4D 毫米波雷达:智驾普及的新路径(二)
4 4D 毫米波的技术路线探讨
4.1 前端收发模块 MMIC:级联、CMOS、AiP
4.1.1 设计:级联、单芯片、虚拟孔径

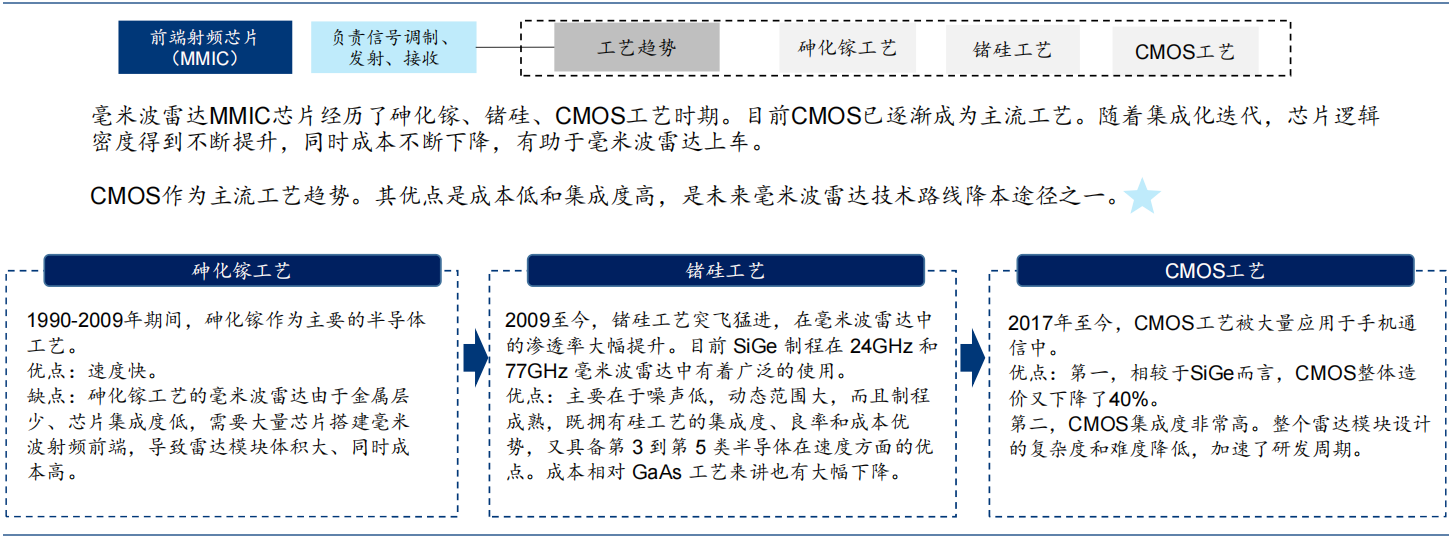
4.1.2 MMIC 工艺:GaAs-SiGe-CMOS
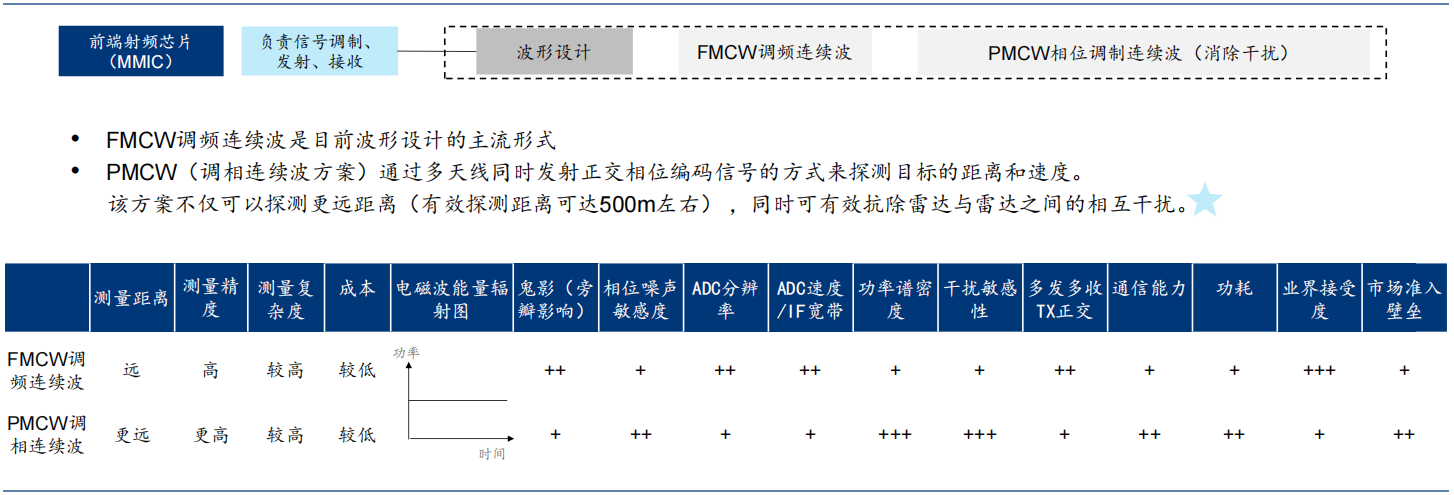
