基于STM32微控制器的四轮智能小车控制系统设计
标题:基于STM32微控制器的四轮智能小车控制系统设计与实现
摘要:
本文针对移动机器人领域的应用需求,详细介绍了基于STM32系列单片机(以STM32F103C8T6为例)为核心的四轮小车控制系统的设计和实现过程。该系统集成了电机驱动控制、传感器数据采集、自主导航算法以及无线通信等多种功能模块,实现了小车的基本运动控制、避障以及目标点追踪等功能。
一、引言
简述了STM32微控制器在嵌入式系统中的广泛应用及其优势,并概述了四轮小车控制系统的研究背景与意义。
二、系统总体设计方案
1. 系统架构:描述了包括主控单元(STM32)、电机驱动模块、传感器模块(如超声波测距、红外避障、陀螺仪等)、电源管理系统及无线通信模块的整体结构。
2. 功能需求分析:明确了系统需要实现的基础功能,如速度调节、方向控制、障碍物检测与规避、远程操控和路径规划等。
三、硬件设计与实现
1. STM32微控制器选型及最小系统设计;
2. 电机驱动电路设计,包括H桥驱动芯片的选择和PWM调速方法;
3. 各类传感器接口设计与信号调理;
4. 无线通信模块选择与连接方式;
5. 电源管理与电路保护设计。
四、软件设计与编程
1. STM32固件开发流程介绍,包含中断服务程序设计、PID算法实现、数据处理与滤波算法、无线数据包收发协议等;
2. 基于STM32CubeMX进行项目初始化配置;
3. 自主导航算法的实现,例如模糊逻辑控制、PID控制或A*搜索算法等;
4. 小车状态监测与故障诊断策略。
五、系统集成与测试
1. 硬件平台搭建与调试;
2. 软件功能验证与性能测试;
3. 不同应用场景下的实际运行效果展示;
4. 测试结果分析与问题讨论。
六、结论与展望
总结了基于STM32的四轮小车控制系统的设计成果和实际表现,对未来系统的优化方向和技术升级进行了探讨。
关键词:STM32;四轮小车;电机控制;传感器融合;自主导航;无线通信
由于代码实现会涉及到具体的硬件接口、传感器类型和通信协议等细节,这里仅提供一个基于STM32控制四轮小车的基本框架示例。实际项目中需要根据具体硬件配置进行调整。
```c
#include "stm32f10x.h"
#include "MotorDriver.h" // 假设已经包含了电机驱动模块的库文件
#include "UltrasonicSensor.h" // 假设已经包含了超声波测距传感器的库文件
#include "IRSensor.h" // 假设已经包含了红外避障传感器的库文件// 定义电机引脚和传感器接口
#define LEFT_MOTOR_FWD GPIO_Pin_8
#define LEFT_MOTOR_BWD GPIO_Pin_9
#define RIGHT_MOTOR_FWD GPIO_Pin_10
#define RIGHT_MOTOR_BWD GPIO_Pin_11
#define ULTRASONIC_TRIG GPIO_Pin_5
#define ULTRASONIC_ECHO GPIO_Pin_6
#define IRSensor_PIN GPIO_Pin_7// 电机速度设置
#define MOTOR_SPEED_NORMAL 50 // PWM占空比// 初始化系统
void System_Init(void) {RCC_Configuration(); // 配置系统时钟GPIO_Configuration(); // 配置GPIO端口Motor_Init(); // 初始化电机驱动模块Ultrasonic_Init(ULTRASONIC_TRIG, ULTRASONIC_ECHO); // 初始化超声波传感器IRSensor_Init(IRSensor_PIN); // 初始化红外避障传感器
}// 主循环
int main(void) {System_Init();while (1) {uint16_t distance = Ultrasonic_GetDistance(); // 获取超声波传感器测量的距离if (distance < SAFE_DISTANCE) { // 如果距离小于安全距离,则执行避障操作Motor_Stop(); // 停止小车Delay_ms(DELAY_TIME); // 等待一段时间} else {int ir_status = IRSensor_Read(); // 读取红外传感器状态if (ir_status == CLEAR) { // 若前方无障碍物Motor_Forward(MOTOR_SPEED_NORMAL); // 小车前进} else {Motor_Stop(); // 若前方有障碍物,停止小车}}}return 0;
}// 其他辅助函数如RCC_Configuration(), GPIO_Configuration() 和 Motor_Forward()等需根据实际情况编写```
这段代码仅为示例,并不完整,且未包含所有可能的功能(例如无线通信、PID控制算法、路径规划等)。在实际项目中,还需要结合具体应用场景和需求来详细设计和实现各个功能模块。
相关文章:

基于STM32微控制器的四轮智能小车控制系统设计
标题:基于STM32微控制器的四轮智能小车控制系统设计与实现 摘要: 本文针对移动机器人领域的应用需求,详细介绍了基于STM32系列单片机(以STM32F103C8T6为例)为核心的四轮小车控制系统的设计和实现过程。该系统集成了电…...

