ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
- 1. 源由
- 2. 安装
- 3. 参数配置
- 3.1 配置光流定位
- 3.2 配置激光测距
- 3.3 辅助配置
- 4. 测试
- 4.1 光流数据测试
- 4.2 测距数据测试
- 4.3 飞行注意事项
- 4.4 实际飞行测试
- 5. 参考资料
1. 源由
之前介绍过MatekSys Optical Flow 3901-L0X模块:
【1】传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
【2】iNavFlight之MSP v2 Sensor报文格式
当时主要是在inav固件上进行测试,整体感觉效果一般。
鉴于本次打算将电传模块换到VTOL飞机上去飞固定翼,
【1】Ardupilot开源飞控之VTOL之旅:配件规格
【2】Ardupilot开源飞控之VTOL之旅:配件试装
所以借着这个机会,将MatekSys Optical Flow 3901-L0X替换Mark4的电传,看下Ardupilot效果如何?
2. 安装
- 电源供电5V
- UART4_Tx/UART4_Rx用于通信
- 安装方法参考:传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
3. 参数配置
3.1 配置光流定位
FLOW_TYPE = 7 (MSP)
FLOW_FXSCALER = -800
FLOW_FYSCALER = -800
SERIAL4_PROTOCOL = 32 (MSP)
SERIAL4_BAUD = 115 (115200 bps)
3.2 配置激光测距
RNGFND1_TYPE = 32 (MSP)
RNGFND1_MIN_CM = 8 to set range finder’s minimum range to 0.08m