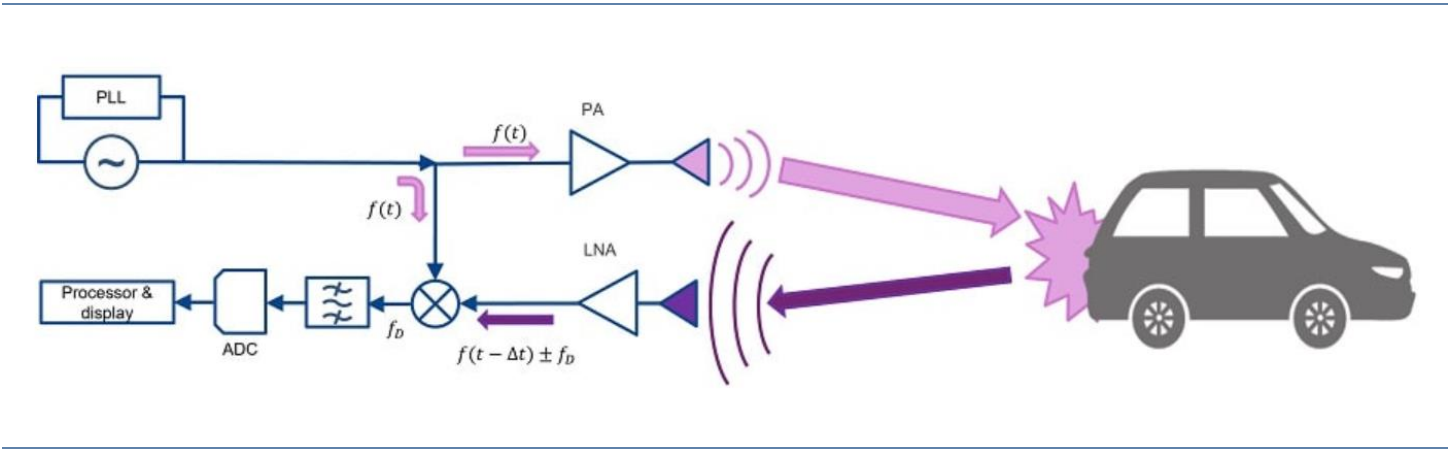
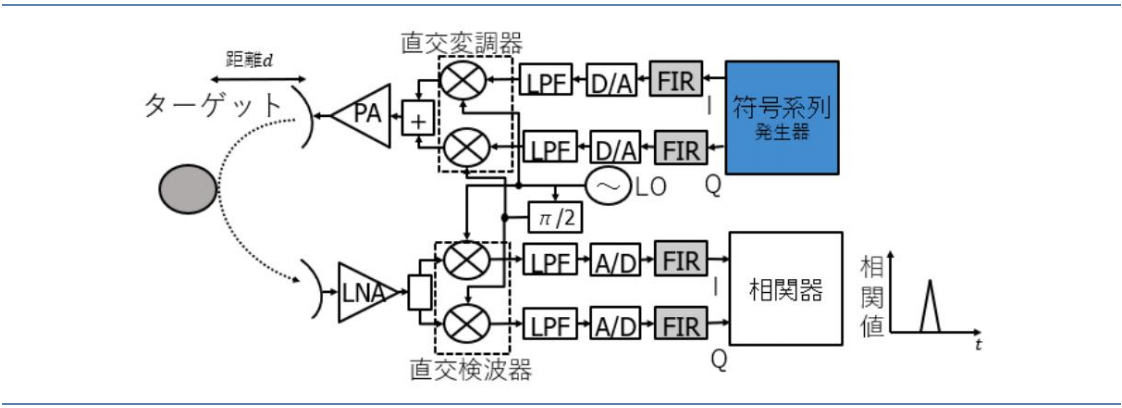
4.1.3 波形:FMCW、PMCW
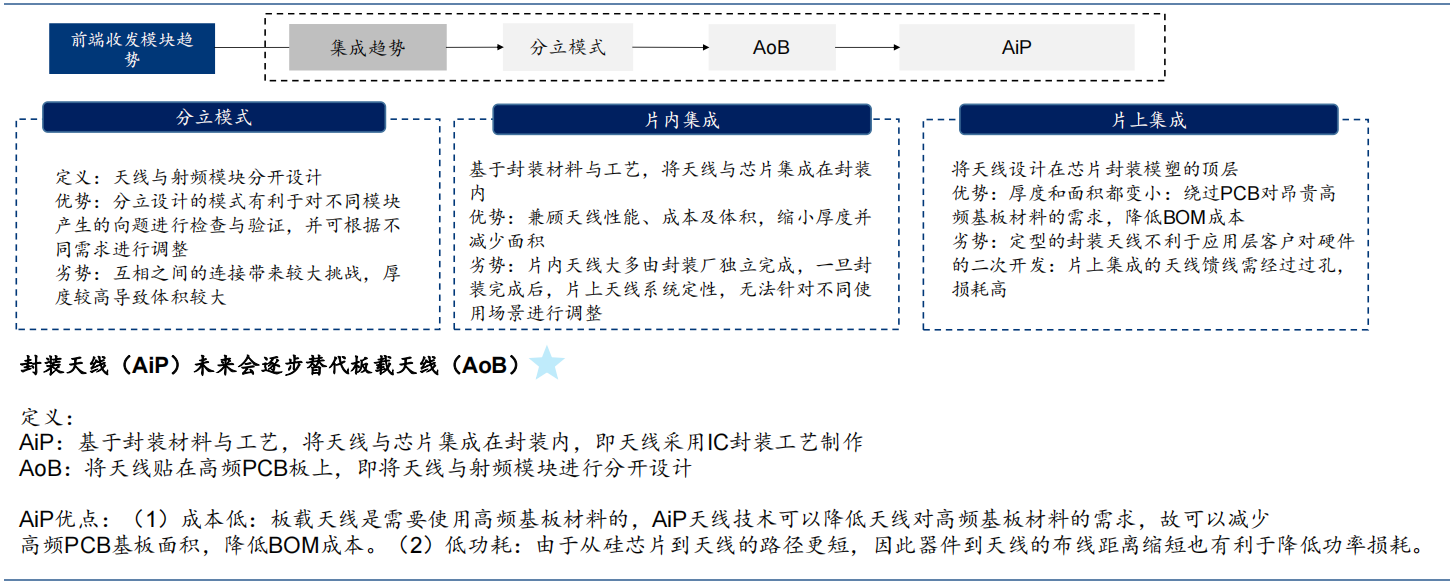
4.2 天线:分立-AoB-AiP
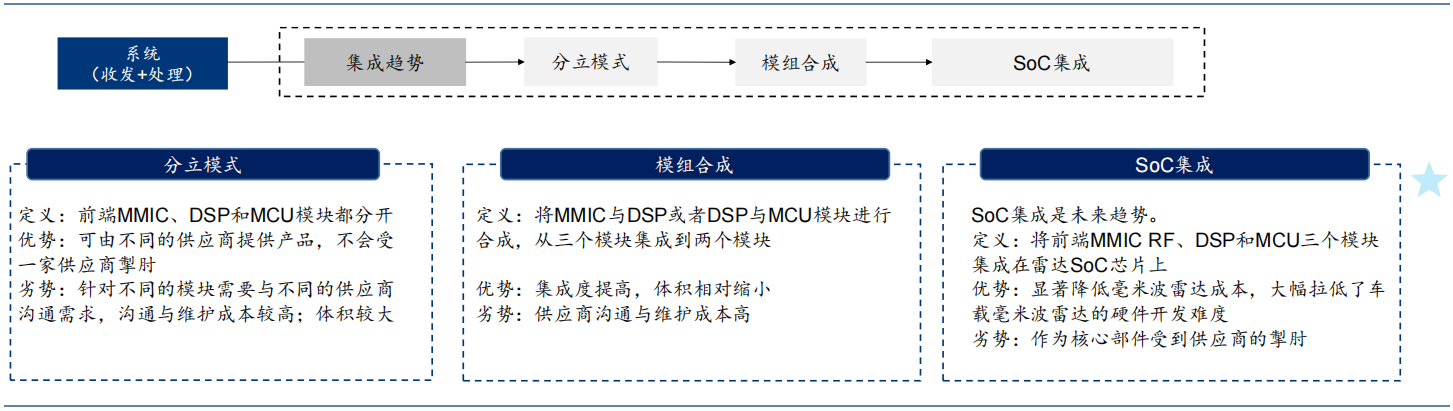
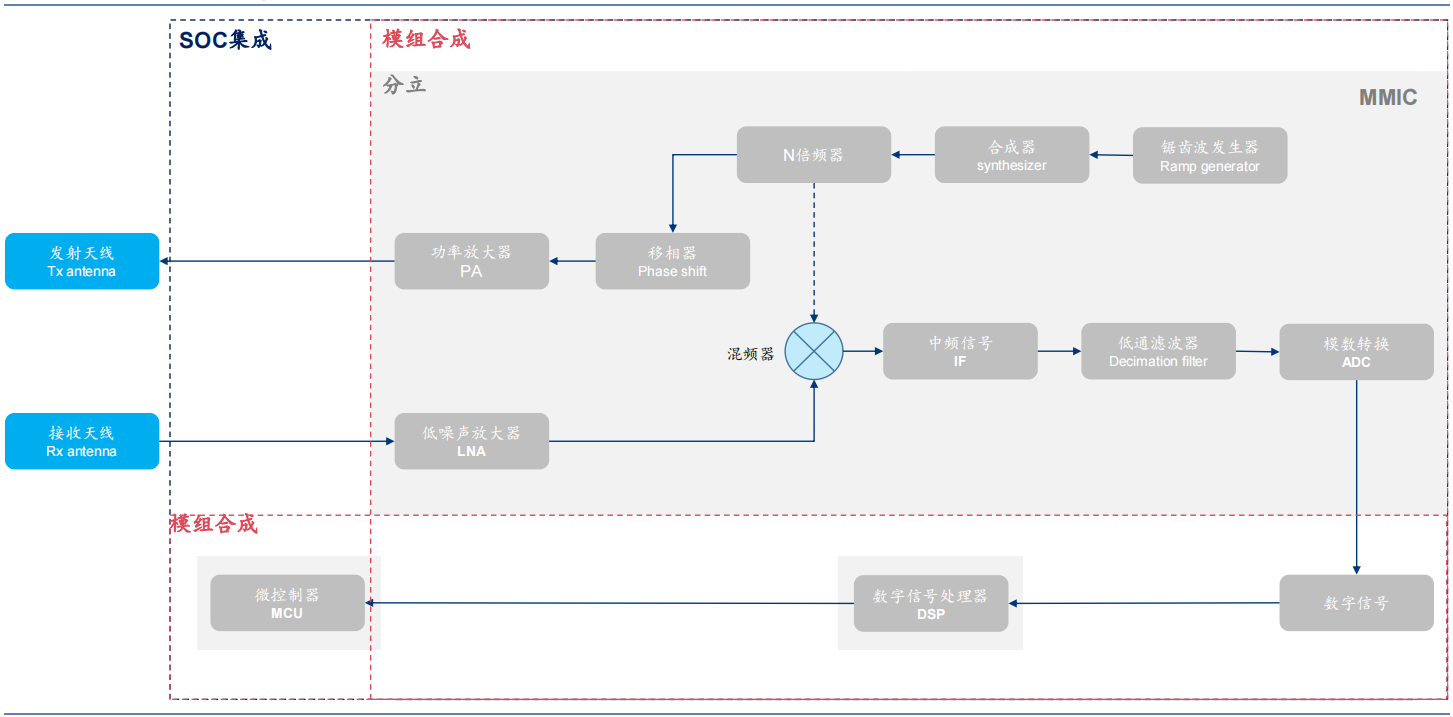
