雷达信号处理——恒虚警检测(CFAR)
雷达信号处理的流程
雷达信号处理的一般流程:ADC数据——1D-FFT——2D-FFT——CFAR检测——测距、测速、测角。
雷达目标检测
首先要搞清楚什么是检测,检测就是判断有无。雷达在探测的时候,会出现很多峰值,这些峰值有可能是目标、噪声和干扰,那么就需要进行一种判决,来决定它是否属于目标。
雷达目标检测问题是利用信号的统计特性和噪声的统计特性解决在受噪声干扰的观测中,信号有无的判决问题。其数学基础就是统计判决理论,又称假设检验理论。假设检验是进行统计判决的重要工具,信号检测相当于数理统计中的假设检验。
恒虚警检测概念
假设就是检验对象的可能情况或状态。对于雷达检测来说,可以选用两个假设,即目标存在或不存在。用 H 0 H_0 H0和 H 1 H_1 H1分别表示接收机的无信号输入和有信号输入的假设,用 D 0 D_0 D0和 D 1 D_1 D1和分别表示检测器作出无信号和有信号的判决结果。于是接收机的输入与检测器的判决将有四种情况:
(1) H 0 H_0 H0为真,判为 D 0 D_0 D0,即接收机无信号输入, 检测器判为无信号, 其概率称为正确不发现概率 P a n P_{an} Pan;
(2) H 0 H_0 H0为真, 判为 D 1 D_1 D1, 即接收机无信号输入, 检测器判为有信号, 其概率称为虚警概率 P f a P_{fa} Pfa;
(3) H 1 H_1 H1为真, 判为 D 0 D_0 D0,即接收机有信号输入, 检测器判为无信号, 其概率称为漏警概率 P l a P_{la} Pla;
(4) H 1 H_1 H1为真, 判为 D 1 D_1 D1,即接收机有信号输入, 检测器判为有信号, 其概率称为正确检测概率 P d P_{d} Pd;
我们希望的是正确不发现概率 P a n P_{an} Pan和真确检测概率 P d P_{d} Pd越高越好,而虚警概率 P f a P_{fa} Pfa和漏警概率 P l a P_{la} Pla越低越好。
恒虚警检测,又称CFAR,全称是Constant False Alarm Rate Detector,是雷达目标检测的一种常见的手段。CFAR检测算法属于信号检测中的自动检测算法,在雷达信号处理中主要应用的有四种,即CA-CFAR、SO-CFAR、GO-CFAR、WCA-CFAR。
恒虚警检测算法
首先,指定一个距离多普勒单元,称为检测单元(CUT, cell under test),为了判断检测单元处是否存在目标,需要设定一个阈值 T T T,当检测单元处的检测值 Y Y Y大于 T T T时,判断为有目标,否则判断为没有目标:
d ( Y ) = { 有目标, Y ≥ T 无目标, Y < T . d(Y)= \left\{ \begin{array}{ll} 有目标,Y\geq T\\ 无目标,Y< T. \end{array} \right. d(Y)={有目标,Y≥T无目标,Y<T.
具体的做法是先在测试单元的周围放置保护单元,以消除信号在测试单元周围的多余能量,然后再保护单元的周围选择参考单元:

上图展示的是同时在距离维和多普勒维进行恒虚警检测的原理,如果只是在距离维或多普勒维做CFAR,检测单元的左右两侧均有设定好数量的保护单元和参考单元。
恒虚警检测选择均值类自适应门限 CFAR 检测技术,其中单元平均方式(CA-CFAR)、两侧单元平均 选大方式(GO-CFAR)、两侧单元平均选小方式 (SO-CFAR) 三种方法在主瓣多目标的背景下,检测性能都有所下降,容易出现漏警和漏检小信号源。单限切除恒虚警概率方法
(E-CFAR),在主瓣多目标的背景下,具有较好的检 测性能。E-CFAR 方法是在进行单元平均之前设置切 除上限,切除信号的强分量,从而避免对小信号源 漏检,防止对信源数目的估计出现偏差。
如果是CA-CFAR,则取左右两边的参考单元的均值再取平均值,然后与 α \alpha α相乘( α \alpha α计算公式如下方公式),再将结果与阈值相比较。如果大于阈值则代表有目标,否则认为无目标。

