RK3568驱动指南|第九篇 设备模型-第92章 引用计数器实验
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工智能应用。RK3568 支持安卓 11 和 linux 系统,主要面向物联网网关、NVR 存储、工控平板、工业检测、工控盒、卡拉 OK、云终端、车载中控等行业。
【公众号】迅为电子
【粉丝群】824412014(加群获取驱动文档+例程)
【视频观看】嵌入式学习之Linux驱动(第九期_中断_全新升级)_基于RK3568
【购买链接】迅为RK3568开发板瑞芯微Linux安卓鸿蒙ARM核心板人工智能AI主板
第92章 引用计数器实验
92.1实验程序的编写
92.1.1 驱动程序编写
本实验对应的网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\68_kref\module。
我们编写驱动代码,这段代码用于定义并初始化两个自定义内核对象 mykobject01 和 mykobject02,并将它们添加到一个自定义内核对象集合 mykset 中。这些自定义内核对象可以用于在Linux内核中表示和管理特定的功能或资源。代码中的注释对各个部分进行了解释,帮助理解代码的功能和目的。编写完成的kref.c代码如下所示:
#include <linux/module.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/configfs.h>
#include <linux/kernel.h>
#include <linux/kobject.h>// 定义了三个kobject指针变量:mykobject01、mykobject02、mykobject03
struct kobject *mykobject01;
struct kobject *mykobject02;
struct kobject *mykobject03;// 定义了一个kobj_type结构体变量mytype,用于描述kobject的类型。
struct kobj_type mytype;
// 模块的初始化函数
static int mykobj_init(void)
{int ret;// 创建kobject的第一种方法// 创建并添加了名为"mykobject01"的kobject对象,父kobject为NULLmykobject01 = kobject_create_and_add("mykobject01", NULL);printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);// 创建并添加了名为"mykobject02"的kobject对象,父kobject为mykobject01。mykobject02 = kobject_create_and_add("mykobject02", mykobject01);printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);printk("mykobject02 kref is %d\n", mykobject02->kref.refcount.refs.counter);// 创建kobject的第二种方法// 1 使用kzalloc函数分配了一个kobject对象的内存mykobject03 = kzalloc(sizeof(struct kobject), GFP_KERNEL);// 2 初始化并添加到内核中,名为"mykobject03"。ret = kobject_init_and_add(mykobject03, &mytype, NULL, "%s", "mykobject03");printk("mykobject03 kref is %d\n", mykobject03->kref.refcount.refs.counter);return 0;
}// 模块退出函数
static void mykobj_exit(void)
{printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);printk("mykobject02 kref is %d\n", mykobject02->kref.refcount.refs.counter);printk("mykobject03 kref is %d\n", mykobject03->kref.refcount.refs.counter);// 释放了之前创建的kobject对象kobject_put(mykobject01);printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);printk("mykobject02 kref is %d\n", mykobject02->kref.refcount.refs.counter);printk("mykobject03 kref is %d\n", mykobject03->kref.refcount.refs.counter);kobject_put(mykobject02);printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);printk("mykobject02 kref is %d\n", mykobject02->kref.refcount.refs.counter);printk("mykobject03 kref is %d\n", mykobject03->kref.refcount.refs.counter);kobject_put(mykobject03);printk("mykobject01 kref is %d\n", mykobject01->kref.refcount.refs.counter);printk("mykobject02 kref is %d\n", mykobject02->kref.refcount.refs.counter);printk("mykobject03 kref is %d\n", mykobject03->kref.refcount.refs.counter);
}module_init(mykobj_init); // 指定模块的初始化函数
module_exit(mykobj_exit); // 指定模块的退出函数MODULE_LICENSE("GPL"); // 模块使用的许可证
MODULE_AUTHOR("topeet"); // 模块的作者92.2 运行测试
92.2.1 编译驱动程序
在上一小节中的kref.c代码同一目录下创建 Makefile 文件,Makefile 文件内容如下所示:
export ARCH=arm64#设置平台架构
export CROSS_COMPILE=aarch64-linux-gnu-#交叉编译器前缀
obj-m += kref.o #此处要和你的驱动源文件同名
KDIR :=/home/topeet/Linux/linux_sdk/kernel #这里是你的内核目录
PWD ?= $(shell pwd)
all:make -C $(KDIR) M=$(PWD) modules #make操作
clean:make -C $(KDIR) M=$(PWD) clean #make clean操作对于Makefile的内容注释已在上图添加,保存退出之后,来到存放kref.c和Makefile文件目录下,如下图(图92-1)所示:

图 92-1
然后使用命令“make”进行驱动的编译,编译完成如下图(图92-2)所示:
图 92-2
编译完生成kref.ko目标文件,如下图(图92-3)所示:

图 92-3
至此驱动模块就编译成功了,接下来进行测试。
92.2.2 运行测试
开发板启动之后,使用以下命令进行驱动模块的加载,如下图(图92-4)所示:
insmod kref.ko
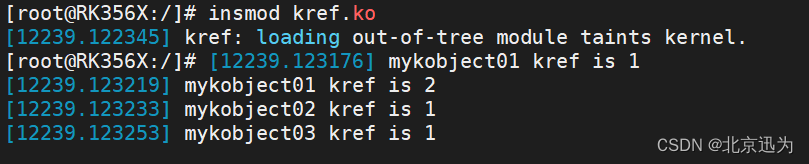
图92-4
如上图所示,驱动加载之后,第一条打印为“mykobject01 kref is 1”,因为创建了mykobject01,所以引用计数器的值为1,如下图所示的I。第二条打印为:“mykobject01 kref is 2”,因为在mykobject01目录下创建了子目录mykobject02,所以mykobject01的计数器值为2,mykobject02的计数器值为1,如下图所示的II。

图92-5
现在我们拓展学习一下,如上图III所示,如果在objectA下面创建俩个object,objectA的计数器值为3。如上图所示IV,如果在objectA下面创建俩个object,那么objectA的计数器值为3,在objectB下创建object,那么objectB的计数器值为2,objectC的计数器值为1。
最后可以使用以下命令进行驱动的卸载,如下图(图21-11)所示:
rmmod kref

图92-6
如上图所示,计数器的值打印如上。当引用计数器的值为0时,表示没有任何引用指向对象或资源,可以安全地释放对象或资源,并进行相关的清理操作。
至此,引用计数器实验就完成了。

相关文章:
RK3568驱动指南|第九篇 设备模型-第92章 引用计数器实验
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工…...