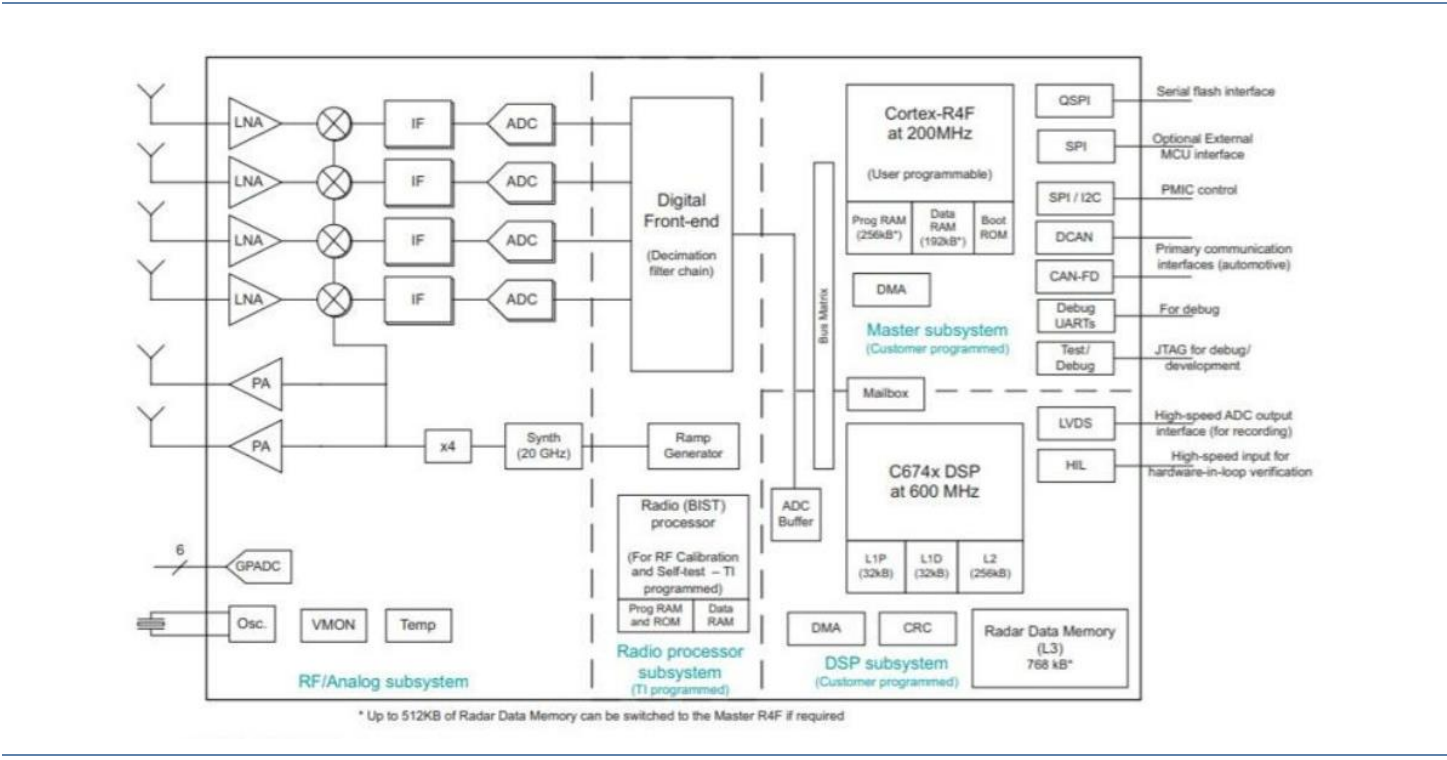
4.3 系统:分立-模块合成-SoC 集成
相关文章:
4D 毫米波雷达:智驾普及的新路径(二)
4 4D 毫米波的技术路线探讨 4.1 前端收发模块 MMIC:级联、CMOS、AiP 4.1.1 设计:级联、单芯片、虚拟孔径 4D 毫米波雷达的技术路线主要分为三种,分别是多级联、级联 虚拟孔径成像技术、以及 集成芯片。( 1 )多级…...

