多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测
多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测
目录
- 多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测
- 效果一览
- 基本介绍
- 程序设计
- 参考资料
效果一览





基本介绍
1.Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测(完整源码和数据)
2.运行环境为Matlab2023b;
3.excel数据集,输入多个特征,输出单个变量,考虑历史特征的影响,多变量时间序列预测,main.m为主程序,运行即可,所有文件放在一个文件夹;
4.命令窗口输出R2、MAE、 MBE、MAPE、 RMSE多指标评价。
程序设计
- 完整源码和数据获取方式私信回复Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测。
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行%% 导入数据
res =xlsread('data.xlsx','sheet1','A2:H104');%% 数据分析
num_size = 0.7; % 训练集占数据集比例num_train_s = round(num_size * num_samples); % 训练集样本个数
f_ = size(res, 2) - outdim; % 输入特征维度%% 划分训练集和测试集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);f_ = size(P_train, 1); % 输入特征维度%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);[t_train, ps_output] = mapminmax(T_train, 0, 1);
t_test = mapminmax('apply', T_test, ps_output);参考资料
[1] https://blog.csdn.net/kjm13182345320/article/details/129215161
[2] https://blog.csdn.net/kjm13182345320/article/details/128105718
相关文章:
多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测
多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测 目录 多维时序 | Matlab实现GRO-CNN-LSTM-Attention淘金算法优化卷积神经网络-长短期记忆网络结合注意力机制多变量时间序列预测效果一览基本介绍程序设…...

SQL-DQL-基础查询
🎉欢迎您来到我的MySQL基础复习专栏 ☆* o(≧▽≦)o *☆哈喽~我是小小恶斯法克🍹 ✨博客主页:小小恶斯法克的博客 🎈该系列文章专栏:重拾MySQL 🍹文章作者技术和水平很有限,如果文中出现错误&am…...
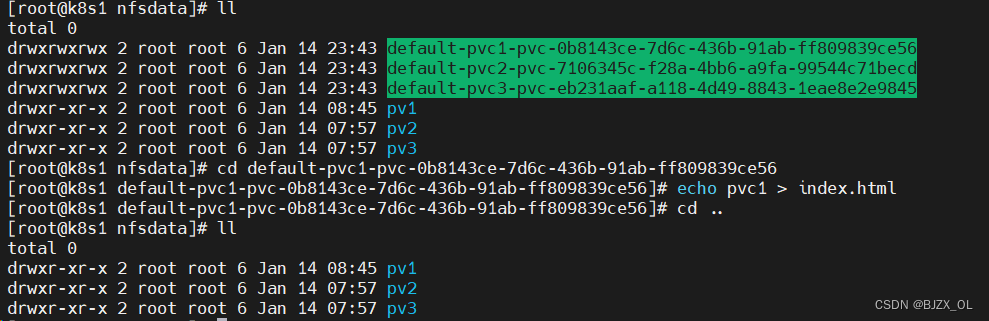
Kubernetes (十三) 存储——持久卷-动静态分配
一. 简介 二. NFS持久化存储步骤(静态分配) 1. 集群外…...
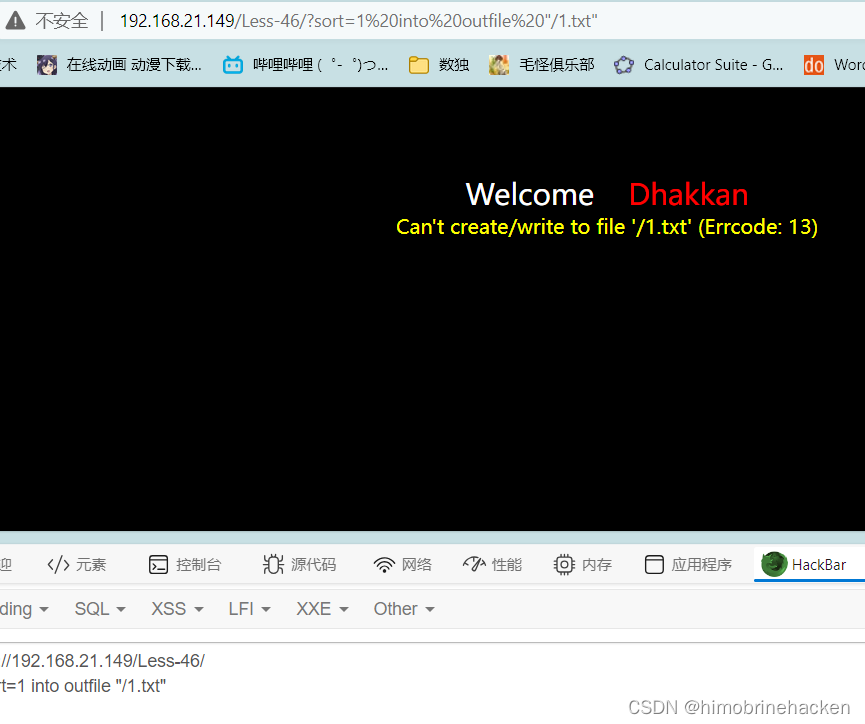
order by之后的injection(sqllabs第四十六关)
order by相关注入知识 这一关的sql语句是利用的order by 根据输入的id不同数据排序不一样可以确定就是order by order by后面无法使用ubion注入(靠找不到) 可以利用后面的参数进行攻击 1)数字 没作用考虑布尔类型 rand和select ***都可以 …...