苹果电脑Dock栏优化软件 mac功能亮点
hyperdock mac是一款Dock优化软件,hyperdock支持使用窗口自动排列功能,您可以直接通过将窗口拖拉至屏幕上方来快速最大化至全屏,又或者拖动到左右来进行左分屏和右分屏。而且Dock优化软件还有一个特色便是对Dock的强大管理哪里能力࿰…...
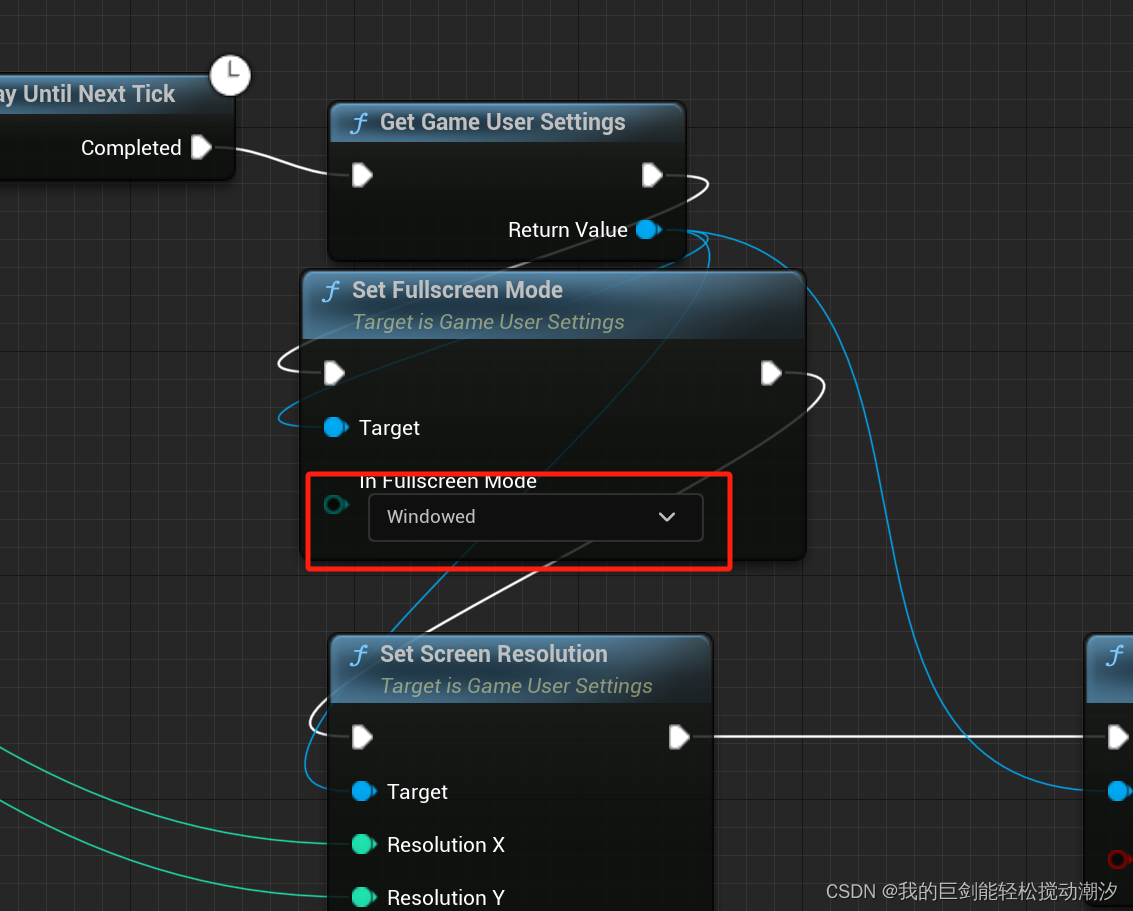
【UE5蓝图】读取本地json文件修改窗口大小
效果 插件 蓝图 1.判断文件存在 2.1文件不存在,生成文件 {"ResolutionX":540, "ResolutionY":960} 2.2文件存在,直接读取 3.设置窗口大小 遇到的坑 1.分辨率太大,导致效果不理想,建议先往小填写。 2.选对…...
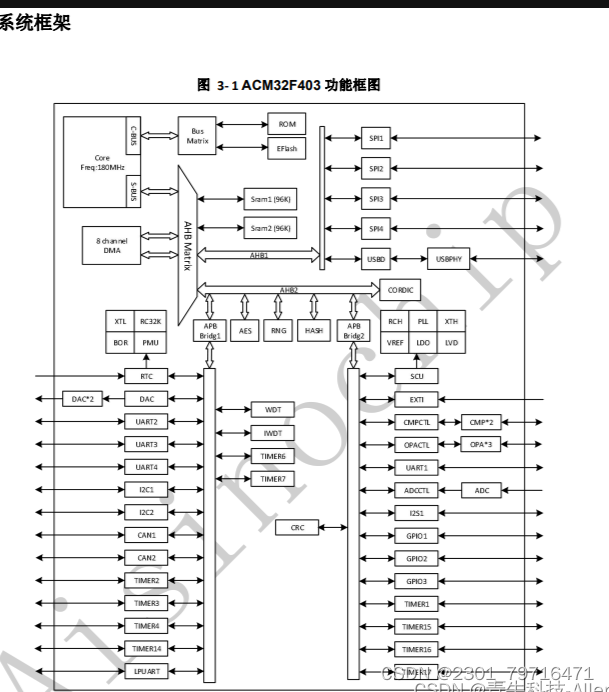
ACM32F403/F433 12 位多通道国产芯片,支持 MPU 存储保护功能,应用于工业控制,智能家居等产品中
ACM32F403/F433 芯片的内核基于 ARMv8-M 架构,支持 Cortex-M33 和 Cortex-M4F 指令集。芯片内核 支持一整套DSP指令用于数字信号处理,支持单精度FPU处理浮点数据,同时还支持Memory Protection Unit (MPU)用于提升应用的…...