RNGFND1_MAX_CM = 200 to set range finder’s maximum range to 2m
RNGFND1_ORIENT = 25 (Facing Down)
注:文档中不推荐使用这颗板载的激光测距传感,可能是测量距离太近(0~2m),或者数据的稳定性受到环境影响较大。
3.3 辅助配置
-
Loiter和PosHold飞行模式下,需要提供:光流+测距+GPS定位信息。
-
FlowHold飞行模式下,仅需提供:光流位置信息。
-
定位优化:(GPS/IMU/OpticalFlow在15cm距离以内,通常对性能没有影响);距离重心的位置;
Optical Flow
FLOW_POS_X, FLOW_POS_Y, FLOW_POS_Z
FLOW_POS_X = 0.05 set to 5 cm forward
FLOW_POS_Y = 0
FLOW_POS_Z = 0
IMU
INS_POS1_X, INS_POS1_Y, INS_POS1_Z
INS_POS2_X, INS_POS2_Y, INS_POS2_Z
INS_POS3_X, INS_POS3_Y, INS_POS3_Z
GPS
GPS_POS1_X, GPS_POS1_Y, GPS_POS1_Z
GPS_POS2_X, GPS_POS2_Y, GPS_POS2_Z
Range Finder (Sonar or Lidar)
RNGFND1_POS_X, RNGFND1_POS_Y, RNGFND1_POS_Z
RNGFND2_POS_X, RNGFND2_POS_Y, RNGFND2_POS_Z
Visual Odometry
VISO_POS_X, VISO_POS_Y, VISO_POS_Z
4. 测试
4.1 光流数据测试
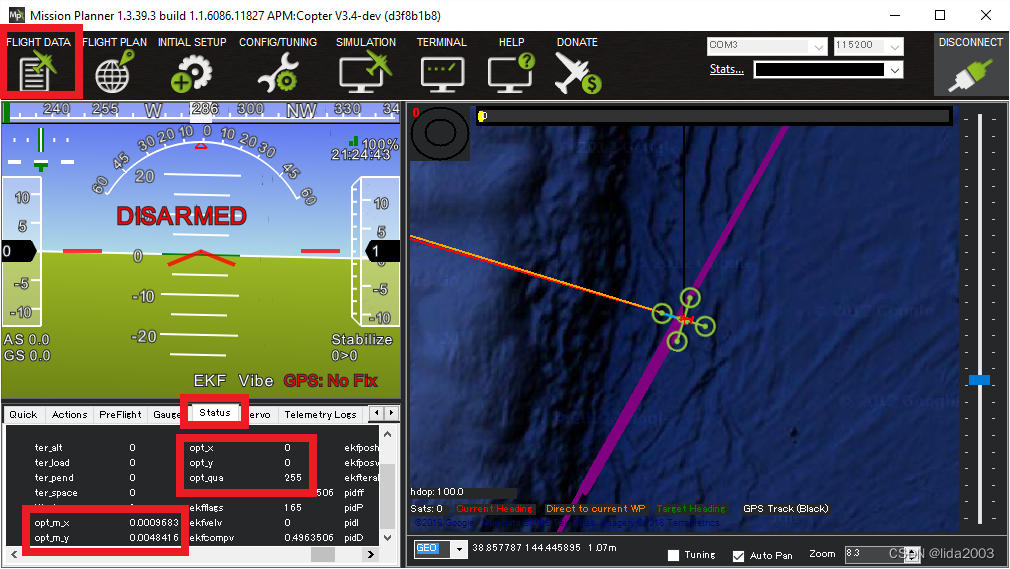
opt_m_x,opt_m_y,opt_qua显示非零值,持续跳动。
