图像中部分RGB矩阵可视化
图像中部分RGB可视化
今天室友有个需求就是模仿下面这张图画个示意图:

大致就是把图像中的一小部分区域的RGB值可视化了一下。他居然不知道该怎么画,我寻思这不直接秒了。
import cv2 as cv
import numpy as np
import matplotlib.pyplot as pltclass Plotter:def __init__(self, img):self.img = imgself.range = None# 三个图的位置self.loc = [[0.01, 0.325, 0.35, 0.35],[0.375, 0.375, 0.25, 0.25],[0.71, 0.355, 0.29, 0.29],]self.dloc = [0.02, 0.02] # 表格间距self.facecolor = plt.get_cmap("Accent")(range(3)) # 表格颜色def plot_img(self, fig):img_range = self.rangeaxes = fig.add_axes(self.loc[0])axes.imshow(self.img, aspect="auto")axes.add_patch(plt.Rectangle((img_range[0], img_range[2]),img_range[1] - img_range[0],img_range[3] - img_range[2],fill=False,edgecolor="red",linewidth=2,))axes.axis("off")def plot_table(self, fig, table):loc = self.loc[2]dloc = self.dlocfacecolor = self.facecolorfor i in range(table.shape[2]):axes = fig.add_axes([loc[0] - dloc[0] * i, loc[1] - dloc[1] * i, loc[2], loc[3]],)axes.table(cellText=table[:, :, i],loc="center",cellColours=np.full((table.shape[0], table.shape[1], 4),facecolor[i],dtype=self.facecolor[0].dtype,),bbox=[0, 0, 1, 1],)axes.axis("off")def plot_range_img(self, fig, range_img):axes = fig.add_axes(self.loc[1])axes.imshow(range_img, aspect="auto")axes.set_xticks([])axes.set_yticks([])spines = ["left", "right", "bottom", "top"]for spine in spines:axes.spines[spine].set_color("r")def plot_path(self, axes, x1, x2):x = np.linspace(x1[0], x2[0], 100)y = np.linspace(x1[1], x2[1], 100)axes.set_xlim(0, 1)axes.set_ylim(0, 1)axes.plot(x, y, "r--")def range_points_on_img(self):img_range = self.rangeloc = self.loc[0]luloc = loc[0] + img_range[0] / self.img.shape[0] * loc[2]# axes坐标系y轴方向相反ldloc = loc[1] + (self.img.shape[1] - img_range[2]) / self.img.shape[1] * loc[3]dx = (img_range[1] - img_range[0]) / self.img.shape[0] * loc[2]dy = (img_range[3] - img_range[2]) / self.img.shape[1] * loc[3]return [(luloc + dx, ldloc - dy), (luloc + dx, ldloc)]def plot_img2range(self, axes):img_points = self.range_points_on_img()range_points = [(self.loc[1][0], self.loc[1][1]),(self.loc[1][0], self.loc[1][1] + self.loc[1][3]),]print(img_points)self.plot_path(axes, img_points[0], range_points[0])self.plot_path(axes, img_points[1], range_points[1])def plot_range2table(self, axes):range_points = [(self.loc[1][0] + self.loc[1][2], self.loc[1][1]),(self.loc[1][0] + self.loc[1][2], self.loc[1][1] + self.loc[1][3]),]table_points = [(self.loc[2][0] - self.dloc[0] * 2, self.loc[2][1] - self.dloc[1] * 2),(self.loc[2][0] - self.dloc[0] * 2,self.loc[2][1] + self.loc[2][3] - self.dloc[1] * 2,),]self.plot_path(axes, range_points[0], table_points[0])self.plot_path(axes, range_points[1], table_points[1])def plot_line(self, fig):axes = fig.add_axes([0, 0, 1, 1])self.plot_img2range(axes)self.plot_range2table(axes)axes.axis("off")def plot(self, img_range):self.range = img_rangerange_img = self.img[img_range[0] : img_range[1], img_range[2] : img_range[3], :]fig = plt.figure()self.plot_img(fig)self.plot_range_img(fig, range_img)self.plot_table(fig, range_img)self.plot_line(fig)plt.show()if __name__ == "__main__":img_path = "lena_color_512.tif"img = cv.imread(img_path, cv.IMREAD_UNCHANGED)img = cv.cvtColor(img, cv.COLOR_BGR2RGB)p = Plotter(img)p.plot([255, 265, 255, 265])其实就是先画三个主图,一个全部的,一个小范围内的,一个RGB值的表,然后画四根线就完事了。效果如下:

唯一要注意的是 Axes 坐标系和图像的坐标系中Y轴是相反的,然后其他 axes.imshow 和 axes.table 都让它填满整个 Axes 就好了,要不然它给你自适应了,不好算几根连线的位置。
这里写的时候没想好,按 copilot 生成的 img_range 形式写下去了,目前是 [x起点,x终点,y起点,y终点] 的格式,换成 [x起点,y起点,x范围,y范围] 会更统一一点。但也懒得改了,一小时的工作时间白嫖室友一顿必胜客,很舒服。
相关文章:
图像中部分RGB矩阵可视化
图像中部分RGB可视化 今天室友有个需求就是模仿下面这张图画个示意图: 大致就是把图像中的一小部分区域的RGB值可视化了一下。他居然不知道该怎么画,我寻思这不直接秒了。 import cv2 as cv import numpy as np import matplotlib.pyplot as pltclass …...

RPA财务机器人在厦门市海沧医院财务管理流程优化汇总的应用
目前国内外研究人员对于RPA机器人在财务管理流程优化领域中的应用研究层出不穷,但现有研究成果主要集中在财务业务单一领域,缺乏财务管理整体流程一体化管控的研究。RPA机器人的功能绝非单一的财务业务处理,无论从自身技术发展,或…...

聚焦老年生活与健康,“老有所依·情暖夕阳”元岗街社区微型养老博览会顺利开展
尊老敬老是中华民族的传统美德, 爱老助老是全社会的共同责任。 家有一老,如有一宝, 长者的生活情况是一个家庭的头等大事, 做好长者服务是街道和社区的重要工作。 2024年1月6日,由元岗街道党工委、元岗街道办事处、…...
记录汇川:H5U与Factory IO测试12
主程序: 子程序: IO映射 子程序: 辅助出料 子程序: 自动程序 Factory IO配置: 实际动作如下: Factory IO测试12...

PingCAP 受邀参加 FICC 2023,获 Open100 世纪全球开源贡献奖
2023 年 12 月,2023 国际测试委员会智能计算与芯片联邦大会(FICC 2023)在海南三亚举办,中外院士和数十位领域专家莅临出席。 大会现场 ,开放源代码促进会创始人 Bruce Perens 颁发了 Open100 世纪全球开源贡献奖&…...

10-skywalking告警
https://github.com/apache/skywalking/blob/master/docs/en/setup/backend/backend-alarm.md 5.1:告警指标 ~$ vim /apps/apache-skywalking-apm-bin/config/oal/core.oal service_resp_time # 服务的响应时间 service_sla # 服务http请求成功率SLV,比…...

vue前端开发自学,插槽练习第二次,name属性的使用
vue前端开发自学,插槽练习第二次,name属性的使用!可以使用name属性,来自定义一个名字,这样,就可以在一个组件内同时出现多个插槽的内容了。在子组件内接收的时候,很简答,只需要在slot标签里面加上name“mz”࿱…...

AI副业拆解:人像卡通化,赋予你的形象全新生命力
大家好我是在看,记录普通人学习探索AI之路。 🔥让你的形象瞬间穿越二次元!🚀人像卡通化,捕捉你的独特魅力,让真实与梦幻在此刻交融。🎨 今天为大家介绍如何免费把人像卡通化--漫画风 https://w…...