2024最新前端React面试题:JSX是什么,它和JS有什么区别
JSX是什么,它和JS有什么区别 回答思路:1.编写方式--->2.分别是什么?--->3.分别是怎么编译的?1.编写方式2.分别是什么?3.分别是怎么编译的? 回答思路:1.编写方式—>2.分别是什么&#x…...
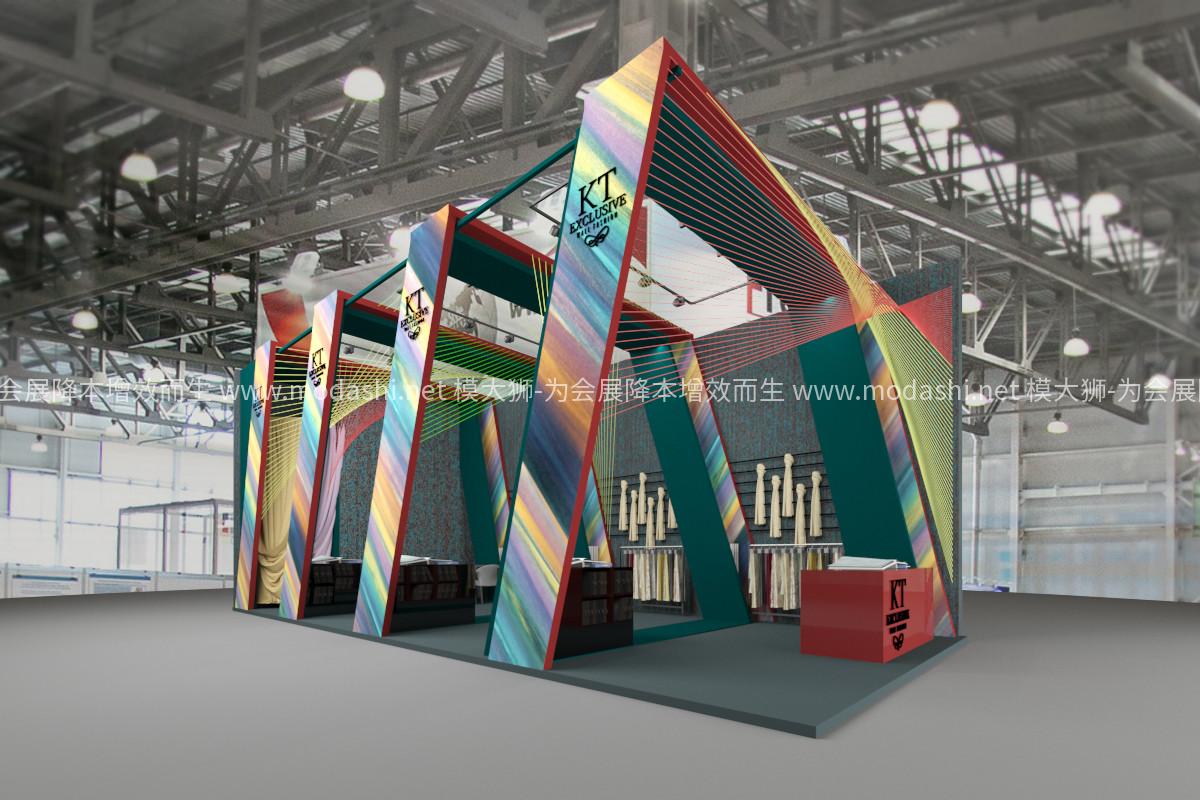
3d导入模型怎样显示原本材质---模大狮模型网
要在导入3D模型时保留原本的材质,您可以尝试以下方法: 导入前检查文件格式:确保您所使用的3D软件支持导入模型的文件格式。不同的软件对文件格式的支持有所差异,选择正确的文件格式可以更好地保留原始材质。 使用正确的材质库&am…...
web前端开发网页制作html/css结课作业
效果图展示: 注意事项: 引用JQuery文件地址和图片地址要更换一下。 百度网盘链接: http://链接:https://pan.baidu.com/s/1wYkmLr7csjBwQY6GmlYm4Q?pwd4332 提取码:4332 html界面展示: main.css代码部…...
工业相机如何实现实时和本地Raw格式图像和Bitmap格式图像的保存和相互转换(C#代码,UI界面版)
工业相机如何实现实时和本地Raw图像和Bitmap图像的保存和相互转换(C#代码,UI界面版) 工业相机图像格式工业相机实现Raw图像和Bitmap图像的保存和转换的技术背景在相机SDK中获取图像转换图像的代码分析工业相机回调函数里保存Bitmap图像数据工…...
C++初阶------------------入门C++
作者前言 🎂 ✨✨✨✨✨✨🍧🍧🍧🍧🍧🍧🍧🎂 🎂 作者介绍: 🎂🎂 🎂 🎉🎉🎉…...
