机器人持续学习基准LIBERO系列7——计算并可视化点云
0.前置
- 机器人持续学习基准LIBERO系列1——基本介绍与安装测试
- 机器人持续学习基准LIBERO系列2——路径与基准基本信息
- 机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新
- 机器人持续学习基准LIBERO系列4——robosuite最基本demo
- 机器人持续学习基准LIBERO系列5——获取显示深度图
- 机器人持续学习基准LIBERO系列6——获取并显示实际深度图
1.前置代码
- 机器人持续学习基准LIBERO系列6——获取并显示实际深度图
2.重新获取真实深度信息
- 之前的由于要显示,进行了整数化处理,所以重新获取一下原始真实深度信息
from robosuite.utils.camera_utils import get_real_depth_map
agentview_depth_real = get_real_depth_map(env.sim, agentview_depth)
3.获取图像尺寸
h,w = env_args['camera_heights'], env_args['camera_widths']
4.创建像素点序列和颜色序列
i = np.zeros([h*w,2])#(点数,像素点二维坐标)
colors = np.zeros([h*w,3])#(点数,像素点对应的RGB值)
for x in range(h):for y in range(w):i[x*h+y] = [x,y]colors[x*h+y] = agentview_image[x,y]
5.获取相机内外参
- robosuite官方文档有对应函数get_camera_intrinsic_matrix,get_camera_extrinsic_matrix
from robosuite.utils.camera_utils import get_camera_extrinsic_matrix,get_camera_intrinsic_matrixcamera_intrinsic_matrix_ = np.linalg.inv(get_camera_intrinsic_matrix(env.sim,'agentview', env_args['camera_heights'], env_args['camera_widths']))
camera_extrinsic_matrix_ = np.linalg.inv(get_camera_extrinsic_matrix(env.sim,'agentview'))
6.计算世界坐标系下三维点坐标
- 相机内外参使用参考公式
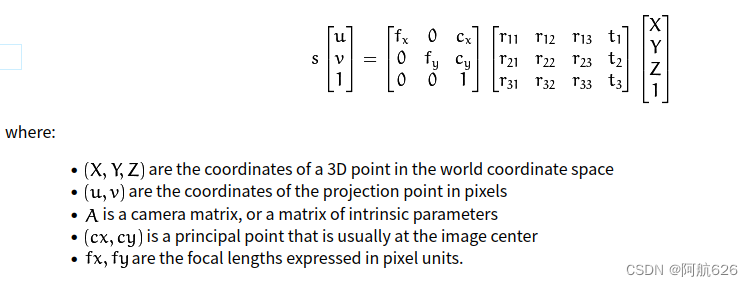
points = np.zeros([i.shape[0],3])
for num,p in enumerate(i):p_ = (camera_intrinsic_matrix_@np.array([[p[0],p[1],1]]).T).Tp_[0,2] = agentview_depth_real[int(p[0]),int(p[1])]p_ = (camera_extrinsic_matrix_@np.array([p_[0,0],p_[0,1],p_[0,2],1]).T).Tpoints[num] = p_[:-1]
print(points)
7.关闭环境
env.close()
- 不关闭环境,就是用open3d显示的话,会报错
X Error of failed request: BadAccess (attempt to access private resource denied)Major opcode of failed request: 152 (GLX)Minor opcode of failed request: 5 (X_GLXMakeCurrent)Serial number of failed request: 183Current serial number in output stream: 183
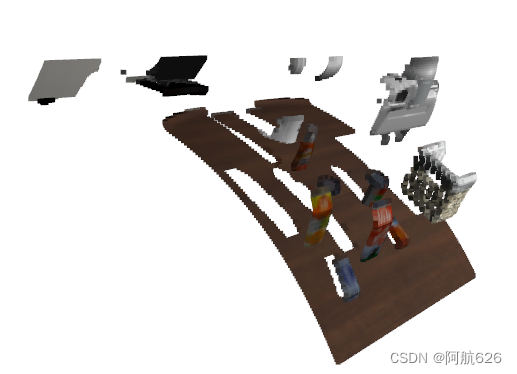
8.open3d显示点云
import open3d as o3d
pcd_show = o3d.geometry.PointCloud()
pcd_show.points = o3d.utility.Vector3dVector(points[:, :3])
pcd_show.colors = o3d.utility.Vector3dVector(colors[:]/255)
o3d.visualization.draw_geometries([pcd_show])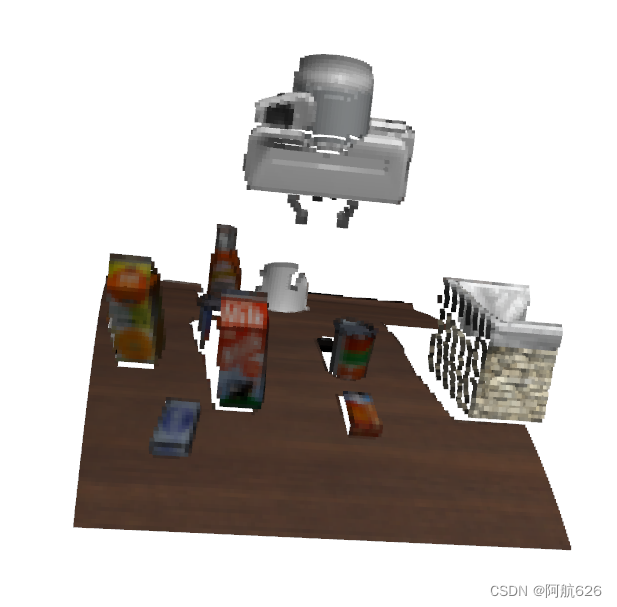
相关文章:
机器人持续学习基准LIBERO系列7——计算并可视化点云
0.前置 机器人持续学习基准LIBERO系列1——基本介绍与安装测试机器人持续学习基准LIBERO系列2——路径与基准基本信息机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新机器人持续学习基准LIBERO系列4——robosuite最基本demo机器人持续学习基准LIBERO系列5——…...
基于 Level set 方法的医学图像分割
摘 要 医学图像分割是计算机辅助诊断系统设计中的关键技术。对于医学图像分割问题,它一般可分为两部分:(l)图像中特定目标区域(器官或组织)的识别;(2)目标区域完整性的描述与提取。相比于其他图像,医学图像的复杂性和多样性,使得传统的基于底层图像信息的分割方法很难取得好的…...