宝塔面板安装MySQL8数据库
第一步:搜索mysql 第二步: 点击安装 我这里选择安装8版本 第三步:给宝塔配置mysql防火墙 第四步:修改数据库密码 第五步:想要使用navicat连接 需要修改root的权限 (1)使用secureCRT先登录mysql (2) 输入u…...
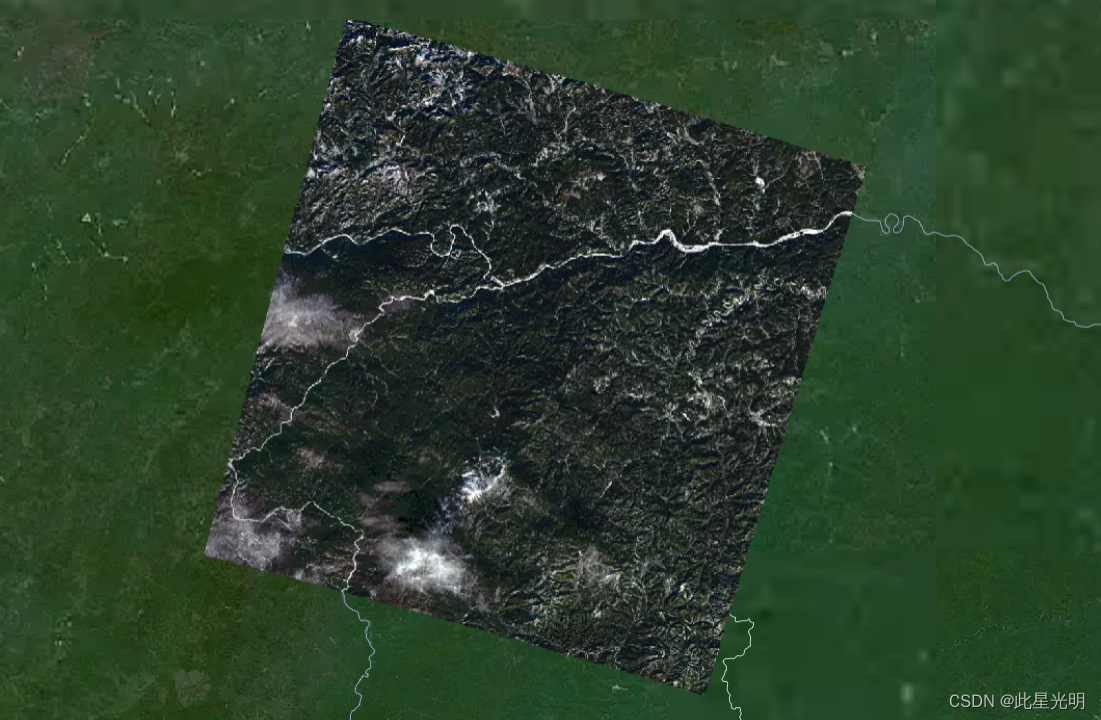
中科星图——Landsat9_C2_SR大气校正后的地表反射率数据
数据名称: Landsat9_C2_SR 数据来源: USGS 时空范围: 2022年1月-2023年3月 空间范围: 全国 数据简介: Landsat9_C2_SR数据集是经大气校正后的地表反射率数据,属于Collection2的二级数据产品&#…...
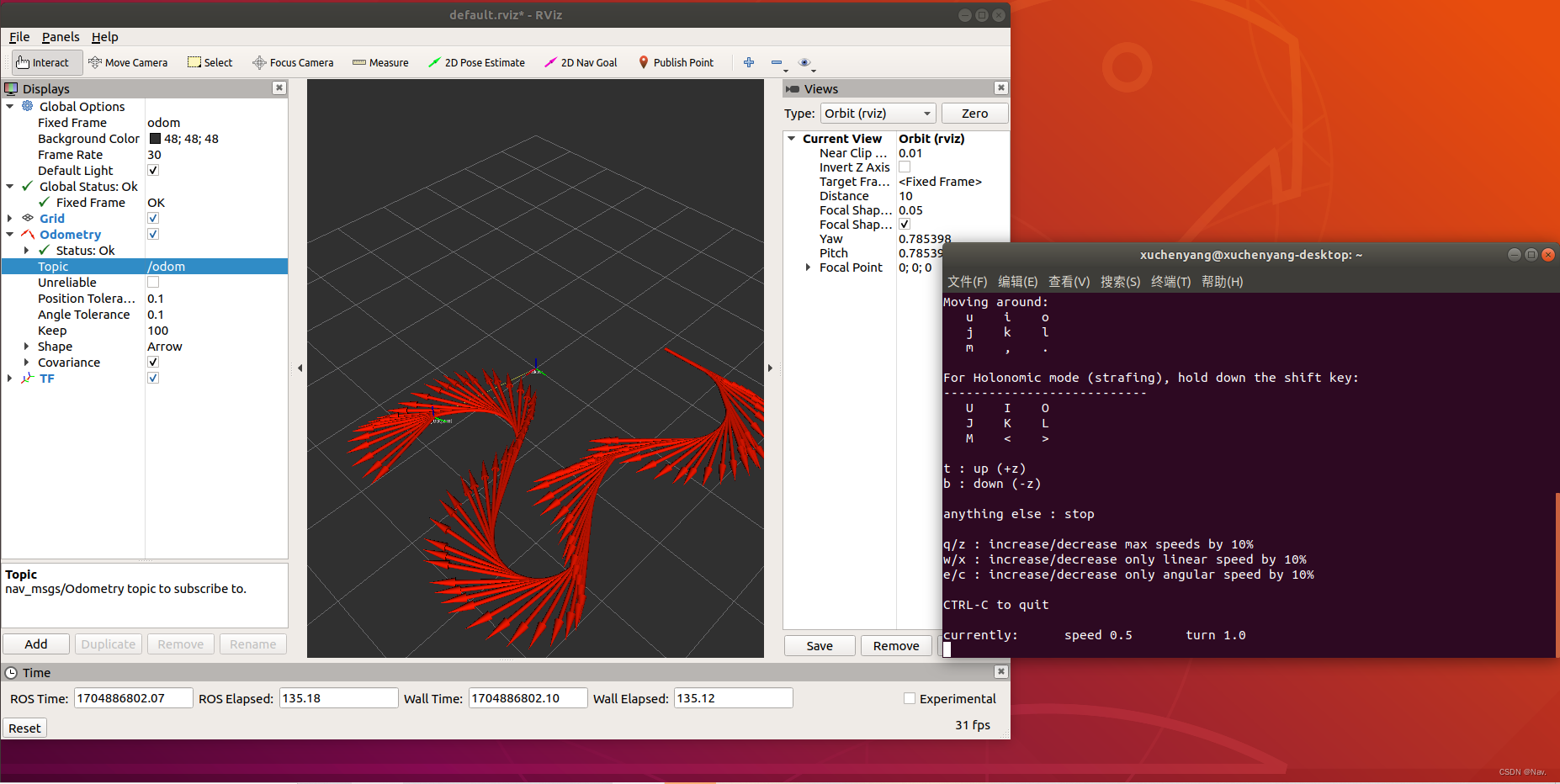
使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘 搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下: 系统准备;下载程序;程序修改;分别启动PC与Jetson…...

