YOLOV8在coco128上的训练
coco128是coco数据集的子集只有128张图片
训练代码main.py
from ultralytics import YOLO# Load a model
model = YOLO("yolov8n.yaml") # build a new model from scratch
model = YOLO("yolov8n.pt") # load a pretrained model (recommended for training)# Use the model
model.train(data="coco128.yaml", epochs=3) # train the model
metrics = model.val() # evaluate model performance on the validation set
results = model("https://ultralytics.com/images/bus.jpg") # predict on an image
path = model.export(format="onnx") # export the model to ONNX format
(yolov8) nvidia@nvidia-desktop:~/yolov8$ python main.py
from n params module arguments
0 -1 1 464 ultralytics.nn.modules.conv.Conv [3, 16, 3, 2]
1 -1 1 4672 ultralytics.nn.modules.conv.Conv [16, 32, 3, 2]
2 -1 1 7360 ultralytics.nn.modules.block.C2f [32, 32, 1, True]
3 -1 1 18560 ultralytics.nn.modules.conv.Conv [32, 64, 3, 2]
4 -1 2 49664 ultralytics.nn.modules.block.C2f [64, 64, 2, True]
5 -1 1 73984 ultralytics.nn.modules.conv.Conv [64, 128, 3, 2]
6 -1 2 197632 ultralytics.nn.modules.block.C2f [128, 128, 2, True]
7 -1 1 295424 ultralytics.nn.modules.conv.Conv [128, 256, 3, 2]
8 -1 1 460288 ultralytics.nn.modules.block.C2f [256, 256, 1, True]
9 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
10 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
11 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
12 -1 1 148224 ultralytics.nn.modules.block.C2f [384, 128, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 [-1, 4] 1 0 ultralytics.nn.modules.conv.Concat [1]
15 -1 1 37248 ultralytics.nn.modules.block.C2f [192, 64, 1]
16 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
17 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1]
18 -1 1 123648 ultralytics.nn.modules.block.C2f [192, 128, 1]
19 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
20 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
21 -1 1 493056 ultralytics.nn.modules.block.C2f [384, 256, 1]
22 [15, 18, 21] 1 897664 ultralytics.nn.modules.head.Detect [80, [64, 128, 256]]
YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
New https://pypi.org/project/ultralytics/8.1.1 available 😃 Update with 'pip install -U ultralytics'
Ultralytics YOLOv8.1.0 🚀 Python-3.10.13 torch-2.0.1+cu117 CUDA:0 (NVIDIA GeForce RTX 4060 Ti, 16081MiB)
engine/trainer: task=detect, mode=train, model=yolov8n.pt, data=coco128.yaml, epochs=3, time=None, patience=50, batch=16, imgsz=640, save=True, save_period=-1, cache=False, device=None, workers=8, project=None, name=train3, exist_ok=False, pretrained=True, optimizer=auto, verbose=True, seed=0, deterministic=True, single_cls=False, rect=False, cos_lr=False, close_mosaic=10, resume=False, amp=True, fraction=1.0, profile=False, freeze=None, multi_scale=False, overlap_mask=True, mask_ratio=4, dropout=0.0, val=True, split=val, save_json=False, save_hybrid=False, conf=None, iou=0.7, max_det=300, half=False, dnn=False, plots=True, source=None, vid_stride=1, stream_buffer=False, visualize=False, augment=False, agnostic_nms=False, classes=None, retina_masks=False, embed=None, show=False, save_frames=False, save_txt=False, save_conf=False, save_crop=False, show_labels=True, show_conf=True, show_boxes=True, line_width=None, format=torchscript, keras=False, optimize=False, int8=False, dynamic=False, simplify=False, opset=None, workspace=4, nms=False, lr0=0.01, lrf=0.01, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=7.5, cls=0.5, dfl=1.5, pose=12.0, kobj=1.0, label_smoothing=0.0, nbs=64, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0, auto_augment=randaugment, erasing=0.4, crop_fraction=1.0, cfg=None, tracker=botsort.yaml, save_dir=runs/detect/train3
