20231227在Firefly的AIO-3399J开发板的Android11的挖掘机的DTS配置单后摄像头ov13850
20231227在Firefly的AIO-3399J开发板的Android11的挖掘机的DTS配置单后摄像头ov13850
2023/12/27 18:40
1、简略步骤:
rootroot@rootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ tar jxvf Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ mv Android11.0 61Android11.0
rootroot@rootroot-X99-Turbo:~/3TB$ cd 61Android11.0
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ cd u-boot
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/u-boot$ ./make.sh rk3399
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/u-boot$ cd ..
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ cd kernel/
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/kernel$ make ARCH=arm64 rockchip_defconfig android-11.config -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0/kernel$ make ARCH=arm64 BOOT_IMG=../rockdev/Image-rk3399_Android11/boot.img rk3399-sapphire-excavator-edp-avb.img -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ source build/envsetup.sh
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ lunch
42. rk3399_Android11-userdebug
Which would you like? [aosp_arm-eng] 42
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ make -j36
rootroot@rootroot-X99-Turbo:~/3TB/61Android11.0$ ./build.sh -u
2、
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip-excavator\rk3399-sapphire-excavator-edp.dtsi
/*
* Copyright (c) 2018 Fuzhou Rockchip Electronics Co., Ltd
*
* This file is dual-licensed: you can use it either under the terms
* of the GPL or the X11 license, at your option. Note that this dual
* licensing only applies to this file, and not this project as a
* whole.
*
* a) This file is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of the
* License, or (at your option) any later version.
*
* This file is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* Or, alternatively,
*
* b) Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use,
* copy, modify, merge, publish, distribute, sublicense, and/or
* sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following
* conditions:
*
* The above copyright notice and this permission notice shall be
* included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
* HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*/
/dts-v1/;
#include "rk3399-excavator-sapphire.dtsi"
#include "rk3399-android.dtsi"
#include "rk3399-vop-clk-set.dtsi"
/ {
vcc_lcd: vcc-lcd {
compatible = "regulator-fixed";
regulator-name = "vcc_lcd";
gpio = <&gpio4 30 GPIO_ACTIVE_HIGH>;
startup-delay-us = <20000>;
enable-active-high;
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-boot-on;
vin-supply = <&vcc5v0_sys>;
};
panel: panel {
compatible = "simple-panel";
backlight = <&backlight>;
power-supply = <&vcc_lcd>;
enable-gpios = <&gpio1 13 GPIO_ACTIVE_HIGH>;
prepare-delay-ms = <20>;
enable-delay-ms = <20>;
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <200000000>;
hactive = <1536>;
vactive = <2048>;
hfront-porch = <12>;
hsync-len = <16>;
hback-porch = <48>;
vfront-porch = <8>;
vsync-len = <4>;
vback-porch = <8>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
ports {
panel_in: endpoint {
remote-endpoint = <&edp_out>;
};
};
};
test-power {
status = "okay";
};
hdmiin_sound: hdmiin-sound {
compatible = "rockchip,rockchip-rt5651-sound";
rockchip,cpu = <&i2s0>;
rockchip,codec = <&rt5651 &rt5651>;
status = "okay";
};
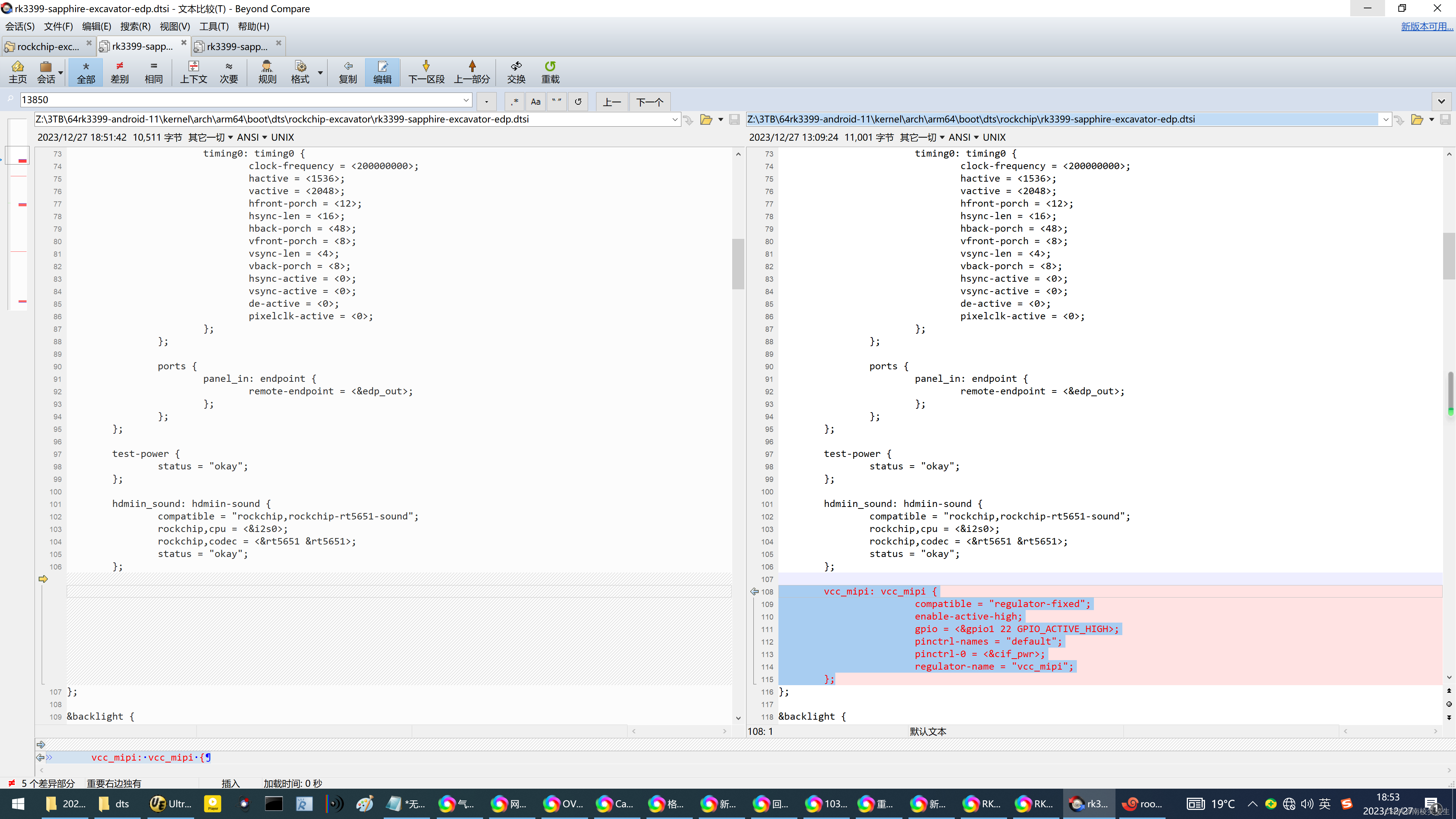
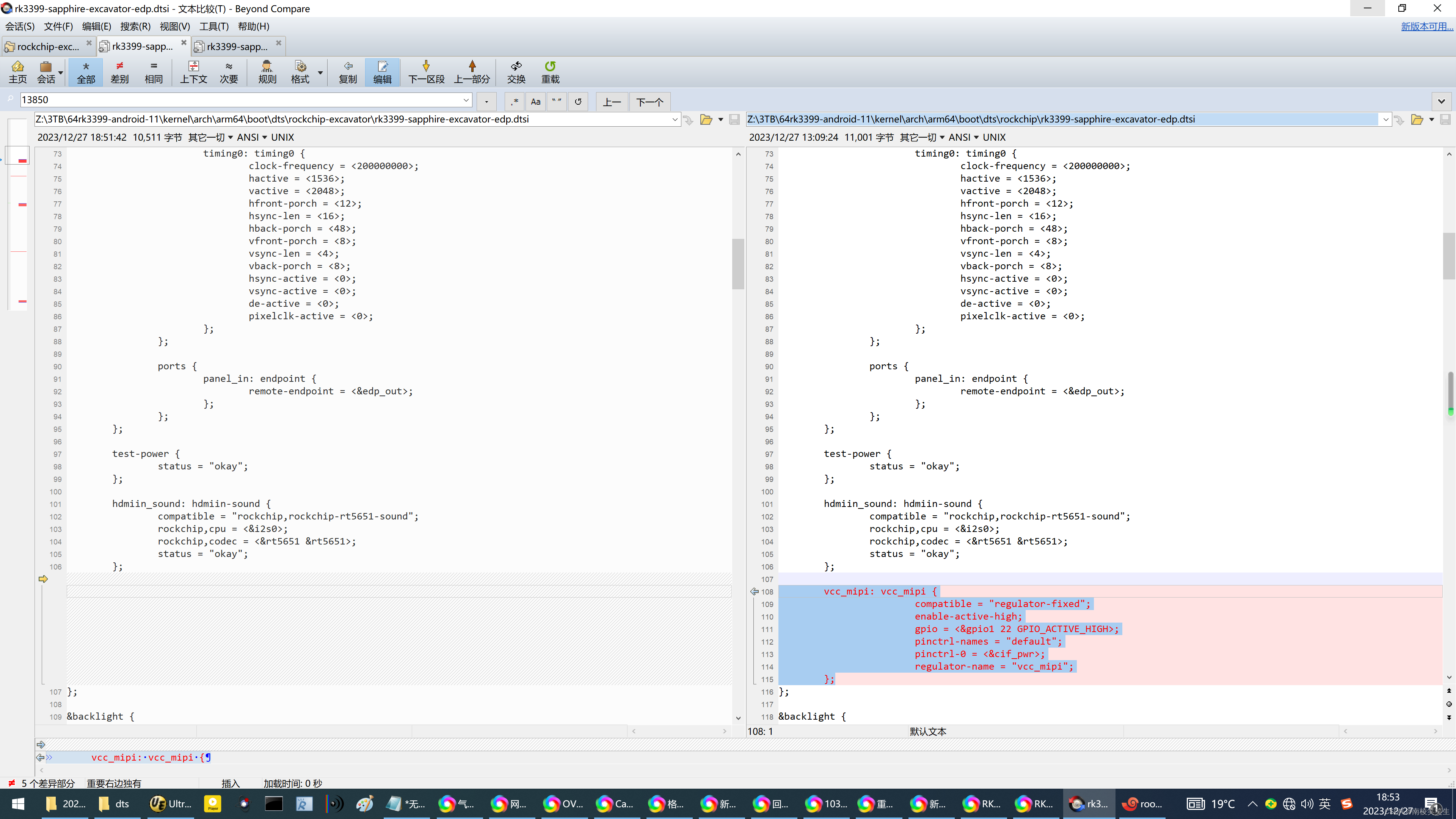
vcc_mipi: vcc_mipi {
compatible = "regulator-fixed";
enable-active-high;
gpio = <&gpio1 22 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&cif_pwr>;
regulator-name = "vcc_mipi";
};
};
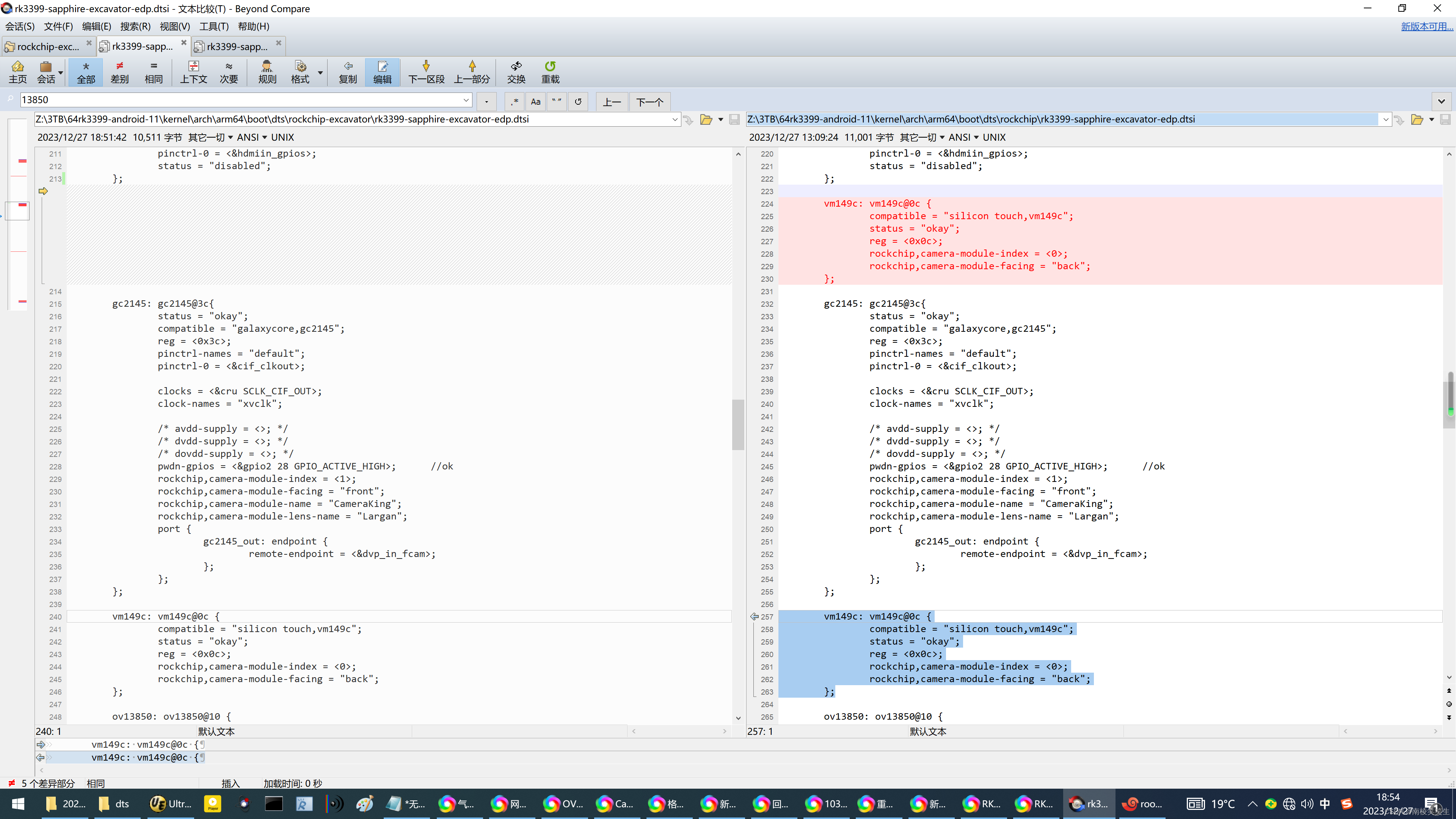
vm149c重复了,直接拿掉!
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip-excavator\rk3399-sapphire-excavator-edp.dtsi
&i2c1 {
status = "okay";
gsl3673: gsl3673@40 {
compatible = "GSL,GSL3673";
reg = <0x40>;
screen_max_x = <1536>;
screen_max_y = <2048>;
irq_gpio_number = <&gpio1 20 IRQ_TYPE_LEVEL_LOW>;
rst_gpio_number = <&gpio4 22 GPIO_ACTIVE_HIGH>;
};
sgm3784: sgm3784@30 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "sgmicro,gsm3784";
reg = <0x30>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
enable-gpio = <&gpio2 RK_PB4 GPIO_ACTIVE_HIGH>;
strobe-gpio = <&gpio1 RK_PA3 GPIO_ACTIVE_HIGH>;
status = "okay";
sgm3784_led0: led@0 {
reg = <0x0>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
sgm3784_led1: led@1 {
reg = <0x1>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
};
tc358749x: tc358749x@0f {
compatible = "toshiba,tc358749x";
reg = <0x0f>;
power-gpios = <&gpio2 6 GPIO_ACTIVE_HIGH>;
power18-gpios = <&gpio2 9 GPIO_ACTIVE_HIGH>;
power33-gpios = <&gpio2 5 GPIO_ACTIVE_HIGH>;
csi-ctl-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>;
stanby-gpios = <&gpio2 8 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 7 GPIO_ACTIVE_HIGH>;
int-gpios = <&gpio2 12 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&hdmiin_gpios>;
status = "disabled";
};
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
gc2145: gc2145@3c{
status = "okay";
compatible = "galaxycore,gc2145";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clkout>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>; //ok
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CameraKing";
rockchip,camera-module-lens-name = "Largan";
port {
gc2145_out: endpoint {
remote-endpoint = <&dvp_in_fcam>;
};
};
};
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13850: ov13850@10 {
compatible = "ovti,ov13850";
status = "okay";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
/* reset-gpios = <>; */
reset-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>; // conflict with csi-ctl-gpios
pwdn-gpios = <&gpio1 4 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c>;
flash-leds = <&sgm3784_led0 &sgm3784_led1>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
//remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
ov4689: ov4689@36 {
compatible = "ovti,ov4689";
status = "disabled";
reg = <0x36>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
/* reset-gpios = <>; */
pwdn-gpios = <&gpio4 29 GPIO_ACTIVE_HIGH>; // conflict with backlight
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "JSD3425-C1";
rockchip,camera-module-lens-name = "JSD3425-C1";
port {
ucam_out1: endpoint {
//remote-endpoint = <&mipi_in_ucam0>;
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip-excavator\rk3399-sapphire-excavator-edp.dtsi
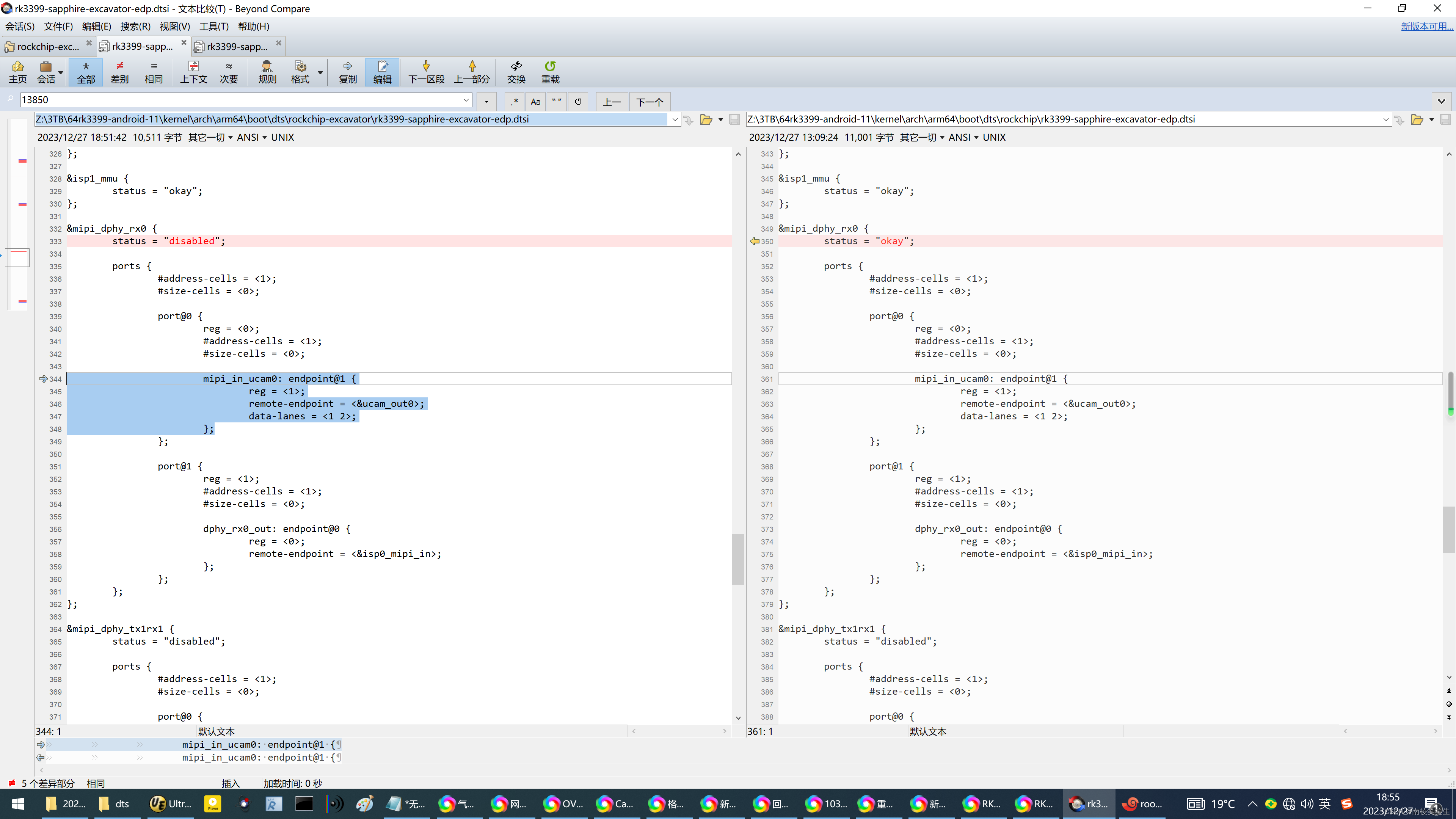
&mipi_dphy_rx0 {
status = "disabled";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};

Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip-excavator\rk3399-sapphire-excavator-edp.dtsi
&rt5651_sound {
status = "okay";
};
&pinctrl {
cam0 {
cif_pwr: cif-pwr {
rockchip,pins = <1 22 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
lcd-panel {
lcd_panel_reset: lcd-panel-reset {
rockchip,pins = <4 RK_PD6 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
hdmiin {
hdmiin_gpios: hdmiin_gpios {
rockchip,pins =
<2 RK_PA5 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA6 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB1 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip-excavator\rk3399-sapphire-excavator-edp-avb.dts
&i2c1 {
status = "okay";
/delete-node/ tc358749x@0f;
tc35874x: tc35874x@0f {
status = "disabled";
reg = <0x0f>;
compatible = "toshiba,tc358749";
clocks = <&ext_cam_clk>;
clock-names = "refclk";
reset-gpios = <&gpio2 7 GPIO_ACTIVE_LOW>;
/* interrupt-parent = <&gpio2>; */
/* interrupts = <12 IRQ_TYPE_LEVEL_HIGH>; */
pinctrl-names = "default";
pinctrl-0 = <&tc35874x_gpios>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "TC358749XBG";
rockchip,camera-module-lens-name = "NC";
port {
hdmiin_out0: endpoint {
remote-endpoint = <&hdmi_to_mipi_in>;
data-lanes = <1 2 3 4>;
clock-noncontinuous;
link-frequencies =
/bits/ 64 <297000000>;
};
};
};
ov13850: ov13850@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 1 GPIO_ACTIVE_HIGH>;
};
};

