UE5 C++(十一)— 碰撞检测
文章目录
- 代理绑定BeginOverlap和EndOverlap
- Hit事件的代理绑定
- 碰撞设置
代理绑定BeginOverlap和EndOverlap
首先,创建自定义ActorC++类 MyCustomActor
添加碰撞组件
#include "Components/BoxComponent.h"public:UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class UBoxComponent *MyBoxComponent;
AMyCustomActor::AMyCustomActor()
{PrimaryActorTick.bCanEverTick = true;// 创建组件MySceneComponent = CreateDefaultSubobject<USceneComponent>(TEXT("CustomScene"));MyMeshComponent = CreateDefaultSubobject<UStaticMeshComponent>(TEXT("CustomStaticMesh"));MyBoxComponent = CreateDefaultSubobject<UBoxComponent>(TEXT("CustomBox"));
}
动态绑定BeginOverlap和EndOverlap
public://声明绑定函数UFUNCTION()void BeginOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex, bool bFromSweep, const FHitResult &SweepResult);UFUNCTION()void EndOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex);
// Called when the game starts or when spawned
void AMyCustomActor::BeginPlay()
{Super::BeginPlay();MyBoxComponent->OnComponentBeginOverlap.AddDynamic(this, &AMyCustomActor::BeginOverlapFunction);MyBoxComponent->OnComponentEndOverlap.AddDynamic(this, &AMyCustomActor::EndOverlapFunction);
}void AMyCustomActor::BeginOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex, bool bFromSweep, const FHitResult &SweepResult)
{GEngine->AddOnScreenDebugMessage(-1, 5.f, FColor::Red, FString::Printf(TEXT("BeginOverlapFunction !!")));
}
void AMyCustomActor::EndOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex)
{GEngine->AddOnScreenDebugMessage(-1, 5.f, FColor::Red, FString::Printf(TEXT("EndOverlapFunction !!")));
}
编译脚本之后
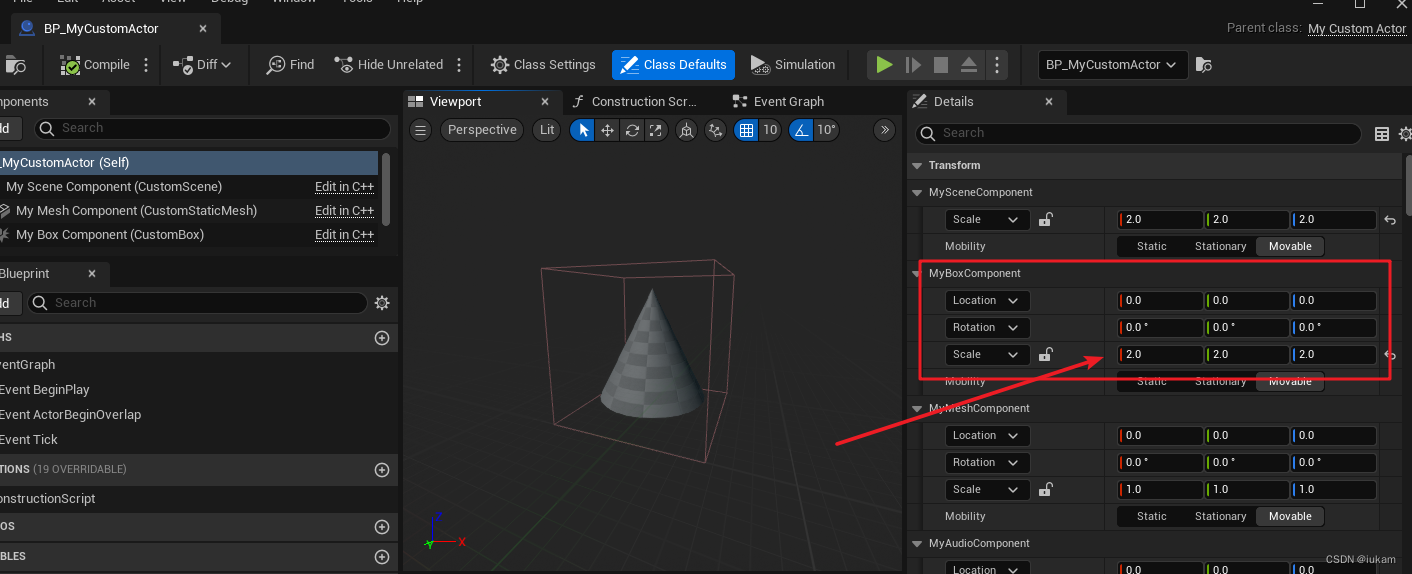
创建刚才脚本的蓝图类 BP_MyCustomActor 并放到场景中
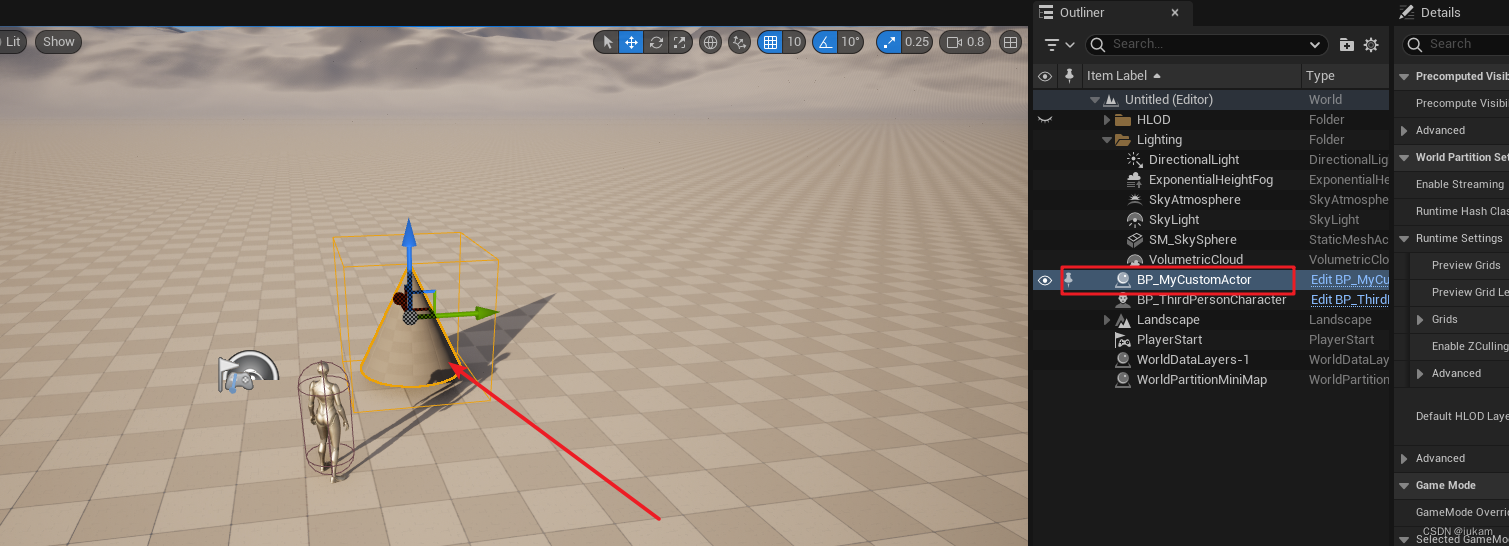
调整碰撞区域大小
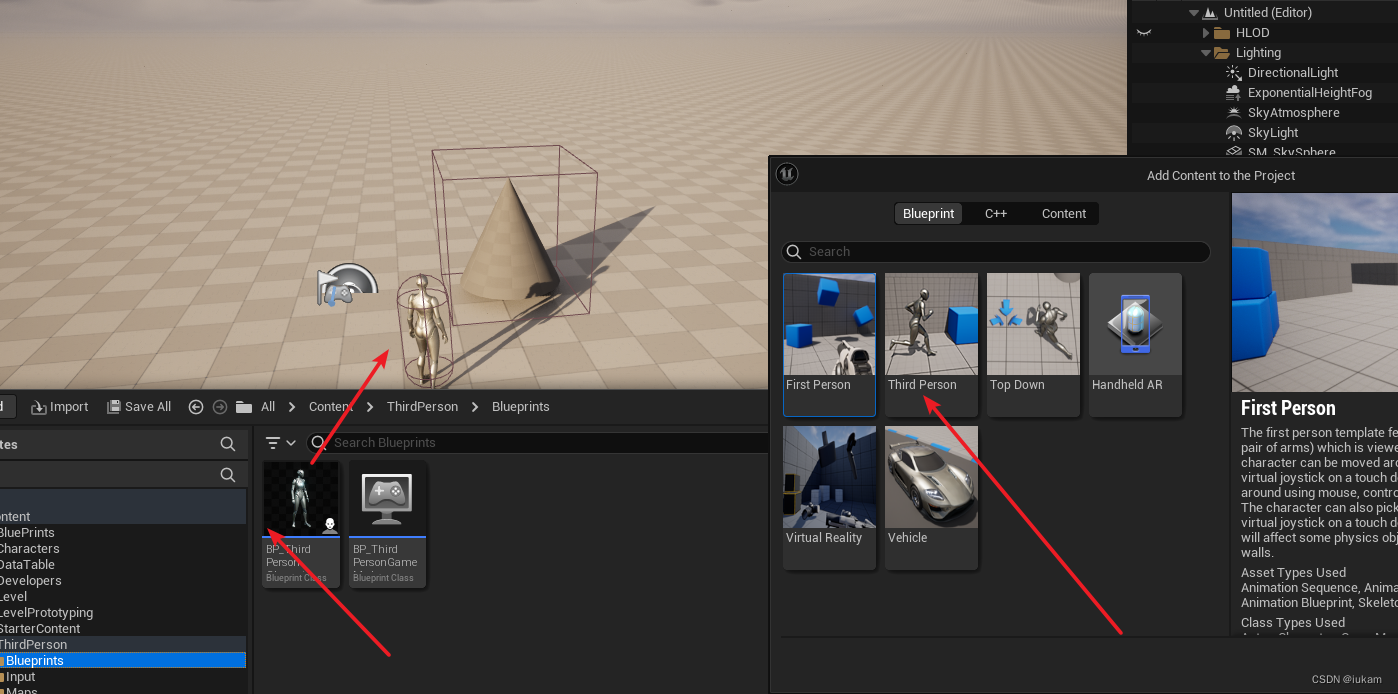
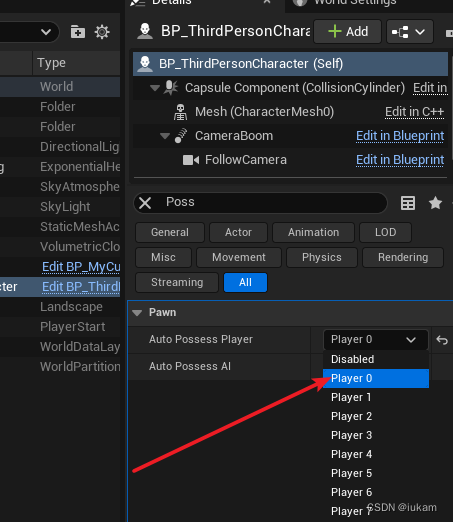
然后,添加第三人称人物,并拖拽到场景中
运行之后,碰到和离开都会打印日志

