使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘
搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下:
- 系统准备;
- 下载程序;
- 程序修改;
- 分别启动PC与Jetson nano端相关节点,并实现运动控制。
1 系统准备
ros_arduino_bridge是依赖于python-serial功能包的,需要在Jetson nano端安装该功能包,安装命令:
sudo apt-get install python-serial
2 下载程序
使用git命令从仓库中下载程序。
https://gitee.com/xu783462354/ros_arduino_bridge.git
3 程序修改
ros_arduino_bridge的ROS端功能包主要是使用 ros_arduino_python,程序入口是该包launch目录下的arduino.launch文件,内容如下:
<launch><node name="arduino" pkg="ros_arduino_python" type="arduino_node.py" output="screen"><rosparam file="$(find ros_arduino_python)/config/my_arduino_params.yaml" command="load" /></node>
</launch>
需要载入yaml格式的配置文件,该文件在 config 目录下已经提供了模板,只需要复制文件并按需配置即可,复制文件并重命名,配置如下:
# For a direct USB cable connection, the port name is typically
# /dev/ttyACM# where is # is a number such as 0, 1, 2, etc
# For a wireless connection like XBee, the port is typically
# /dev/ttyUSB# where # is a number such as 0, 1, 2, etc.port: /dev/ttyUSB0
baud: 57600
timeout: 0.1rate: 50
sensorstate_rate: 10use_base_controller: True
base_controller_rate: 10# For a robot that uses base_footprint, change base_frame to base_footprint
base_frame: base_footprint# === Robot drivetrain parameters
wheel_diameter: 0.065
wheel_track: 0.155
encoder_resolution: 1560 # from Pololu for 131:1 motors
#gear_reduction: 1.0
