Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 Vins-Fuison 运行配置
一、PX4飞控EKF配置
PX4默认使用的EKF配置为融合GPS的水平位置与气压计高度。如果我们想使用视觉定位,就需要把修改配置文件。让EKF融合来自mavros/vision_pose/pose的数据
1.1修改rcS配置文件
gedit ~/PX4_Firmware/ROMFS/px4fmu_common/init.d-posix/rcS通过注释来修改不同的参数
# GPS used#param set EKF2_AID_MASK 1# Vision used and GPS deniedparam set EKF2_AID_MASK 24# Barometer used for hight measurement#param set EKF2_HGT_MODE 0# Barometer denied and vision used for hight measurementparam set EKF2_HGT_MODE 31.2删除参数文件
重启仿真前,需要删除上一次记录在虚拟eeprom中的参数文件,否则仿真程序会读取该参数文件,导致本次rcS的修改不能生效
rm ~/.ros/eeprom/parameters*
rm -rf ~/.ros/sitl*二、编译VINS-Fusion
2.1安装ceres
安装依赖:
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libgtest-dev
下载编译ceres1.14.0
wget ceres-solver.org/ceres-solver-1.14.0.tar.gz
tar -zxvf ceres-solver-1.14.0.tar.gz
cd ceres-solver-1.14.0/
mkdir build
cd build/
cmake ..
make
sudo make install2.2编译vins-fusion
cp -r ~/XTDrone/sensing/slam/vio/VINS-Fusion ~/catkin_ws/src/
mkdir ~/catkin_ws/scripts/
cp ~/XTDrone/sensing/slam/vio/xtdrone_run_vio.sh ~/catkin_ws/scripts/
cd ~/catkin_ws
catkin build三、启动仿真
3.1 打开仿真环境
roslaunch px4 indoor1.launch3.2运行vins-fusion
cd ~/catkin_ws
bash scripts/xtdrone_run_vio.sh3.3修改话题
由于VINS-Fusion发布的是Odometry类型的话题,我们要将其对应转为PX4所需的话题
cd ~/XTDrone/sensing/slam/vio
python vins_transfer.py iris 03.4建立通信
然后建立通信,键盘控制起飞即可
cd ~/XTDrone/communication
python multirotor_communication.py iris 0 cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py iris 1 vel效果:
相关文章:

Ubunutu18.04 ROS melodic 无人机 XTDrone PX4 Vins-Fuison 运行配置
一、PX4飞控EKF配置 PX4默认使用的EKF配置为融合GPS的水平位置与气压计高度。如果我们想使用视觉定位,就需要把修改配置文件。让EKF融合来自mavros/vision_pose/pose的数据 1.1修改rcS配置文件 gedit ~/PX4_Firmware/ROMFS/px4fmu_common/init.d-posix/rcS 通过注…...

Linux 常见服务配置
笔记所以内容很多,建议选择性看看 SSH Secure Shell 用于与服务器建立安全的连接 对应服务 sshd 注意:配置文件 配制文件修改需要重启或重载sshd服务才能生效 systemctl sshd reload # 重载 sshd 配置文件 systemctl sshd restart # 重启 ssh…...

Flutter基础
一、关键字 class:用于定义一个新的类; extends: 用于指定一个类继承另一个类; mixin: 用于将一个类的代码片段添加到另一个类中,实现代码复用; abstract: 用于声明一个抽象类或抽象方法,不能直接实例化&a…...
MySQL-数据库概述
数据库相关概念: 数据库(DateBase)简称DB,就是一个存储数据的仓库,数据有组织的进行存储。 数据库分为关系型数据库简称RDBMS和非关系型数据库 关系型数据库简称RDBMS:建立在关系模型的基础上,由多张相互连接的二维表组成的数据库.简单来说…...

HTML---JQurey的基本使用
文章目录 前言一、pandas是什么?二、使用步骤 1.引入库2.读入数据总结 本章目标 (1)能够搭建jQuery开发环境 (2)使用ready( )方法加载页面、掌握jQuery语法 使用addClass( )方法和css( )方法为元素添加CSS样式使用n…...