参考资料:
http://www.friendlyelec.com.cn/agent.asp
http://www.friendlyelec.com.cn/
https://download.friendlyelec.com/NanoPC-T4
https://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4/zh#.E4.B8.8B.E8.BD.BDAndroid10.E6.BA.90.E4.BB.A3.E7.A0.81
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.37562e8dcotDm6&id=570312633249&_u=7ju3ku004a
友善NanoPC-T4瑞芯微RK3399开发板ROS双摄4K播放开源AI智能安卓10
WiKi维基教程(固件介绍,使用说明,操作步骤等)
http://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4
系统固件下载
https://dl.friendlyelec.com/nanopct4
原理图(pdf格式)
http://wiki.friendlyelec.com/wiki/images/e/e0/NanoPC-T4-1902-Schematic.pdf
尺寸图(dxf格式)
http://wiki.friendlyelec.com/wiki/images/b/bc/NanoPC-T4_1802_Drawing%28dxf%29.zip
http://www.friendlyelec.com.cn/nanopi-m4.asp
NanoPi M4 | NanoPi M4V2
https://wiki.friendlyelec.com/wiki/index.php/NanoPi_M4/zh
15.3 编译Android10源代码
15.3.1 下载Android10源代码
有以下两种途径获取 Android10 的源代码,都需要联网:
使用网盘里的git repo压缩包
网盘下载地址: 点击进入
https://download.friendlyelec.com/NanoPiM4
https://pan.baidu.com/share/init?surl=oBLn9H31hILJKEPQXgrUog
提取码:yn6r