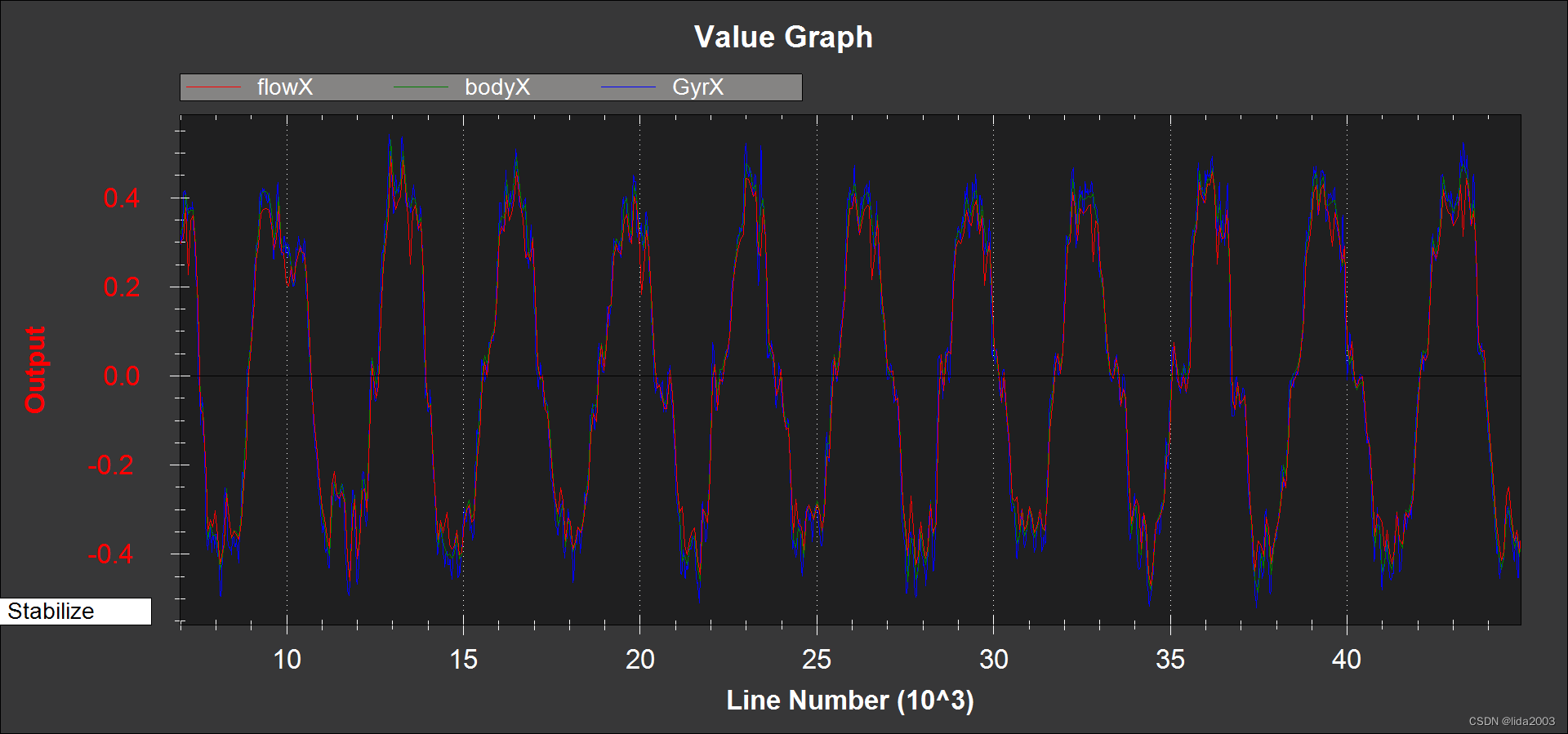
OF.flowX,OF.bodyX,IMU.GyrX趋势和大小基本一致
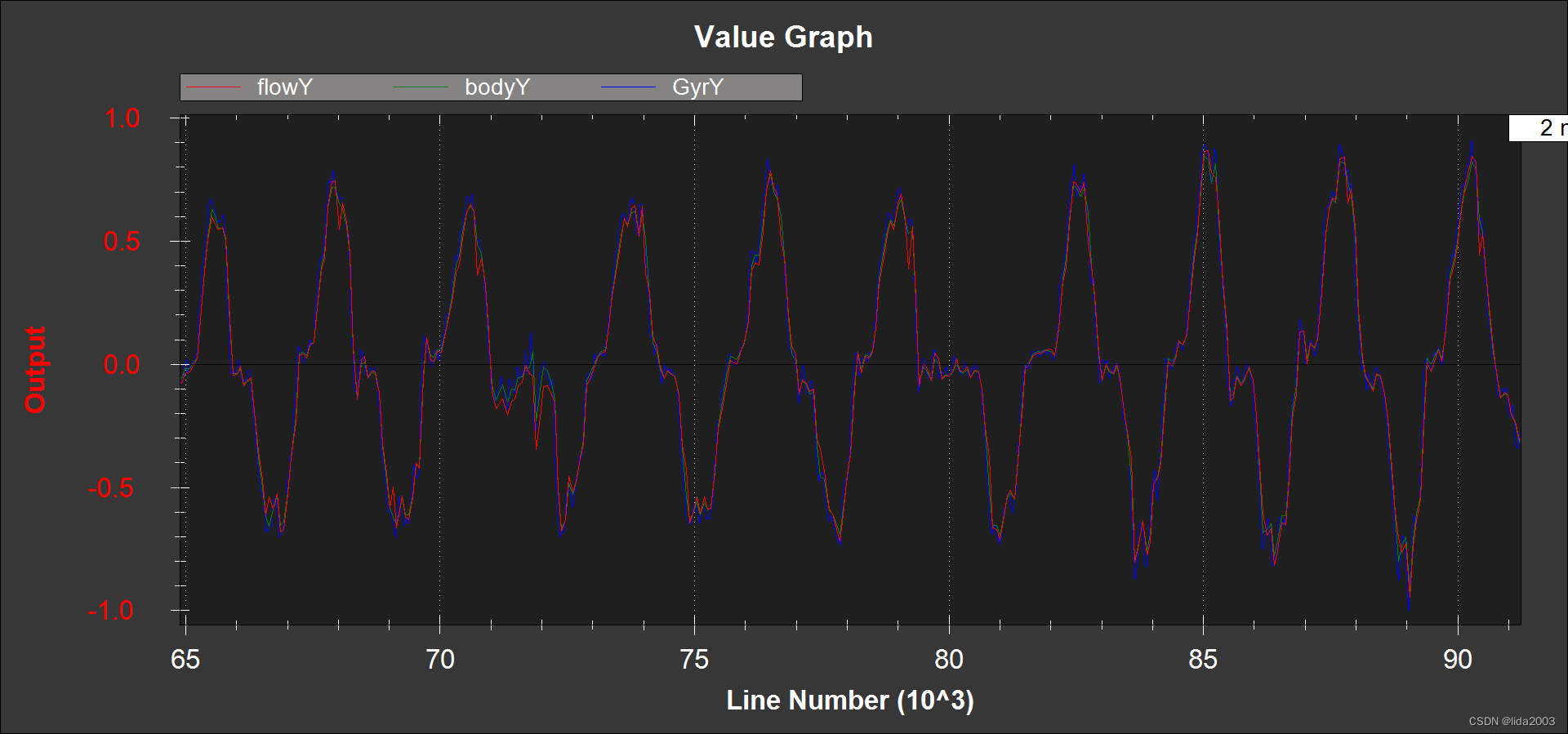
OF.flowY,OF.bodyY,IMU.GyrY趋势和大小基本一致
4.2 测距数据测试
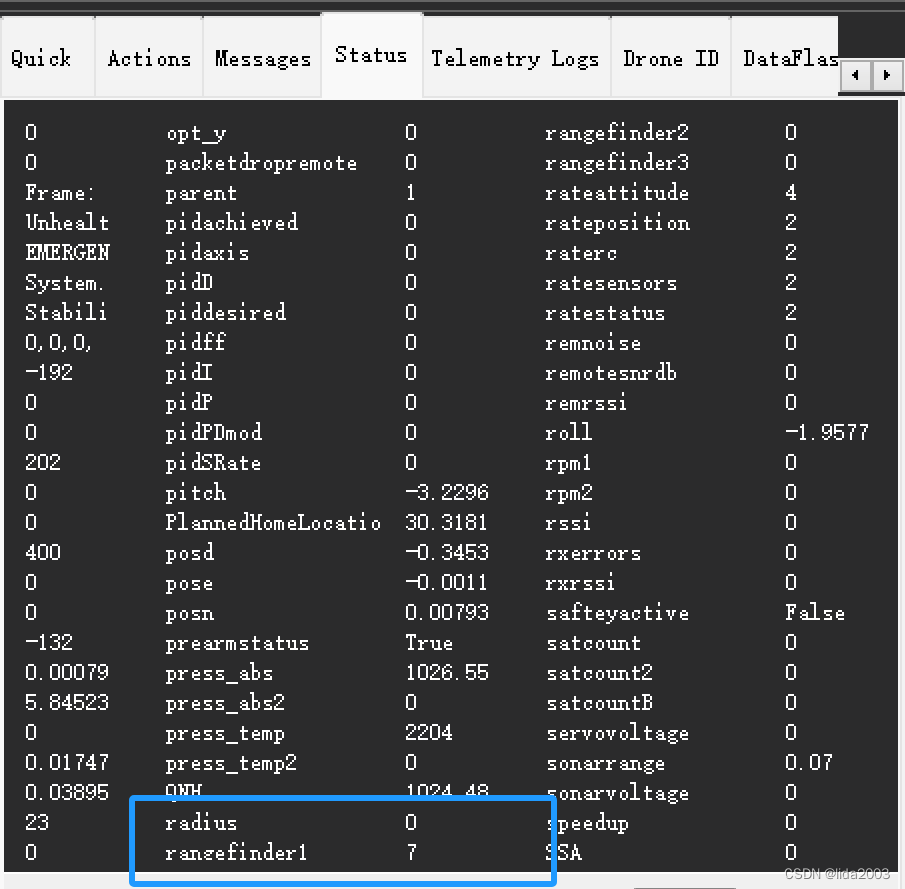
状态栏 rangefinder1不为零,且随着姿态、高度变化,数值缓慢线性变化。
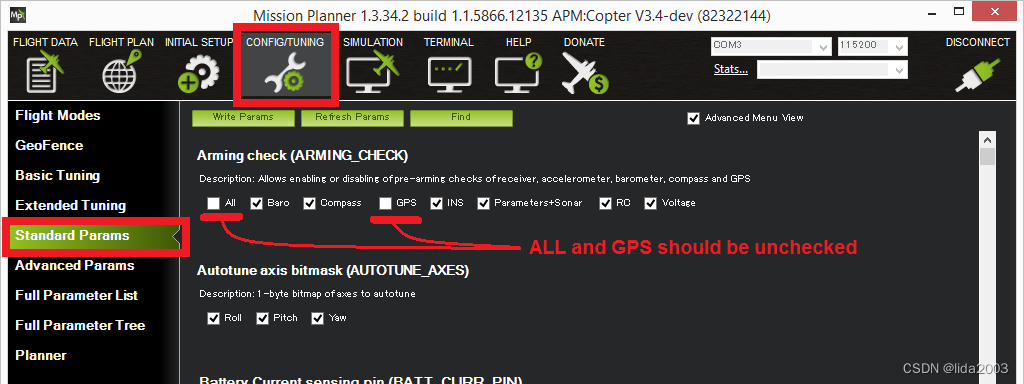
4.3 飞行注意事项
- 飞行预检查,取消GPS检查项。
注:室内无GPS,若不取消,无法arm。
2. 第一次短距离STABILIZE 飞行(通常现在都是4.4.0以上的固件,所以大部分情况下采用的是EKF3算法)
EK3_SRC1_VELXY = 0 //we don’t want the optical flow being used by the EKF at this stage
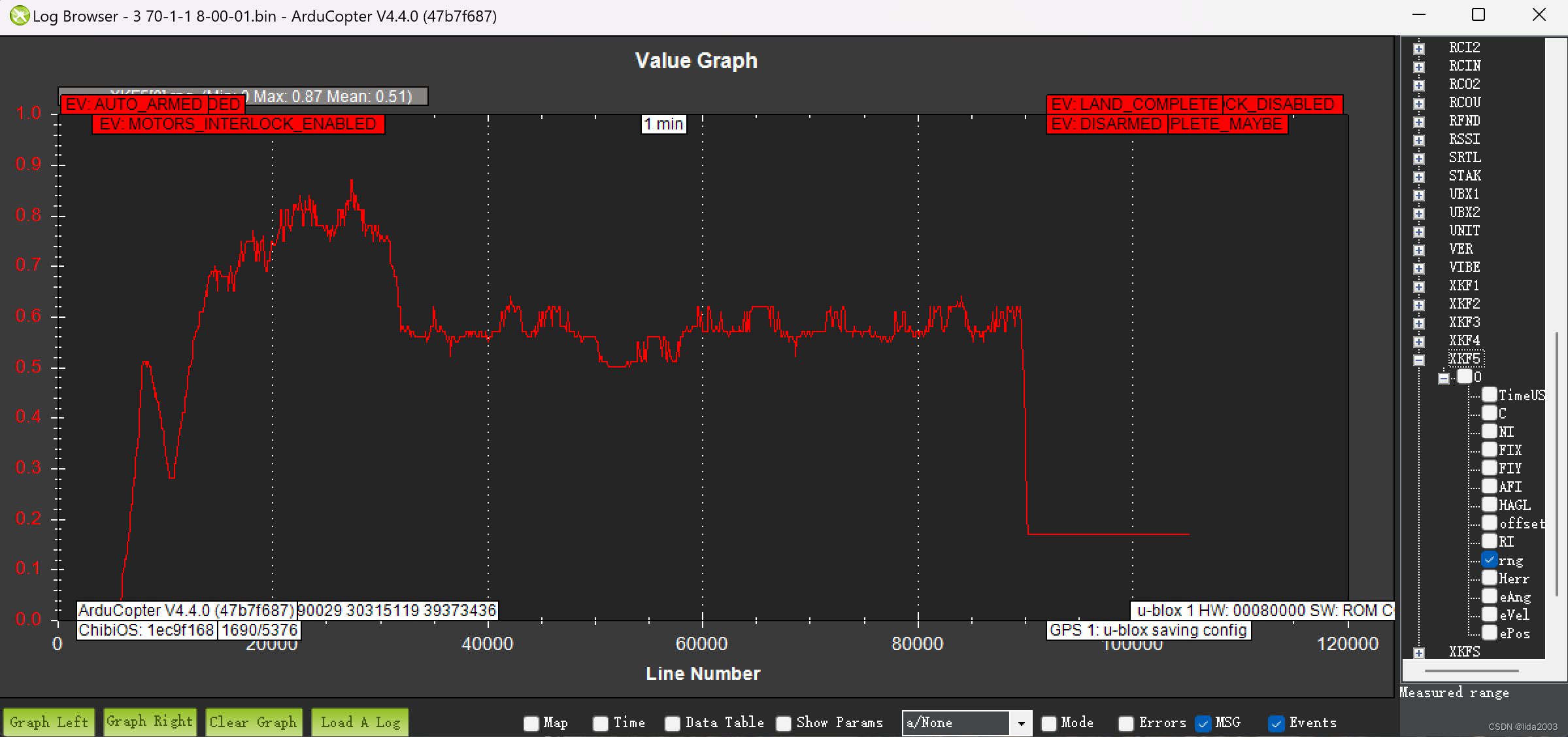
短距离飞行后,下载日志检查:
OF.bodyX,OF.bodyY与IMU.GyrX,IMU.GyrY都有变化且趋势一致EKF5.meaRng变化趋势和范围与实际飞机高度变化一致
注:检查日志数据EKF5.meaRng,最新4.4.0固件XKF5.rng。
- HereFlow calibration - what and where is EKF5.meaRng
- What happened to meaRng?
- 第二次飞行
室内FlowHold起飞
EK3_SRC1_VELXY = 5 //OpticalFlow
EK3_SRC1_POSXY = 0 //不要GPS
室外Loiter起飞
EK3_SRC1_VELXY = 5 //OpticalFlow
EK3_SRC1_POSXY = 3 //GPS