element plus自定义组件表单校验
方式一: import { formContextKey, formItemContextKey } from "element-plus";// 获取 el-form 组件上下文 const formContext inject(formContextKey, void 0); // 获取 el-form-item 组件上下文 const formItemContext inject(formItemContextKey, …...
函数,以将字符串s倒置。)
C //练习 4-13 编写一个递归版本的reverse(s)函数,以将字符串s倒置。
C程序设计语言 (第二版) 练习 4-13 练习 4-13 编写一个递归版本的reverse(s)函数,以将字符串s倒置。 注意:代码在win32控制台运行,在不同的IDE环境下,有部分可能需要变更。 IDE工具:Visual S…...
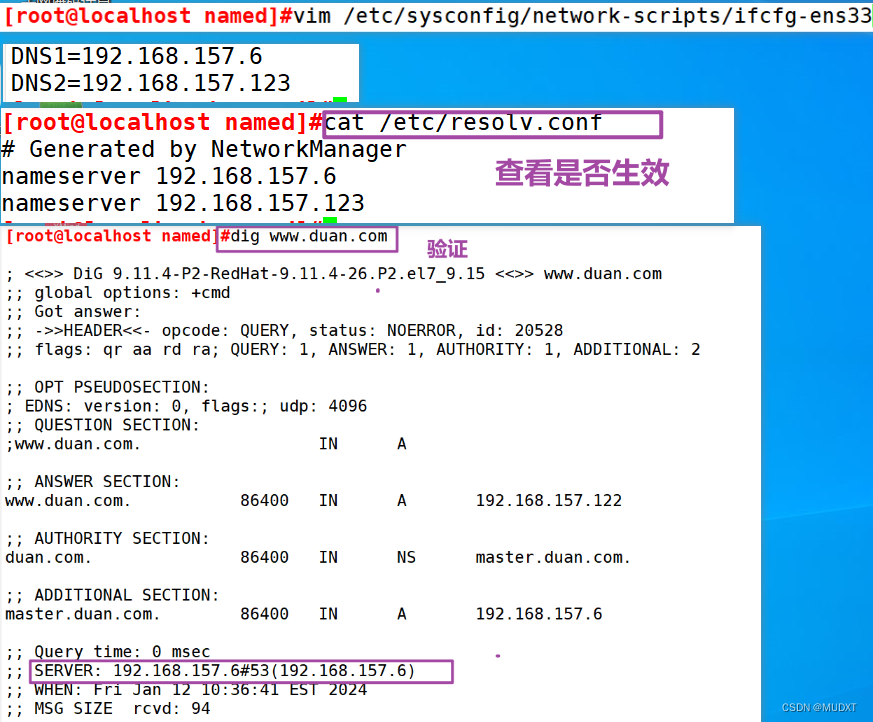
DNS解析和主从复制
一、DNS名称解析协议 二、DNS正向解析 三、DNS主从复制 主服务器 从服务器...
光猫(无限路由器)插入可移动硬盘搭建简易版的NAS
1.场景分析 最近查询到了许多有关NAS的资料,用来替代百度云盘等确实有很多优势,尤其是具有不限速(速度看自己配置)、私密性好、一次投入后续只需要电费即可等优势。鉴于手上没有可以用的资源-cpu、机箱、内存等,查询到…...