深度学习核心技术与实践之自然语言处理篇
非书中全部内容,只是写了些自认为有收获的部分。 自然语言处理简介 NLP的难点 (1)语言有很多复杂的情况,比如歧义、省略、指代、重复、更正、倒序、反语等 (2)歧义至少有如下几种: …...
AI-ChatGPTCopilot
ChatGPT chatGPT免费网站列表:GitHub - LiLittleCat/awesome-free-chatgpt: 🆓免费的 ChatGPT 镜像网站列表,持续更新。List of free ChatGPT mirror sites, continuously updated. Copilot 智能生成代码工具 安装步骤 - 登录 github&am…...
网络安全-真实ip获取伪造与隐藏挖掘
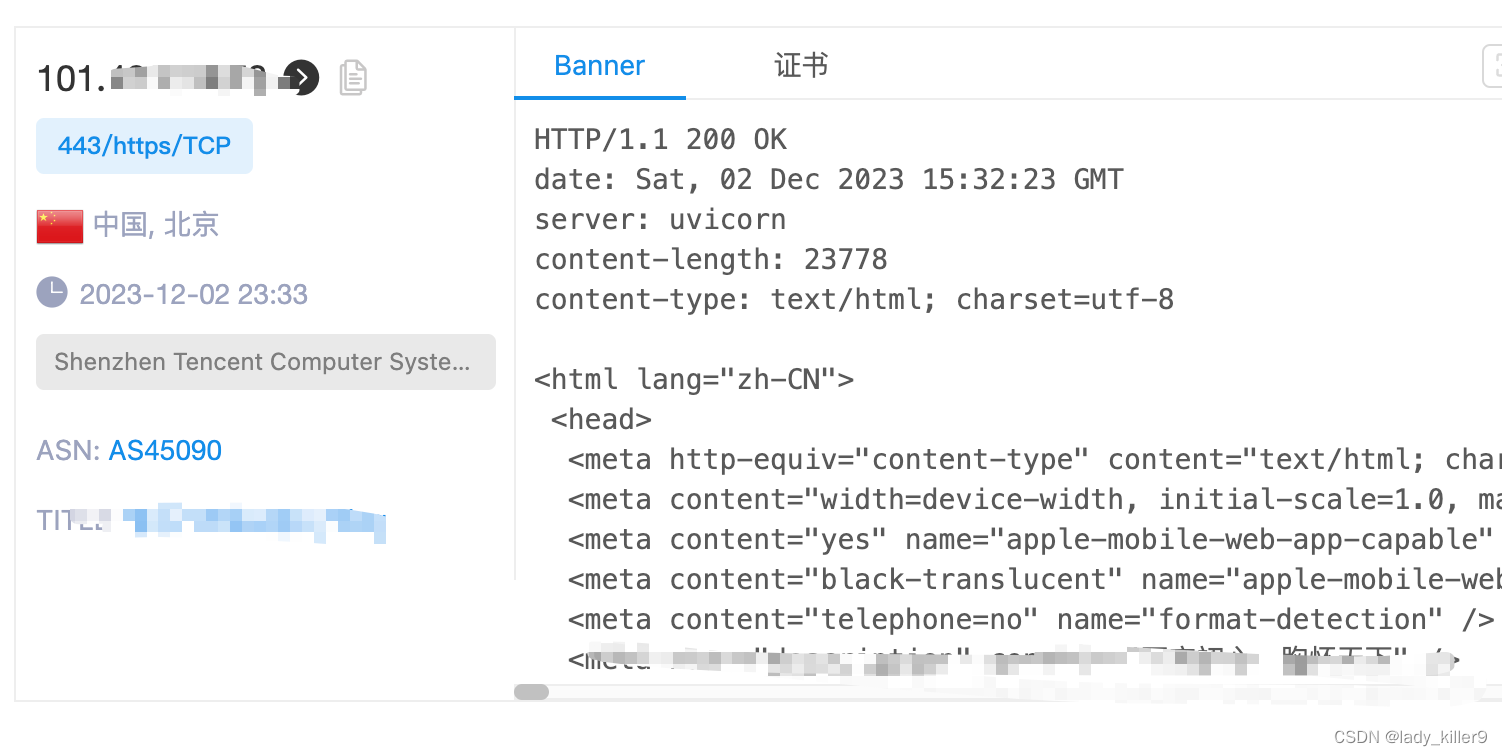
目录 真实ip获取应用层网络层网络连接TOAproxy protocol ip伪造应用层网络层TOA攻击proxy protocol 隐藏代理 挖掘代理多地ping历史DNS解析记录国外主机解析域名网站RSS订阅网络空间搜索引擎 总结参考 本篇文章学习一下如何服务如何获取真实ip,隐藏自己的ip…...
)
CMake入门教程【核心篇】添加子目录(add_subdirectory)
文章目录 1.概述2.添加子目录3.指定二进制目录4.排除子目录5.使用别名6.传递变量7.检查子目录是否存在 1.概述 add_subdirectory是 CMake 中的一个命令,用于向当前项目添加一个子目录。它的语法如下: #mermaid-svg-9zKJ3AvoVRln9hon {font-family:"…...