注:通常户外是有GPS的,所以Loiter 是可以正常起飞;但是室内没有GPS,此时就需要使用FlowHold。
参考:Prearm: Need Position Estimate
4.4 实际飞行测试
这里配置了第二次室内飞行参数,验证MatekSys Optical Flow 3901-L0X的使用效果。
Ardupilot 4.4.0 Mark4 + MatekSys Optical Flow 3901-L0X + FlowHold
对比iNav光流悬停,详见:传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
iNav
5. 参考资料
【1】传感模块:MATEKSYS Optical Flow & LIDAR 3901-L0X
【2】iNavFlight之MSP v2 Sensor报文格式
【3】MatekSys Optical Flow 3901-L0X
相关文章:
ArduPilot开源代码之MatekSys Optical Flow 3901-L0X
ArduPilot开源代码之MatekSys Optical Flow 3901-L0X 1. 源由2. 安装3. 参数配置3.1 配置光流定位3.2 配置激光测距3.3 辅助配置 4. 测试4.1 光流数据测试4.2 测距数据测试4.3 飞行注意事项4.4 实际飞行测试 5. 参考资料 1. 源由 之前介绍过MatekSys Optical Flow 3901-L0X模块…...
【时钟】分布式时钟HLC|Logical Time|Vector Clock|True Time
目录 简略 详细 附录 1 分布式系统不能使用NTP的原因 简略 分布式系统中不同于单机系统不能使用NTP(网络时间协议(Network Time Protocol))来获取时间,所以我们需要一个特别的方式来获取分布式系统中的时间,mvcc也是使用time保证读…...