从上图可以看到,由于待检单元左侧还有几个单元,所以做完恒虚警检测之后会使得序列变短,这个和深度学习中的卷积类似。要想使得不变短的话可以采取补零法或者翻转法来实现。
从图中也可以看到,根据阈值的选择不同,有不同的检测器,其中CA-CFAR是取的参考单元的均值,SO-CFAR取的是参考单元的最小值,而GO-CFAR是取的参考单元的最大值。
其中最重要的是门限因子 α \alpha α的计算方法:
α = N ( P f a − 1 N − 1 ) \alpha = N(P_{fa}^{-\frac{1}{N}}-1) α=N(Pfa−N1−1)
恒虚警检测matlab编程
不同的CFAR检测器适用于不同的场景,CA-CFAR算法适用于均匀环境中的单目标或彼此相距较远的多目标环境,在邻近多目标环境会发生目标的遮蔽效应,在杂波边缘会发生杂波边缘效应。
下面是不进行补零操作的CA-CFAR的程序:
function [position, threshold, start_cell, stop_cell] = cacfar(signal, Pfa, ref_num, guard_num)
% ======>INPUT:
% signal: Data of signal(include signal and noise).[DATATYPE: row vector]
% Pfa: Probability of false alarm.[DATATYPE: scalar]
% ref_num: Number of reference cell.[DATATYPE: scalar]
% guard_num: Number of guard cell.[DATATYPE: scalar]
% ======>OUTPUT:
% position: positions of target.[DATATYPE: row vector]
% threshold: CFAR threshold of input signal.[DATATYPE: row vector]
position = [];
left_num = guard_num + ref_num;
start_cell = left_num + 1;
stop_cell = length(signal) - left_num;
N = 2*ref_num;
alpha = N * (Pfa ^ (-1/N) - 1);
threshold = zeros(1, stop_cell - start_cell + 1);
for ii = start_cell : stop_celltmp_data = [signal(ii-left_num : ii-guard_num-1), ...signal(ii+guard_num+1 : ii+left_num)];mean(tmp_data);tmp = mean(tmp_data) * alpha;% threshold(ii - left_num)tmp;threshold(ii - left_num) = tmp;if tmp < signal(ii)position = [position, ii];end
end
return
下面是进行补零操作的CA-CFAR的程序:
function [position, threshold] = MYCACFAR(signal, Pfa, ref_num, guard_num)
% 该函数用于进行CA-FAR恒虚警检测,在信号首位两端进行补零,使得输出的阈值序列和信号长度一致
% ======>INPUT:
% signal: Data of signal(include signal and noise).[DATATYPE: row vector]
% Pfa: Probability of false alarm.[DATATYPE: scalar]
% ref_num: Number of reference cell.[DATATYPE: scalar]
% guard_num: Number of guard cell.[DATATYPE: scalar]
% ======>OUTPUT:
% position: positions of target.[DATATYPE: row vector]
% threshold: CFAR threshold of input signal.[DATATYPE: row vector]
position = []; %存储高于检测门限的信号区域的位置
left_num = guard_num + ref_num; %检测单元两边的单元数
sigLen = length(signal); %信号长度
tempSig = zeros(1,sigLen+2*left_num); %补零后的信号向量
tempSig((left_num + 1) :(sigLen + left_num)) = signal; %对中间部分进行信号的赋值,首位两端各有left_num个零值
N = 2*ref_num; %参考单元总数
alpha = N * (Pfa ^ (-1/N) - 1); %门限因子,横虚警概率越小,参考单元数越多,因子越大,检测阈值也越大
threshold = zeros(1, sigLen); %用于储存检测阈值
for ii = 1 : 1 :sigLencentNum = ii+left_num; %对应的检测单元下标tmp_data = [tempSig((centNum-left_num):(centNum-guard_num-1)), ...tempSig((centNum+guard_num+1):(centNum+left_num))]; %取检测单元的值tmp = mean(tmp_data) * alpha; %与门限因子相乘得到检测阈值threshold(ii) = tmp; %进行存储if tmp < signal(ii) %阈值小于信号position = [position, ii]; %存储被检测到的下标end
end
return
下面是进行翻转补充首位的操作的CA-CFAR的程序:
function [position, threshold] = MYCACFAR2(signal, Pfa, ref_num, guard_num)
% 该函数用于进行CA-FAR恒虚警检测,在信号首位两端进行翻转,使得输出的阈值序列和信号长度一致
% ======>INPUT:
% signal: Data of signal(include signal and noise).[DATATYPE: row vector]
% Pfa: Probability of false alarm.[DATATYPE: scalar]
% ref_num: Number of reference cell.[DATATYPE: scalar]
% guard_num: Number of guard cell.[DATATYPE: scalar]
% ======>OUTPUT:
% position: positions of target.[DATATYPE: row vector]
% threshold: CFAR threshold of input signal.[DATATYPE: row vector]
position = []; %存储高于检测门限的信号区域的位置
left_num = guard_num + ref_num; %检测单元两边的单元数
sigLen = length(signal); %信号长度
tempSig = zeros(1,sigLen+2*left_num); %补零后的信号向量
tempSig(1:left_num) = signal(1:left_num);
tempSig(sigLen + left_num+1:end) = signal(sigLen-left_num+1:end);
tempSig((left_num + 1) :(sigLen + left_num)) = signal; %对中间部分进行信号的赋值,首位两端各有left_num个零值
N = 2*ref_num; %参考单元总数
alpha = N * (Pfa ^ (-1/N) - 1); %门限因子,横虚警概率越小,参考单元数越多,因子越大,检测阈值也越大
threshold = zeros(1, sigLen); %用于储存检测阈值
for ii = 1 : 1 :sigLencentNum = ii+left_num; %对应的检测单元下标tmp_data = [tempSig((centNum-left_num):(centNum-guard_num-1)), ...tempSig((centNum+guard_num+1):(centNum+left_num))]; %取检测单元的值tmp = mean(tmp_data) * alpha; %与门限因子相乘得到检测阈值threshold(ii) = tmp; %进行存储if tmp < signal(ii) %阈值小于信号position = [position, ii]; %存储被检测到的下标end
end
return
下面是仿真结果:

对目标峰值部分局部放大后

附录
二维CFAR 仿真代码地址:https://github.com/tooth2/2D-CFAR
相关文章:
雷达信号处理——恒虚警检测(CFAR)
雷达信号处理的流程 雷达信号处理的一般流程:ADC数据——1D-FFT——2D-FFT——CFAR检测——测距、测速、测角。 雷达目标检测 首先要搞清楚什么是检测,检测就是判断有无。雷达在探测的时候,会出现很多峰值,这些峰值有可能是目标…...
)
k8s的yaml文件中的kind类型都有哪些?(详述版Part1/2)
目录 综述 分块详述 1、Pod 2、Deployment 3、Service 4、DaemonSet 5、ReplicaSet 6、ServiceAccount 7、PodDisruptionBudget 8、PersistentVolumeClaim 9、PersistentVolume 10、Job 11、CronJob 12、StatefulSet 综述 通过yaml文件中的kind可以大致了解kube…...

企业培训系统源码:构建智能、可扩展的学习平台
企业培训系统在现代企业中扮演着至关重要的角色。本文将通过深度解析企业培训系统的源码,介绍如何构建一个智能、可扩展的学习平台,涉及关键技术和代码实例。 1. 技术栈选择与项目初始化 在构建企业培训系统之前,选择适当的技术栈是至关重…...
设计模式—行为型模式之状态模式
设计模式—行为型模式之状态模式 状态(State)模式:对有状态的对象,把复杂的“判断逻辑”提取到不同的状态对象中,允许状态对象在其内部状态发生改变时改变其行为。 状态模式包含以下主要角色: 环境类&am…...
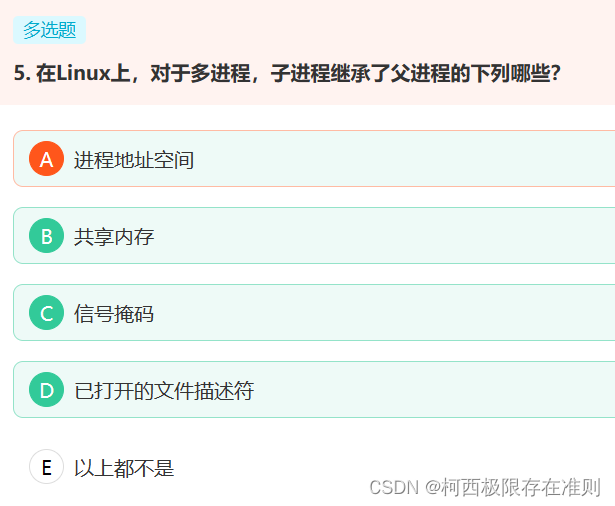
Linux习题3
解析: grep:查找文件内的内容 gzip:压缩文件,文件经压缩后会增加 gz:扩展名 find:在指定目录下查找文件 解析: A hosts文件是Linux系统上一个负责ip地址与域名快速解析的文件,以…...