from n params module arguments
0 -1 1 464 ultralytics.nn.modules.conv.Conv [3, 16, 3, 2]
1 -1 1 4672 ultralytics.nn.modules.conv.Conv [16, 32, 3, 2]
2 -1 1 7360 ultralytics.nn.modules.block.C2f [32, 32, 1, True]
3 -1 1 18560 ultralytics.nn.modules.conv.Conv [32, 64, 3, 2]
4 -1 2 49664 ultralytics.nn.modules.block.C2f [64, 64, 2, True]
5 -1 1 73984 ultralytics.nn.modules.conv.Conv [64, 128, 3, 2]
6 -1 2 197632 ultralytics.nn.modules.block.C2f [128, 128, 2, True]
7 -1 1 295424 ultralytics.nn.modules.conv.Conv [128, 256, 3, 2]
8 -1 1 460288 ultralytics.nn.modules.block.C2f [256, 256, 1, True]
9 -1 1 164608 ultralytics.nn.modules.block.SPPF [256, 256, 5]
10 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
11 [-1, 6] 1 0 ultralytics.nn.modules.conv.Concat [1]
12 -1 1 148224 ultralytics.nn.modules.block.C2f [384, 128, 1]
13 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
14 [-1, 4] 1 0 ultralytics.nn.modules.conv.Concat [1]
15 -1 1 37248 ultralytics.nn.modules.block.C2f [192, 64, 1]
16 -1 1 36992 ultralytics.nn.modules.conv.Conv [64, 64, 3, 2]
17 [-1, 12] 1 0 ultralytics.nn.modules.conv.Concat [1]
18 -1 1 123648 ultralytics.nn.modules.block.C2f [192, 128, 1]
19 -1 1 147712 ultralytics.nn.modules.conv.Conv [128, 128, 3, 2]
20 [-1, 9] 1 0 ultralytics.nn.modules.conv.Concat [1]
21 -1 1 493056 ultralytics.nn.modules.block.C2f [384, 256, 1]
22 [15, 18, 21] 1 897664 ultralytics.nn.modules.head.Detect [80, [64, 128, 256]]
Model summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
Transferred 355/355 items from pretrained weights
Freezing layer 'model.22.dfl.conv.weight'
AMP: running Automatic Mixed Precision (AMP) checks with YOLOv8n...
AMP: checks passed ✅
train: Scanning /home/nvidia/datasets/coco128/labels/train2017.cache... 126 images, 2 backgrounds, 0 corrupt: 100%|██████████| 128/12
val: Scanning /home/nvidia/datasets/coco128/labels/train2017.cache... 126 images, 2 backgrounds, 0 corrupt: 100%|██████████| 128/128
Plotting labels to runs/detect/train3/labels.jpg...
optimizer: 'optimizer=auto' found, ignoring 'lr0=0.01' and 'momentum=0.937' and determining best 'optimizer', 'lr0' and 'momentum' automatically...
optimizer: AdamW(lr=0.000119, momentum=0.9) with parameter groups 57 weight(decay=0.0), 64 weight(decay=0.0005), 63 bias(decay=0.0)
3 epochs...
Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size
1/3 2.66G 1.226 1.615 1.274 178 640: 100%|██████████| 8/8 [00:03<00:00, 2.63it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:00<00:00, 4.44it/
all 128 929 0.645 0.533 0.614 0.455
Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size
2/3 2.67G 1.225 1.514 1.268 231 640: 100%|██████████| 8/8 [00:01<00:00, 5.24it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:00<00:00, 5.06it/
all 128 929 0.675 0.538 0.626 0.467
Epoch GPU_mem box_loss cls_loss dfl_loss Instances Size
3/3 2.71G 1.209 1.448 1.222 178 640: 100%|██████████| 8/8 [00:01<00:00, 5.52it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:00<00:00, 4.99it/
all 128 929 0.676 0.548 0.632 0.47
3 epochs completed in 0.003 hours.
Optimizer stripped from runs/detect/train3/weights/last.pt, 6.5MB
Optimizer stripped from runs/detect/train3/weights/best.pt, 6.5MB
Validating runs/detect/train3/weights/best.pt...
Ultralytics YOLOv8.1.0 🚀 Python-3.10.13 torch-2.0.1+cu117 CUDA:0 (NVIDIA GeForce RTX 4060 Ti, 16081MiB)
Model summary (fused): 168 layers, 3151904 parameters, 0 gradients, 8.7 GFLOPs