【C++入门】C++ STL中string常用函数用法总结
目录 前言 1. string使用 2. string的常见构造 3. string类对象的访问及遍历 迭代器遍历: 访问: 4. string类对象的容量操作 4.1 size和length 4.2 clear、empty和capacity 4.3 reserve和resize reserve resize 5. string类对象的修改操作 push_back o…...

Rust变量、常量声明与基本数据类型
Rust是一门系统级别的编程语言,注重安全性、性能和并发。在这篇博客中,我们将介绍Rust中的变量、常量声明以及基本数据类型,并通过示例说明每一种类型的用法。 变量声明 在Rust中,使用 let 关键字声明变量。变量默认是不可变的&…...
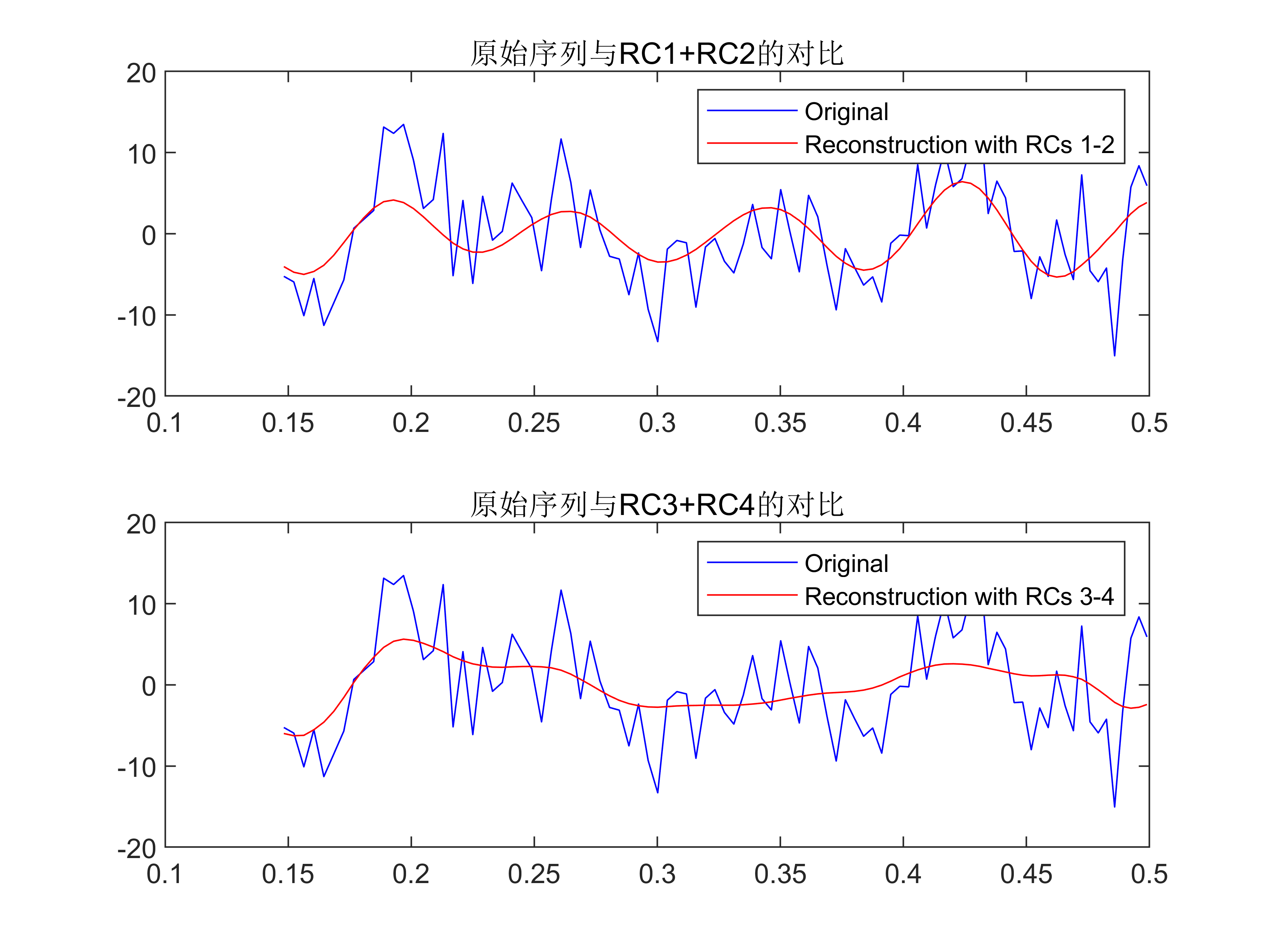
【MATLAB】 SSA奇异谱分析信号分解算法
有意向获取代码,请转文末观看代码获取方式~ 1 基本定义 SSA奇异谱分析(Singular Spectrum Analysis)是一种处理非线性时间序列数据的方法,可以对时间序列进行分析和预测。 它基于构造在时间序列上的特定矩阵的奇异值分解&#…...

Nginx+Tomcat负载均衡、动静分离以及Nginx负载均衡和四层代理
目录 NginxTomcat负载均衡、动静分离 Nginx 负载均衡模式: Nginx 四层代理配置: NginxTomcat负载均衡、动静分离 Nginx 服务器:192.168.80.10:80 Tomcat服务器1:192.168.80.100:80 Tomcat服务器2:192.168.80.101:80…...

Vue3中provide,inject使用
一,provide,inject使用: 应用场景:向孙组件传数据 应用Vue3碎片: ref,reactive,isRef,provide, inject 1.provide,inject使用 a.爷组件引入 import {ref,provide} from vue const drinkListre…...