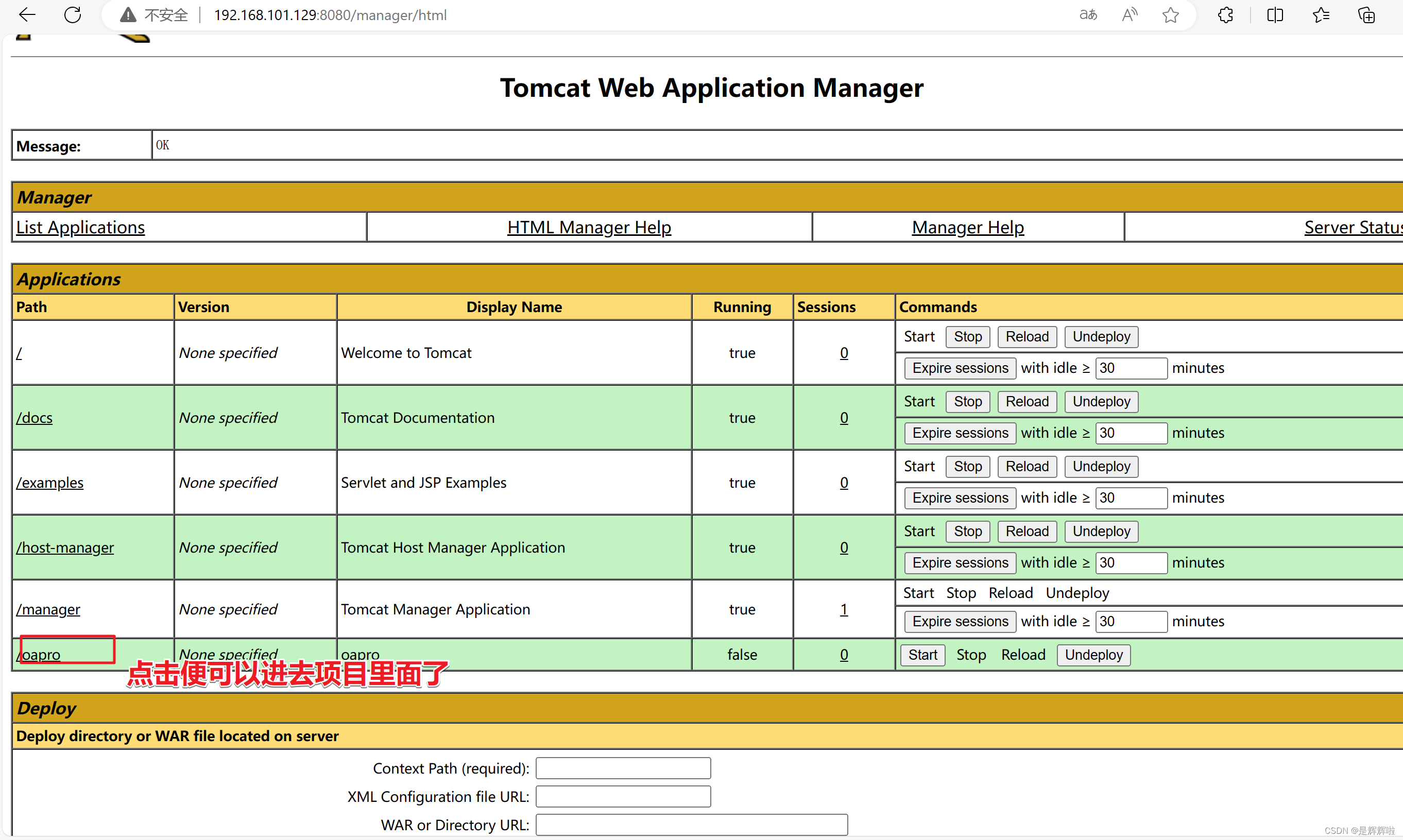
SpringBoot+策略模式实现多种文件存储模式
一、策略模式 背景 针对某种业务可能存在多种实现方式;传统方式是通过传统if…else…或者switch代码判断; 弊端: 代码可读性差扩展性差难以维护 策略模式简介 策略模式是一种行为型模式,它将对象和行为分开,将行…...
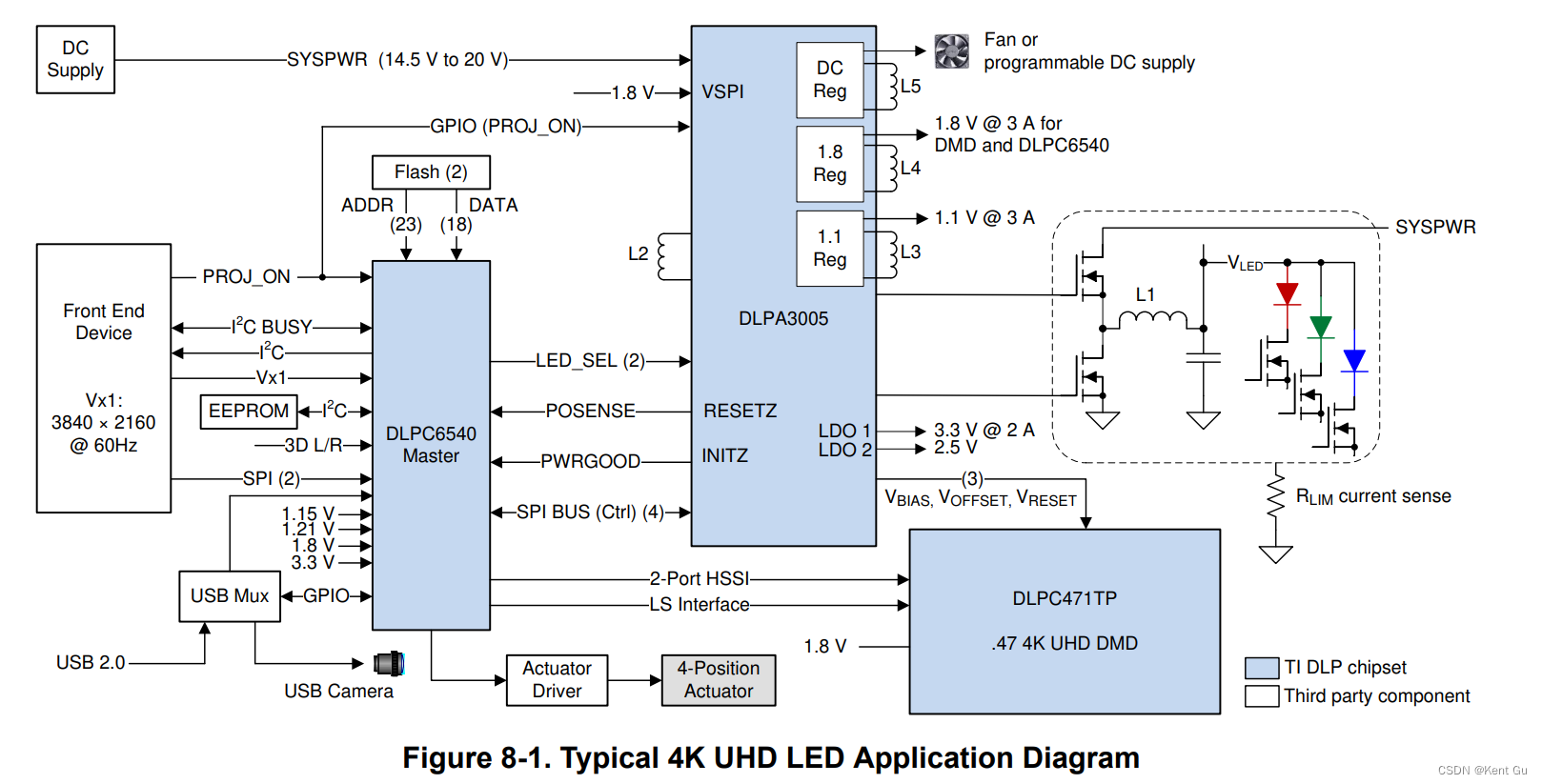
细说DMD芯片信号-DLP3
1, Block diagram 2. 信号介绍 2.1, LS interface: LD_Data_P/N(i), LD_CLK_P/N(i), LS_RDATA_A_BIST(O) 2.2, 视频信号: HSSI(High speed serial interface) High speed Differential Data pair lan A0~7 P/N, High speed Differential Clock A High…...