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 4/4 [00:03<00:00, 1.13it/
all 128 929 0.675 0.549 0.632 0.469
person 128 254 0.802 0.671 0.769 0.542
bicycle 128 6 0.581 0.333 0.332 0.286
car 128 46 0.844 0.217 0.285 0.178
motorcycle 128 5 0.687 0.886 0.938 0.721
airplane 128 6 0.826 0.799 0.903 0.673
bus 128 7 0.745 0.714 0.736 0.648
train 128 3 0.556 0.667 0.83 0.731
truck 128 12 1 0.353 0.498 0.304
boat 128 6 0.293 0.167 0.351 0.225
traffic light 128 14 0.696 0.168 0.202 0.139
stop sign 128 2 0.966 1 0.995 0.711
bench 128 9 0.838 0.575 0.637 0.4
bird 128 16 0.923 0.748 0.88 0.53
cat 128 4 0.866 1 0.995 0.835
dog 128 9 0.704 0.778 0.821 0.633
horse 128 2 0.536 1 0.995 0.511
elephant 128 17 0.851 0.765 0.879 0.669
bear 128 1 0.631 1 0.995 0.995
zebra 128 4 0.857 1 0.995 0.965
giraffe 128 9 0.899 0.993 0.973 0.714
backpack 128 6 0.605 0.333 0.392 0.234
umbrella 128 18 0.71 0.5 0.663 0.453
handbag 128 19 0.518 0.0582 0.18 0.0947
tie 128 7 0.69 0.642 0.641 0.457
suitcase 128 4 0.641 1 0.828 0.596
frisbee 128 5 0.567 0.8 0.759 0.663
skis 128 1 0.473 1 0.995 0.497
snowboard 128 7 0.661 0.714 0.755 0.486
sports ball 128 6 0.703 0.406 0.503 0.29
kite 128 10 0.811 0.5 0.595 0.208
baseball bat 128 4 0.574 0.362 0.414 0.174
baseball glove 128 7 0.672 0.429 0.429 0.295
skateboard 128 5 0.776 0.6 0.6 0.44
tennis racket 128 7 0.742 0.415 0.529 0.367
bottle 128 18 0.508 0.389 0.394 0.24
wine glass 128 16 0.584 0.562 0.581 0.361
cup 128 36 0.632 0.287 0.4 0.279
fork 128 6 0.597 0.167 0.264 0.193
knife 128 16 0.643 0.5 0.612 0.351
spoon 128 22 0.554 0.182 0.332 0.18
bowl 128 28 0.676 0.571 0.615 0.495
banana 128 1 0 0 0.166 0.048
sandwich 128 2 0.394 0.5 0.497 0.497
orange 128 4 1 0.313 0.995 0.666
broccoli 128 11 0.471 0.182 0.247 0.221
carrot 128 24 0.739 0.458 0.658 0.411
hot dog 128 2 0.65 0.95 0.828 0.796
pizza 128 5 0.689 1 0.995 0.86
donut 128 14 0.639 1 0.946 0.859
cake 128 4 0.658 1 0.995 0.88
chair 128 35 0.514 0.514 0.468 0.262
couch 128 6 0.746 0.493 0.673 0.497
potted plant 128 14 0.739 0.643 0.722 0.484
bed 128 3 0.768 0.667 0.806 0.636
dining table 128 13 0.484 0.615 0.504 0.415
toilet 128 2 1 0.869 0.995 0.946
tv 128 2 0.384 0.5 0.695 0.656
laptop 128 3 1 0 0.696 0.544
mouse 128 2 1 0 0.0527 0.00527
remote 128 8 0.849 0.5 0.583 0.507
cell phone 128 8 0 0 0.0688 0.0465
microwave 128 3 0.63 0.667 0.863 0.719
oven 128 5 0.472 0.4 0.338 0.269
sink 128 6 0.367 0.167 0.232 0.159
refrigerator 128 5 0.688 0.4 0.647 0.525
book 128 29 0.621 0.114 0.328 0.187
clock 128 9 0.779 0.781 0.893 0.713
vase 128 2 0.418 1 0.828 0.745
scissors 128 1 1 0 0.249 0.0746
teddy bear 128 21 0.884 0.381 0.64 0.429
toothbrush 128 5 0.9 0.6 0.786 0.503
Speed: 3.0ms preprocess, 1.8ms inference, 0.0ms loss, 1.2ms postprocess per image
Results saved to runs/detect/train3
Ultralytics YOLOv8.1.0 🚀 Python-3.10.13 torch-2.0.1+cu117 CUDA:0 (NVIDIA GeForce RTX 4060 Ti, 16081MiB)
Model summary (fused): 168 layers, 3151904 parameters, 0 gradients, 8.7 GFLOPs
val: Scanning /home/nvidia/datasets/coco128/labels/train2017.cache... 126 images, 2 backgrounds, 0 corrupt: 100%|██████████| 128/128
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 8/8 [00:03<00:00, 2.06it/
all 128 929 0.658 0.548 0.627 0.466
person 128 254 0.808 0.68 0.773 0.542
bicycle 128 6 0.569 0.333 0.326 0.283
car 128 46 0.805 0.217 0.285 0.178
motorcycle 128 5 0.689 0.896 0.898 0.697
airplane 128 6 0.827 0.803 0.903 0.681
bus 128 7 0.681 0.714 0.736 0.648
train 128 3 0.551 0.667 0.83 0.731
truck 128 12 1 0.374 0.494 0.295
boat 128 6 0.261 0.167 0.324 0.14
traffic light 128 14 0.696 0.168 0.202 0.139