JPA的复杂查询包括一对多多对一和多对多的查询
1. 多表关联查询和排序 假设我们有两个实体类:Customer和Order,它们之间是一对多的关系,即一个客户可以有多个订单。我们想要查询某个客户的所有订单,并按订单金额进行降序排序。 Entity Table(name "customers") pu…...
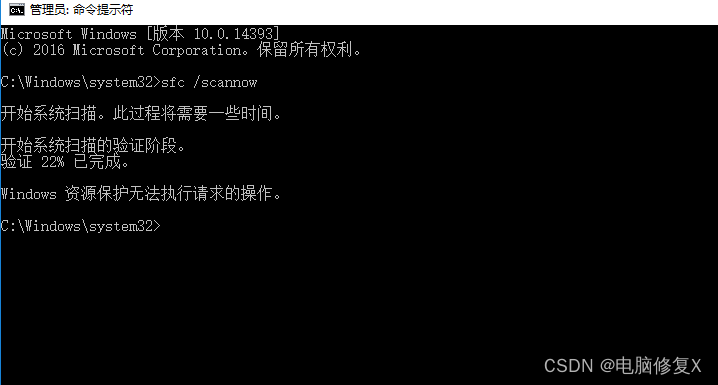
电脑文件mfc100u.dll丢失的解决方法分析,怎么修复mfc100u.dll靠谱
mfc100u.dll丢失了要怎么办?其实很多人都遇到过这样的电脑故障吧,说这个mfc100u.dll文件已经不见了,然后一些程序打不开了,那么这种情况我们要怎么解决呢?今天我们就来给大家详细的说说mfc100u.dll丢失的解决方法。 一…...
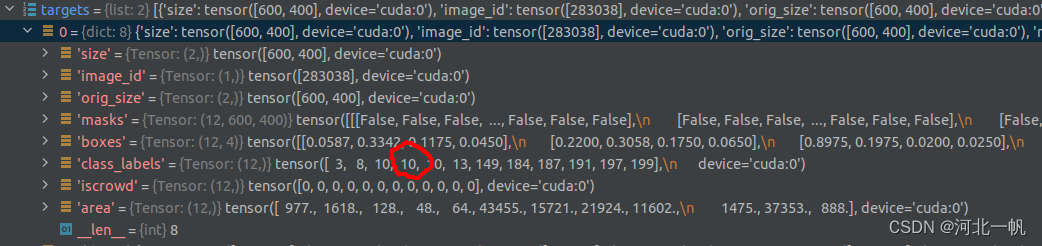
从DETR到Mask2former(2): 损失函数loss function
DETR的损失函数包括几个部分,如果只看论文或者代码,比较难理解,最好是可以打断点调试,对照着论文看。但是现在DETR模型都已经被集成进各种框架中,很难进入内部打断掉调试。与此同时,数据的label的前处理也比…...
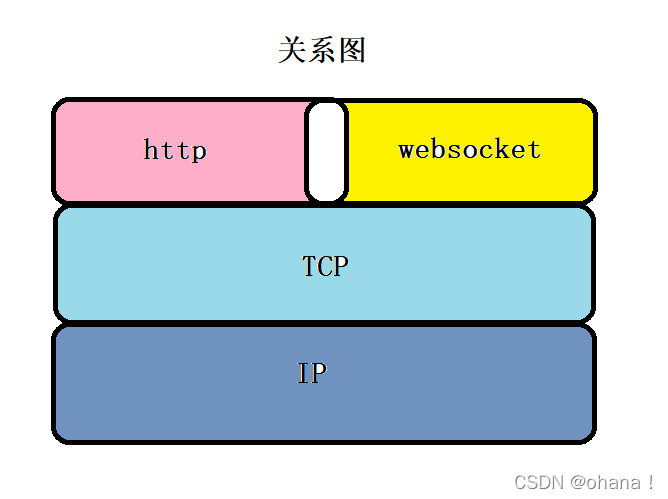
Java21 + SpringBoot3集成WebSocket
文章目录 前言相关技术简介什么是WebSocketWebSocket的原理WebSocket与HTTP协议的关系WebSocket优点WebSocket应用场景 实现方式1. 添加maven依赖2. 添加WebSocket配置类,定义ServerEndpointExporter Bean3. 定义WebSocket Endpoint4. 前端创建WebSocket对象 总结 前…...