Django命令模块
这篇文章我们主要来介绍一下关于 Django 的命令模块,我们经常会使用到,比如以下几个常用的命令,都属于 Django 的命令模块: python manage.py makemigrations python manage.py migrate python manage.py startapp python manage…...
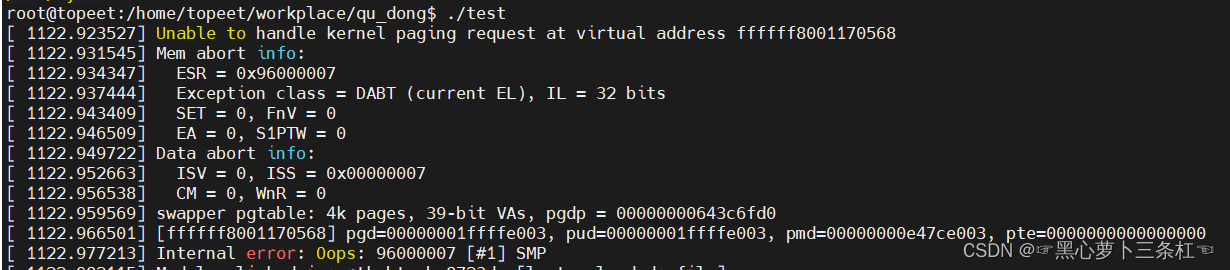
【linux驱动开发】在linux内核中注册一个杂项设备与字符设备以及内核传参的详细教程
文章目录 注册杂项设备驱动模块传参注册字符设备 开发环境: windows ubuntu18.04 迅为rk3568开发板 注册杂项设备 相较于字符设备,杂项设备有以下两个优点: 节省主设备号:杂项设备的主设备号固定为 10,在系统中注册多个 misc 设备驱动时&…...
)
Golang条件编译 | 获取系统的磁盘空间内存占用demo | gopsutil/disk库(跨平台方案)
文章目录 一、Golang条件编译1. 构建标签( Build tags)2. 文件后缀(File suffixes) 二、GO golang 获取磁盘空间 条件编译思路 三、【推荐】使用github.com/shirou/gopsutil/disk这个库,如何获取机器下不同磁盘分区的内容 一、Golang条件编译…...