完整的MyCustomActor脚本
MyCustomActor.h
// Fill out your copyright notice in the Description page of Project Settings.#pragma once#include "CoreMinimal.h"
// 引入组件
#include "Components/SceneComponent.h"
#include "Components/StaticMeshComponent.h"
#include "Components/BoxComponent.h"
#include "Components/AudioComponent.h"
#include "Particles/ParticleSystemComponent.h"
#include "GameFramework/Actor.h"
#include "MyCustomActor.generated.h"UCLASS()
class DEMO_API AMyCustomActor : public AActor
{GENERATED_BODY()public:// Sets default values for this actor's propertiesAMyCustomActor();protected:// Called when the game starts or when spawnedvirtual void BeginPlay() override;public:// Called every framevirtual void Tick(float DeltaTime) override;// 自定义组件UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class USceneComponent *MySceneComponent;UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class UStaticMeshComponent *MyMeshComponent;UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class UBoxComponent *MyBoxComponent;UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class UAudioComponent *MyAudioComponent;UPROPERTY(VisibleAnywhere, BlueprintReadOnly, Category = "MyScene")class UParticleSystemComponent *MyParticleSystemComponent;//声明绑定函数UFUNCTION()void BeginOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex, bool bFromSweep, const FHitResult &SweepResult);UFUNCTION()void EndOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex);
};MyCustomActor.cpp
#include "MyCustomActor.h"// Sets default values
AMyCustomActor::AMyCustomActor()
{// Set this actor to call Tick() every frame. You can turn this off to improve performance if you don't need it.PrimaryActorTick.bCanEverTick = true;// 创建组件MySceneComponent = CreateDefaultSubobject<USceneComponent>(TEXT("CustomScene"));MyMeshComponent = CreateDefaultSubobject<UStaticMeshComponent>(TEXT("CustomStaticMesh"));MyBoxComponent = CreateDefaultSubobject<UBoxComponent>(TEXT("CustomBox"));MyAudioComponent = CreateDefaultSubobject<UAudioComponent>(TEXT("CustomAudio"));MyParticleSystemComponent = CreateDefaultSubobject<UParticleSystemComponent>(TEXT("CustomParticleSystem"));// 把组件添加到根组件RootComponent = MySceneComponent;MyMeshComponent->SetupAttachment(MySceneComponent);MyBoxComponent->SetupAttachment(MySceneComponent);MyAudioComponent->SetupAttachment(MyBoxComponent);MyParticleSystemComponent->SetupAttachment(MySceneComponent);