相关文章:
20231227在Firefly的AIO-3399J开发板的Android11的挖掘机的DTS配置单后摄像头ov13850
20231227在Firefly的AIO-3399J开发板的Android11的挖掘机的DTS配置单后摄像头ov13850 2023/12/27 18:40 1、简略步骤: rootrootrootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2 rootrootrootroot-X99-Turbo:~/3TB$ tar jxvf Androi…...
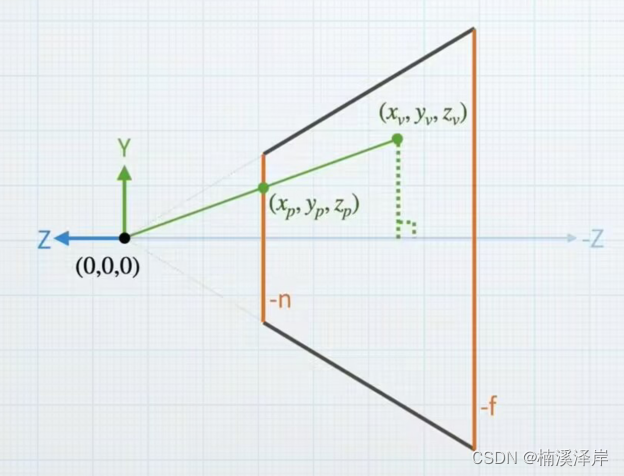
Unity中Shader裁剪空间推导(透视相机到裁剪空间的转化矩阵)
文章目录 前言一、简单看一下 观察空间—>裁剪空间—>屏幕空间 的转化1、观察空间(右手坐标系、透视相机)2、裁剪空间(左手坐标系、且转化为了齐次坐标)3、屏幕空间(把裁剪坐标归一化设置)4、从观察空…...