#motors_reversed: True# === PID parameters
Kp: 2
Kd: 15
Ki: 0
Ko: 50
accel_limit: 1.0# === Sensor definitions. Examples only - edit for your robot.
# Sensor type can be one of the follow (case sensitive!):
# * Ping
# * GP2D12
# * Analog
# * Digital
# * PololuMotorCurrent
# * PhidgetsVoltage
# * PhidgetsCurrent (20 Amp, DC)sensors: {#motor_current_left: {pin: 0, type: PololuMotorCurrent, rate: 5},#motor_current_right: {pin: 1, type: PololuMotorCurrent, rate: 5},#ir_front_center: {pin: 2, type: GP2D12, rate: 10},#sonar_front_center: {pin: 5, type: Ping, rate: 10},arduino_led: {pin: 13, type: Digital, rate: 5, direction: output}
}
4 测试
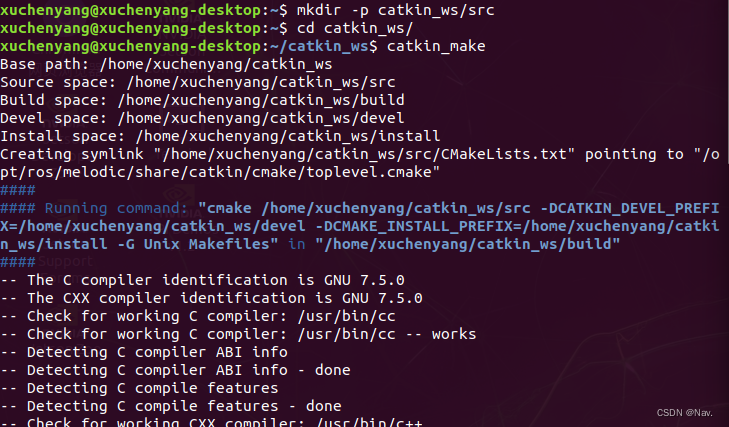
- 创建工作空间,并进入工作空间编译。
mkdir -p catkin_ws/src
cd ./catkin_ws
catkin_make
- 将ros_arduino_bridge程序放入src目录中。
- 再次进行编译。
catkin_make
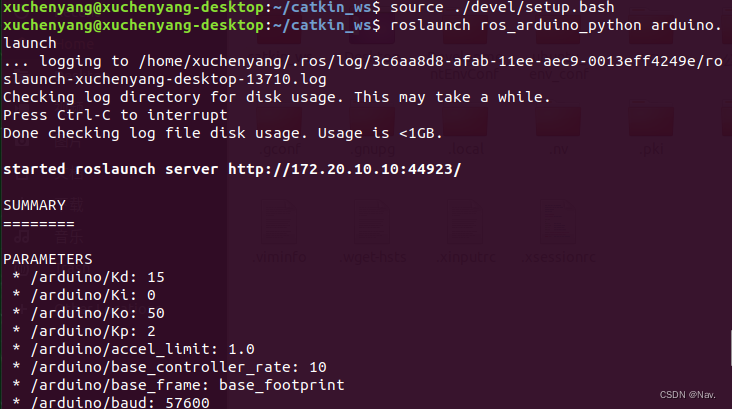
- 在Jetson nano端启动 ros_arduino_bridge 节点。
-
刷新环境变量,运行ros节点
-
发现错误,需要添加权限
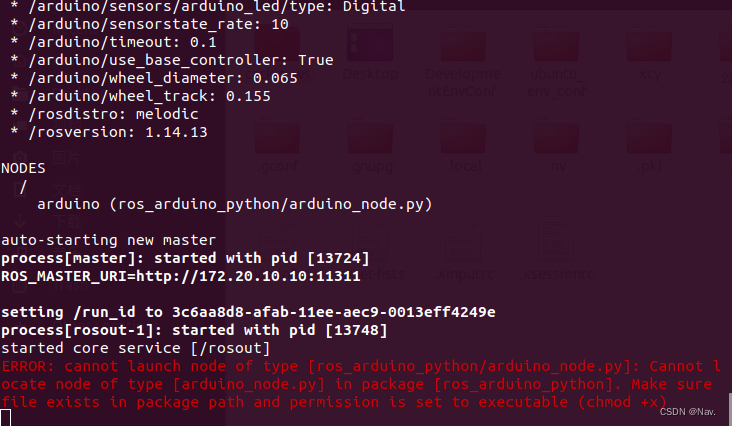
进入catkin_ws/src/ros_arduino_bridge/ros_arduino_python/nodes,为文件添加权限。
chmod +x ./*
- 运行ros_arduino_bridge节点
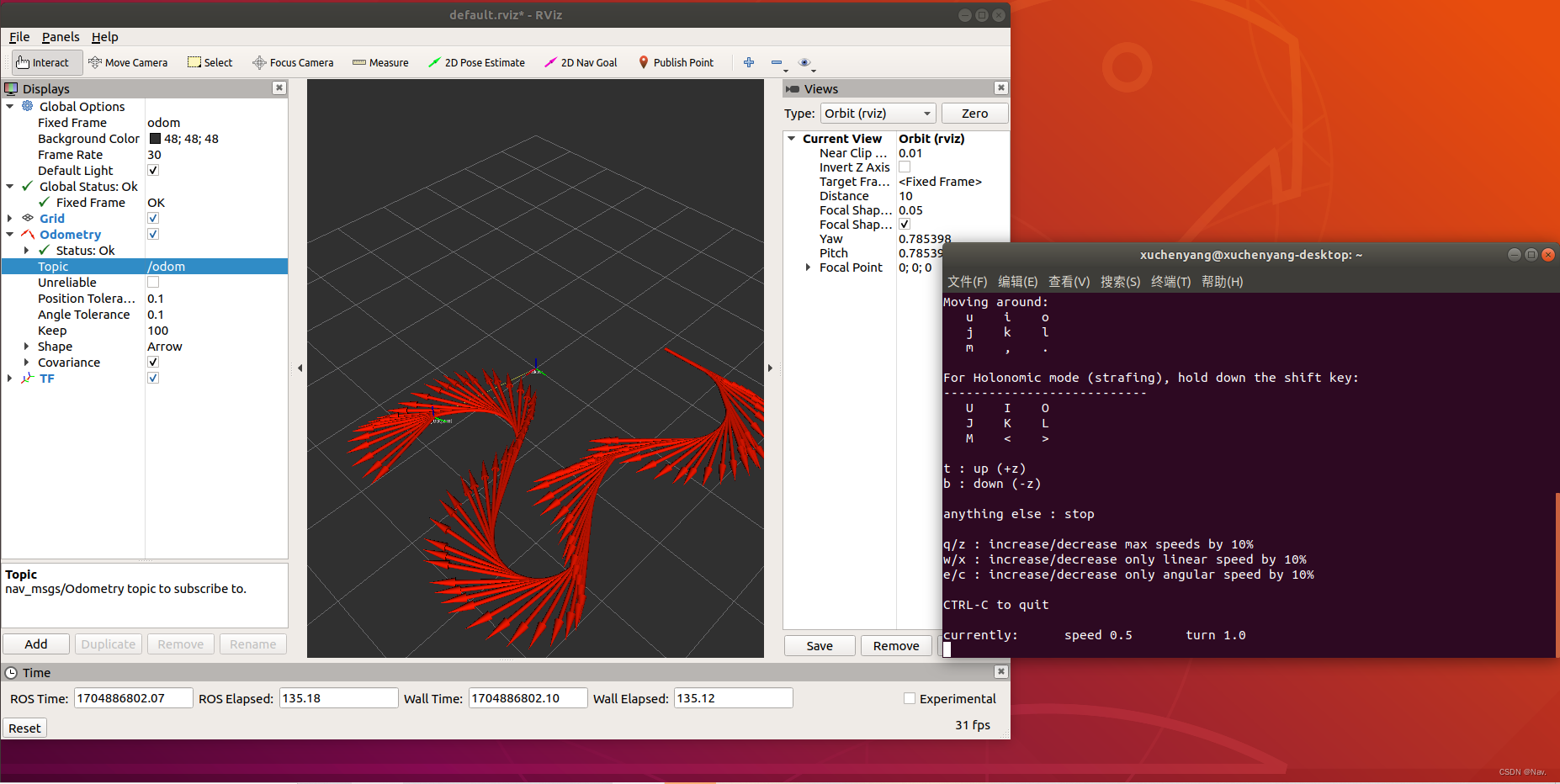
- 在PC端启动键盘控制节点。
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
- 启动rviz查看数据
相关文章:
使用ros_arduino_bridge控制机器人底盘
使用ros_arduino_bridge控制机器人底盘 搭建了ROS分布式环境后,将ros_arduino_bridge功能包上传至Jetson nano,就可以在PC端通过键盘控制小车的运动了。实现流程如下: 系统准备;下载程序;程序修改;分别启动PC与Jetson…...