}// Called when the game starts or when spawned
void AMyCustomActor::BeginPlay()
{Super::BeginPlay();MyBoxComponent->OnComponentBeginOverlap.AddDynamic(this, &AMyCustomActor::BeginOverlapFunction);MyBoxComponent->OnComponentEndOverlap.AddDynamic(this, &AMyCustomActor::EndOverlapFunction);
}// Called every frame
void AMyCustomActor::Tick(float DeltaTime)
{Super::Tick(DeltaTime);
}
void AMyCustomActor::BeginOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex, bool bFromSweep, const FHitResult &SweepResult)
{GEngine->AddOnScreenDebugMessage(-1, 5.f, FColor::Red, FString::Printf(TEXT("BeginOverlapFunction !!")));
}
void AMyCustomActor::EndOverlapFunction(UPrimitiveComponent *OverlappedComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, int32 OtherBodyIndex)
{GEngine->AddOnScreenDebugMessage(-1, 5.f, FColor::Red, FString::Printf(TEXT("EndOverlapFunction !!")));
}
Hit事件的代理绑定
以上面同样的方式创建Hit的绑定实现
UFUNCTION()void HitFunction(UPrimitiveComponent *HitComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, FVector NormalImpulse, const FHitResult &Hit);
void AMyCustomActor::BeginPlay()
{Super::BeginPlay();MyBoxComponent->OnComponentHit.AddDynamic(this, &AMyCustomActor::HitFunction);
}
void AMyCustomActor::HitFunction(UPrimitiveComponent *HitComponent, AActor *OtherActor, UPrimitiveComponent *OtherComp, FVector NormalImpulse, const FHitResult &Hit)
{GEngine->AddOnScreenDebugMessage(-1, 5.f, FColor::Red, FString::Printf(TEXT("HitFunction !!")));
}
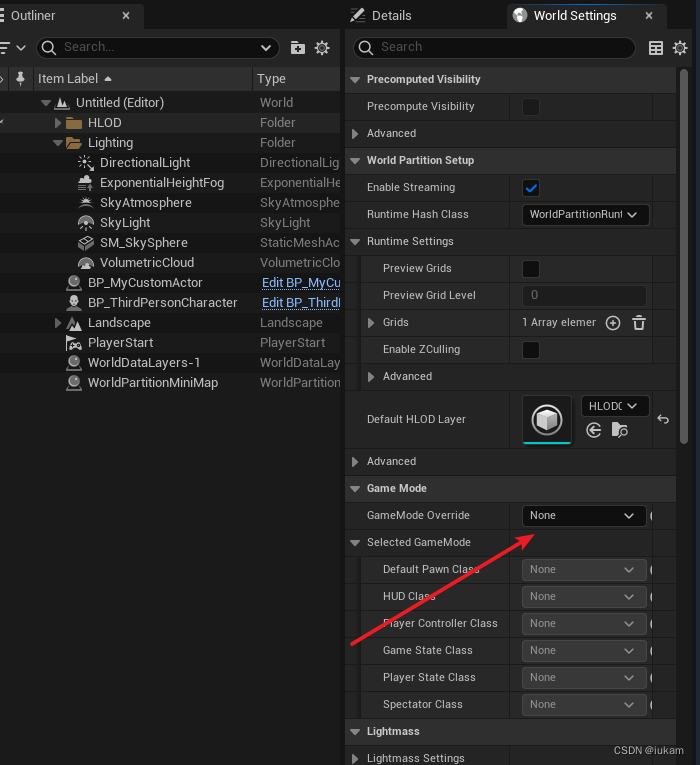
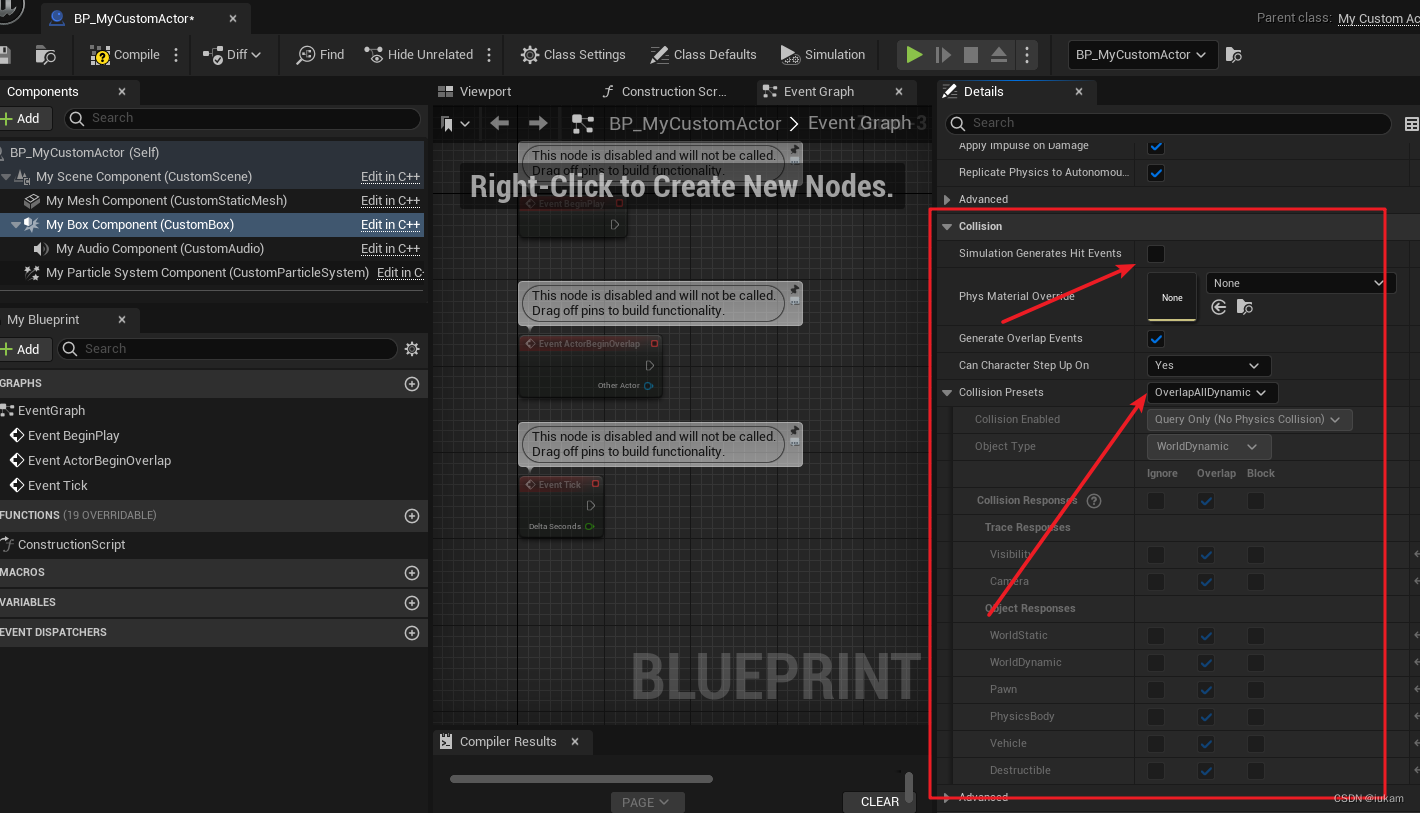
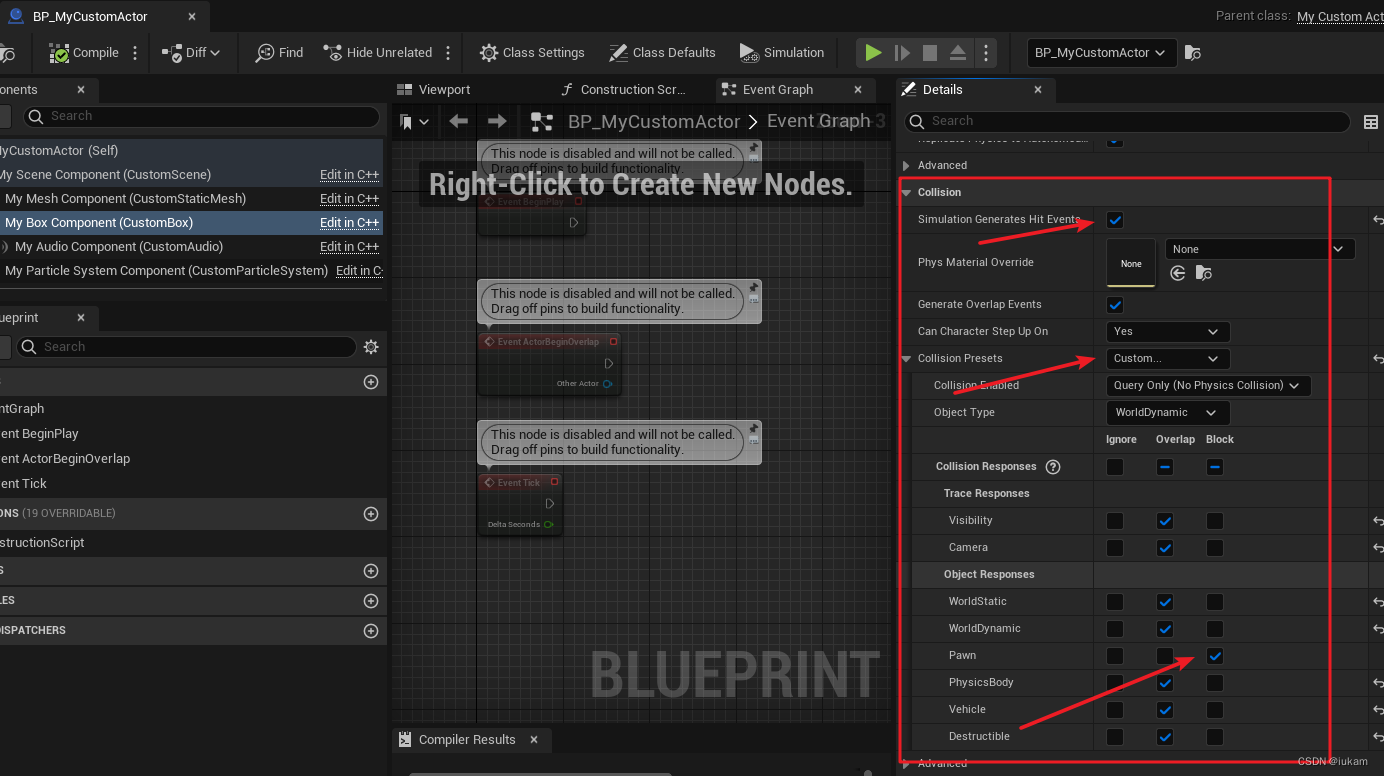
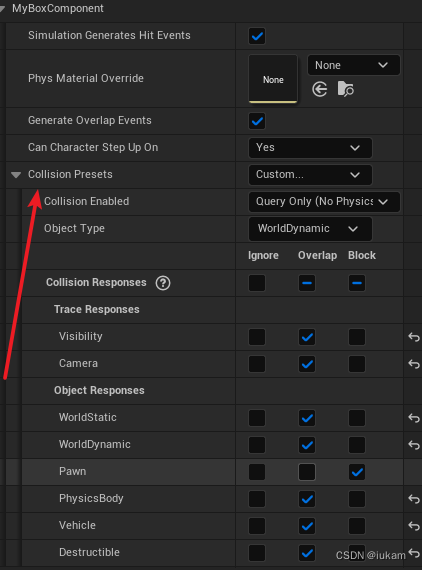
不同的是修改碰撞设置
这个是绑定BeginOverlap和EndOverlap
这个是Hit事件的代理绑定
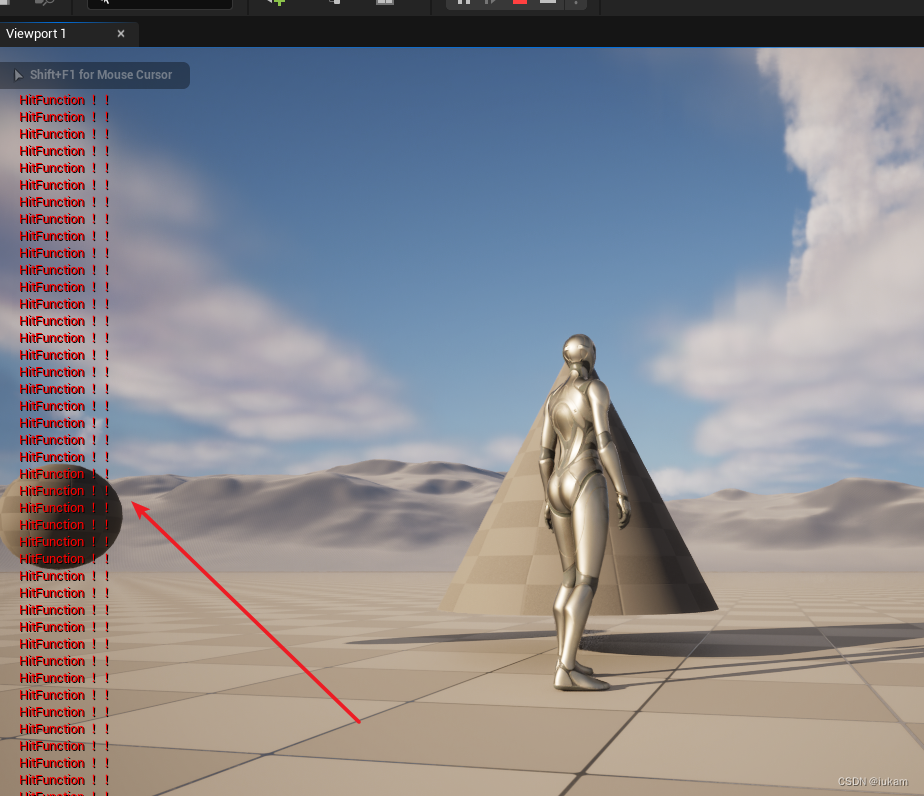
Hit事件的代理绑定之后运行 ,当人物尝试一直前进碰到锥体时会一直触发事件
不像BeginOverlap和EndOverlap只会触发一次
碰撞设置
官网上有相关参考文档
为静态网格体设置碰撞体积
组件和碰撞
在C++脚本中设置
// Sets default values
AMyCustomActor::AMyCustomActor()