stop sign 128 2 0.93 1 0.995 0.711
bench 128 9 0.842 0.596 0.636 0.4
bird 128 16 0.853 0.75 0.866 0.5
cat 128 4 0.863 1 0.995 0.835
dog 128 9 0.682 0.778 0.821 0.626
horse 128 2 0.53 1 0.995 0.515
elephant 128 17 0.849 0.765 0.879 0.669
bear 128 1 0.626 1 0.995 0.995
zebra 128 4 0.854 1 0.995 0.965
giraffe 128 9 0.744 0.971 0.943 0.732
backpack 128 6 0.613 0.333 0.391 0.238
umbrella 128 18 0.675 0.5 0.657 0.453
handbag 128 19 0.554 0.0698 0.173 0.0932
tie 128 7 0.698 0.665 0.641 0.457
suitcase 128 4 0.633 1 0.828 0.596
frisbee 128 5 0.563 0.8 0.759 0.663
skis 128 1 0.461 1 0.995 0.497
snowboard 128 7 0.657 0.714 0.757 0.484
sports ball 128 6 0.705 0.411 0.502 0.274
kite 128 10 0.801 0.5 0.598 0.206
baseball bat 128 4 0.577 0.25 0.348 0.174
baseball glove 128 7 0.638 0.429 0.429 0.295
skateboard 128 5 0.871 0.6 0.6 0.44
tennis racket 128 7 0.744 0.419 0.529 0.365
bottle 128 18 0.469 0.389 0.358 0.217
wine glass 128 16 0.574 0.562 0.554 0.347
cup 128 36 0.566 0.278 0.401 0.286
fork 128 6 0.59 0.167 0.228 0.195
knife 128 16 0.563 0.5 0.587 0.358
spoon 128 22 0.633 0.182 0.331 0.186
bowl 128 28 0.737 0.643 0.658 0.498
banana 128 1 0 0 0.0995 0.042
sandwich 128 2 0.161 0.241 0.497 0.497
orange 128 4 1 0.321 0.995 0.666
broccoli 128 11 0.501 0.182 0.257 0.207
carrot 128 24 0.728 0.558 0.653 0.418
hot dog 128 2 0.649 0.946 0.828 0.796
pizza 128 5 0.717 1 0.995 0.86
donut 128 14 0.637 1 0.94 0.854
cake 128 4 0.61 1 0.945 0.845
chair 128 35 0.484 0.543 0.472 0.258
couch 128 6 0.613 0.5 0.745 0.578
potted plant 128 14 0.716 0.643 0.723 0.481
bed 128 3 0.757 0.667 0.913 0.661
dining table 128 13 0.457 0.615 0.496 0.391
toilet 128 2 1 0.875 0.995 0.946
tv 128 2 0.378 0.5 0.695 0.656
laptop 128 3 1 0 0.605 0.484
mouse 128 2 1 0 0.0698 0.00698
remote 128 8 0.845 0.5 0.605 0.514
cell phone 128 8 0 0 0.0696 0.0469
microwave 128 3 0.617 0.667 0.863 0.733
oven 128 5 0.431 0.4 0.339 0.27
sink 128 6 0.378 0.167 0.18 0.131
refrigerator 128 5 0.684 0.4 0.65 0.517
book 128 29 0.637 0.122 0.343 0.195
clock 128 9 0.78 0.788 0.894 0.734
vase 128 2 0.407 1 0.828 0.745
scissors 128 1 1 0 0.249 0.0746
teddy bear 128 21 0.883 0.381 0.634 0.42
toothbrush 128 5 0.636 0.6 0.736 0.468
Speed: 3.4ms preprocess, 13.3ms inference, 0.0ms loss, 3.5ms postprocess per image
Results saved to runs/detect/train32
Found https://ultralytics.com/images/bus.jpg locally at bus.jpg
image 1/1 /home/nvidia/yolov8/bus.jpg: 640x480 4 persons, 1 bus, 1 stop sign, 17.2ms
Speed: 4.8ms preprocess, 17.2ms inference, 3.0ms postprocess per image at shape (1, 3, 640, 480)
Ultralytics YOLOv8.1.0 🚀 Python-3.10.13 torch-2.0.1+cu117 CPU (Intel Xeon E5-2686 v4 2.30GHz)
PyTorch: starting from 'runs/detect/train3/weights/best.pt' with input shape (1, 3, 640, 640) BCHW and output shape(s) (1, 84, 8400) (6.2 MB)
ONNX: starting export with onnx 1.15.0 opset 17...
============= Diagnostic Run torch.onnx.export version 2.0.1+cu117 =============
verbose: False, log level: Level.ERROR
======================= 0 NONE 0 NOTE 0 WARNING 0 ERROR ========================
ONNX: export success ✅ 0.9s, saved as 'runs/detect/train3/weights/best.onnx' (12.2 MB)
Export complete (2.4s)
Results saved to /home/nvidia/yolov8/runs/detect/train3/weights
Predict: yolo predict task=detect model=runs/detect/train3/weights/best.onnx imgsz=640
Validate: yolo val task=detect model=runs/detect/train3/weights/best.onnx imgsz=640 data=/home/nvidia/anaconda3/envs/yolov8/lib/python3.10/site-packages/ultralytics/cfg/datasets/coco128.yaml
Visualize: https://netron.app 可视化网站
相关文章:

YOLOV8在coco128上的训练
coco128是coco数据集的子集只有128张图片 训练代码main.py from ultralytics import YOLO# Load a model model YOLO("yolov8n.yaml") # build a new model from scratch model YOLO("yolov8n.pt") # load a pretrained model (recommended for trai…...

设计模式——享元模式
享元模式(Flyweight Pattern)是一种结构型设计模式,它的主要目的是通过共享已存在的对象来大幅度减少需要创建的对象数量,从而降低系统内存消耗和提高性能。它通过将对象的状态划分为内部状态(Intrinsic State…...
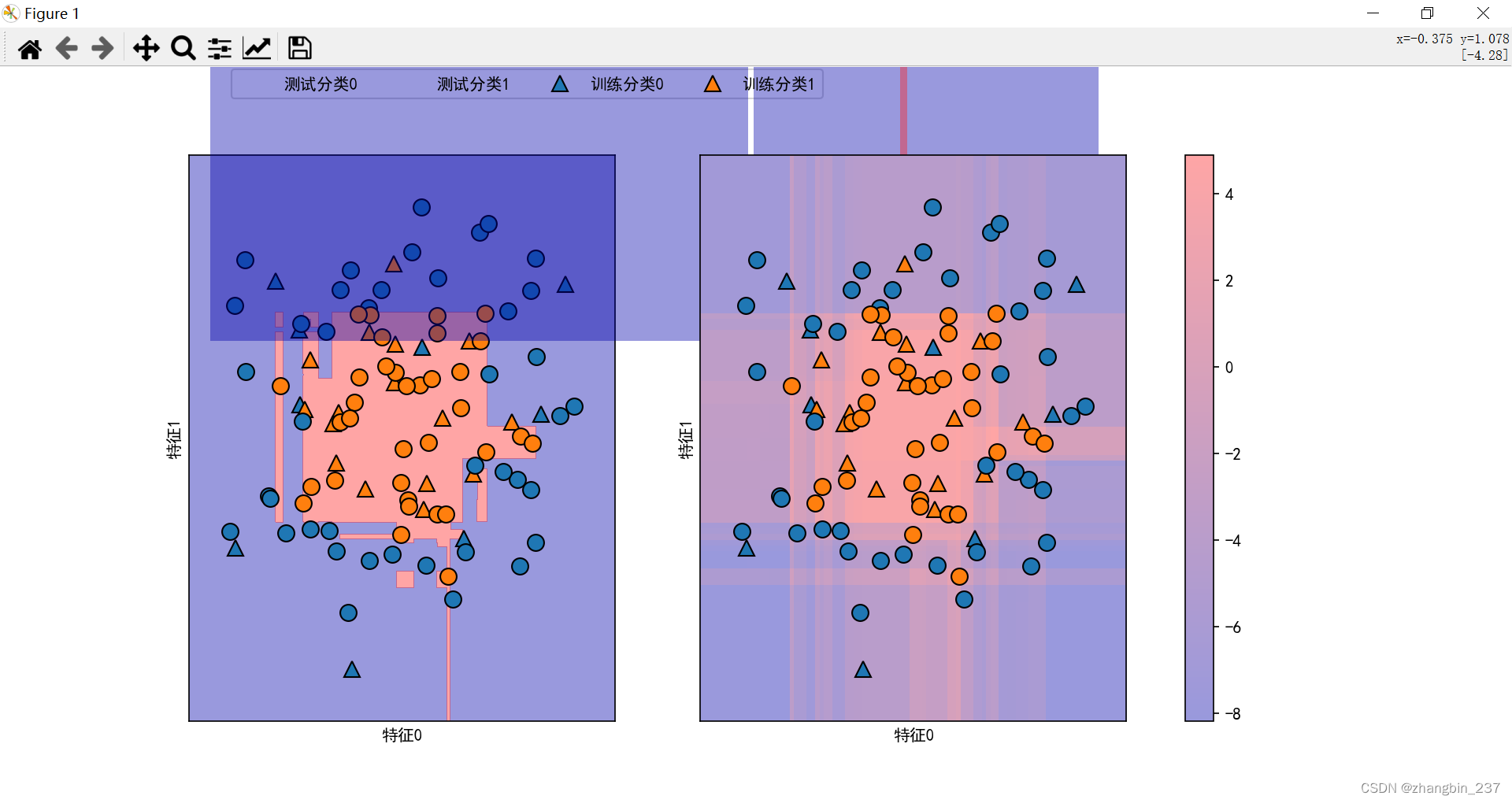
【Python机器学习】分类器的不确定估计——决策函数
scikit-learn接口的分类器能够给出预测的不确定度估计,一般来说,分类器会预测一个测试点属于哪个类别,还包括它对这个预测的置信程度。 scikit-learn中有两个函数可以用于获取分类器的不确定度估计:decidion_function和predict_pr…...