Prototype原型模式(对象创建)
原型模式:Prototype 链接:原型模式实例代码 注解 模式定义 使用原型实例指定创建对象的种类,然后通过拷贝这些原型来创建新的对象。 ——《设计模式》GoF 目的 在软件系统中,经常面临这“某些结构复杂的对象”的创建工作&am…...
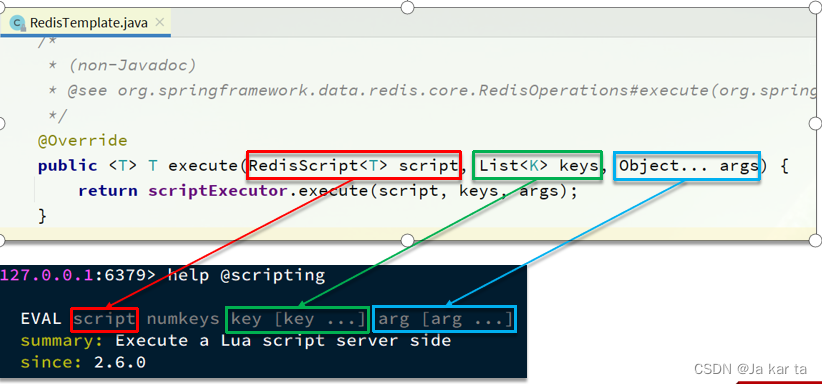
[Redis实战]分布式锁
四、分布式锁 4.1 基本原理和实现方式对比 分布式锁:满足分布式系统或集群模式下多进程可见并且互斥的锁。 分布式锁的核心思想就是让大家都使用同一把锁,只要大家使用的是同一把锁,那么我们就能锁住线程,不让线程进行…...
SpingBoot的项目实战--模拟电商【2.登录】
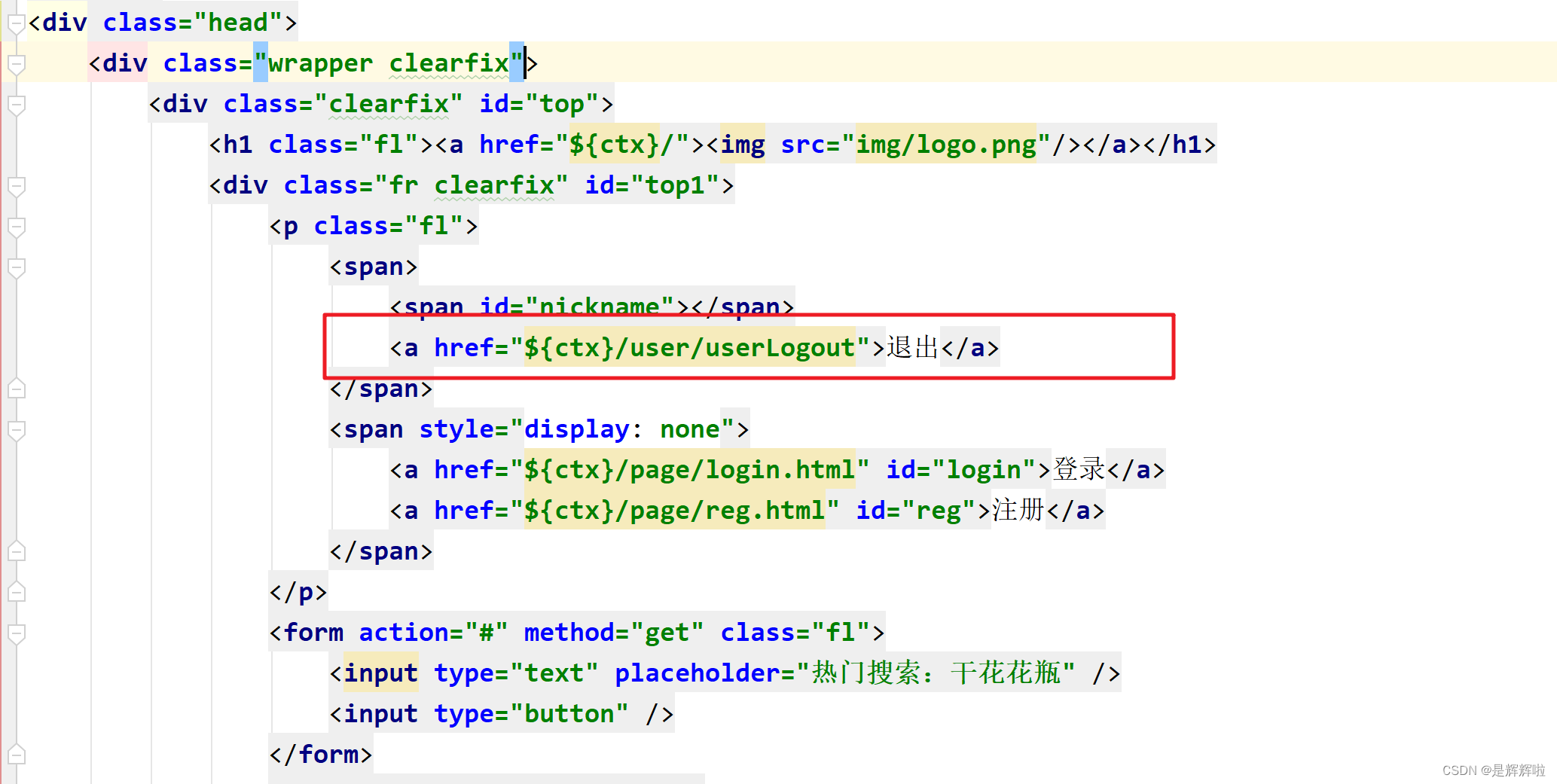