Nacos下载与安装【windows】
🥚今日鸡汤🥚 我不知将去何方,但我已经在路上。 ——宫崎骏《千与千寻》 目录 🥞1.Nacosdi地址 🌭2.GitHub下载 🍿3.目录结构 🥓4.启动nacos 🧂5.客户端登陆 🧈…...
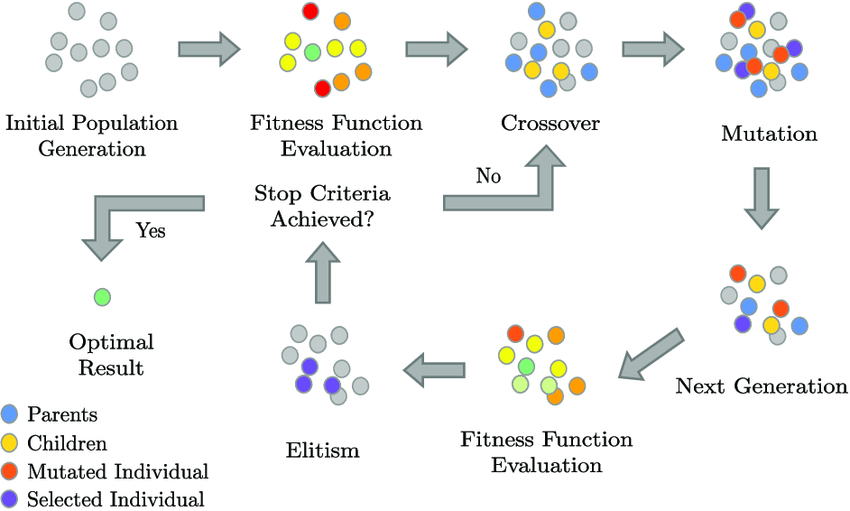
【随笔】遗传算法优化的BP神经网络(随笔,不是很详细)
文章目录 一、算法思想1.1 BP神经网络1.2 遗传算法1.3 遗传算法优化的BP神经网络 二、代码解读2.1 数据预处理2.2 GABP2.3 部分函数说明 一、算法思想 1.1 BP神经网络 BP神经网络(Backpropagation Neural Network,反向传播神经网络)是一种监…...