搜索docker镜像
要查看Docker镜像库,可以使用docker search命令。 docker search <关键词>例如,如果你想要查找名为nginx的镜像,可以执行以下命令: docker search nginx命令执行后,将会列出所有与关键词nginx相关的Docker镜像…...
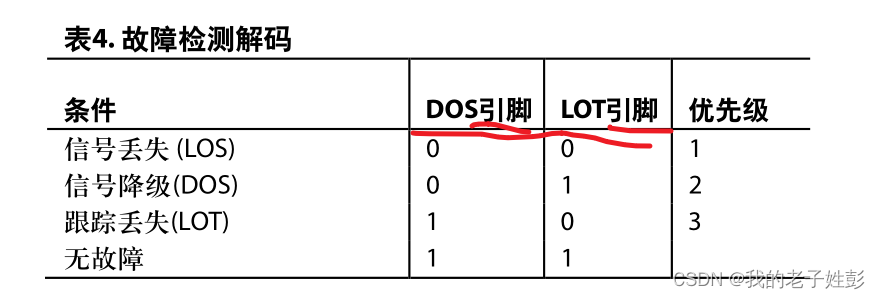
旋变检测AD2s1205手册学习笔记
旋变故障检测故障表 信号丢失检测 检测原理:任一旋变输入(正弦或余弦)降至指定的LOS正弦/余弦阈值 以下时,器件会检测到信号丢失(LOS)。AD2S1205通过将 监视信号与固定最小值进行比较检测此点 丢失的效果表现:LOS由DOS和LOT引脚均闩锁为逻辑…...

【温故而知新】JavaScript的防抖与节流
一、概念 JavaScript中的防抖(debounce)和节流(throttle)是用于控制函数执行频率的技术。 防抖:当一个事件连续触发时,防抖技术将只执行最后一次触发事件的函数调用。换句话说,只有在停止触发…...
C++模板——(3)类模板
归纳编程学习的感悟, 记录奋斗路上的点滴, 希望能帮到一样刻苦的你! 如有不足欢迎指正! 共同学习交流! 🌎欢迎各位→点赞 👍 收藏⭐ 留言📝 勤奋,机会,乐观…...

深度学习中Epoch和Batch Size的关系
在深度学习中,Epoch(周期)和 Batch Size(批大小)是训练神经网络时经常使用的两个重要的超参数。它们之间的关系是通过以下方式连接的: Epoch(周期): Epoch 表示整个训练…...

Python采集微博评论做词云图
嗨喽~大家好呀,这里是魔王呐 ❤ ~! python更多源码/资料/解答/教程等 点击此处跳转文末名片免费获取 环境使用: Python 3.10 Pycharm 第三方模块使用: import requests >>> pip install requests import wordcloud >>> pip install wordclou…...

一文详解VScode 的远程开发
VS code登录服务器后进行编码和调试,VS code上的所有功能都可以使用,和在本地开发基本无区别。 一、配置免密远程登录 因为是要远程登录,那么需要通过使用ssh进行密钥对登录,这样每次登录服务器就可以不用输入密码了。 先来一句官…...
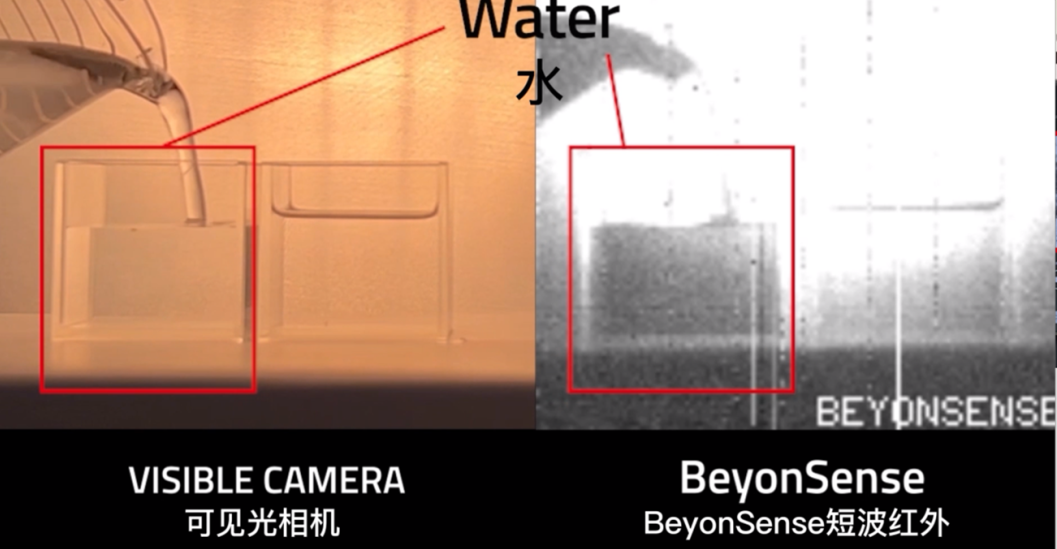
捕捉“五彩斑斓的黑”:锗基短波红外相机的多种成像应用
红外处于人眼可观察范围以外,为我们了解未知领域提供了新的途径。红外又可以根据波段范围,分为短波红外、中波红外与长波红外。较短的SWIR波长——大约900nm-1700nm——与可见光范围内的光子表现相似。虽然在SWIR中目标的光谱含量不同,但所产…...