MySQL从0到1全教程【1】MySQL数据库的基本概念以及MySQL8.0版本的部署
1 MySQL数据库的相关概念 1.1 数据库中的专业术语 1.1.1 数据库 (DB) 数据库是指:保存有组织的数据的容器(通常是一个文数据库 (database)件或一组文件)。 1.1.2 数据库管理系统 (DBMS) 数据库管理系统(DBMS)又称为数据库软件(产品),用于管理DB中的数据 注意:…...

grep常用命令
1. grep常用参数 -i忽略大小写-w精准匹配整词-v结果取反(匹配指定的字符串以外的内容)-A关键字所在行的后几行也一起显示-B关键字所在行的前几行也一起显示-C关键字所在行的前后几行行一起显示 2. 常用命令 2.1 从文件中查找关键词 # 精准匹配 grep linux test.txt# 从多个…...

Spring Data JPA 使用总结
本文记录了Spring data JPA 的一些细碎的规则。 findBy语法规则 :findOOXXByName 实际上等价 > findByName 比如: User findFirstByOrderByLastnameAsc();User findTopByOrderByAgeDesc();Page<User> queryFirst10ByLastname(String lastname, Pageable pageable);…...

融云 CEO 董晗荣获 51CTO 「2023 年度科技影响力人物奖」
(👆点击获取《社交泛娱乐出海作战地图》) 1 月 5 日,由知名 IT 技术媒体 51CTO 主办的第十八届“中国企业年终评选”正式揭晓榜单,融云 CEO 董晗荣获“2023 年度科技影响力人物奖”。关注【融云全球互联网通信云】了解…...

数据洞察力,驱动企业财务变革
我们不得不面对一个现实,就是数据量的剧增。加上大部分企业并不愿意删除历史数据,以防未来预测分析时需要,这造成数据就像一个雪球,越滚越大。然而,过多的数据和数据不足一样会成为企业发展和理解分析的障碍。从海量数…...

Postgresql常见(花式)操作完全示例
案例说明 将Excel数据导入Postgresql,并实现常见统计(数据示例如下) 导入Excel数据到数据库 使用Navicat工具连接数据库,使用导入功能可直接导入,此处不做过多介绍,详细操作请看下图: 点击“下…...
【Docker】数据管理
🥳🥳Welcome 的Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于Docker的相关操作吧 目录 🥳🥳Welcome 的Huihuis Code World ! !🥳🥳 前言 一.数据卷 示例演示 示例剖析…...
认识异常及异常处理机制之try-catch
异常类 什么是异常?就像人会犯错一样,程序在运行的过程中也会犯错。程序中的错误有两类,一类称为Error(错误),另一类称为Exception(异常)。Error类和Exception类都为Throwable的子类…...

html学习之路:简述html文档头部 <meta> 的 http-equiv 属性
🧋当输入网址打开网页时,设置html头部meta的http-equiv属性,可以帮助浏览器更加精确和正常却的显示网页内容,比如设置网页多久自动刷新,设置网页在浏览器缓存中的时限,设置多少事件跳转到指定的网页地址&am…...
逆矩阵计算
目录 一、逆矩阵的定义 核心:AB BA E 1)定义 2)注意 3)逆矩阵存在的条件|A| ! 0 二、核心公式: 三、求逆矩阵(核心考点) 1、伴随矩阵法 2、初等变换法(重点掌握ÿ…...
《豫鄂烽火燎原大小焕岭》:一部穿越时空的历史史诗
《豫鄂烽火燎原大小焕岭》:一部穿越时空的历史史诗 一部赓续红色血脉的生动教材 一部讴歌时代英雄和人民精神宝典 当历史的烽烟渐渐远去,留下的是一页页泛黄的记忆和无数英雄的壮丽诗篇。李传铭的力作《豫鄂烽火燎原大小焕岭》正是这样一部深情的回望&am…...