{// Set this actor to call Tick() every frame. You can turn this off to improve performance if you don't need it.PrimaryActorTick.bCanEverTick = true;// 创建组件MySceneComponent = CreateDefaultSubobject<USceneComponent>(TEXT("CustomScene"));MyMeshComponent = CreateDefaultSubobject<UStaticMeshComponent>(TEXT("CustomStaticMesh"));MyBoxComponent = CreateDefaultSubobject<UBoxComponent>(TEXT("CustomBox"));MyAudioComponent = CreateDefaultSubobject<UAudioComponent>(TEXT("CustomAudio"));MyParticleSystemComponent = CreateDefaultSubobject<UParticleSystemComponent>(TEXT("CustomParticleSystem"));// 把组件添加到根组件RootComponent = MySceneComponent;MyMeshComponent->SetupAttachment(MySceneComponent);MyBoxComponent->SetupAttachment(MySceneComponent);MyAudioComponent->SetupAttachment(MyBoxComponent);MyParticleSystemComponent->SetupAttachment(MySceneComponent);/****************************** 设置碰撞 ****************************************///碰撞设置MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::NoCollision);MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::QueryOnly);MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::PhysicsOnly);MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::QueryAndPhysics);MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::ProbeOnly);MyBoxComponent->SetCollisionEnabled(ECollisionEnabled::QueryAndProbe);//碰撞对象类型MyBoxComponent->SetCollisionObjectType(ECC_WorldStatic);MyBoxComponent->SetCollisionObjectType(ECC_WorldDynamic);MyBoxComponent->SetCollisionObjectType(ECC_Pawn);MyBoxComponent->SetCollisionObjectType(ECC_PhysicsBody);MyBoxComponent->SetCollisionObjectType(ECC_Vehicle);MyBoxComponent->SetCollisionObjectType(ECC_Destructible);//碰撞响应MyBoxComponent->SetCollisionResponseToAllChannels(ECR_Block);//对所有通道进行设置,响应为Block,阻挡MyBoxComponent->SetCollisionResponseToAllChannels(ECR_Overlap);//对所有通道进行设置,响应为Overlap,重叠MyBoxComponent->SetCollisionResponseToAllChannels(ECR_Ignore);//忽略MyBoxComponent->SetCollisionResponseToChannel(ECC_Pawn,ECR_Overlap);//对单个通道进行响应MyBoxComponent->SetCollisionResponseToChannel(ECC_WorldStatic,ECR_Block);//对单个通道进行响应MyBoxComponent->SetCollisionResponseToChannel(ECC_WorldDynamic,ECR_Ignore);//对单个通道进行响应}
相关文章:
UE5 C++(十一)— 碰撞检测
文章目录 代理绑定BeginOverlap和EndOverlapHit事件的代理绑定碰撞设置 代理绑定BeginOverlap和EndOverlap 首先,创建自定义ActorC类 MyCustomActor 添加碰撞组件 #include "Components/BoxComponent.h"public:UPROPERTY(VisibleAnywhere, BlueprintRea…...