解读 Sobit v2:铭文资产跨链更注重安全、易用性
铭文市场的发展正在从早期的“无序”进入到“有序”阶段,我们看到从 12 月份以来,比特币生态内的多个应用纷纷宣布获得融资。这表明,目前仍旧有大量的资金有意向铭文领域,同样铭文赛道新一轮浪潮或许正在酝酿。 另一方面ÿ…...

[开源]万界星空开源MES系统,支持低代码大屏设计
一、开源系统概述: 万界星空科技免费MES、开源MES、商业开源MES、商业开源低代码MES、市面上最好的开源MES、MES源代码、免费MES、免费智能制造系统、免费排产系统、免费排班系统、免费质检系统、免费生产计划系统、精美的数据大屏。 二、开源协议: 使…...

开源软件运维安全防护的六个手段
开源,顾名思义,即开放软件源代码。代码贡献者可将自己编写的程序提交到开源社区的公开平台上,其他代码开发者如有类似的功能需求可以不必再自己动脑动手编写代码,而是直接集成、修改或应用贡献者公开的代码。 开源软件是通过特定…...

开启Android学习之旅-5-Activity全屏
Android 两种方式设置全屏: 1. 第一行代码中的方法 通过 getWindow().getDecorView()方法拿到当前Activity的DecorView,再调用 setSystemUiVisibility() 方法来改变系统UI的显示,这里传入了 View.SYSTEM_UI_FLAG_LAYOUT_FULLSCREEN 和 View.SYSTEM_UI_…...
)
运行时类型信息 typeid、type_info...(C++)
4.5 运行时类型信息4.5.1 typeid和type_info4.5.2 dynamic_cast 4.5 运行时类型信息 运行时类型信息(Run-time Type Information,RTTI)提供了在程序运行时刻确定对象类型的方法,是面向对象程序语言为解决多态问题而引入的一种语言特性。由于…...
等级考试试卷(七级)解析)
2023-12-02 青少年软件编程(C语言)等级考试试卷(七级)解析
2023-12-02 青少年软件编程(C语言)等级考试试卷(七级)解析 一、编程题(共4题,共100分)T1. 迷宫 一天Extense在森林里探险的时候不小心走入了一个迷宫,迷宫可以看成是由n * n的格点组成,每个格点只有2种状态,.和#,前者表示可以通行后者表示不能通行。同时当Extense…...
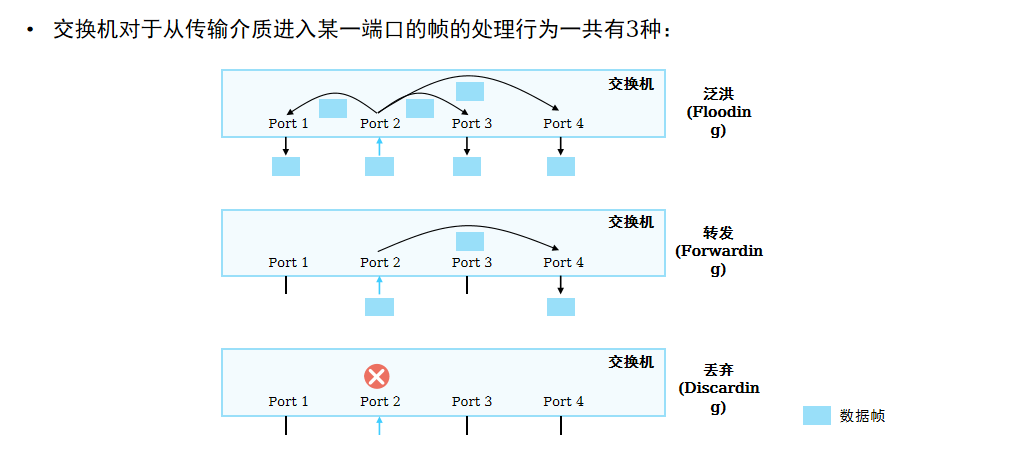
计算机网络-以太网交换基础
一、网络设备的演变 最初的网络在两台设备间使用传输介质如网线等进行连接就可以进行通信。但是随着数据的传输需求,多个设备需要进行数据通信时就需要另外的设备进行网络互联,并且随着网络传输的需求不断更新升级。从一开始的两台设备互联到企业部门内部…...