人工智能AI与3D视觉技术的结合正在引领新一代移动机器人的革新
随着科技的飞速发展,人工智能AI与3D视觉技术的结合正在引领新一代移动机器人的革新。富唯智能移动机器人,以其独特的3D视觉技术,赋予了移动机器人一双“智慧之眼”,从而为现代工业自动化带来了前所未有的突破。 富唯智能移动机器…...

NSSCTF 简单包含
开启环境: 使用POST传flag,flag目录/var/www/html/flag.php 先使用post来尝试读取该flag.php 没反应: 查看一下源码index.php,看有什么条件 base64解密: <?php$path $_POST["flag"];if (strlen(file_get_contents(php://input)) <…...

FlinkSQL处理Canal-JSON数据
背景信息 Canal是一个CDC(ChangeLog Data Capture,变更日志数据捕获)工具,可以实时地将MySQL变更传输到其他系统。Canal为变更日志提供了统一的数据格式,并支持使用JSON或protobuf序列化消息(Canal默认使用…...
玩转贝启科技BQ3588C开源鸿蒙系统开发板 —— DevEco Studio下载与安装
一、下载DevEco Studio IDE开发工具 1. 登录鸿蒙官网 网址为: 华为HarmonyOS智能终端操作系统官网 | 应用设备分布式开发者生态 页面如下: 2. 搜索“DevEco Studio IDE” 点击右上角的“请输入关键词”,在其中搜索“DevEc…...