企业签名分发对移动应用开发者有什么影响
企业签名分发是移动应用开发者在应用程序发布前测试、内部分发和特定的受众群体分发等方面比较常用的一种工具。那对于应用商城分发有啥区别,下面简单的探讨一下。 独立分发能力 通过企业签名分发开发者可以自己决定应用程序的发布时间和方式,不用受应用…...
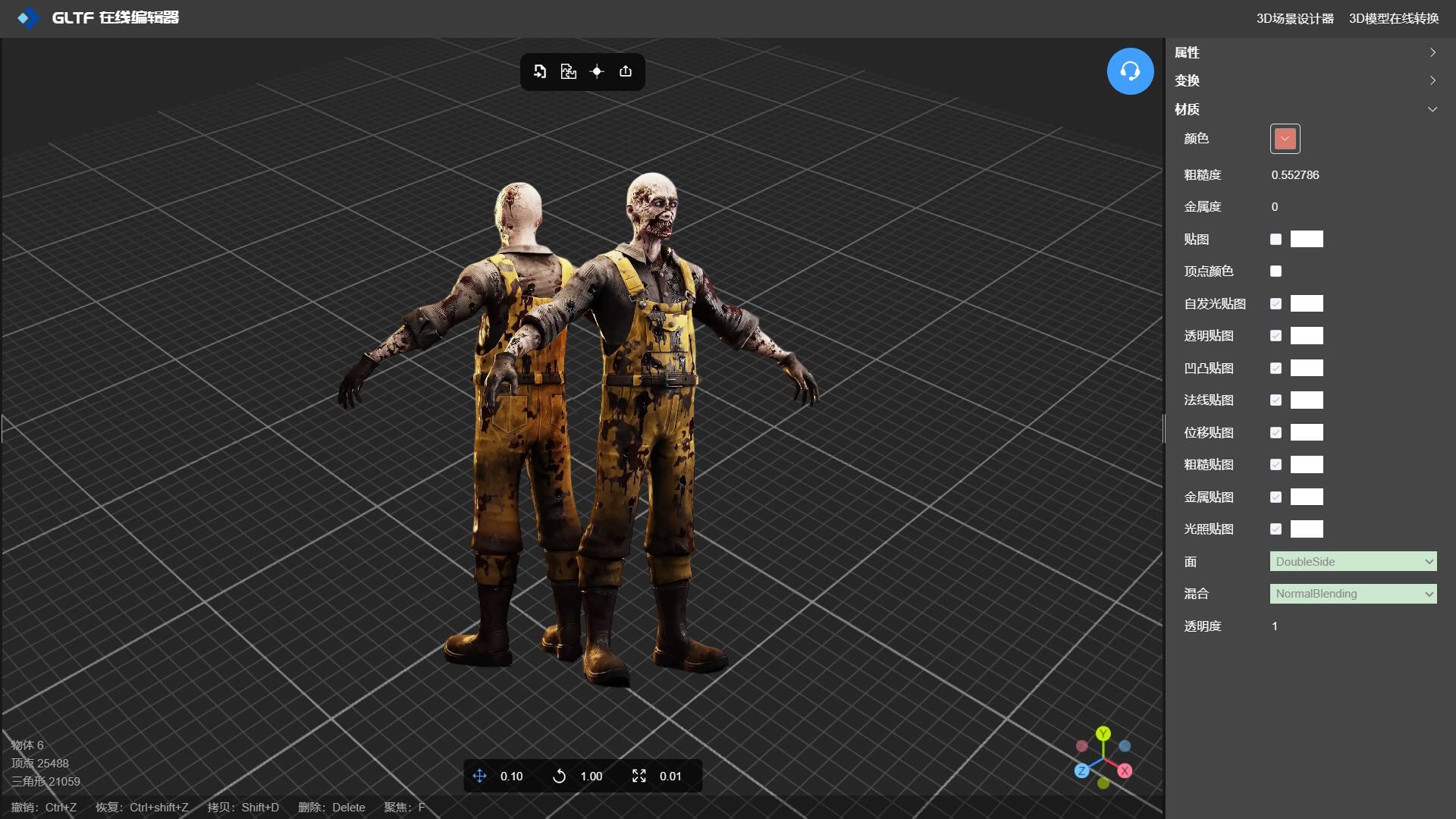
3D游戏角色建模纹理贴图处理
在线工具推荐: 3D数字孪生场景编辑器 - GLTF/GLB材质纹理编辑器 - 3D模型在线转换 - Three.js AI自动纹理开发包 - YOLO 虚幻合成数据生成器 - 三维模型预览图生成器 - 3D模型语义搜索引擎 在本文中,我们将介绍 3D 纹理的基础知识,并讨…...