🥳🥳Welcome Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于SpringBoot电商项目的相关操作吧 目录 🥳🥳Welcome Huihuis Code World ! !🥳🥳 一.功能需求 二.代码编写 …...
http——https实现指南
第一部分:HTTPS安全证书简介 什么是HTTPS安全证书? 在网络通信中,HTTPS安全证书是一种由可信任的证书颁发机构(CA)签发的数字证书,用于保障网站与用户之间的数据传输安全。通过加密和身份验证,…...
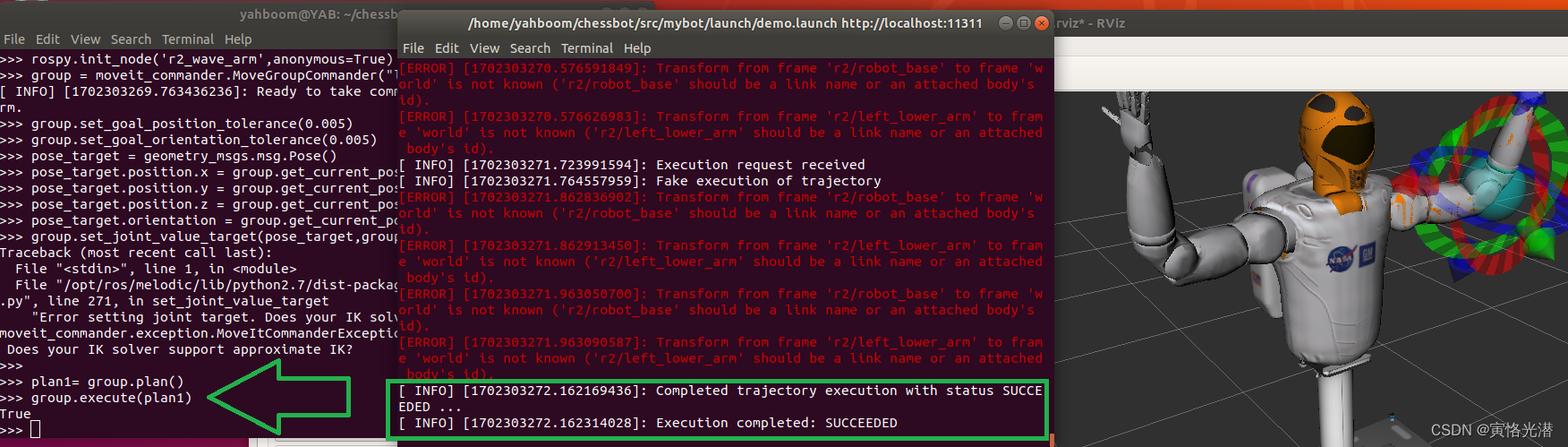
ROS仿真R2机器人之安装运行及MoveIt的介绍
R2(Robonaut 2)是NASA美国宇航局与GM通用联合推出的宇航人形机器人,能在国际空间站使用,可想而知其价格是非常昂贵,几百万美刀吧,还好NASA发布了一个R2机器人的Gazebo模型,使用模型就不需要花钱了,由于我们…...