22/76-池化
池化(最大池化层:选每个kernel中最大的数) 填充、步幅、多个通道: 池化层与卷积层类似,都具有填充和步幅。 没有可学习的参数。 在每个输入通道应用池化层以获得相应的输出通道。 输出通道数输入通道数。 平均池化层…...
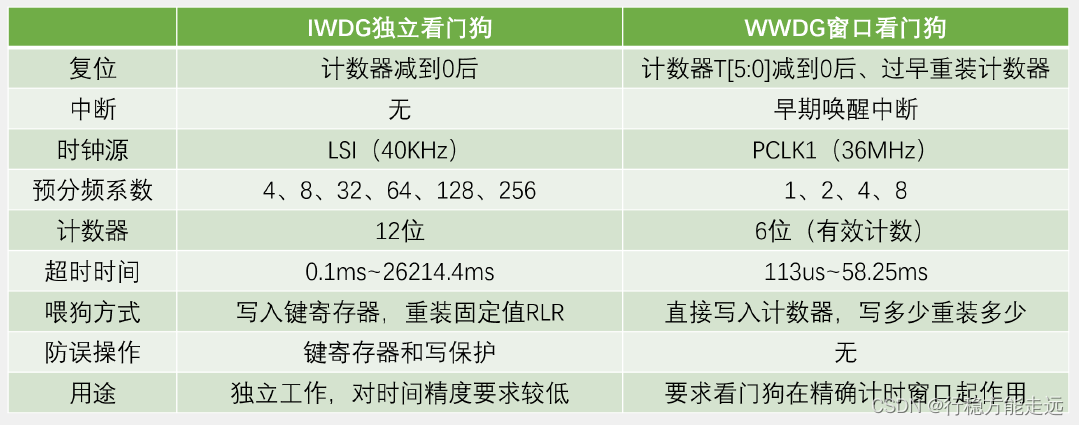
江科大STM32 下
目录 ADC数模转换器DMA直接存储器存取USART串口9-2 串口发送接受9-3 串口收发HEX数据包 I2C(mpu6050陀螺仪和加速度计)SPI协议10.1 SPI简介W25Q64简介10.3 SPI软件读写W25Q6410.4 SPI硬件读写W25Q64 BKP、RTC11.0 Unix时间戳11.1 读写备份寄存器BKP11.2 RTC实时时钟 十二、PWR1…...
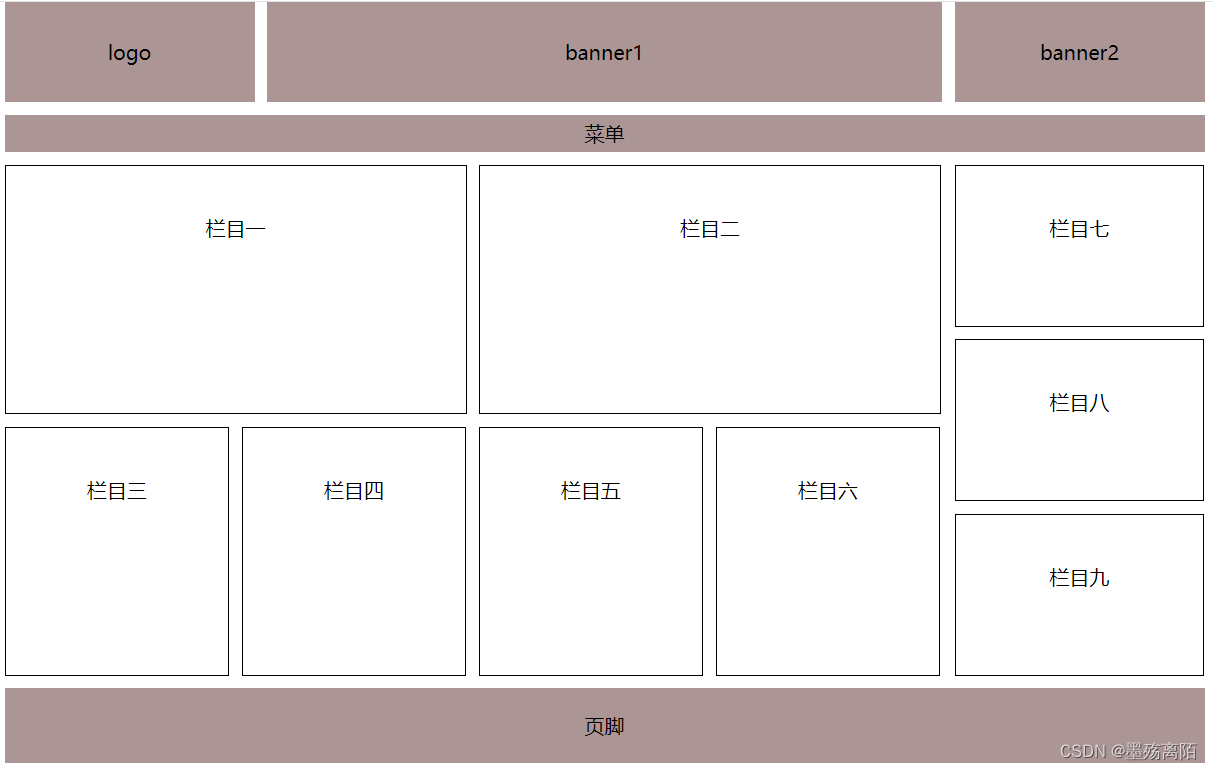
利用HTML和CSS实现的浮动布局
代码如下 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title><style>*{m…...