C++ 树与图的广度优先遍历 || 模版题 :图中点的层次
给定一个 n 个点 m 条边的有向图,图中可能存在重边和自环。 所有边的长度都是 1 ,点的编号为 1∼n 。 请你求出 1 号点到 n 号点的最短距离,如果从 1 号点无法走到 n 号点,输出 −1 。 输入格式 第一行包含两个整数 n 和 m 。 …...
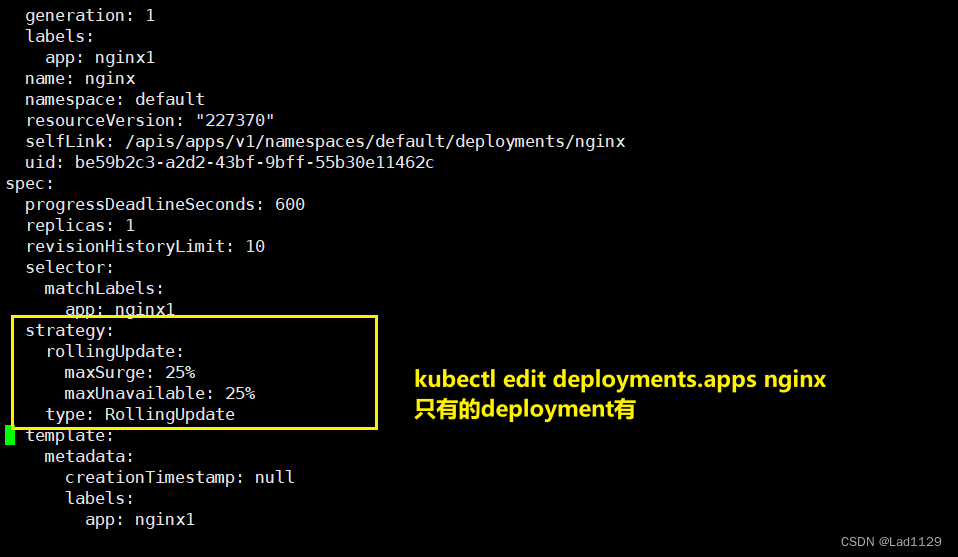
k8s---pod控制器
pod控制器发的概念: 工作负载,workload用于管理pod的中间层,确保pod资源符合预期的状态。 预期状态: 1、副本数 2、容器重启策略 3、镜像拉取策略 pod出故障的出去等等 pod控制器的类型: 1、replicaset…...