SpringIOC之support模块GenericGroovyApplicationContext
博主介绍:✌全网粉丝5W,全栈开发工程师,从事多年软件开发,在大厂呆过。持有软件中级、六级等证书。可提供微服务项目搭建与毕业项目实战,博主也曾写过优秀论文,查重率极低,在这方面有丰富的经验…...

Awesome 3D Gaussian Splatting Resources
GitHub - MrNeRF/awesome-3D-gaussian-splatting: Curated list of papers and resources focused on 3D Gaussian Splatting, intended to keep pace with the anticipated surge of research in the coming months. 3D Gaussian Splatting简明教程 - 知乎...
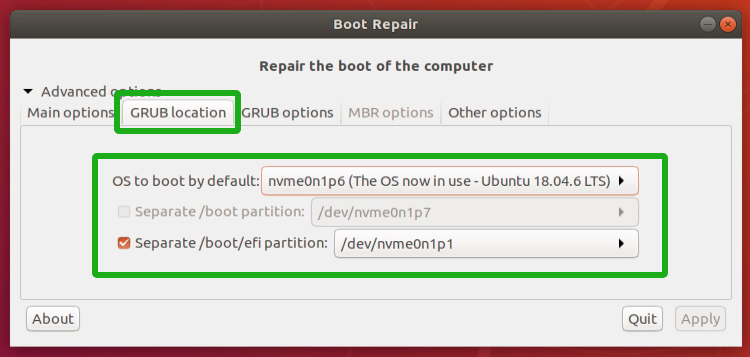
【镜像压缩】linux 上 SD/TF 卡镜像文件压缩到实际大小的简单方法(树莓派、nvidia jetson)
文章目录 1. 备份 SD/TF 卡为镜像文件2. 压缩镜像文件2.1. 多分区镜像文件的压缩(树莓派、普通 linux 系统等)2.2. 单分区镜像文件的压缩(Nvidia Jetson Nano 等) 3. 还原镜像文件到 SD/TF 卡4. 镜像还原后处理4.1. 镜像分区调整4…...
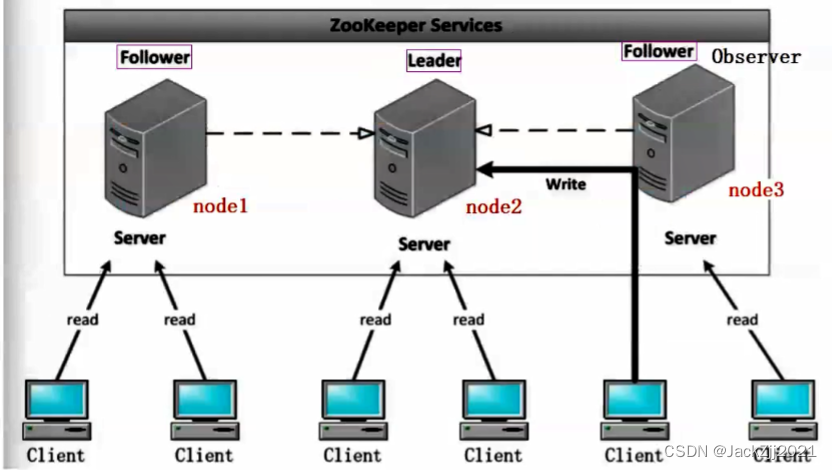
Zookeeper 和 naocs的区别
Nacos 和 ZooKeeper 都是服务发现和配置管理的工具,它们的主要区别如下:功能特性:Nacos 比 ZooKeeper 更加强大,Nacos 支持服务发现、动态配置、流量管理、服务治理、分布式事务等功能,而 ZooKeeper 主要用于分布式协调…...
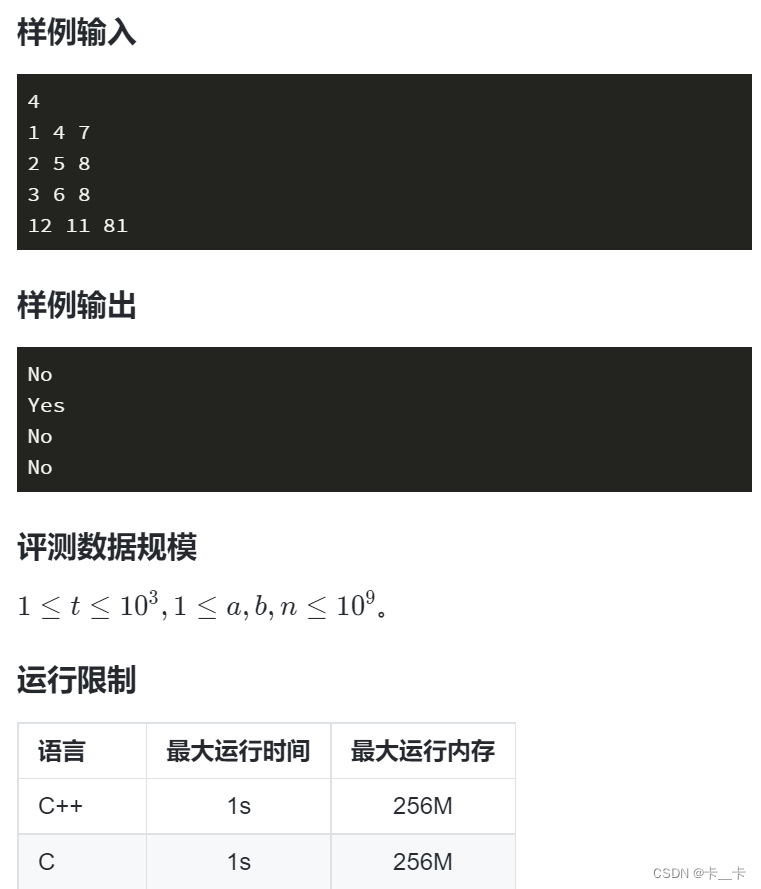
2-6基础算法-快速幂/倍增/构造
文章目录 一.快速幂二.倍增三.构造 一.快速幂 快速幂算法是一种高效计算幂ab的方法,特别是当b非常大时。它基于幂运算的性质,将幂运算分解成一系列的平方操作,以此减少乘法的次数。算法的核心在于将指数b表示为二进制形式,并利用…...