鲸鱼优化算法WOA改进预告
鲸鱼优化算法(Whale Optimization Algorithm,WOA)是一种基于自然界中鲸鱼群体行为的启发式优化算法。这个算法模拟了鲸鱼的觅食行为和社会行为,通过模拟这些行为来解决优化问题。 以下是鲸鱼优化算法的一些关键特点和步骤&#x…...
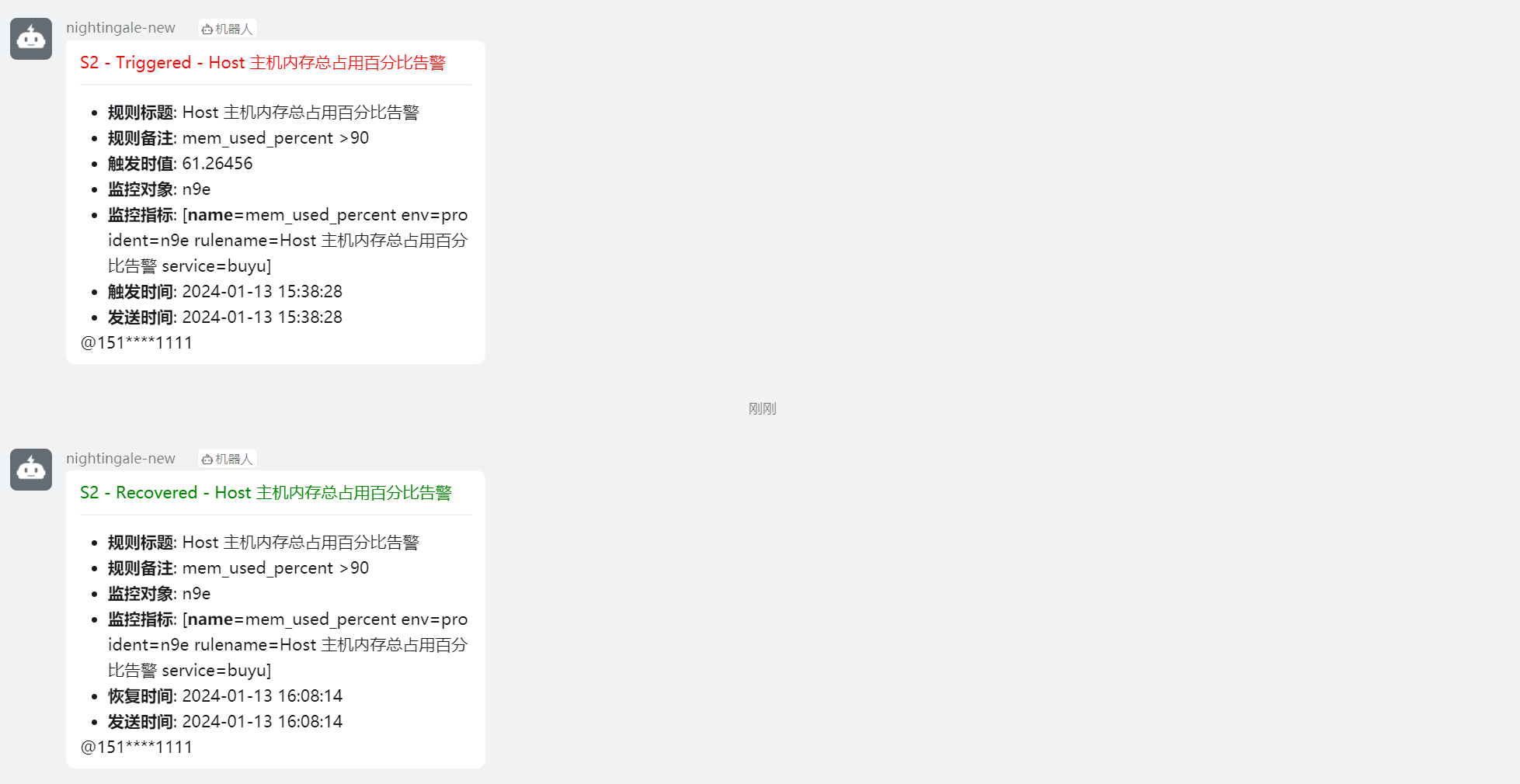
Nightingale 夜莺监控系统 - 告警篇(3)
Author:rab 官方文档:https://flashcat.cloud/docs/content/flashcat-monitor/nightingale-v6/usage/alert/alert-rule/ 目录 前言一、配置1.1 创建钉钉机器人1.2 n9e 创建通知用户1.3 n9e 创建团队(组)1.4 将通知用户添加团队1.…...