2024.1.11力扣每日一题——构造有效字符串的最少插入数
2024.1.11 题目来源我的题解方法一 暴力模拟方法二 动态规划方法三 直接拼接方法四 计算组数 题目来源 力扣每日一题;题序:2645 我的题解 方法一 暴力模拟 直接模拟,根据题意可知 若是abc则不用插入,若是ab,ac,bc这需要 插入一…...

软件测试|如何使用Selenium处理隐藏元素
简介 我们在使用selenium进行web自动化测试时,有时候会遇到元素被隐藏,从而无法对元素进行操作,导致我们的用例报错的情况。当我们遇到元素被隐藏的情况时,需要先对隐藏的元素进行处理,才能继续进行我们的操作&#x…...
第三次面试总结 - 吉云集团 - 全栈开发
🧸欢迎来到dream_ready的博客,📜相信您对专栏 “本人真实面经” 很感兴趣o (ˉ▽ˉ;) 专栏 —— 本人真实面经,更多真实面试经验,中大厂面试总结等您挖掘 目录 总结(非详细) 面试内…...
buuctf-Misc 题目解答分解118-120
118.[INSHack2017]sanity 打开压缩包就是一个md 文件 typora 打开 发现flag INSA{Youre_sane_Good_for_you} 119.粽子的来历 解压压缩包 ,得到文件夹如下 用010 editor 打开 我是A.doc 这个有些可以 都改成FF 保存 然后再次打开 docx 文件就发现了屈原的诗 其他b…...

Hive数据定义(1)
hive数据定义是hive的基础知识,所包含的知识点有:数据仓库的创建、数据仓库的查询、数据仓库的修改、数据仓库的删除、表的创建、表的删除、内部表、外部表、分区表、桶表、表的修改、视图。本篇文章先介绍:数据仓库的创建、数据仓库的查询、…...
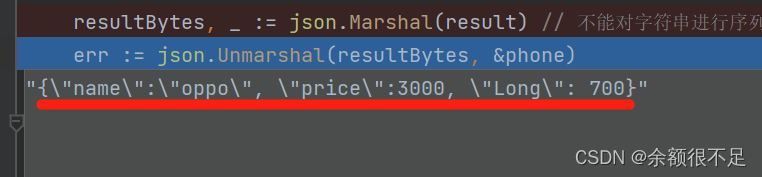
golang 反序列化出现json: cannot unmarshal string into Go value of type model.Phone
项目场景: 今天在项目公关的过程中,需要对interface{}类型进行转换为具体结构体 问题描述 很自然的用到了resultBytes, _ : json.Marshal(result),然后对resultBytes进行反序列化转换为对应的结构体err : json.Unmarshal(resultBytes, &…...
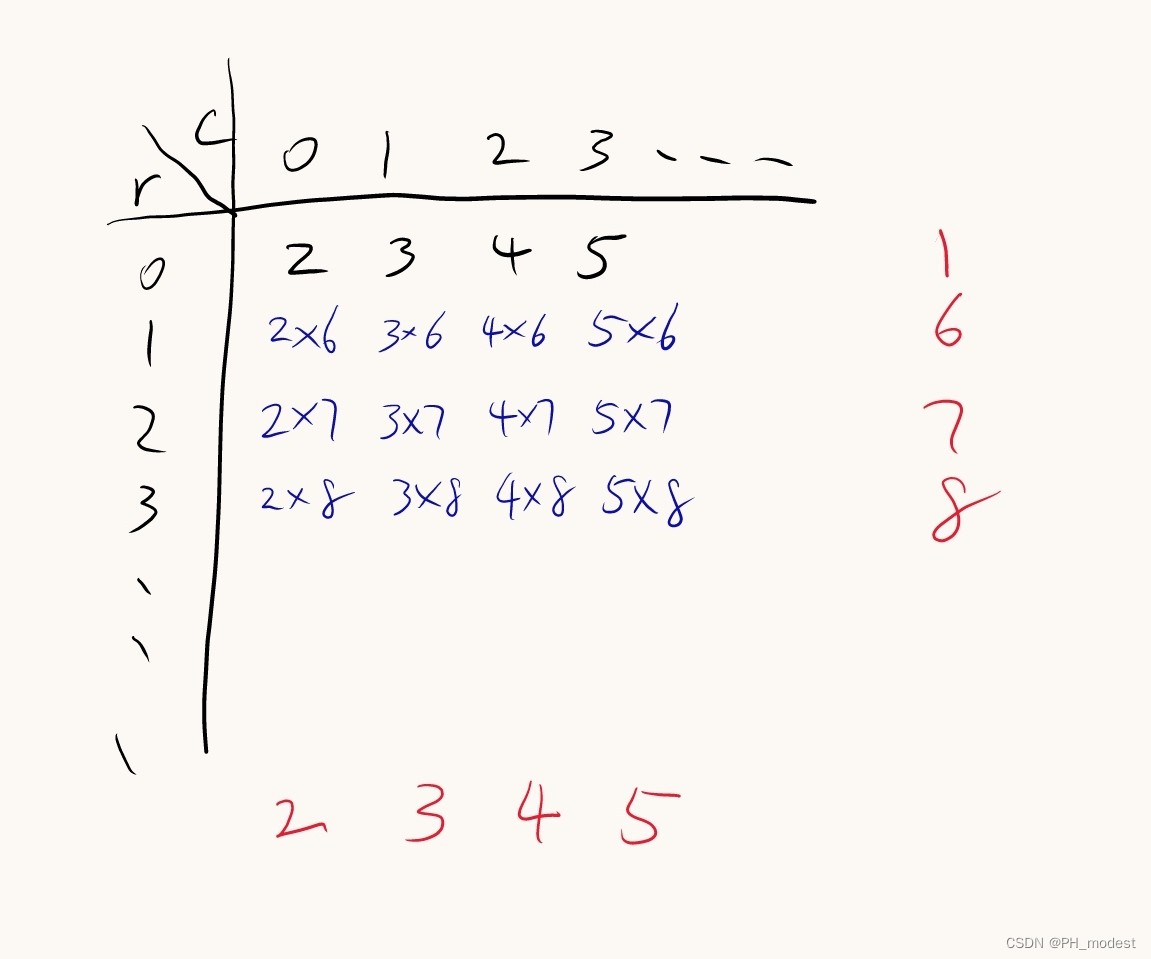
【闯关练习】—— 1400分(构造)
🌏博客主页:PH_modest的博客主页 🚩当前专栏:cf闯关练习 💌其他专栏: 🔴每日一题 🟡 C跬步积累 🟢 C语言跬步积累 🌈座右铭:广积粮,缓…...