2024年第十届控制、自动化与机器人国际会议(ICCAR 2024)即将召开!
2024年4月27~29日 新加披 会议官网:10th-ICCAR 2024https://iccar.org/index.html 第十届控制、自动化和机器人国际会议将于2024年4月27-29日在新加坡举办。本次会议由新加坡电子学会,IEEE机器人和自动控制协会和IEEE联合主办,并得到北京航空…...
基于python集成学习算法XGBoost农业数据可视化分析预测系统
文章目录 基于python集成学习算法XGBoost农业数据可视化分析预测系统一、项目简介二、开发环境三、项目技术四、功能结构五、功能实现模型构建封装类用于网格调参训练模型系统可视化数据请求接口模型评分 0.5*mse 六、系统实现七、总结 基于python集成学习算法XGBoost农业数据可…...
第29集《佛法修学概要》
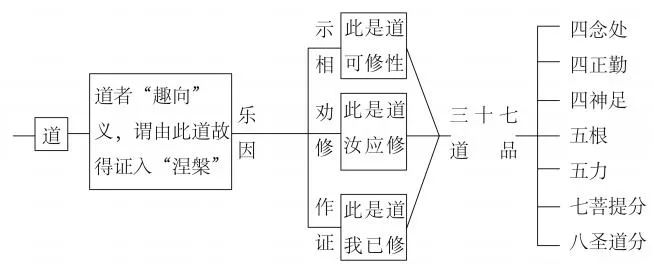
丁三、声闻乘 分二:戊一、释义;戊二、四谛法;戊三、结示 请大家打开讲义第八十二页。我们看丁三,声闻乘。 在祖师大德的判教当中,把我们整个大乘的成佛之道分成了三个部分:第一个是安乐道,第…...