行业内参~移动广告行业大盘趋势-2023年12月
前言 2024年,移动广告的钱越来越难赚了。市场竞争激烈到前所未有的程度,小型企业和独立开发者在巨头的阴影下苦苦挣扎。随着广告成本的上升和点击率的下降,许多原本依赖广告收入的创业者和自由职业者开始感受到前所未有的压力。 dz…...

【笔记】书生·浦语大模型实战营——第四课(XTuner 大模型单卡低成本微调实战)
【参考:tutorial/xtuner/README.md at main InternLM/tutorial】 【参考:(4)XTuner 大模型单卡低成本微调实战_哔哩哔哩_bilibili-【OpenMMLab】】 总结 学到了 linux系统中 tmux 的使用 了解了 XTuner 大模型微调框架的使用 pth格式参数转Hugging …...

开源的Immich自建一个堪比 iCloud 的私有云相册和备份服务
源码地址 GitHub - immich-app/immich: Self-hosted photo and video backup solution directly from your mobile phone. 1.创建目录 mkdir /data/immich && cd /data/immich 2.下载docker-compose文件和.env文件 wget https://github.com/immich-app/immich/relea…...
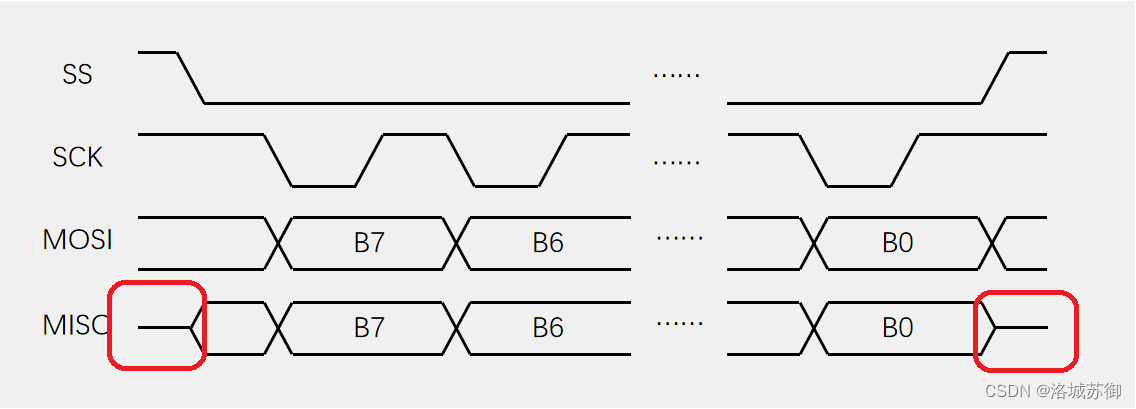
SPI通信讲解
了解SPI通信对于我们了解通信有非常重要的意义。 SPI(Serial Peripheral Interface)是由Motorola公司(摩托罗拉)开发的一种通用数据总线 四根通信线: SCK(Serial Clock):时钟线&a…...
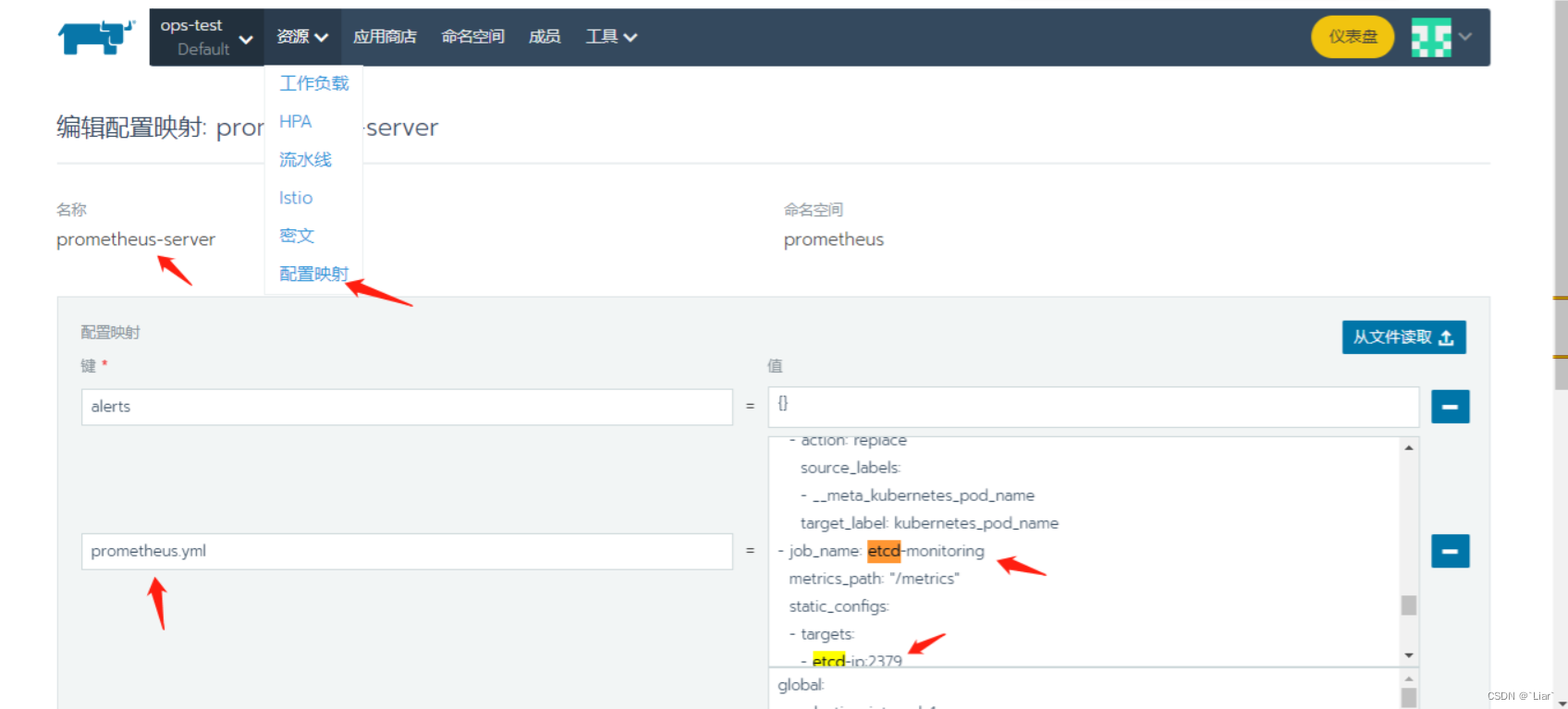
本地一键部署grafana+prometheus
本地k8s集群内一键部署grafanaprometheus 说明: 此一键部署grafanaPrometheus已包含: victoria-metrics 存储prometheus-servergrafanaprometheus-kube-state-metricsprometheus-node-exporterblackbox-exporter grafana内已导入基础的dashboard【7个…...