大模型上下文长度的超强扩展:从LongLora到LongQLora
前言 本文一开始是《七月论文审稿GPT第2版:从Meta Nougat、GPT4审稿到Mistral、LongLora Llama》中4.3节的内容,但考虑到 一方面,LongLora的实用性较高二方面,为了把LongLora和LongQLora更好的写清楚,而不至于受篇幅…...

pdf格式转换为txt格式
pdf文档转换为txt文档 首先在python3虚拟环境中安装PyPDF2 Python 3.6.8 (default, Jun 20 2023, 11:53:23) [GCC 4.8.5 20150623 (Red Hat 4.8.5-44)] on linux Type "help", "copyright", "credits" or "license" for more infor…...

scss使用for循环遍历,动态赋值类名并配置不同颜色
需求:后端要传入不同的等级,前端通过等级展示不同的字体颜色,通过scss遍历更有利于动态修改颜色或者增删等级 1.通过 for $i from 1 through 4 定义循环,索引值为i 2.nth($colors, $i) 取出对应的颜色 $colors: #ff0000, #00ff…...

GaussDB数据库使用COPY命令导数
目录 一、前言 二、GaussDB数据库使用COPY命令导数语法 1、语法COPY FROM 2、语法COPY TO 3、特别说明及参数示意 三、GaussDB数据库使用COPY命令导数示例 1、操作步骤 2、准备工作(示例) 3、把一个表的数据拷贝到一个文件(示例&…...

SunFMEA软件免费试用:FMEA的目标和限制是什么?
免费试用FMEA软件-免费版-SunFMEA FMEA,即故障模式与影响分析,是一种预防性的质量工具,旨在识别、评估和优先处理潜在的故障模式及其对系统性能的影响。其目标是提高产品和过程的可靠性和安全性,降低产品故障的风险,并…...
【Redis交响乐】Redis中的数据类型/内部编码/单线程模型
文章目录 一. Redis中的数据类型和内部编码二. Redis的单线程模型面试题: redis是单线程模型,为什么效率之高,速度之快呢? 在上一篇博客中我们讲述了Redis中的通用命令,本篇博客中我们将围绕每个数据结构来介绍相关命令. 一. Redis中的数据类型和内部编码 type命令实际返回的…...

APK 瘦身
APK 瘦身的主要原因是考虑应用的下载转化率和留存率,应用太大了,用户可能就不下载了。再者,因为手机空间问题,用户有可能会卸载一些占用空间比较大的应用,所以,应用的大小也会影响留存率。 1 APK 的结构 …...

GitHub上的15000个Go模块存储库易受劫持攻击
内容概要: 目前研究发现,GitHub上超过15000个Go模块存储库容易受到一种名为“重新劫持”的攻击。 由于GitHub用户名的更改会造成9000多个存储库容易被重新劫持,同时因为帐户删除,会对6000多个存储库造成重新劫持的危机。目前统计…...