【LeetCode2696】删除子串后的字符串最小长度
1、题目描述 【题目链接】 标签:栈 、字符串、模拟 难度:简单 给你一个仅由 大写 英文字符组成的字符串 s 。 你可以对此字符串执行一些操作,在每一步操作中,你可以从 s 中删除 任一个 “AB” 或 “CD” 子字符串。 通过执行操作…...
VMware安装CentOS7虚拟机
VMware 安装 获取 VMware 安装包 下载地址:链接:https://pan.baidu.com/s/1ELR5NZa7rO6YVplZ1IUigw?pwdplz3 提取码:plz3 包括:当然,也可以自己去别的地方下载,WMware 版本都差不多,现在用的比…...
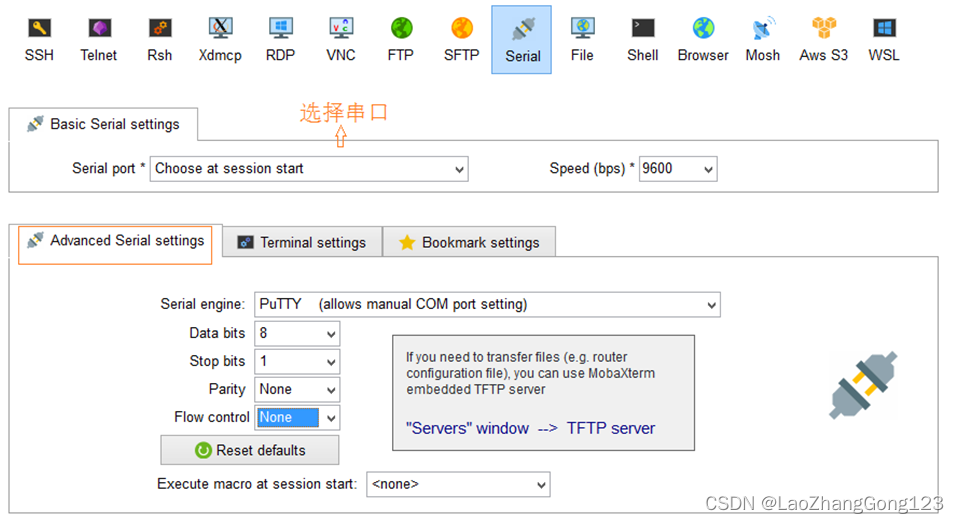
Linux第22步_安装CH340驱动和串口终端软件MobaXterm
开发板输出信息通常是采用串口,而计算机通常是USB接口,为了让他们之间能够交换数据,我们通常采用USB转串口的转换器来实现。目前市场上的串口转换器大多是采用CH340芯片来实现的,因此我们需要在计算中安装一个CH340驱动程序&#…...