Nacos下载与安装【windows】
🥚今日鸡汤🥚 我不知将去何方,但我已经在路上。 ——宫崎骏《千与千寻》 目录 🥞1.Nacosdi地址 🌭2.GitHub下载 🍿3.目录结构 🥓4.启动nacos 🧂5.客户端登陆 🧈…...
【随笔】遗传算法优化的BP神经网络(随笔,不是很详细)
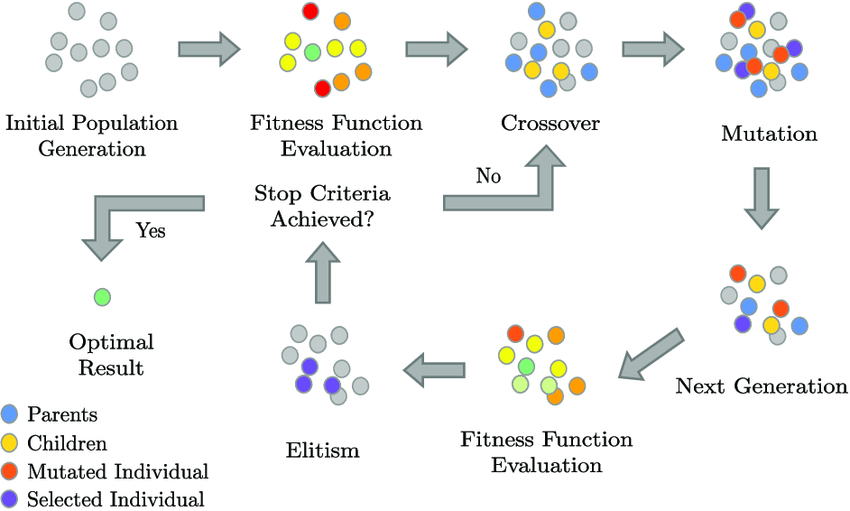
文章目录 一、算法思想1.1 BP神经网络1.2 遗传算法1.3 遗传算法优化的BP神经网络 二、代码解读2.1 数据预处理2.2 GABP2.3 部分函数说明 一、算法思想 1.1 BP神经网络 BP神经网络(Backpropagation Neural Network,反向传播神经网络)是一种监…...