云原生周刊:K8sGPT 加入 CNCF | 2024.1.8
开源项目推荐 VolSync VolSync 使用 rsync 或 rclone 在集群之间异步复制 Kubernetes 持久卷。它还支持通过 Restic 创建持久卷的备份。 KubeClarity KubeClarity 是一种用于检测和管理软件物料清单 (SBOM) 以及容器映像和文件系统漏洞的工具。它扫描运行时 K8s 集群和 CI/…...
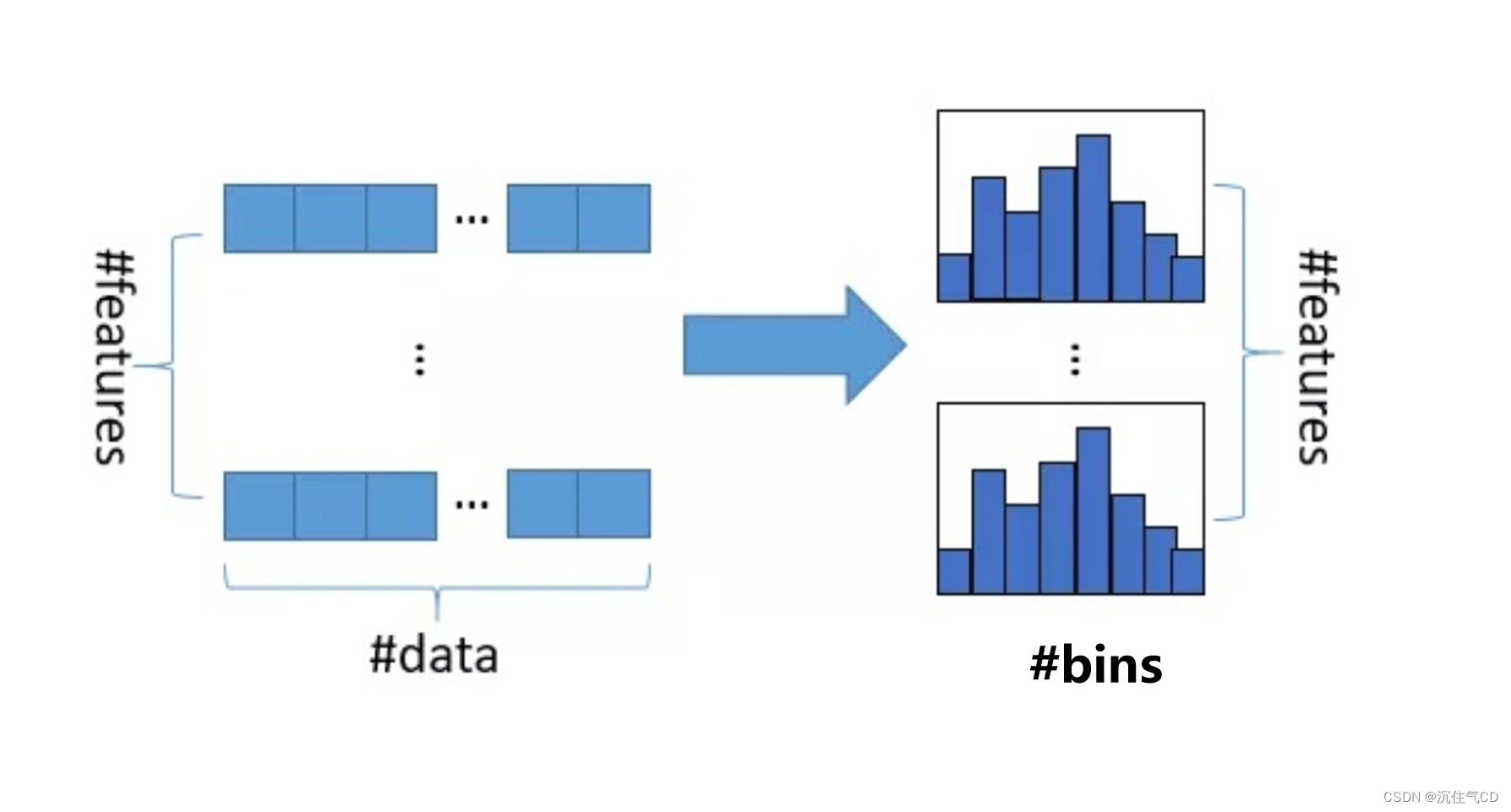
LightGBM原理和调参
背景知识 LightGBM(Light Gradient Boosting Machine)是一个实现GBDT算法的框架,具有支持高效率的并行训练、更快的训练速度、更低的内存消耗、更好的准确率、支持分布式可以处理海量数据等优点。 普通的GBDT算法不支持用mini-batch的方式训练,在每一次…...