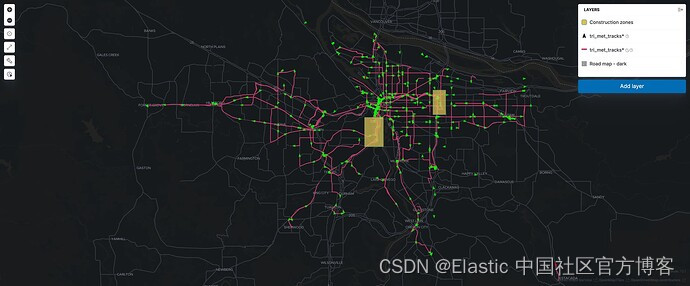
Elasticsearch 地理空间搜索 - 远超 OpenSearch
作者:来自 Elastic Nathan_Reese 2021 年,OpenSearch 和 OpenSearch Dashboards 开始作为 Elasticsearch 和 Kibana 的分支。 尽管 OpenSearch 和 OpenSearch Dashboards 具有相似的血统,但它们不提供相同的功能。 在分叉时,只能克…...

USB micro输入口中三个问题详解——差分信号、自恢复保险丝SMD1210P050TF、电容滤波
前言:本文对USB micro输入口中遇见的三个问题进行详解:差分信号、自恢复保险丝SMD1210P050TF、电容滤波 目录: 差分信号 自恢复保险丝SMD1210P050TF 电容滤波 如下图,USB为U-F-M5DD-Y-1型号(9个引脚,除…...
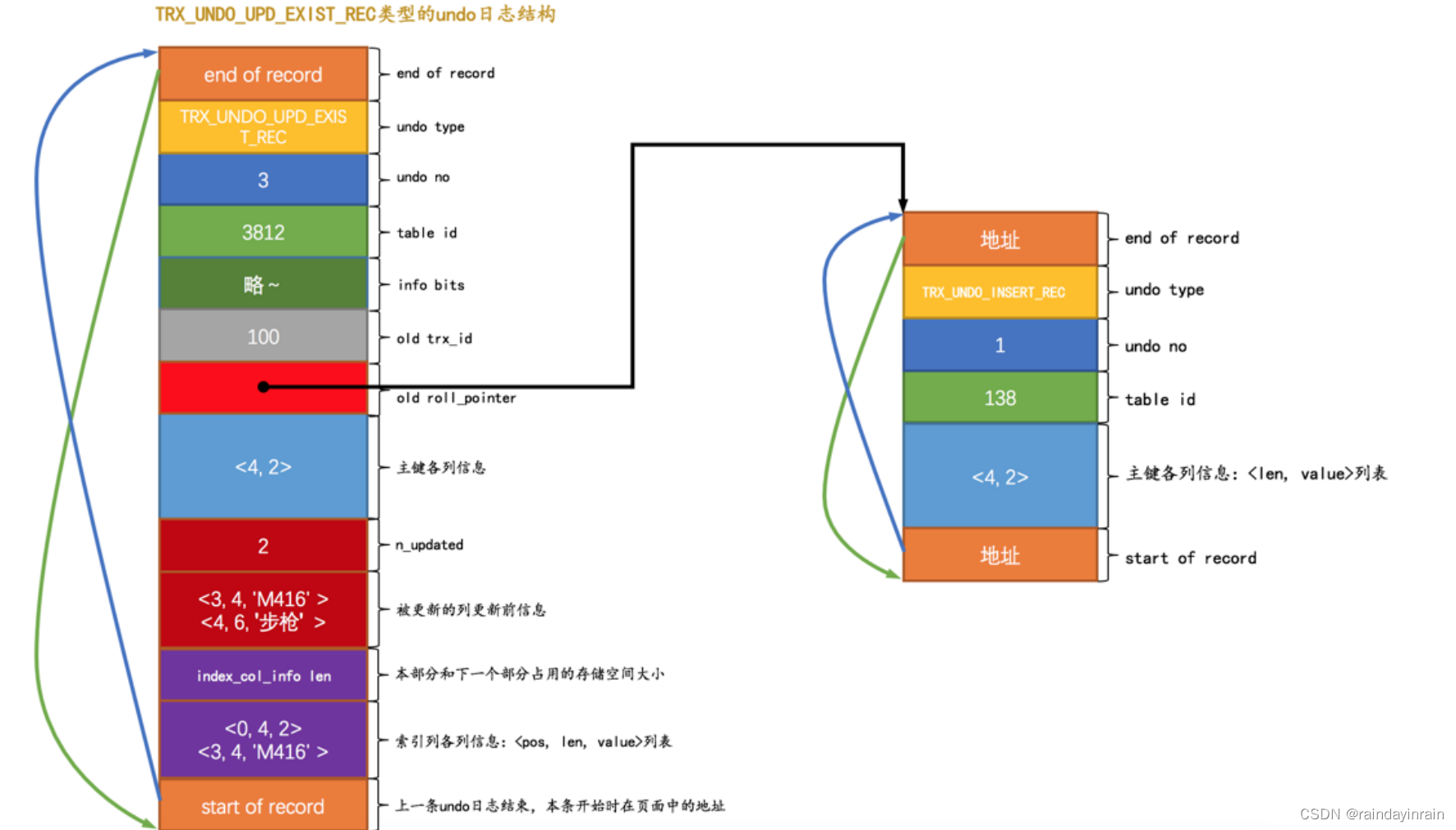
mysql原理--undo日志1
1.事务回滚的需求 我们说过 事务 需要保证 原子性 ,也就是事务中的操作要么全部完成,要么什么也不做。但是偏偏有时候事务执行到一半会出现一些情况,比如: (1). 事务执行过程中可能遇到各种错误,比如服务器本身的错误&…...