【C++ 单例模式】
正确的析构 静态实例和回收类 SingletonMode.cpp #include <iostream> #include <pthread.h>class Singleton {private:Singleton(){std::cout << "构造" << std::endl;};~Singleton(){std::cout << "析构" << std::…...

React16源码: ConcurrentMode的使用及源码实现
ConcurrentMode 1 ) 概述 ConcurrentMode 是 React 16 出来的一个最令人振奋的功能在2018年年初是 Async Mode,在发布了16.6之后,名字进行了更新然后改成了 ConcurrentMode,中间的API有一个过渡的版本,后续会提到它其实是 React…...
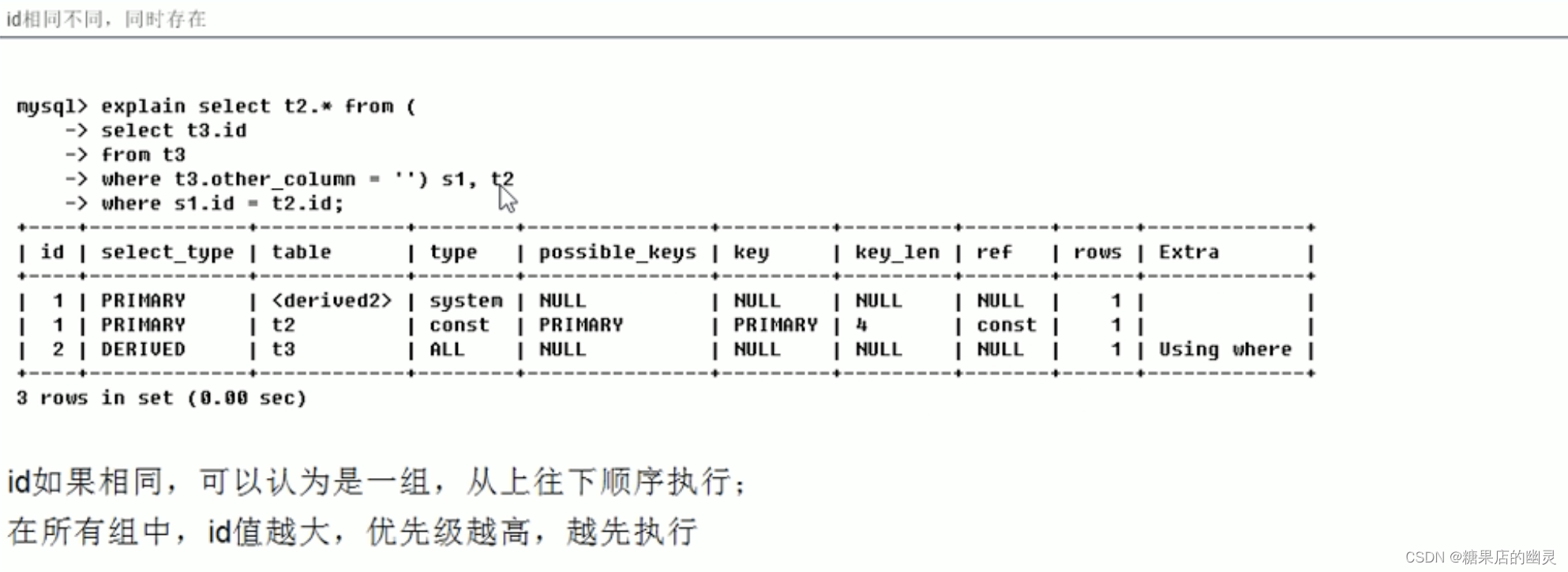
SQL性能优化-索引
1.性能下降sql慢执行时间长等待时间长常见原因 1)索引失效 索引分为单索、复合索引。 四种创建索引方式 create index index_name on user (name); create index index_name_2 on user(id,name,email); 2)查询语句较烂 3)关联查询太多join&a…...

Ubuntu本地快速搭建web小游戏网站,公网用户远程访问
🔥博客主页: 小羊失眠啦. 🎥系列专栏:《C语言》 《数据结构》 《Linux》《Cpolar》 ❤️感谢大家点赞👍收藏⭐评论✍️ 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,…...
easyrecovery 2024最新免费密钥分享 实用数据恢复软件分享
在日常使用电脑时,我们经常会遇到误删文件的情况,若文件还未被彻底删除,我们还可以通过电脑中的回收站将其恢复,但若是回收站都被清空的话,想要恢复文件就变得比较困难了,而EasyRecovery可以很好的帮助我们…...