NIO核心依赖多路复用小记
NIO允许一个线程同时处理多个连接,而不会因为一个连接的阻塞而导致其他连接被阻塞。核心是依赖操作系统的多路复用机制。 操作系统的多路复用机制 多路复用是一种操作系统的 I/O 处理机制,允许单个进程(或线程)同时监视多个输入…...

如何彻底卸载 Microsoft Edge?
关闭 Microsoft Edge 浏览器和所有正在运行的进程。 按下 Ctrl Shift Esc 键打开任务管理器。在任务管理器中,找到所有正在运行的 Microsoft Edge 进程。右键单击每个进程,然后选择“结束任务”。 导航至 Microsoft Edge 的安装目录。 默认情况下&…...

JavaScript-对象-笔记
1.字面量创建对象、对象的使用 对象就是一组 属性和方法的集合 属性: 特征 相当于变量 静态 是什么 方法: 行为 相当于函数 动态 干什么 创建对象 创建对象的第一种:使用字面量 {} 对象中的元素是键值对 使用逗号隔开 键:值 的形式 var 对象名…...
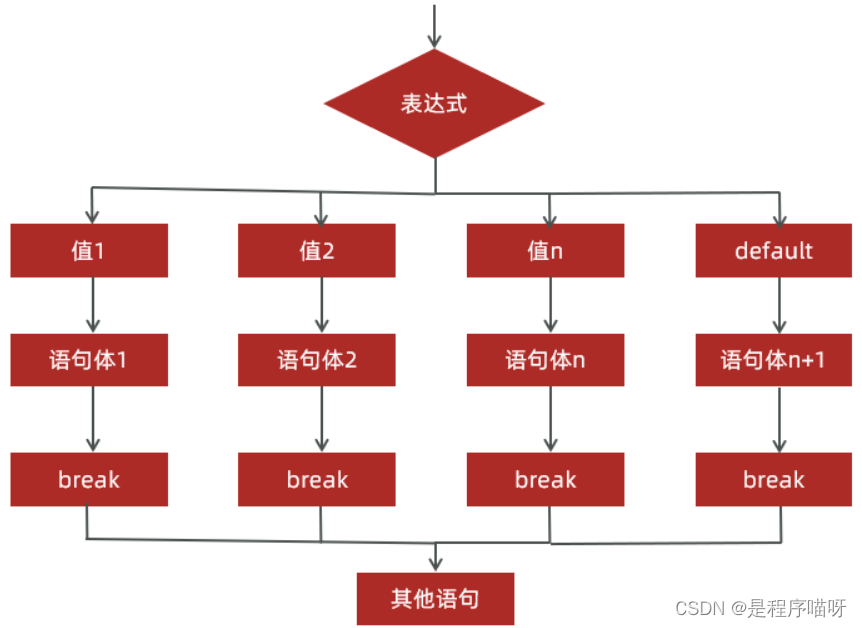
java 运算符 选择语句
1:运算符 运算符:对字面量或者变量进行操作的符号 表达式:用运算符把字面量或者变量连接起来符合java语法的式子就可以称为表达式。不同运算符连接的表达式体现的是不同类型的表达式。 举例说明:** int a 10; int b 20; in…...
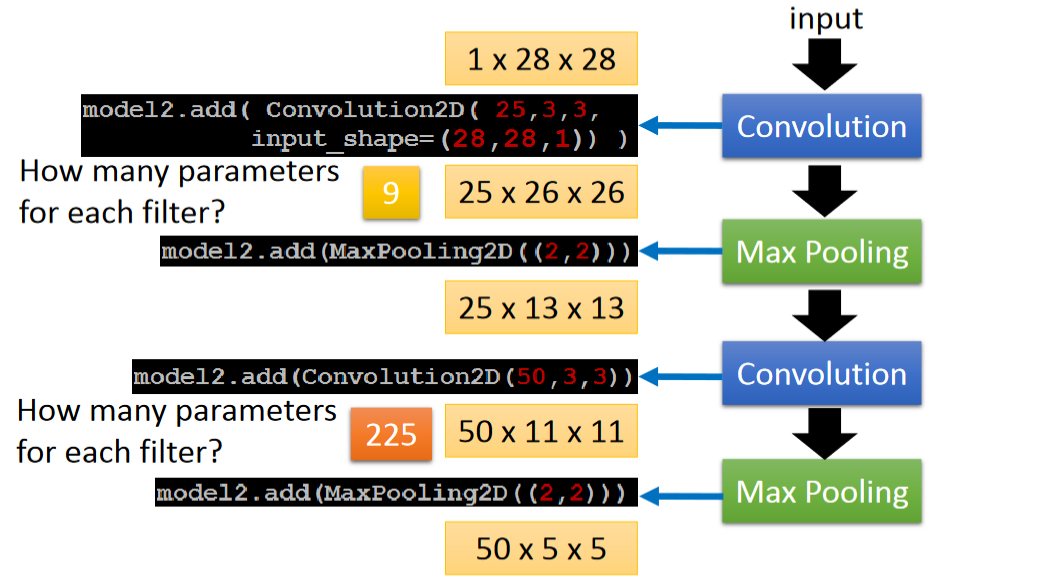
CNN:Convolutional Neural Network(上)
目录 1 为什么使用 CNN 处理图像 2 CNN 的整体结构 2.1 Convolution 2.2 Colorful image 3 Convolution v.s. Fully Connected 4 Max Pooling 5 Flatten 6 CNN in Keras 原视频:李宏毅 2020:Convolutional Neural Network 1 为什么使用…...