避免3ds Max效果图渲染一片黑的4个正确解决方法
在进行3ds Max效果图渲染时,有时候会遇到渲染一片黑的情况,这给我们的工作带来了很大的困扰。为了解决这个问题,下面我将介绍4个正确的解决方法。 1.相机位置 首先需要考虑场景内的相机位置是否有问题。如果相机放在了模型的内部或者墙体的外…...
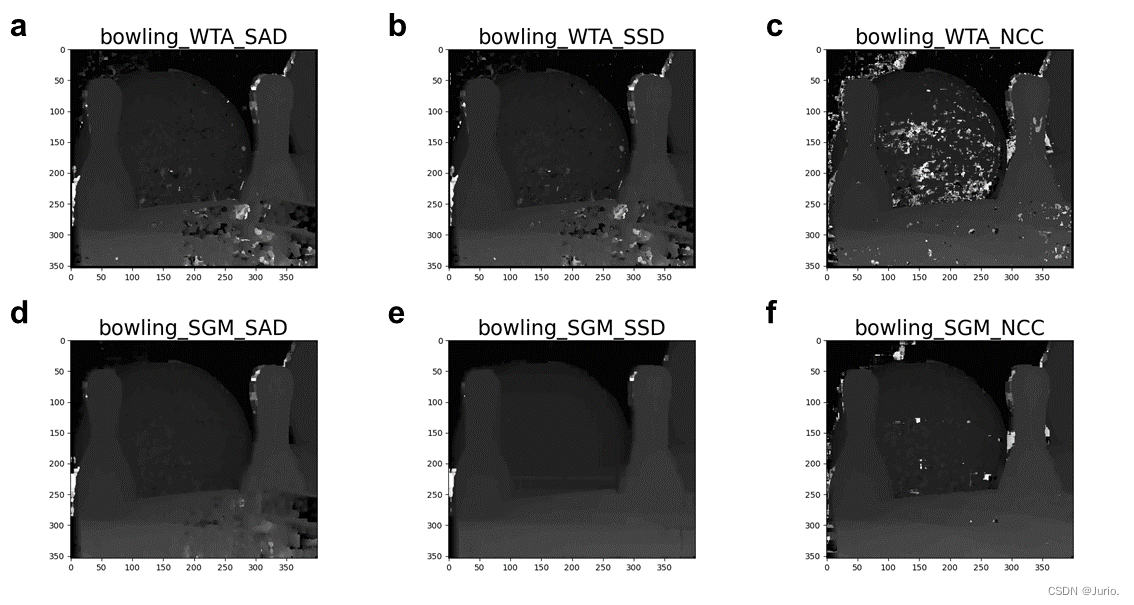
UI演示双视图立体匹配与重建
相关文章: PyQt5和Qt designer的详细安装教程:https://blog.csdn.net/qq_43811536/article/details/135185233?spm1001.2014.3001.5501Qt designer界面和所有组件功能的详细介绍:https://blog.csdn.net/qq_43811536/article/details/1351868…...
添加一个编辑的小功能(PHP的Laravel)
一个编辑的按钮可以弹出会话框修改断更天数 前台 加一个编辑按钮的样式,他的名字是固定好的 之前有人封装过直接用就好,但是一定放在class里面,不要放在id里面 看见不认识的方法一定要去看里面封装的是什么 之前就是没有看,所以…...

YOLOv8改进 | 主干篇 | ConvNeXtV2全卷积掩码自编码器网络
一、本文介绍 本文给大家带来的改进机制是ConvNeXtV2网络,ConvNeXt V2是一种新型的卷积神经网络架构,它融合了自监督学习技术和架构改进,特别是加入了全卷积掩码自编码器框架和全局响应归一化(GRN)层。我将其替换YOLOv8的特征提取网络,用于提取更有用的特征。经过我的实…...

elasticsearch7.17.9两节点集群改为单节点
需求 将数据从node-23-1节点中迁移到node-83-1节点。但是现在node-83-1并没有加入到集群中,因此首先将node-83-1加入到node-23-1的集群 解决方案 使用ES版本为7.17.9,最开始设置集群为一个节点,node-23-1的配置如下 cluster.name: my-app…...
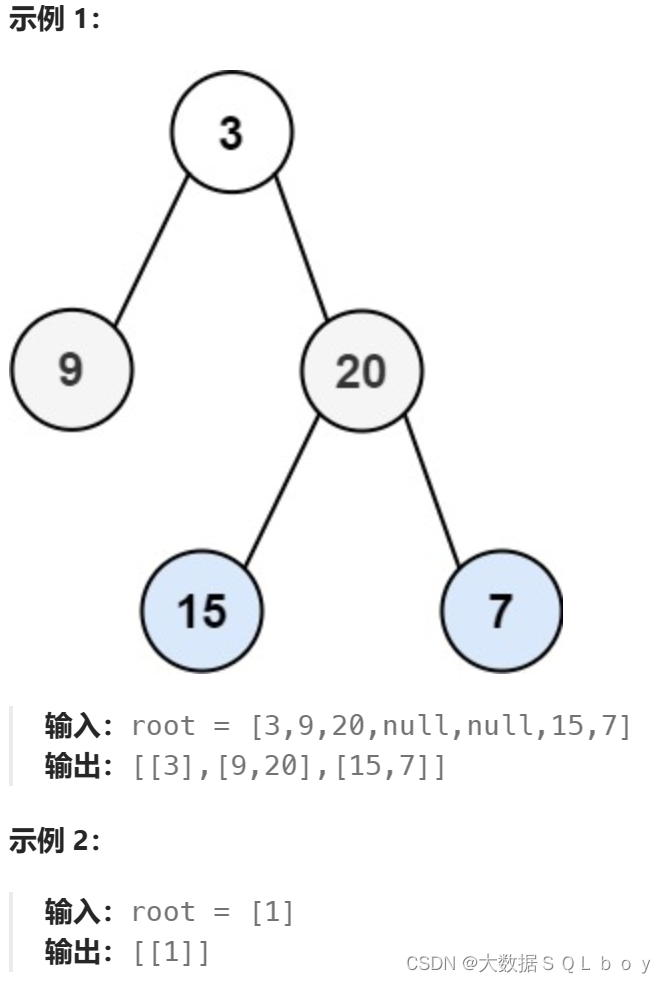
二叉树的层序遍历,力扣
目录 题目地址: 题目: 我们直接看题解吧: 解题方法: 方法分析: 解题分析: 解题思路: 代码实现: 代码补充说明: 题目地址: 102. 二叉树的层序遍历 - 力扣&…...