时序数据库InfluxDB、TimeScaleDB简介
一、时序数据库作用、优点 1、作用: 时序数据库通常被用在监控场景,比如运维和 IOT(物联网)领域。这类数据库旨在存储时序数据并实时处理它们。 比如。我们可以写一个程序将服务器上 CPU 的使用情况每隔 10 秒钟向 InfluxDB 中…...

复试 || 就业day05(2024.01.08)项目一
文章目录 前言代码模拟梯度下降构建函数与导函数函数的可视化求这个方程的最小值(直接求导)求方程最小值(不令方程导为0)【梯度下降】eta0.1eta 0.2eta 50eta 0.01画出eta0.1时的梯度下降x的变化过程 总结 前言 💫你…...

基于商品列表的拖拽排序后端实现
目录 一:实现思路 二:实现步骤 二:实现代码 三:注意点 一:实现思路 后台实现拖拽排序通常需要与前端进行配合,对商品的列表拖拽排序,前端需要告诉后端拖拽的元素和拖动的位置。 这里我们假…...
小游戏实战丨基于PyGame的贪吃蛇小游戏
文章目录 写在前面PyGame贪吃蛇注意事项系列文章写在后面 写在前面 本期内容:基于pygame的贪吃蛇小游戏 下载地址:https://download.csdn.net/download/m0_68111267/88700188 实验环境 python3.11及以上pycharmpygame 安装pygame的命令:…...
AOP(面向切面编程)基于XML方式配置
概念解释:(理解基本概念方可快速入手) 连接点(joinpoint) 被拦截到的点,因为Spring只支持方法类型的连接点,所以在Spring中连接点指的就是被拦截到的方法。 切入点(pointcut&#x…...
多线程的概念
多线程 同时执行多个任务,例如一个人一边听歌,一边跳舞 继承Thread类实现多线程的方式 定义一个MyThread类继承Thread类,重写里面的run方法 package com.itxs.demo01;/*** Classname : MyThread* Description : TODO 自定义线程继承Thread类*…...
DeepPurpose 生物化学深度学习库;蛋白靶点小分子药物对接亲和力预测虚拟筛选
参考: https://blog.csdn.net/c9Yv2cf9I06K2A9E/article/details/107649770 https://github.com/kexinhuang12345/DeepPurpose ##安装 pip install DeepPurpose rdkitDeepPurpose包括: 数据: 关联TDC库下载,是同一作者开发的 https://blog.csdn.net/weixin_42357472/artic…...