Mysql 嵌套子查询
文章目录 子查询 大家好!我是夏小花,今天是2024年1月13日|腊月初三 子查询 需求是:最外层的查询语句里面包含四个不相同表的查询,根据月份进行关联查询,每个查询语句中的where条件可以自行去定义,最后返回数量和月份 …...

Qt QLabel标签控件
文章目录 1 属性和方法1.1 文本1.2 对齐方式1.3 换行1.4 图像 2. 实例2.1 布局2.2 为标签添加背景色2.3 为标签添加图片2.4 代码实现 QLabeI是Qt中的标签类,通常用于显示提示性的文本,也可以显示图像 1 属性和方法 QLabel有很多属性,完整的可…...
iOS14 Widget 小组件调研
桌面小组件是iOS14推出的一种新的桌面内容展现形式。 根据苹果的统计数据,“一般用户每天进入主屏幕的次数超过90次”,如果有一个我们应用的小组件在桌面,每天都有超过90次曝光在用户眼前的机会,这绝对是一个顶级的流量入口。 “…...
)
HarmonyOS的应用类型(FA vs Stage)
HarmonyOS目前提供两种应用模型 FA(Feature Ability)模型: HarmonyOS API 7开始支持的模型,已经不再主推。 Stage模型: HarmonyOS API 9开始新增的模型,是目前主推且会长期演进的模型。在该模型中,由于提供了AbilityStage、WindowStage等类作为应用组件和Window窗口的…...

Jeecg创建表单页面步骤
1.在Online表单开发里面新建一个表单页面,可以修改数据库属性、页面属性、校验字段、外键、索引,新建完成之后然后同步数据库 2.选中该表,然后生成代码,可以先把代码放在桌面,然后将文件夹是包名称的文件复制到后端代…...
leetcode17 电话号码的字母组合
方法1 if-else方法 if-else方法的思路及其简单粗暴,如下图所示,以数字234为例,数字2所对应的字母是abc,数字3所对应的是def,数字4所对应的是ghi,最后所产生的结果就类似于我们中学所学过的树状图一样&…...
用html和css实现一个加载页面【究极简单】
要创建一个简单的加载页面,你可以使用 HTML 和 CSS 来设计。以下是一个基本的加载页面示例: HTML 文件 (index.html): <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"…...