从好奇号火星着陆看复杂系统工程:天空起重机方案与工程管理启示
1. 项目概述:从“不可能”到“火星新地标”的工程壮举2012年8月6日,当“好奇号”火星车在盖尔陨石坑成功着陆,传回第一张火星地表照片时,整个喷气推进实验室(JPL)控制中心沸腾了。这不仅仅是一次成功的行星…...

同样遍历 Mat,为什么你的代码慢 10 倍?
文章目录前言一、什么是不连续Mat?1.产生不连续内存的常见场景2.连续与不连续内存本质区别二、常见错误遍历方式&踩坑分析1.错误一:at<>()逐像素访问(速度慢)2.错误二:强行使用一维 data 指针(高危崩溃&…...

ARM HCR_EL2寄存器解析与虚拟化控制
1. ARM HCR_EL2寄存器架构解析HCR_EL2(Hypervisor Configuration Register)是ARMv8/v9架构中用于控制虚拟化行为的关键系统寄存器。作为Hypervisor的主要控制接口,它定义了EL2对低特权级(EL1/EL0)执行环境的监控策略。…...

5 款实用漏洞扫描工具,网安从业者必备收藏
漏洞扫描是指基于漏洞数据库,通过扫描等手段对指定的远程或者本地计算机系统的安全脆弱性进行检测,发现可利用漏洞的一种安全检测的行为。 在漏洞扫描过程中,我们经常会借助一些漏扫工具,市面上漏扫工具众多,其中有一…...

Java 开发,不要瞎忙,十点睡觉六点起床,天塌不了
你是一名 Java 开发,不要瞎忙,十点睡觉六点起床,天塌不了。我的想法对吗? 没问题,这就给你上干货。想在 Java 开发这行准点下班,光靠手速快是不够的,核心在于掌控节奏和学会拒绝。 这里有一份帮…...

开关电源EMC设计:从原理到实践的关键技术
1. 开关电源EMC设计基础 开关电源因其高效率和小型化优势,在现代电子设备中广泛应用。然而,高频开关动作带来的电磁干扰(EMI)问题不容忽视。作为一名电源工程师,我经常需要面对各种EMC挑战。记得有一次,我们团队设计的工业电源模块…...

ETS2LA:为《欧洲卡车模拟2》带来终极智能驾驶体验的5大核心功能
ETS2LA:为《欧洲卡车模拟2》带来终极智能驾驶体验的5大核心功能 【免费下载链接】Euro-Truck-Simulator-2-Lane-Assist Plugin based interface program for ETS2/ATS. 项目地址: https://gitcode.com/gh_mirrors/eur/Euro-Truck-Simulator-2-Lane-Assist 想…...

Notero终极指南:打通Zotero与Notion的学术工作流桥梁
Notero终极指南:打通Zotero与Notion的学术工作流桥梁 【免费下载链接】notero A Zotero plugin for syncing items and notes into Notion 项目地址: https://gitcode.com/gh_mirrors/no/notero 当你在Zotero中积累了数百篇文献,却发现整理和引用它…...

2026届学术党必备的六大降重复率平台推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 令AI精确执行任务的基础,是下达精准的指令,此即降AI指令。降AI指令专…...

3步在Windows上安装APK应用:告别安卓模拟器的轻量级解决方案
3步在Windows上安装APK应用:告别安卓模拟器的轻量级解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上直接运行Android应用却不想安…...