Mysql 嵌套子查询
文章目录 子查询 大家好!我是夏小花,今天是2024年1月13日|腊月初三 子查询 需求是:最外层的查询语句里面包含四个不相同表的查询,根据月份进行关联查询,每个查询语句中的where条件可以自行去定义,最后返回数量和月份 …...

Qt QLabel标签控件
文章目录 1 属性和方法1.1 文本1.2 对齐方式1.3 换行1.4 图像 2. 实例2.1 布局2.2 为标签添加背景色2.3 为标签添加图片2.4 代码实现 QLabeI是Qt中的标签类,通常用于显示提示性的文本,也可以显示图像 1 属性和方法 QLabel有很多属性,完整的可…...
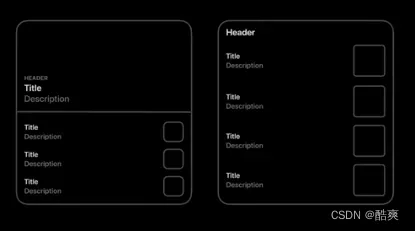
iOS14 Widget 小组件调研
桌面小组件是iOS14推出的一种新的桌面内容展现形式。 根据苹果的统计数据,“一般用户每天进入主屏幕的次数超过90次”,如果有一个我们应用的小组件在桌面,每天都有超过90次曝光在用户眼前的机会,这绝对是一个顶级的流量入口。 “…...
)
HarmonyOS的应用类型(FA vs Stage)
HarmonyOS目前提供两种应用模型 FA(Feature Ability)模型: HarmonyOS API 7开始支持的模型,已经不再主推。 Stage模型: HarmonyOS API 9开始新增的模型,是目前主推且会长期演进的模型。在该模型中,由于提供了AbilityStage、WindowStage等类作为应用组件和Window窗口的…...

Jeecg创建表单页面步骤
1.在Online表单开发里面新建一个表单页面,可以修改数据库属性、页面属性、校验字段、外键、索引,新建完成之后然后同步数据库 2.选中该表,然后生成代码,可以先把代码放在桌面,然后将文件夹是包名称的文件复制到后端代…...
leetcode17 电话号码的字母组合
方法1 if-else方法 if-else方法的思路及其简单粗暴,如下图所示,以数字234为例,数字2所对应的字母是abc,数字3所对应的是def,数字4所对应的是ghi,最后所产生的结果就类似于我们中学所学过的树状图一样&…...
用html和css实现一个加载页面【究极简单】
要创建一个简单的加载页面,你可以使用 HTML 和 CSS 来设计。以下是一个基本的加载页面示例: HTML 文件 (index.html): <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"…...

Android-消息机制Handler
Handler的机制:Android 消息传递机制就是handler。在多线程的应用场景中,将工作线程中需更新UI的操作信息 传递到 UI主线程,从而实现对UI的更新处理,最终实现异步消息的处理。多个线程并发更新UI的同时 保证线程安全。Handler只是一个入口&am…...

MySQL夯实之路-事务详解
事务四大特性 事务需要通过严格的acid测试。Acid表示原子性,一致性,隔离性,持久性。 原子性(atomicity) 事务是不可分割的最小单元,对于整个事务的操作,要么全部提交成功,要么全部…...

安泰电子前置微小信号放大器怎么用的
前置微小信号放大器是一种重要的电子设备,用于放大微弱的输入信号,提高系统的灵敏度。它在各种领域中都有广泛的应用,包括音频、通信、测量等。在这篇文章中,我们将详细介绍前置微小信号放大器的使用方法,以便更好地理…...

【深度学习每日小知识】Overfitting 过拟合
过拟合是机器学习(ML)中的常见问题,是指模型过于复杂,泛化能力较差的场景。当模型在有限数量的数据上进行训练,并且学习了特定于该特定数据集的模式,而不是适用于新的、看不见的数据的一般模式时࿰…...
嵌入式必备的WEB知识
写在前面 嵌入式要学习Wed前端吗?答案是要的,不需要深入学习,只需要简单了解即可。为什么要学习? 原因如下: 可以远程控制和管理设备:通过简单的Web知识,嵌入式系统可以建立Web界面,…...

Scipy 中级教程——信号处理
Python Scipy 中级教程:信号处理 Scipy 的信号处理模块提供了丰富的工具,用于处理和分析信号数据。在本篇博客中,我们将深入介绍 Scipy 中的信号处理功能,并通过实例演示如何应用这些工具。 1. 信号生成与可视化 首先ÿ…...
【排序篇2】选择排序、计数排序
目录 一、选择排序二、计数排序 一、选择排序 整体思想: 从数组中选出最小值和最大值放在起始位置,直到排序完成 具体步骤: 定义两个变量begin和end为下标,指向数组始末定义要找的最大值的下标为maxi,最小值的下标为…...

重生奇迹mu敏弓加点攻略
1. 选择正确的属性点分配 在重生奇迹mu游戏中敏弓的属性点分配非常重要。建议将主要属性点分配在敏捷和力量上这样可以提高敏弓的攻击力和闪避能力。适当加点在体力和魔力上可以提高敏弓的生存能力和技能释放次数。不要忘记适当加点在智力上可以提高敏弓的技能威力和命中率。 …...