BMAD 开发者的日常如果你正在用
BMAD 开发者的日常如果你正在用 BMAD 方法论做开发,这套流程一定很熟悉:/bmad-bmm-create-story 1.1 # 创建故事 /bmad-bmm-dev-story 1.1 # 开发实现 /bmad-bmm-qa-automate 1.1 # 运行测试 /bmad-bmm-code-review 1.1 # 代码审查 # 发现 …...
)
Windows系统管理员必备:LastActivityView详细使用指南(含数据导出技巧)
Windows系统管理员必备:LastActivityView深度实战手册 作为Windows系统管理员,我们常常需要追踪用户活动、排查异常行为或进行合规审计。市面上虽然有不少商业监控工具,但NirSoft出品的LastActivityView以其轻量高效、数据全面且完全免费的特…...

深入RealReachability FSM引擎:有限状态机在iOS网络检测中的终极应用指南
深入RealReachability FSM引擎:有限状态机在iOS网络检测中的终极应用指南 【免费下载链接】RealReachability We need to observe the REAL reachability of network. Thats what RealReachability do. 项目地址: https://gitcode.com/gh_mirrors/re/RealReachabi…...

【苍穹外卖 | 篇⑥】登录流程
在牛某网看见了牛肉哥的帖子之后,打算向牛肉大佬学习,故开始书写CSDN博客,通过博客的方式来巩固自身知识学习。因为之前有粗略的学习了Java Web 的基础课程,所以博客内容主要是巩固之前学习当中的模糊点,以及一些自己认…...

【stm32_2.1】【快速入门】自举模式、Flash闪存、LED点灯——对二极管PN结解析
目录 当前MCU概述 固化程序到单片机 自举模式 自举配置 Flash闪存 二极管的原理 当前MCU概述 MCU名称stm32F407ZET6处理器主频168MHz 闪存容量 512KB静态随机访问存储器SRAM192KBMCU引脚数量144pin 固化程序到单片机 写好的程序要固化到单片机,就必须学习怎…...

产品 SEO 关键词与转化率的关系是什么_如何评估产品 SEO 关键词的价值
<h3 id"seo_seo">产品 SEO 关键词与转化率的关系是什么_如何评估产品 SEO 关键词的价值</h3> <p>在数字营销的世界里,产品 SEO 关键词(Search Engine Optimization,搜索引擎优化)的作用不可忽视。这不…...
)
Python AI部署效能革命(Cuvil编译器内核逆向工程实录)
第一章:Python AI部署效能革命的底层驱动力Python 已成为 AI 模型开发的事实标准,但其在生产环境中的部署效能长期受限于解释执行、全局解释器锁(GIL)及内存管理机制。近年来,一场静默却深刻的效能革命正在重塑 Python…...

AI建站避坑指南:十个高频问题与真相解答
# 痛点共情:用AI建站,最怕遇到哪些“坑”?\很多宣传,心里还是没底。AI建站到底靠不靠谱?会不会做出来的网站千篇一律?万一做了几年,平台跑路了怎么办?我的客户数据安不安全ÿ…...

HackRF玩家必备:PortaPack H2固件刷写与Mayhem固件配置全攻略
HackRF玩家进阶指南:PortaPack H2固件刷写与Mayhem实战配置 无线电爱好者们对HackRF的探索从未停止,而PortaPack H2扩展板的出现让这款开源SDR设备真正实现了"口袋实验室"的愿景。不同于市面上简单的使用说明,本文将带你深入理解Po…...

从立创EDA到Cadence Allegro:封装转换的完整指南
1. 为什么需要封装转换? 最近在帮朋友做一个硬件项目,发现他用立创EDA设计的电路板需要转到Cadence Allegro平台生产。这就像两个说不同语言的人要合作,必须找个翻译——封装转换就是这个翻译过程。立创EDA和Allegro虽然都是PCB设计工具&…...