2.4信道复用技术
目录 2.4信道复用技术2.4.1频分复用、时分复用和统计时分复用频分复用FDM(Frequency Division Multiplexing)时分复用TDM(Time Division Multiplexing)统计时分复用STDM(Statistic TDM) 2.4.2波分复用2.4.3…...
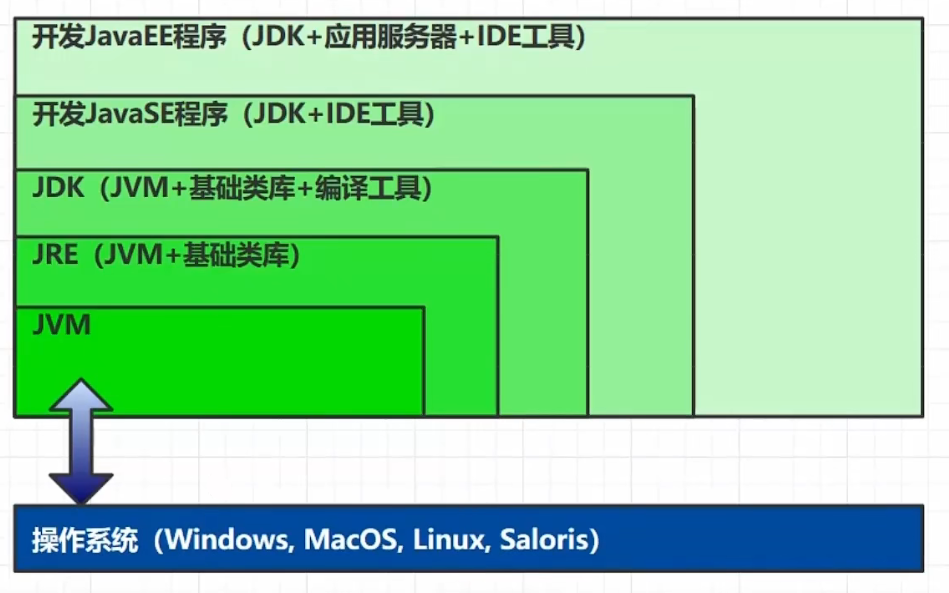
JVM篇:JVM的简介
JVM简介 JVM全称为Java Virtual Machine,翻译过来就是java虚拟机,Java程序(Java二进制字节码)的运行环境 JVM的优点: Java最大的一个优点是,一次编写,到处运行。之所以能够实现这个功能就是依…...
uniapp 输入手机号并且正则校验
1.<input input“onInput” :value“phoneNum” type“number” maxlength“11”/> 3. method里面写 onInput(e){ this.phoneNum e.detail.value }, 4.调用接口时候校验正则 if (!/^1[3456789]\d{9}$/.test(this.phoneNum)) {uni.showToast({title: 请输入正确的手机号…...

经典目标检测YOLO系列(一)复现YOLOV1(3)正样本的匹配及损失函数的实现
经典目标检测YOLO系列(一)复现YOLOV1(3)正样本的匹配及损失函数的实现 之前,我们依据《YOLO目标检测》(ISBN:9787115627094)一书,提出了新的YOLOV1架构,并解决前向推理过程中的两个问题,继续按照此书进行YOLOV1的复现。 经典目标…...

kbdnecat.DLL文件缺失,软件或游戏无法启动运营,快速修复方法
“kbdnecat.DLL文件是什么?为什么一起动游戏或软件,Windows就报错“kbdnecat.DLL文件缺失,软件无法启动””,应该怎么修复呢? 首先,先来了解“kbdnecat.DLL文件”是什么? kbdnecat.DLL是一个动…...
Dockerfile与DockerCompose
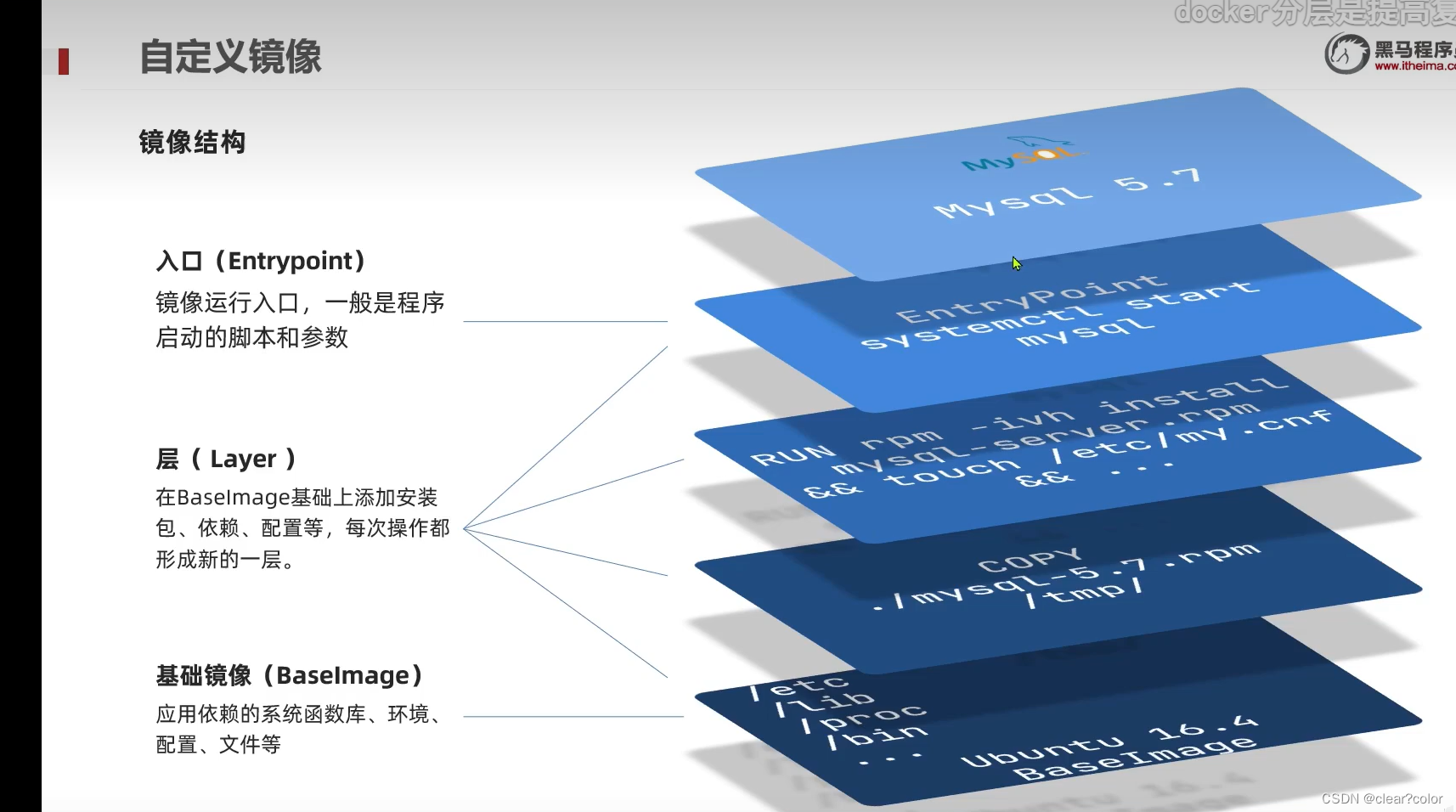
Docker的Image结构是怎样的? 镜像是将应用程序 及其需要的 系统函数库、环境、配置、依赖 打包而成。 镜像结构 入口( Entrypoint ) 镜像运行入口,一般是程序启动的脚本和参数 层( Layer ) 在BaseImage基…...
【CFP-专栏2】计算机类SCI优质期刊汇总(含IEEE/Top)
一、计算机区块链类SCI-IEEE 【期刊概况】IF:4.0-5.0, JCR2区,中科院2区; 【大类学科】计算机科学; 【检索情况】SCI在检; 【录用周期】3-5个月左右录用; 【截稿时间】12.31截稿; 【接收领域】区块链…...