中老年人腰椎退行性病变,养护比治疗更重要
随着年龄增长,人体骨骼、关节会逐渐老化,腰椎退行性病变成为中老年人的常见问题,主要表现为腰椎间盘退变、椎间隙狭窄、骨质增生、腰椎不稳等,可引发腰部疼痛、下肢麻木、活动受限等症状,严重影响中老年人的生活质量。…...

全栈实战应用:基于快马AI快速构建带投稿审稿系统的《构石》期刊官网
全栈实战应用:基于快马AI快速构建带投稿审稿系统的《构石》期刊官网 最近接手了一个学术期刊官网的开发需求,需要实现完整的在线投稿和审稿流程。这个项目涉及前后端联调和数据库设计,正好可以试试用InsCode(快马)平台来快速搭建原型。下面分…...

Mac用户必看:OpenClaw一键安装百川2-13B-4bits量化模型指南
Mac用户必看:OpenClaw一键安装百川2-13B-4bits量化模型指南 1. 为什么选择这个组合? 上周我在调试一个自动化文档处理流程时,发现常规的7B模型在处理复杂表格时经常漏掉关键字段。在测试了多个开源模型后,百川2-13B的表格理解能…...

STM32CubeIDE实战:HAL库串口中断接收的5个常见坑点及解决方案
STM32CubeIDE实战:HAL库串口中断接收的5个常见坑点及解决方案 在工业传感器数据采集、设备间通信等场景中,稳定可靠的串口通信往往是嵌入式开发的关键环节。许多开发者在使用STM32CubeIDE配合HAL库实现串口中断接收时,虽然能够快速搭建基础功…...

如何彻底掌控Windows Defender:终极禁用与启用指南
如何彻底掌控Windows Defender:终极禁用与启用指南 【免费下载链接】defender-control An open-source windows defender manager. Now you can disable windows defender permanently. 项目地址: https://gitcode.com/gh_mirrors/de/defender-control 你是…...

Unity IL2CPP热更新实战:动态库与global-metadata.dat的无缝替换方案
1. IL2CPP热更新的核心挑战 在移动游戏开发中,热更新能力直接决定了产品的运维效率和用户体验。传统的Mono运行时支持Assembly动态加载,而IL2CPP作为Unity的AOT编译方案,将C#代码转换为C后编译为原生二进制,这带来了性能提升却牺…...

BERT文本分割-中文-通用领域开发者指南:源码路径/usr/local/bin/webui.py解析
BERT文本分割-中文-通用领域开发者指南:源码路径/usr/local/bin/webui.py解析 1. 项目简介 随着在线教学、远程会议等应用的普及,口语化文档的数量正在快速增长。这些文档通常以会议记录、讲座内容、采访稿等形式存在。但通过自动语音识别系统生成的文…...

Wasmtime代码缓存机制:提升WebAssembly执行性能的终极指南
Wasmtime代码缓存机制:提升WebAssembly执行性能的终极指南 【免费下载链接】wasmtime A fast and secure runtime for WebAssembly 项目地址: https://gitcode.com/gh_mirrors/wa/wasmtime Wasmtime作为一款快速且安全的WebAssembly运行时,其代码…...

突破硬件枷锁:OptiScaler开源解决方案让所有设备都能享受AI超分辨率技术
突破硬件枷锁:OptiScaler开源解决方案让所有设备都能享受AI超分辨率技术 【免费下载链接】OptiScaler DLSS replacement for AMD/Intel/Nvidia cards with multiple upscalers (XeSS/FSR2/DLSS) 项目地址: https://gitcode.com/GitHub_Trending/op/OptiScaler …...

告别繁琐计算!MAA智能公招助手:一键解锁明日方舟高效标签组合方案
告别繁琐计算!MAA智能公招助手:一键解锁明日方舟高效标签组合方案 【免费下载链接】MaaAssistantArknights 一款明日方舟游戏小助手 项目地址: https://gitcode.com/GitHub_Trending/ma/MaaAssistantArknights MAA智能公招助手是明日方舟游戏小助…...