ROS无人机开发常见错误
飞控部分 一、解锁时飞控不闪红灯,无任何反应,地面站也无报错 解决办法: 打开地面站的遥控器一栏 首先检查右下角Channel Monitor是否有识别出遥控各通道的值,如果没有,检查遥控器是否打开,遥控器和接收…...
)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为AVI视频格式(C#)
Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现相机图像转换为视频格式(C#) Baumer工业相机Baumer工业相机的图像转换为OpenCV的图像的技术背景在NEOAPI SDK里实现相机图像转换为视频格式 工业相机通过OpenCV实现相机图像转换为视频格式的优…...

第一次面试总结 - 迈瑞医疗 - 软件测试
🧸欢迎来到dream_ready的博客,📜相信您对专栏 “本人真实面经” 很感兴趣o (ˉ▽ˉ;) 专栏 —— 本人真实面经,更多真实面试经验,中大厂面试总结等您挖掘 注:此次面经全靠小嘴八八,没…...

利用Qt输出XML文件
使用Qt输出xml文件 void PixelConversionLibrary::generateXML() {QFile file("D:/TEST.xml");//创建xml文件if (!file.open(QIODevice::WriteOnly | QIODevice::Text))//以只写方式,文本模式打开文件{qDebug() << "generateXML:Failed to op…...
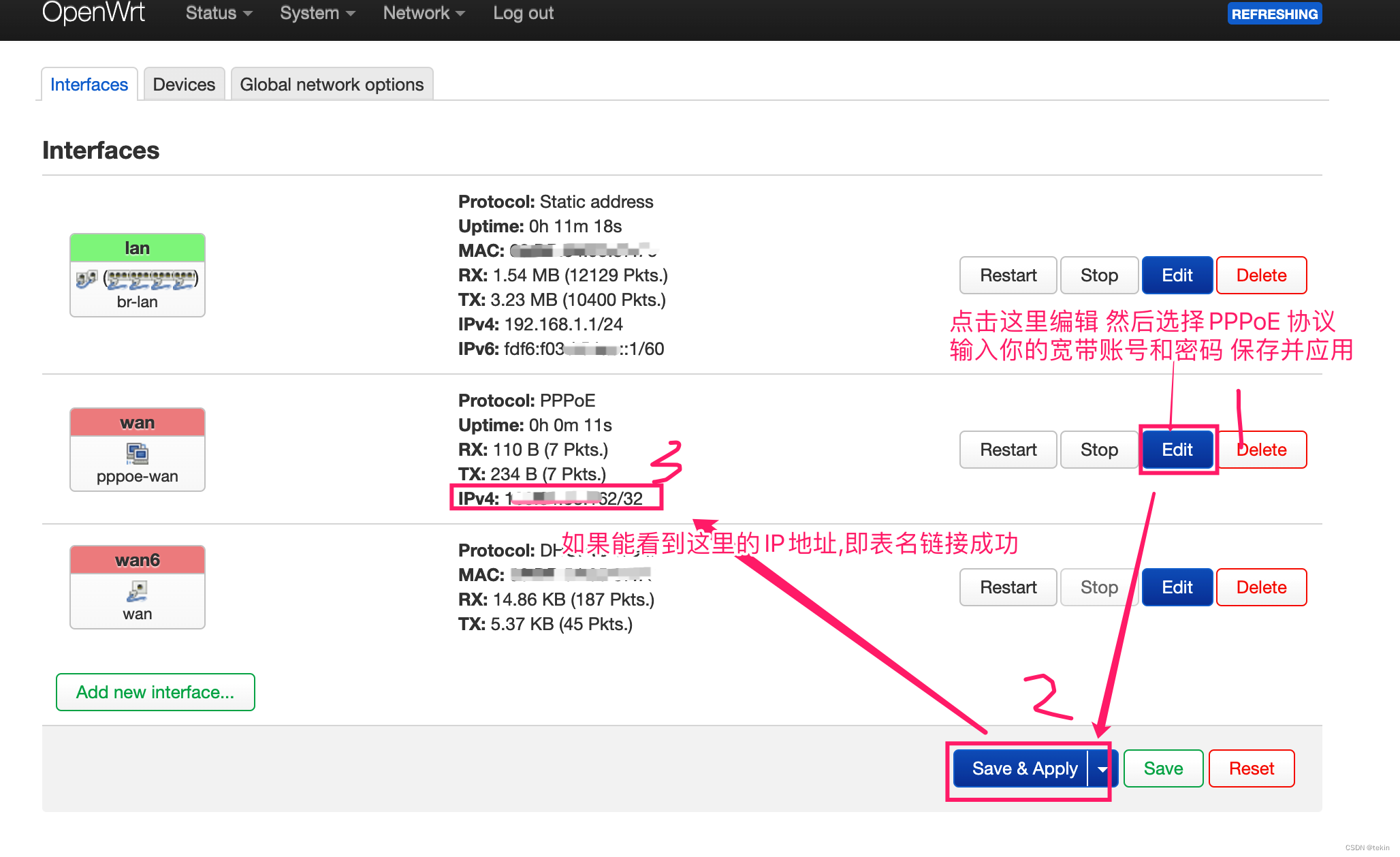
OpenWrt智能路由器Wan PPPoE拨号配置方法
OpenWrt智能路由器的wan PPPoE拨号配置方法和我们常见的不太一样, 需要先找到wan网卡,然后将协议切换为 PPPoE然后才能看到输入上网账号和密码的地方. 首先登录路由器 http://openwrt.lan/ 然后找到 Network --> Interfaces 这里会显示你当前的路由器的所有接口, 选择 …...

(十一)IIC总线-AT24C02-EEPROM
文章目录 IIC总线篇AT24C02-EEPROM篇主要特性引脚说明AT24Cxx用几位数据地址随机寻址的(存储器组织)AT24C02设备操作AT24CXX设备寻址EEPROM写操作的种类EEPROM读操作的种类实现单字节写实现任意读读写应用 IIC总线篇 前面介绍过了,请参考 (十)IIC总线-PCF8591-ADC/…...

现在做电商还有发展空间吗?哪个平台的盈利比较大?
我是电商珠珠 对于部分人来说,实体店的投入太大,一上来就是十几w,有时候还看不到结果。 所以有的人就瞄准了电商这个圈子,做线上平台。 大家都知道,近年来直播电商很火,所以很多商家都会去找达人带货&am…...

多节点 docker 部署 elastic 集群
参考 Install Elasticsearch with Docker Images 环境 docker # docker version Client: Docker Engine - CommunityVersion: 24.0.7API version: 1.43Go version: go1.20.10Git commit: afdd53bBuilt: Thu Oct 26 09:08:01 202…...
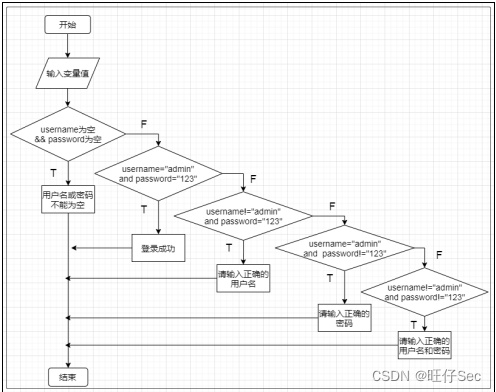
2023年全国职业院校技能大赛软件测试赛题—单元测试卷⑨
单元测试 一、任务要求 题目1:根据下列流程图编写程序实现相应分析处理并显示结果。返回文字“xa*a*b的值:”和x的值;返回文字“xa-b的值:”和x的值;返回文字“xab的值:”和x的值。其中变量a、b均须为整型…...
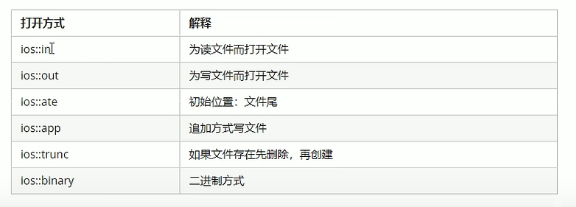
C++核心编程——文件操作
本专栏记录C学习过程包括C基础以及数据结构和算法,其中第一部分计划时间一个月,主要跟着黑马视频教程,学习路线如下,不定时更新,欢迎关注。 当前章节处于: ---------第1阶段-C基础入门 ---------第2阶段实战…...