Stable Diffusion 本地部署详细教程
目录 一、前言二、系统和硬件要求三、安装前说明四、安装步骤5、升级pip(这是管理python环境软件工具),并把资源库换成国内地址为清华镜像。一、前言 虽然MJ和SD都可以生成图像,但是为什么我们要考虑使用本地SD部署呢?原因其实很简单:首先,本地部署的使用成本更低,且更加…...
【超图】SuperMap iClient3D for WebGL/WebGPU —— 坐标系位置 —— Cartesian2
作者:taco 说到关于地理必然逃不开位置的关系。借用百度百科的内容来说地理学(geography),是研究地球表层空间地理要素或者地理综合体空间分布规律、时间演变过程和区域特征的一门学科。所以位置&坐标系必然逃不掉了。那么在S…...
【Matlab】LSTM长短期记忆神经网络时序预测算法(附代码)
资源下载: https://download.csdn.net/download/vvoennvv/88688439 一,概述 LSTM(Long Short-Term Memory)是一种常用的循环神经网络(Recurrent Neural Network,RNN)结构,由于其对于…...

2.2 设计FMEA步骤二:结构分析
2.2.1 目的 设计结构分析的目的是将设计识别和分解为系统、子系统、组件和零件,以便进行技术风险分析。其主要目标包括: 可视化分析范围结构化表示:方块图、边界图、数字模型、实体零件识别设计接口、交互作用和间隙促进顾客和供应商工程团队之间的协作(接口责任)为功能分…...

为什么你的民族志写作总卡在“分析乏力”?NotebookLM三步穿透文本深层文化逻辑
更多请点击: https://intelliparadigm.com 第一章:为什么你的民族志写作总卡在“分析乏力”?NotebookLM三步穿透文本深层文化逻辑 民族志写作常陷入“描述丰富、解释单薄”的困境——田野笔记堆叠如山,却难以提炼出文化实践背后的…...

将Hermes Agent工具连接到Taotoken的配置要点详解
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 将Hermes Agent工具连接到Taotoken的配置要点详解 Hermes Agent 是一款支持自定义模型提供方的智能体开发工具。通过将其后端连接到…...

React Native Navigation终极指南:构建原生移动应用导航的完整解决方案 [特殊字符]
React Native Navigation终极指南:构建原生移动应用导航的完整解决方案 🚀 【免费下载链接】react-native-navigation A complete native navigation solution for React Native 项目地址: https://gitcode.com/gh_mirrors/re/react-native-navigation…...

终极指南:如何在Jetson/Raspberry Pi上快速部署CLIP-as-service边缘AI搜索服务 [特殊字符]
终极指南:如何在Jetson/Raspberry Pi上快速部署CLIP-as-service边缘AI搜索服务 🚀 【免费下载链接】clip-as-service 🏄 Scalable embedding, reasoning, ranking for images and sentences with CLIP 项目地址: https://gitcode.com/gh_mi…...

终极营销自动化工作流设计:工程师如何构建高效营销流程
终极营销自动化工作流设计:工程师如何构建高效营销流程 【免费下载链接】Marketing-for-Engineers A curated collection of marketing articles & tools to grow your product. 项目地址: https://gitcode.com/gh_mirrors/ma/Marketing-for-Engineers …...

终极Cybersources渗透测试工具大全:从Web应用到网络安全的全面覆盖指南
终极Cybersources渗透测试工具大全:从Web应用到网络安全的全面覆盖指南 【免费下载链接】cybersources A curated list of cybersecurity tools and resources. 项目地址: https://gitcode.com/gh_mirrors/cy/cybersources Cybersources是一个精心策划的网络…...

硬件原型开发实战:从面包板到洞洞板的完整迁移指南
1. 项目概述:从概念到实物的必经之路在电子设计的漫长旅程中,从一张画满符号的电路图,到一台能稳定运行、看得见摸得着的设备,中间横亘着一道看似简单、实则至关重要的鸿沟——原型制作。这道鸿沟,就是“面包板”和“洞…...

CircuitPython开发实战:从环境搭建到内存优化与硬件选型
1. CircuitPython开发环境搭建与核心概念 如果你是从Arduino或者传统的嵌入式C开发转向微控制器编程,第一次接触CircuitPython的感觉,就像是突然有人给你递了一把万能钥匙。过去,点个灯、读个传感器,你得跟寄存器、数据手册、还有…...

小微团队如何利用 Taotoken 统一管理多个 AI 模型密钥与用量
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 小微团队如何利用 Taotoken 统一管理多个 AI 模型密钥与用量 对于小型开发或产品团队而言,在项目开发中集成多个大语言…...

第15章:C++ 日志监控告警
第15章:C++ 日志监控告警 本章定位:第四卷《实战卷》第五篇"生产环境"第 16 章。 一个 C++ 服务上线后能不能"看见"它,能不能"听见"它喊救命,决定了你深夜会不会被叫起来还能在 30 分钟内修好。 目录 01.可观测性三件套 1.1 logs / metrics …...