【linux 多线程并发】线程属性设置与查看,绑定CPU,线程分离与可连接,避够多线程下的内存泄漏
线程属性设置 专栏内容: 参天引擎内核架构 本专栏一起来聊聊参天引擎内核架构,以及如何实现多机的数据库节点的多读多写,与传统主备,MPP的区别,技术难点的分析,数据元数据同步,多主节点的情况…...

70.乐理基础-打拍子-三连音
上一个内容:69.乐理基础-打拍子-大切分与变体-CSDN博客 62-66是总拍数为一拍的节奏型,一共有七个,68-69是两拍的节奏型。 三连音说明: 1.三连音的总拍数可以是一拍、两拍、四拍。。。。 2.打拍子比较难,或许需要用V字…...

【Microsystems Nanoengineering】利用多功能液晶偏振光栅抑制微型光学泵浦磁力计中的激光功率噪声
【Microsystems &Nanoengineering】利用多功能液晶偏振光栅抑制微型光学泵浦磁力计中的激光功率噪声 摘要 传统单光束光泵磁力仪(OPM)依赖分立偏振光学元件,体积大、装调复杂,且易受激光功率噪声限制。 本文提出 ** 多功能液晶…...

如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题
如何用LRCGET歌词下载神器一键解决数千首离线音乐歌词同步难题 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否拥有一个庞大的离线音乐库&#x…...

BACnet实战:从协议栈到楼宇自控系统集成
1. BACnet协议栈基础解析 第一次接触BACnet协议时,我被它复杂的文档和术语搞得晕头转向。经过几个实际项目的打磨,我发现理解这个协议最有效的方式就是从它的四层架构开始。BACnet采用了精简的OSI模型,只保留了最核心的四层:物理层…...

LTspice仿真波形图看不清?这4个隐藏操作技巧让你效率翻倍
LTspice波形分析进阶指南:4个被低估的高效操作技巧 当电路仿真结果呈现在眼前时,多数用户会本能地拖动鼠标进行粗略查看。但真正的高手知道,波形分析阶段的细微操作差异,往往决定了问题定位的效率与设计迭代的速度。本文将揭示那些…...
实时监测设备健康状态,结合TSN网络实现毫秒级数据传输)
AI驱动的工业预测性维护技术实践:AI驱动的预测性维护系统通过多传感器融合(振动、温度、电流等)实时监测设备健康状态,结合TSN网络实现毫秒级数据传输
标签:预测性维护 PHM 工业AI 振动分析 TSN 设备管理 引言:设备算命先生的时代来了 “老张,你这台风机轴承怕是撑不过两周了。” 如果有个"设备算命先生"能掐指一算就说出这句话,工厂的设备经理们大概会把他供起来。但在2024年,这个"算命先生"真的出…...

现代安全监控系统构建指南:从IPVS架构到智能分析实战
1. 项目概述:从“想要”到“拥有”,安全监控系统的核心价值“安华高科技给你想要的安全监控系统!”——这个标题听起来像是一句承诺,但背后其实是一个复杂的系统工程。作为一名在安防行业摸爬滚打了十几年的从业者,我见…...

基于MCP协议构建AI智能体记忆系统:mnemo-mcp实战指南
1. 项目概述:一个为AI记忆而生的开源工具最近在折腾AI应用开发,特别是围绕大语言模型(LLM)构建智能体(Agent)时,一个绕不开的痛点就是“记忆”。模型本身没有持久化记忆,每次对话都是…...

UAVLogViewer:无人机飞行日志分析的终极免费解决方案
UAVLogViewer:无人机飞行日志分析的终极免费解决方案 【免费下载链接】UAVLogViewer An online viewer for UAV log files 项目地址: https://gitcode.com/gh_mirrors/ua/UAVLogViewer 面对无人机飞行日志中混乱的数据格式、复杂的参数解读和难以直观展示的三…...

模型服务化部署:用vLLM/Ollama搭建高并发API,支持流式输出与多轮对话
系列导读 你现在看到的是《本地大模型私有化部署与优化:从入门到生产级实战》的第 3/10 篇,当前这篇会重点解决:让你的本地模型像ChatGPT一样提供稳定API,支持真实业务场景的并发请求。 上一篇回顾:第 2 篇《模型下载与转换实战:从HuggingFace到GGUF/SafeTensors,格式…...

cve-search高级应用:三个实战场景解决企业漏洞管理痛点
cve-search高级应用:三个实战场景解决企业漏洞管理痛点 【免费下载链接】cve-search cve-search - a tool to perform local searches for known vulnerabilities 项目地址: https://gitcode.com/gh_mirrors/cv/cve-search 在日益复杂的安全威胁环境中&#…...