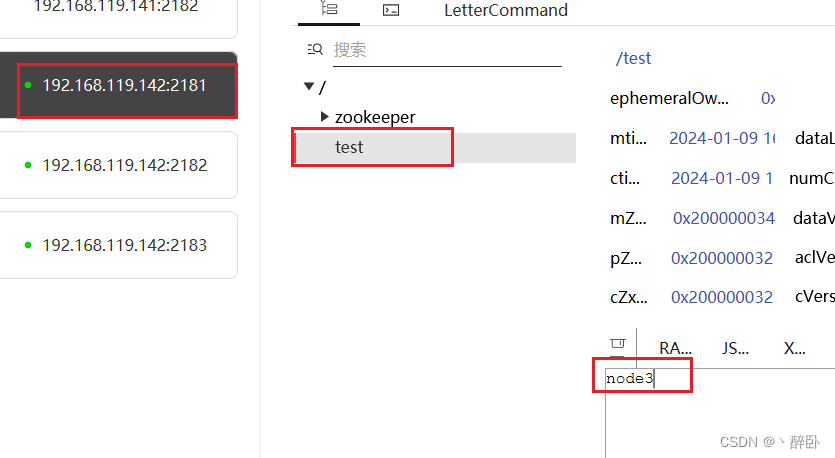
Zookeeper系列(一)集群搭建(非容器)
系列文章 Zookeeper系列(一)集群搭建(非容器) 目录 前言 下载 搭建 Data目录 Conf目录 集群复制和修改 启动 配置示例 测试 总结 前言 Zookeeper是一个开源的分布式协调服务,其设计目标是将那些复杂的且容易出错的分…...

【高等数学之泰勒公式】
一、从零开始 1.1、泰勒中值定理1 什么是泰勒公式?我们先看看权威解读: 那么我们从古至今到底是如何创造出泰勒公式的呢? 由上图可知,任一无穷小数均可以表示成用一系列数字的求和而得出的结果,我们称之为“无穷算法”。 那么同理我们想对任一曲线来…...

奇异值分解在图形压缩中的应用
奇异值分解在图形压缩中的应用 在研究奇异值分解的工程应用之前,我们得明白什么是奇异值?什么是奇异向量? 奇异值与奇异向量 概念:奇异值描述了矩阵在一组特定向量上的行为,奇异向量描述了其最大的作用方向。 奇异值…...

C++深入学习之STL:1、容器部分
标准模板库STL的组成 主要由六大基本组件组成:容器、迭代器、算法、适配器、函数对象(仿函数)以及空间配置器。 容器:就是用来存数据的,也称为数据结构。 本文要详述的是容器主要如下: 序列式容器:vector、list 关联…...

Javascript——vue下载blob文档流
<el-table-column label"操作" fixed"right" width"150" showOverflowTooltip><template slot-scope"scope"><el-button type"text" v-has"stbsd-gjcx-down" class"edit-button" click&…...

C# 的SequenceEqual
SequenceEqual 是 LINQ 扩展方法之一,用于比较两个序列(如数组、列表等)的元素是否相等。 该方法的详细定义如下: public static bool SequenceEqual<TSource>(this IEnumerable<TSource> first, IEnumerable<TS…...