Qt QProgressBar进度条控件
文章目录 1 属性和方法1.1 值1.2 方向1.3 外观1.4 信号和槽 2 实例2.1 布局2.2 代码实现 QProgressBar是进度条控件,进度条用来指示任务的完成情况 1 属性和方法 QProgressBar有很多属性,完整的可查看帮助文档。这里以QProgressBar为例,列出…...
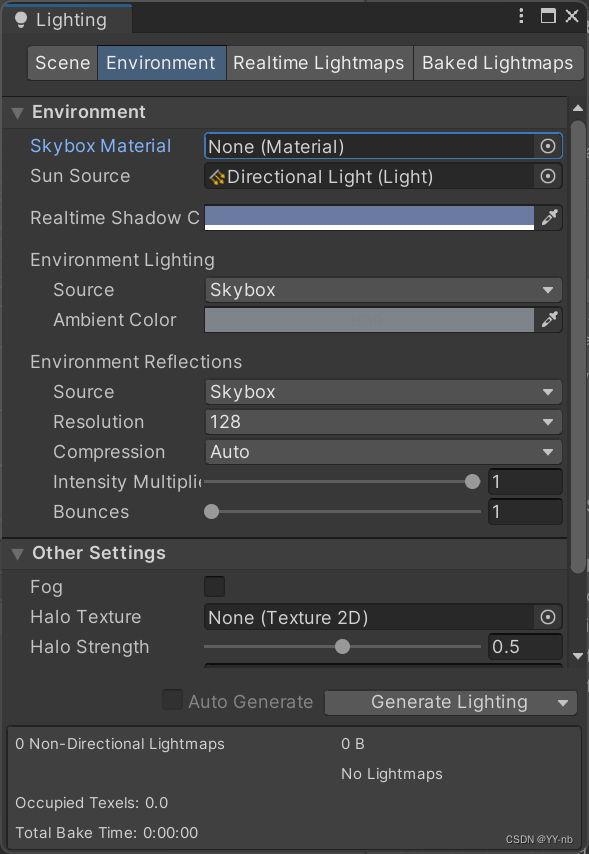
【新】Unity Meta Quest MR 开发(一):Passthrough 透视配置
文章目录 📕教程说明📕配置透视的串流调试功能📕第一步:设置 OVRManager📕第二步:添加 OVRPassthroughLayer 脚本📕第三步:在场景中添加虚拟物体📕第四步:设置…...