【REST2SQL】05 GO 操作 达梦 数据库
【REST2SQL】01RDB关系型数据库REST初设计 【REST2SQL】02 GO连接Oracle数据库 【REST2SQL】03 GO读取JSON文件 【REST2SQL】04 REST2SQL第一版Oracle版实现 信创要求用国产数据库,刚好有项目用的达梦,研究一下go如何操作达梦数据库 1 准备工作 1.1 安…...

GitLab 502 Whoops, GitLab is taking too much time to respond. 解决
1、先通过gitlab-ctl restart进行重启,2分钟后看是否可以正常访问,为什么要2分钟,因为gitlab启动会有很多配套的服务启动,包括postgresql等 2、如果上面不行,再看gitlab日志,通过gitlab-ctl tail命令查看&…...

vi ~/.bashrc 后如何编辑并退出
在使用 vi 编辑器打开 ~/.bashrc 文件后,可以按照以下步骤编辑并保存退出: vi ~/.bashrc 按 i 进入插入模式: 在 vi 编辑器中,按 i 键将进入插入模式。在插入模式中,您可以编辑文本。 编辑文件: 在插入模…...

KVM Vcpu概述
KVM Vcpu概述 Intel VTSMP系统CPU过载使用CPU模型CPU绑定和亲和性CPU优化 Intel VT Intel的硬件虚拟化技术大致分为3类: 1、VT-x技术:是指Intel处理器中的一些虚拟化技术支持,包括CPU中最基础的VMX技术,也包括内存虚拟化的硬件支…...

linux服务器ftp部署
1、ftp服务安装 # 检查是否安装 1、查询安装列表 sudo systemctl list-unit-files --typeservice | grep ftp 2、查询ftp服务状态 sudo service vsftpd status 或者 sudo systemctl status vsftpd # yum安装,一般yum仓库都有ftp安装包 sudo yum install vsftpd # 启…...

嵌入式C编程挑战与防御性编程实践
1. 嵌入式C编程的核心挑战在嵌入式系统开发中,C语言因其接近硬件的特性和高效的执行效率成为首选语言。然而,嵌入式环境与通用计算环境存在显著差异,这些差异给程序员带来了独特的挑战。1.1 硬件资源的严格限制嵌入式设备通常具有:…...

Sentinel-1 SAR数据预处理后,如何在QGIS里做地表变化监测?一个完整案例
Sentinel-1 SAR数据在QGIS中的地表变化监测实战指南 当你在SNAP中完成了Sentinel-1 SAR数据的预处理,获得了地理编码后的后向散射系数图,这只是整个分析流程的开始。真正的挑战在于如何将这些数据转化为可操作的地表变化信息。本文将带你深入探索从预处理…...

ZYNQ7010核心板硬件设计实战——从原理图到PCB的工程化思考
1. 从零开始构建ZYNQ7010核心板 第一次接触ZYNQ7010这种集成了ARM处理器和FPGA的SoC芯片时,我既兴奋又忐忑。这种混合架构的芯片确实强大,但随之而来的硬件设计复杂度也让人头疼。特别是当看到官方推荐的8层甚至12层PCB方案时,作为个人开发者…...

VASP机器学习力场训练避坑指南:从INCAR参数设置到声子谱验证的完整流程
VASP机器学习力场训练实战:参数调优与声子谱诊断全解析 在材料计算领域,VASP结合机器学习力场的技术路线正逐渐成为平衡计算精度与效率的黄金标准。但当我们真正着手训练自己的力场模型时,往往会发现教程中的理想案例与实际操作之间存在巨大鸿…...

如何通过Windows Cleaner实现C盘空间释放:提升系统性能的完整指南
如何通过Windows Cleaner实现C盘空间释放:提升系统性能的完整指南 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红的困扰&#…...

远程收款好用服务商
在数字化支付日益普及的今天,远程收款成为许多商家和创业者的重要需求。然而,由于各种风控限制,微信支付、支付宝等主流支付平台在异地收款时常常出现异常提示或风险拦截,给用户带来了不少困扰。本文将对比分析几家提供远程收款服…...

FreeFileSync 14.9更新:多维度优化提升使用体验
FreeFileSync 14.9:核心功能更新亮点FreeFileSync作为一款适用于Windows、macOS和Linux的开源文件夹对比和同步软件,在14.9版本有了诸多重要更新。在Linux系统方面,支持高DPI显示器上的200%显示缩放,这对于使用高分辨率显示器的用…...

解锁B站资源:BilibiliDown高效视频下载全方案
解锁B站资源:BilibiliDown高效视频下载全方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/bi/Bilibi…...

让Apple触控设备在Windows系统完美运行的驱动解决方案
让Apple触控设备在Windows系统完美运行的驱动解决方案 【免费下载链接】mac-precision-touchpad Windows Precision Touchpad Driver Implementation for Apple MacBook / Magic Trackpad 项目地址: https://gitcode.com/gh_mirrors/ma/mac-precision-touchpad 当你在Wi…...

再也不怕消息被撤回!Windows防撤回工具完全使用指南
再也不怕消息被撤回!Windows防撤回工具完全使用指南 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitcode.com/…...