)
第九部分 使用函数 (一)
目录 一、简介 二、函数的调用语法 一、简介 在 Makefile 中可以使用函数来处理变量,从而让我们的命令或是规则更为的灵活和具 有智能。make 所支持的函数也不算很多,不过已经足够我们的操作了。函数调用后,函数 的返回值可以当做变量来使用…...

别再让运动模糊毁了你的检测!一文搞懂工业相机飞拍里的CMOS传感器与快门速度怎么配
工业相机飞拍实战:CMOS传感器与快门速度的黄金搭配法则 在一条每分钟处理300个瓶盖的高速灌装线上,质检员小王发现相机拍摄的字符总是出现拖影——这已经是本周第三次因图像模糊导致误检停线了。类似场景每天都在全球数以万计的自动化产线上演࿰…...
)
保姆级教程:用Davinci Configurator配置RH850F1KMS1双看门狗(AWO域与ISO域)
RH850F1KMS1双看门狗配置实战:从AWO域到ISO域的完整设计指南 在汽车电子开发领域,系统可靠性直接关系到行车安全。RH850F1KMS1作为瑞萨电子面向功能安全应用的高性能MCU,其独特的双看门狗架构(AWO域与ISO域)为系统提供…...

汇编开发与系统构建:FloppyBird操作系统游戏的技术解构
汇编开发与系统构建:FloppyBird操作系统游戏的技术解构 【免费下载链接】floppybird Floppy Bird (OS) 项目地址: https://gitcode.com/gh_mirrors/fl/floppybird 一、价值:当游戏成为操作系统的技术突破 在计算机科学领域,"操作…...
 1、机械制图 2、机械制造 3、机械原理 4、机械设计)
机械设计制造及自动化—万门大学月特训班 (清华老师讲授) 1、机械制图 2、机械制造 3、机械原理 4、机械设计
机械设计制造及自动化—万门大学月特训班 (清华老师讲授) 1、机械制图 2、机械制造 3、机械原理 4、机械设计 全580集,直接从零基础到机械设计与自动化行业大佬 在这里插入图片描述...
)
chromedp实战:如何用JavaScript绕过iframe内容获取难题(附完整代码)
chromedp实战:突破iframe内容获取的JavaScript高阶技巧 在电商数据抓取和动态内容监控场景中,iframe始终是爬虫开发者最头疼的障碍之一。传统DOM操作方法在iframe嵌套页面面前往往束手无策,而chromedp提供的Evaluate系列方法则打开了新世界的…...

告别OpenAI依赖:用智谱AI与轻量本地模型构建RAG评估实战
1. 为什么需要替代OpenAI的RAG评估方案 当我们在构建RAG(检索增强生成)系统时,评估环节至关重要。传统的Ragas框架默认使用OpenAI的GPT模型进行评估,但这会带来几个实际问题: 首先是访问稳定性问题。由于网络环境差异…...

QT控件自适应布局实战:从零到窗口响应式设计
1. QT控件自适应布局入门指南 第一次接触QT界面开发时,最让我头疼的就是窗口大小变化后控件乱成一团的问题。记得当时做的一个小工具,在笔记本上运行好好的,接到大显示器上所有按钮都挤在左上角,简直惨不忍睹。后来摸索出这套自适…...

电子工程师如何提升专业英语能力
电子工程师的专业英语能力培养指南 1. 技术英语的重要性 1.1 行业历史背景 半导体IC产业起源于硅谷,从仙童半导体到Intel的发展历程奠定了现代电子技术的基础。编程语言从最早的机器语言发展到现代高级语言,操作系统从CP/M演进到今天的Windows、Linux和…...

LoRA训练助手效果展示:动漫风格迁移作品集
LoRA训练助手效果展示:动漫风格迁移作品集 1. 引言 你是否曾经想过,把自己拍摄的普通照片转换成新海诚风格的唯美画面,或者让日常场景拥有吉卜力工作室的梦幻质感?现在,这一切都不再是梦想。通过LoRA训练助手&#x…...

C语言起源发展全知道,带你了解编程界元老的辉煌历程
C言语是一种具有通用性的编程言语,在软件开发范畴被广泛运用,如操作系统、嵌入式系统、高性能服务器还有各类应用软件,它因强大功能、简洁语法以及高效性能而闻名,本文会详细介绍C言语的起源、发展进程以及其在当今编程世界里的地…...