Java实现责任链模式
责任链模式是一种设计模式,用于处理请求的解耦。在责任链模式中,多个对象都有机会处理请求,从而避免了请求发送者和接收者之间的直接依赖关系。每个处理者都可以决定是否处理请求以及将请求传递给下一个处理者。 简介 责任链模式由一条链组…...
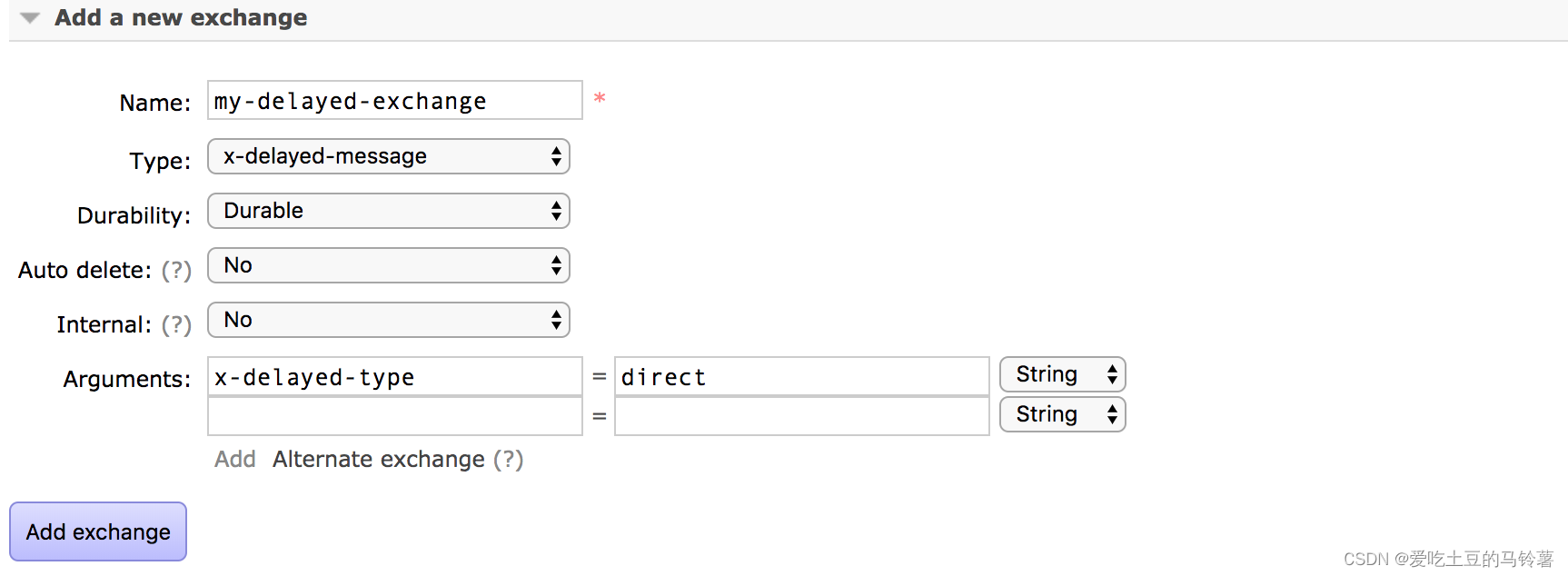
rabbitmq延时队列相关配置
确保 RabbitMQ 的延时消息插件已经安装和启用。你可以通过执行以下命令来安装该插件: rabbitmq-plugins enable rabbitmq_delayed_message_exchange 如果提示未安装,以下是安装流程: 查看mq版本: 查看自己使用的 MQ(…...
【工具】推荐一个好用的代码画图工具
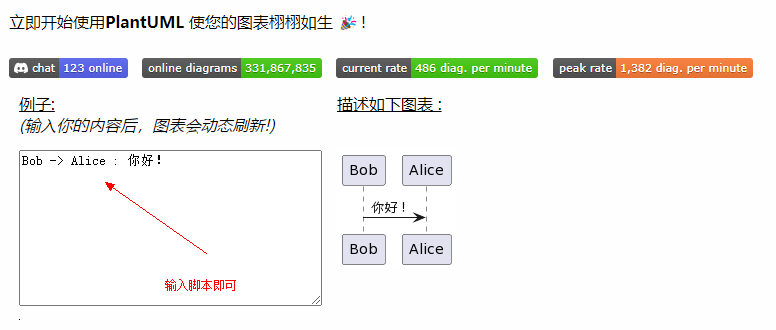
PlantUML 官网地址:https://plantuml.com/zh/ 跳转 支持各种结构化数据画图支持代码调用jar包生成图片 提供在线画图能力 https://www.plantuml.com/plantuml/uml/SyfFKj2rKt3CoKnELR1Io4ZDoSa70000 有兴趣可以尝试下 over~~...
)
Leetcode14-判断句子是否为全字母句(1832)
1、题目 全字母句 指包含英语字母表中每个字母至少一次的句子。 给你一个仅由小写英文字母组成的字符串 sentence ,请你判断 sentence 是否为 全字母句 。 如果是,返回 true ;否则,返回 false 。 示例 1: 输入&am…...