快速排序【hoare版本】【挖坑法】【双指针法】(数据结构)
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法,其基本思想为:任取待排序元素序列中 的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均…...
class_5:在c++中一个类包含另一个类的对象叫做组合
#include <iostream> using namespace std;class Wheel{ public://成员数据string brand; //品牌int year; //年限//真正的成员函数void printWheelInfo(); //声明成员函数 };void Wheel::printWheelInfo() {cout<<"我的轮胎品牌是:"<…...

Linux - No space left on device
问题描述 No space left on device 原因分析 说明在服务器设备上的存储空间已经满了,不能再上传或者新建文件夹或者文件等。 解决方案 确认查看服务器系统的磁盘使用情况是否是真的已经没有剩余空间,复制下面命令在服务器上运行,然后发现如果…...
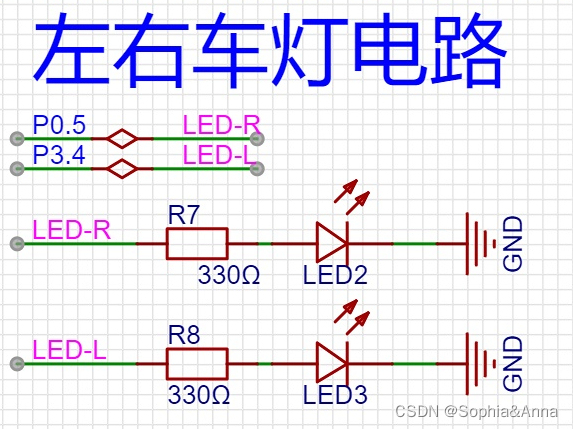
STC8H8K蓝牙智能巡线小车——2. 点亮左右转弯灯与危险报警灯
任务调用示例 RTX 51 TNY 可做多任务调度,API较为简单。 /* 接口API */// 创建任务 extern unsigned char os_create_task (unsigned char task_id); // 结束任务 extern unsigned char os_delete_task (unsigned char task_id);// 等待 extern unsig…...
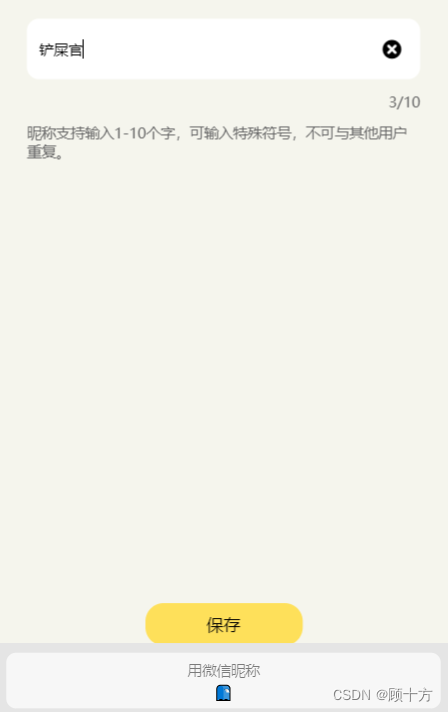
【微信小程序独立开发 3】个人资料页面编写
这一节完成用户个人信息昵称的填写和获取 上节编写完成后的页面如下所示: 首先进行用户昵称编辑功能的编写,铲屎官昵称采用了navigator标签,当点击昵称时会自动跳转到昵称编辑页面。 首先输入昵称编辑界面的导航栏名称 {"usingCompone…...