用通俗易懂的方式讲解:一文讲透主流大语言模型的技术原理细节
大家好,今天的文章分享三个方面的内容: 1、比较 LLaMA、ChatGLM、Falcon 等大语言模型的细节:tokenizer、位置编码、Layer Normalization、激活函数等。 2、大语言模型的分布式训练技术:数据并行、张量模型并行、流水线并行、3D …...

通过IP地址识别风险用户
随着互联网的迅猛发展,网络安全成为企业和个人关注的焦点之一。识别和防范潜在的风险用户是维护网络安全的关键环节之一。IP数据云将探讨通过IP地址识别风险用户的方法和意义。 IP地址的基本概念:IP地址是互联网上设备的独特标识符,它分为IP…...

如何快速解锁AMD 780M APU的完整AI性能?终极优化指南
如何快速解锁AMD 780M APU的完整AI性能?终极优化指南 【免费下载链接】ROCmLibs-for-gfx1103-AMD780M-APU ROCm Library Files for gfx1103 and update with others arches based on AMD GPUs for use in Windows. 项目地址: https://gitcode.com/gh_mirrors/ro/…...
的内存溢出问题)
在Jetson Orin Nano上手动编译部署AirSLAM:如何解决TensorRT模型转换(ONNX转Engine)的内存溢出问题
在Jetson Orin Nano上手动编译部署AirSLAM:解决TensorRT模型转换内存溢出的实战指南 1. 边缘设备部署AirSLAM的核心挑战 Jetson Orin Nano作为NVIDIA面向边缘计算推出的高性能模块,其4GB/8GB内存配置在运行复杂视觉SLAM算法时面临严峻的资源约束。AirSLA…...

白春礼院士:科研活动的基本单元正从人向人机系统转变
“AIfor Science(简称为AI4S)的竞争本质上是认知体系的竞争”,3月29日,中国科学院院士白春礼在第二届浦江AI学术年会开幕式上表示,不同科研体系如何理解科学,是以模型为核心,通过高维空间中的模…...

AI 开发实战:质量门禁怎么设计,才不会让流程只剩形式
AI 开发实战:质量门禁怎么设计,才不会让流程只剩形式 一、这个问题为什么值得专门拿出来做? 在 AI 工程落地里,真正拖慢团队的往往不是模型本身,而是流程和协作方式没有跟上。 围绕“质量门禁怎么设计,才不…...

HiveWE:革新性地图编辑引擎助力魔兽争霸III创作者实现效率飞跃
HiveWE:革新性地图编辑引擎助力魔兽争霸III创作者实现效率飞跃 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 在魔兽争霸III地图开发领域,创作者长期面临着传统编辑器性能瓶颈与操作…...
Hunyuan-MT-7B开源大模型落地:Pixel Language Portal在海关报关单多语种智能填单系统中的集成
Hunyuan-MT-7B开源大模型落地:Pixel Language Portal在海关报关单多语种智能填单系统中的集成 1. 项目背景与挑战 海关报关单处理一直是国际贸易中的关键环节,传统方式面临两大核心挑战: 语言障碍:报关单涉及33种以上语言&…...

销售易发布AI原生CRM NeoAgent 2.0,引领行业迈入AI CRM 2.0时代
3月27日,在2026腾讯云城市峰会首站上海站,腾讯旗下CRM销售易重磅发布新一代营销服全场景AI原生CRM——NeoAgent 2.0。这不仅是产品迭代,更是销售易基于全新架构打造的智能体产品矩阵,标志着CRM开始从“管理工具”向“企业数字员工…...

HelixDB安全特性解析:类型安全查询如何确保生产环境可靠性
HelixDB安全特性解析:类型安全查询如何确保生产环境可靠性 【免费下载链接】helix-db HelixDB is a powerful, graph-vector database built entirely in Rust for millisecond query latency and ease of use. 项目地址: https://gitcode.com/gh_mirrors/he/heli…...

Dankoe新作《使命与收益》读书笔记 7|你不是迷茫,你只是不敢面对真正的自己
"我不知道自己想要什么。" 这大概是30岁前后最常说的一句话。辞职不敢,创业不会,留下来又不甘心。于是我们把迷茫当成一种身份,穿在身上,仿佛承认迷茫就不必为停滞负责。 但Dan Koe在《使命与收益》里说了一句扎心的话…...

如何用3dsconv解决3DS游戏格式兼容问题:从入门到精通的转换指南
如何用3dsconv解决3DS游戏格式兼容问题:从入门到精通的转换指南 【免费下载链接】3dsconv Python script to convert Nintendo 3DS CCI (".cci", ".3ds") files to the CIA format 项目地址: https://gitcode.com/gh_mirrors/3d/3dsconv …...