HTTP和TCP代理原理及实现,主要是理解
Web 代理是一种存在于网络中间的实体,提供各式各样的功能。现代网络系统中,Web 代理无处不在。我之前有关 HTTP 的博文中,多次提到了代理对 HTTP 请求及响应的影响。今天这篇文章,我打算谈谈 HTTP 代理本身的一些原理,…...

MySQL中的连接池
数据库的连接池 1 )概述 网站连接数据库,为庞大用户的每次请求创建一个连接是不合适的关闭并重新连接的成本是很大的处理方法:设置最大值, 最小值, 设置最多闲置连接,设置等待阻塞 2 )示例演示 import threading i…...

css计时器 animation实现计时器延时器
css计时器 animation实现计时器延时器 缺点当切页面导航会休眠不执行 最初需求是一个列表每个项目都有各自的失效时间 然后就想到 计时器延时器轮询等方案 这些方案每一个都要有自己的计时器 感觉不是很好 轮询也占资源 然后突发奇想 css能不能实现 开始想到的是transition测…...
【win11 绕过TPM CPU硬件限制安装】
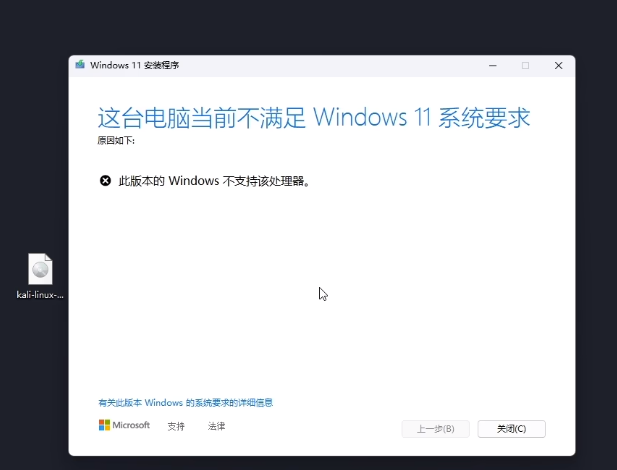
Qt编程指南 VX:hao541022348 ■ 下载iso文件■ 右键文件点击装载出现如下问题■ 绕过TPM CPU硬件限制安装方法■ 虚拟机安装win11 ■ 下载iso文件 选择Windows11 (multi-edition ISO)在选择中文 ■ 右键文件点击装载出现如下问题 ■ 绕过T…...
)
k8s的yaml文件中的kind类型都有哪些?(清单版本)
在操作kubernetes的过程中,我们接触到的yaml文件中的kind类型有很多。他们代表了kubernetes的不同类型的对象,了解了kind的类型,也就相当于了解了k8s都有哪些类型的对象。 类型清单及概要说明 序号类型简述1Pod一个Kubernetes中最基本的资源…...