浅研究下 DHCP 和 chrony
服务程序: 1.如果有默认配置,请先备份,再进行修改 2.修改完配置文件,请重启服务或重新加载配置文件,否则不生效 有些软件,安装包的名字和系统里服务程序的名字不一样(安装包名字:…...
【算法】动态中位数(对顶堆)
题目 依次读入一个整数序列,每当已经读入的整数个数为奇数时,输出已读入的整数构成的序列的中位数。 输入格式 第一行输入一个整数 P,代表后面数据集的个数,接下来若干行输入各个数据集。 每个数据集的第一行首先输入一个代表…...
基于Particle Photon与NeoPixel的物联网徽章:实时追踪ISS空间站
1. 项目概述:一个会“感知”太空的智能徽章 如果你和我一样,对头顶那片星空充满好奇,特别是当得知国际空间站(ISS)这个重达数百吨的大家伙,其实每天都会数次悄无声息地掠过我们的城市上空时,总…...
)
紧急更新!Midjourney刚推送的--stylize 1000级调优补丁,已实测提升立体主义结构清晰度达4.8倍(附对比数据集下载)
更多请点击: https://intelliparadigm.com 第一章:Midjourney立体主义风格的本质解构 立体主义并非简单地将物体“打碎再拼合”,而是一种对多维时空感知的视觉转译——Midjourney 通过其隐式扩散先验,以概率化方式重构了布拉克与…...

智能跨平台文件同步革命:OpenMTP让Mac与Android无缝连接
智能跨平台文件同步革命:OpenMTP让Mac与Android无缝连接 【免费下载链接】openmtp OpenMTP - Advanced Android File Transfer Application for macOS 项目地址: https://gitcode.com/gh_mirrors/op/openmtp 你是否曾经为Mac和Android设备之间的文件传输而烦…...

2026杭州本地GEO优化公司排名,优质机构一站式推荐
AI 搜索时代,不少杭州企业踩过这样的坑:花大价钱找服务商做 GEO 优化,每天产出大量文章,结果在豆包、DeepSeek 等 AI 大模型里搜不到品牌信息,询盘没涨、获客成本反倒飙升。GEO 优化从来不是 “堆文章”,而…...

解密Jsxer:如何高效反编译Adobe JSXBIN二进制脚本
解密Jsxer:如何高效反编译Adobe JSXBIN二进制脚本 【免费下载链接】jsxer A fast and accurate JSXBIN decompiler. 项目地址: https://gitcode.com/gh_mirrors/js/jsxer Jsxer是一个快速准确的JSXBIN反编译器,专门用于将Adobe ExtendScript的二进…...

保姆级教程:在OBS Studio里开启H.264帧内刷新,解决录屏文件体积暴增问题
保姆级教程:在OBS Studio里开启H.264帧内刷新,解决录屏文件体积暴增问题 你是否遇到过这样的困扰:用OBS Studio录制静态界面(比如文档、代码编辑器)时,明明画面几乎没有变化,生成的视频文件却像…...

解放你的文档下载焦虑:一键保存30+平台内容的神器
解放你的文档下载焦虑:一键保存30平台内容的神器 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是为了解决您…...

在STM32F103上用FreeRTOS模拟I2C,为什么我劝你放弃硬件I2C?
为什么在STM32F103上使用FreeRTOS时,模拟I2C比硬件I2C更靠谱? 如果你正在使用STM32F103开发项目,并且需要在FreeRTOS环境下实现I2C通信,那么这篇文章可能会改变你的技术选型决策。很多开发者初次接触STM32时,都会优先考…...

AI应用统一管理:aiclublight轻量级启动器部署与配置指南
1. 项目概述与核心价值最近在折腾一些AI相关的本地化应用,发现了一个挺有意思的项目,叫aiclublight。这名字听起来有点“俱乐部之光”的意思,但它的核心其实是一个轻量级的AI应用启动器。简单来说,它就像是一个为你电脑上各种AI模…...

从零到一:UniApp CLI 实战入门与避坑指南
1. 为什么需要UniApp CLI? 第一次接触UniApp的开发者可能会疑惑:明明有HBuilderX这样完善的图形化工具,为什么还要学习CLI?这个问题我也曾经纠结过。经过多个项目的实战验证,我发现CLI在以下场景中优势明显:…...