PheroPath:自定义代谢通路构建与可视化工具在组学数据分析中的应用
1. 项目概述与核心价值最近在生物信息学和计算生物学领域,一个名为“PheroPath”的项目引起了我的注意。这个项目由用户starpig1129托管,从名字上就能嗅到一丝“信息素”和“路径”结合的味道。作为一名长期在组学数据分析、特别是代谢通路研究一线摸爬滚…...

TigerVNC终极指南:快速掌握跨平台远程桌面控制
TigerVNC终极指南:快速掌握跨平台远程桌面控制 【免费下载链接】tigervnc High performance, multi-platform VNC client and server 项目地址: https://gitcode.com/gh_mirrors/ti/tigervnc TigerVNC是一款高性能、跨平台的VNC客户端和服务器软件࿰…...

微创式电子设备设计:从自动化到自主化的智能革命
1. 项目概述:从“工具”到“魔法”的隐形革命十几年前,我在《EE Times》上读到一篇由西蒙巴克(Simon Barker)撰写的文章,标题是一个直击灵魂的提问:“微创式电子设备在哪里?” 这个问题像一颗种…...

Windows 11任务栏拖放功能终极修复指南:3步恢复高效操作体验
Windows 11任务栏拖放功能终极修复指南:3步恢复高效操作体验 【免费下载链接】Windows11DragAndDropToTaskbarFix "Windows 11 Drag & Drop to the Taskbar (Fix)" fixes the missing "Drag & Drop to the Taskbar" support in Windows…...

4. 打破ASR技术瓶颈:Whisper-1模型原理、性能与落地实践
1. 引言 语音识别(Automatic Speech Recognition, ASR)是人工智能领域的核心技术方向之一,其历史可追溯至20世纪50年代贝尔实验室的Audrey系统——这一仅能识别10个英文数字的早期系统,标志着机器理解人类语音的开端。此后半个多…...
)
思科路由器远程管理保姆级教程:从IP配置到Telnet/SSH登录全流程(避坑line vty和密码设置)
思科路由器远程管理全流程实战指南:从基础配置到安全登录 刚接触思科设备时,最让人头疼的莫过于那一连串看似晦涩的命令行操作。记得我第一次尝试配置路由器远程访问时,明明按照教程一步步操作,却始终无法通过Telnet连接ÿ…...

大模型风口已至:月薪30K+的AI Agent开发岗,你准备好了吗?
文章介绍了如何借助不同版本的Agents实现智能自动化,并详细描述了AI应用工程师和大模型算法工程师的岗位职责和任职要求。文章还强调了AI学习的重要性,指出最先掌握AI的人将具有竞争优势,并提供了大模型AI学习和面试资料,帮助读者…...

Taotoken提供的官方价折扣与活动对于项目原型的成本友好度
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken提供的官方价折扣与活动对于项目原型的成本友好度 对于启动新项目或开发原型的开发者而言,早期试错成本是需要…...

告别模拟开关:用TLC7528双DAC为你的STM32项目扩展模拟输出通道
告别模拟开关:用TLC7528双DAC为你的STM32项目扩展模拟输出通道 在嵌入式系统开发中,模拟信号输出是许多控制系统的核心需求。无论是精密仪器、工业自动化还是音频处理,都需要稳定可靠的模拟输出通道。然而,大多数STM32微控制器内置…...

Nevis‘22基准:评估持续学习模型的计算效率与知识迁移能力
1. 项目概述:为什么我们需要一个全新的终身学习基准?在计算机视觉乃至整个机器学习领域,我们正面临一个日益尖锐的矛盾:一方面,我们希望模型能够像人类一样,在漫长的时间里持续学习新知识,不断进…...