Jetpack Room使用
Room使用 回顾 数据库有多张表,一张表只能记录一种Class,Class的具体属性是这个表的列;所有对表的操作都要通过Dao来访问 注解说明: Enity 作用于Class上,表示创建一张表记录该Class,Class内部属性使用…...
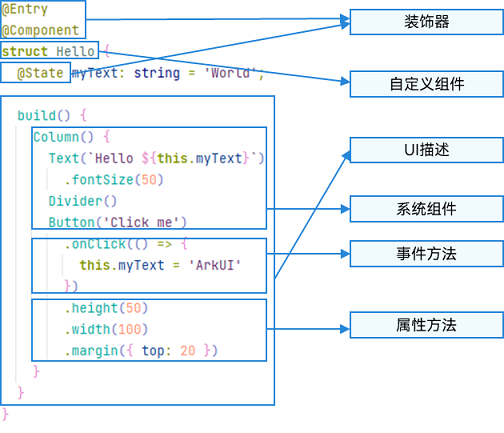
HarmonyOS应用开发之ArkTS语言学习记录
1、ArkTS介绍 ArkTS是鸿蒙生态的应用开发语言。它在保持TypeScript(简称TS)基本语法风格的基础上,对TS的动态类型特性施加更严格的约束,引入静态类型。同时,提供了声明式UI、状态管理等相应的能力,让开发者…...

windows 下 mongodb6.0 导入导出json文件
1.运行cmd窗口,进入MongoDB安装路径下的bin文件下,输入以下命令导入数据文件 mongoimport --host 127.0.0.1 --port 27017 --db <数据库名称,根据自个情况> -c <集合名称,自定义> --file <导入文件的路径名> …...

从“狗的信”看FPGA设计:工程师的幽默隐喻与EDA实践
1. 从一封“狗的信”到工程师的幽默与哲思那天在EE Times上翻到一篇2011年的老文章,标题是《‘Dear God…’ (From the Dog)》,作者是Clive Maxfield。说实话,在一堆充斥着“3nm工艺”、“HBM4 PHY”、“AI Agent”这些硬核技术词汇的行业新闻…...

Nuxt UI规则引擎:声明式动态表单与组件状态管理实践
1. 项目概述:一个为Nuxt UI量身定制的规则引擎最近在捣鼓一个基于Nuxt 3和Nuxt UI的项目,遇到了一个挺典型的场景:页面上有一堆表单控件,它们的显示、禁用状态、甚至校验规则,都不是静态的,而是需要根据其他…...

大模型赛道岗位大揭秘:小白也能轻松入行的5大方向!
文章详细介绍了大模型相关岗位的五大类,包括基座模型岗(理论派、工程派、能力派)、应用算法岗、大模型开发/Agent工程师、AI Infra工程师以及大模型数据工程师。文章强调了应用算法岗更注重项目经验和工程能力,而大模型开发岗则涉…...
)
基于微信小程序的家政服务预约系统(30291)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...

让Linux桌面工作流更高效:Sticky便签应用深度解析
让Linux桌面工作流更高效:Sticky便签应用深度解析 【免费下载链接】sticky A sticky notes app for the linux desktop 项目地址: https://gitcode.com/gh_mirrors/stic/sticky 在Linux桌面环境中,快速记录和访问临时信息是每个用户都会遇到的日常…...

内存数据库eXtremeDB核心技术解析与实践指南
1. 内存数据库技术概述在传统数据库系统中,磁盘I/O往往是性能瓶颈所在。每次数据查询都需要从磁盘读取数据到内存缓冲区,这个过程中涉及机械寻道、旋转延迟等物理限制。而内存数据库(IMDS)通过直接在内存中存储和处理数据,彻底绕过了这个瓶颈…...

Bonsai工具库:函数式编程与代码设计模式实战解析
1. 项目概述:当代码遇见禅意最近在GitHub上闲逛,发现一个挺有意思的项目,叫sauravpanda/bonsai。光看名字,你可能以为这是个园艺或者艺术相关的仓库,但实际上,它是一个非常精巧的编程工具库。这个项目名“B…...

终极指南:如何用sndcpy将Android音频无损转发到电脑
终极指南:如何用sndcpy将Android音频无损转发到电脑 【免费下载链接】sndcpy Android audio forwarding PoC (scrcpy, but for audio) 项目地址: https://gitcode.com/gh_mirrors/sn/sndcpy 你是否曾经想在电脑上收听手机上的音乐、播客或游戏音频࿱…...

终极指南:NoSQL数据库大全awesome-bigdata - 文档型数据库实战入门 [特殊字符]
终极指南:NoSQL数据库大全awesome-bigdata - 文档型数据库实战入门 🚀 【免费下载链接】awesome-bigdata A curated list of awesome big data frameworks, ressources and other awesomeness. 项目地址: https://gitcode.com/gh_mirrors/aw/awesome-b…...

Qt 委托模式实战:QItemDelegate 赋能 QTableView 单元格交互控件
1. 为什么需要委托模式 在Qt开发中,表格视图(QTableView)是最常用的数据展示控件之一。但很多开发者都遇到过这样的困扰:当我们需要在表格单元格中嵌入交互控件时,直接调用setIndexWidget方法会导致控件始终显示,不仅影响界面美观…...