字,用于表示继承关系。当一个类使用 extends 关键字时,它表示该类是一个子类,并且继承了父类的属性和方法。 以下是 extends 关键字的解析: 语法: 描述: ChildC…...

KEPServerEX 6 之【外篇-1】PTC-ThingWorx服务端软件安装 Tomcat10本地安装
本文目标: 安装 Java 和 Apache Tomcat ,为ThingWorx安装做基础。 ----------------------------------------------------------------------- 安装重点 --------------------------------------------------------------------- 1. 安装 Java 11 / JDK 11 添加系…...
(Mac上)使用Python进行matplotlib 画图时,中文显示不出来
【问题描述】 ①报错确缺失字体: ②使用matplotlib画图,中文字体显示不出来 【问题思考】 在网上搜了好多,关于使用python进行matplotlib画图字体显示不出来的,但是我试用了下,对我来说都没有。有些仅使用于windows系…...

万能刷题小程序源码系统:功能强大+试题管理+题库分类+用户列表 附带完整的搭建教程
随着互联网技术的不断进步,线上学习已成为越来越多人的选择。刷题作为提高学习效果的重要方式,一直受到广大学生的喜爱。然而,市面上的刷题软件虽然繁多,但功能各异,质量参差不齐,使得很多用户在选择时感到…...
)
5.2 显示窗口的内容(二)
三,显示器几何形状管理 只有显示管理器被允许更改显示器的几何形状。窗口管理器也是显示管理器。 3.1 当显示器显示其自身内容时 当显示器显示其自身内容时,适用以下属性: 显示属性描述SCREEN_PROPERTY_PROTECTION_ENABLE表示显示目标窗口是否需要内容保护。只要显示器上…...

[SSD]SSD主控
SSD系统架构SSD系统由一块CPU主控,可以是ARM或者RISC-v;整个主控芯片分为三个部分,分别是主机接口控制器,缓存控制器和闪存控制器,它可以分为前端和后端,前端就是主机接口控制器和主机之间的通信࿰…...

GitHub Desktop汉化神器:3分钟让英文界面变中文
GitHub Desktop汉化神器:3分钟让英文界面变中文 【免费下载链接】GitHubDesktop2Chinese GithubDesktop语言本地化(汉化)工具 【GitHub桌面客户端中文汉化】 项目地址: https://gitcode.com/gh_mirrors/gi/GitHubDesktop2Chinese 还在为GitHub Desktop的英文…...

3分钟快速上手vJoy:如何为Windows创建专业级虚拟游戏手柄
3分钟快速上手vJoy:如何为Windows创建专业级虚拟游戏手柄 【免费下载链接】vJoy Virtual Joystick 项目地址: https://gitcode.com/gh_mirrors/vj/vJoy 您是否曾经因为缺少游戏手柄而无法畅玩那些只支持手柄操作的游戏?或者需要为特殊软件设计自定…...

Unitree GO2四足机器人ROS2开发终极指南:从零到自主导航的完整教程
Unitree GO2四足机器人ROS2开发终极指南:从零到自主导航的完整教程 【免费下载链接】go2_ros2_sdk Unofficial ROS2 SDK support for Unitree GO2 AIR/PRO/EDU 项目地址: https://gitcode.com/gh_mirrors/go/go2_ros2_sdk 你是否曾经梦想过让四足机器人像真实…...

专业联发科设备bootloader解锁与安全绕过实战指南
专业联发科设备bootloader解锁与安全绕过实战指南 【免费下载链接】mtkclient-gui GUI tool for unlocking bootloader and bypassing authorization on Mediatek devices (Not maintained anymore) 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient-gui mtkclie…...
)
保姆级教程:在Ubuntu 18.04 + ROS Melodic上搞定Intel RealSense D415深度相机驱动(附固件升级避坑指南)
从零搭建ROS Melodic环境:Intel RealSense D415深度相机全流程配置指南 第一次将Intel RealSense D415深度相机连接到Ubuntu 18.04系统时,我遇到了驱动不兼容、固件版本冲突、USB连接不稳定等一系列问题。经过多次尝试和调试,终于总结出一套…...

Unity 2019格斗游戏开发:帧同步、输入缓冲与Hitbox/Hurtbox实现
1. 为什么2019版Unity仍是横板格斗开发的“黄金锚点”我带过三届游戏开发训练营,每次开课前都会问学员:“你最想用哪个版本做格斗游戏?”——超过七成的人脱口而出“最新版”。但当我把他们拉进一个用Unity 2019.4.40f1跑通的《街霸》风格连招…...

微信聊天记录终极备份指南:如何永久保存你的珍贵回忆
微信聊天记录终极备份指南:如何永久保存你的珍贵回忆 【免费下载链接】WechatBakTool 基于C#的微信PC版聊天记录备份工具,提供图形界面,解密微信数据库并导出聊天记录。 项目地址: https://gitcode.com/gh_mirrors/we/WechatBakTool 你…...
)
终极指南:如何在Mac上免费创建Windows启动盘(3步教程)
终极指南:如何在Mac上免费创建Windows启动盘(3步教程) 【免费下载链接】windiskwriter 🖥 Windows Bootable USB creator for macOS. 🛠 Patches Windows 11 to bypass TPM and Secure Boot requirements. ὇…...

如何使用 Graphviz 在 5 分钟内创建专业流程图:Python 数据可视化终极指南
如何使用 Graphviz 在 5 分钟内创建专业流程图:Python 数据可视化终极指南 【免费下载链接】graphviz Simple Python interface for Graphviz 项目地址: https://gitcode.com/gh_mirrors/gr/graphviz 想要快速创建专业流程图吗?Graphviz 是一个强…...