3个步骤解决Mac Boot Camp驱动部署难题:Brigadier自动化方案详解
3个步骤解决Mac Boot Camp驱动部署难题:Brigadier自动化方案详解 【免费下载链接】brigadier Fetch and install Boot Camp ESDs with ease. 项目地址: https://gitcode.com/gh_mirrors/bri/brigadier 还在为Mac电脑安装Windows系统后的驱动问题而烦恼吗&…...

Windows 10终极PL2303驱动修复指南:让老旧串口设备重获新生
Windows 10终极PL2303驱动修复指南:让老旧串口设备重获新生 【免费下载链接】pl2303-win10 Windows 10 driver for end-of-life PL-2303 chipsets. 项目地址: https://gitcode.com/gh_mirrors/pl/pl2303-win10 还在为Windows 10系统下的PL2303串口设备无法正…...
·面经深度解析)
前端八股文面经大全:上海威派格前端实习(2026-05-07)·面经深度解析
前言 大家好,我是木斯佳。 相信很多人都感受到了,在AI浪潮的席卷之下,前端领域的门槛在变高,纯粹的“增删改查”岗位正在肉眼可见地减少。曾经热闹非凡的面经分享,如今也沉寂了许多。但我们都知道,市场的…...

企业内如何通过 Taotoken 实现 API 访问权限的精细化控制与审计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内如何通过 Taotoken 实现 API 访问权限的精细化控制与审计 当企业将大模型能力引入内部工作流时,如何安全、可控地…...

【AI面试临阵磨枪-54】如何监控 AI 系统:成功率、延迟、Token 消耗、幻觉率、调用量
一、 面试题目面试官提问: “在大规模 Agent 系统中,你是如何建立监控体系的?请针对 成功率、延迟、Token 消耗、幻觉率、调用量 这五个核心指标,详细谈谈你的采集、分析与预警方案。”二、 知识储备1. 核心背景:AI 监…...

ROS2导航SLAM建图实战:从Gazebo仿真到真实地图构建
1. 环境准备与基础配置 第一次接触ROS2导航和SLAM建图的朋友可能会觉得配置环境很复杂,其实只要跟着步骤一步步来,半小时就能搞定。我用的是一台装了Ubuntu 20.04的笔记本,ROS2版本选择Foxy,这个组合最稳定。记得先更新系统&#…...

AI伦理实战:从偏见、可解释性到隐私保护的工程化解决方案
1. 项目概述:当AI从实验室走向现实,我们面临什么?几年前,我还在实验室里为一个模型的准确率提升0.5个百分点而兴奋不已。那时,“伦理”这个词,对我们这些埋头调参的工程师来说,似乎还停留在哲学…...

稀疏结式与动作矩阵:视觉几何求解器中的等价性证明
1. 项目概述:从视觉几何到代数求解的桥梁 在计算机视觉领域,尤其是三维重建、相机标定、姿态估计这些核心任务中,我们常常会遇到一个看似简单、实则棘手的问题:求解一个由多个多项式方程构成的方程组。比如,从两幅图像…...

STC8H8K64U单片机IAP升级实战:从官方例程到自定义协议的完整移植指南
STC8H8K64U单片机IAP升级实战:从官方例程到自定义协议的完整移植指南 在嵌入式系统开发中,固件升级是一个永恒的话题。想象一下这样的场景:你的设备已经部署在客户现场,突然发现了一个需要紧急修复的Bug,或者需要增加新…...

基于双链笔记构建个人消费知识系统:从记录到生活策展
1. 项目概述与核心价值看到“SimonsTang/xiaofei-liberal-arts”这个项目标题,我的第一反应是,这应该是一个关于“消费”与“文科”交叉领域的知识库或工具集。作为一名长期关注效率工具和知识管理的从业者,我深知在信息爆炸的时代࿰…...