奥伦德光电耦合器5G通信领域及其相关领域推荐
光电耦合器是以光为媒介传输电信号的一种电-光-电转换器件。由于该器件使用寿命长、工作温度范围宽,所以在过程控制、工业通信、家用电器、医疗设备、通信设备、计算机以及精密仪器等方面有着广泛应用在当前工艺技术持续发展与提升的过程中,其工作速度、…...

机器学习算法 - 马尔可夫链
马尔可夫链(Markov Chain)可以说是机器学习和人工智能的基石,在强化学习、自然语言处理、金融领域、天气预测、语音识别方面都有着极其广泛的应用 > The future is independent of the past given the present 未来独立于过去ÿ…...

Linux下防火墙相关命令整理
目录 一.前言二.相关命令整理 一.前言 这篇文章简单整理一下Linux系统中防火墙相关命令。 二.相关命令整理 开启防火墙 systemctl start firewalld关闭防火墙 systemctl stop firewalld重启防火墙 systemctl restart firewalld开机启用防火墙 systemctl enable firewall…...

Python八股文总结
一. Python基本数据结构有哪四种?区别是什么? 列表(List)元组(Tuple)字典(Dictionary)集合(Set) 区别主要在于它们的可变性(是否可以修改&#x…...

浏览器中优雅查看Markdown文件的终极解决方案:Markdown Viewer完全指南
浏览器中优雅查看Markdown文件的终极解决方案:Markdown Viewer完全指南 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer 你是否经常需要查看GitHub上的README文件、技术…...

海洋涡旋识别与追踪:如何用Python快速掌握海洋中尺度涡旋的完整分析流程?
海洋涡旋识别与追踪:如何用Python快速掌握海洋中尺度涡旋的完整分析流程? 【免费下载链接】py-eddy-tracker Eddy identification and tracking 项目地址: https://gitcode.com/gh_mirrors/py/py-eddy-tracker 你是否曾为海洋涡旋数据处理的复杂性…...

ARMv8/v9虚拟化核心:SCTLR_EL2寄存器详解与配置实践
1. AArch64 SCTLR_EL2系统寄存器深度解析在ARMv8/v9架构的异常级别(Exception Level)设计中,EL2作为虚拟化管理的核心层级,其系统控制寄存器SCTLR_EL2承载着关键的系统配置功能。这个64位寄存器不仅控制着EL2自身的内存管理和系统…...

基准测试结果刚出炉,DeepSeek在医疗/法律/金融三大垂直领域事实准确率对比,谁在说真话?
更多请点击: https://intelliparadigm.com 第一章:基准测试结果刚出炉,DeepSeek在医疗/法律/金融三大垂直领域事实准确率对比,谁在说真话? 我们基于权威垂直领域评测集——MedMCQA(医疗)、Case…...

新手入门教程使用Python快速配置Taotoken的OpenAI兼容API调用环境
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手入门教程使用Python快速配置Taotoken的OpenAI兼容API调用环境 对于刚接触大模型API的Python开发者来说,快速搭建一…...

Unity日志语义分析工具:Editor Console Pro深度解析
1. 这不是“换个皮肤”——Editor Console Pro 解决的是 Unity 开发中被长期忽视的“信息过载失能症”你有没有过这样的时刻:刚点下 Play,控制台瞬间炸出 200 行日志,红色错误、黄色警告、蓝色调试信息混作一团;你盯着屏幕三秒&am…...

git reset 怎么用?2026年最完整操作指南,撤销提交不再手足无措
代码提交了才发现写错了,或者本地 commit 堆了一堆想整理——你是直接新建一个"撤回"commit,还是对着搜索结果一脸茫然不敢乱动? 如果你还没搞清楚 git reset 的三种模式,随时可能把代码撤没了。学完本文,你…...

甲骨文免费服务器到手后,用Xshell连接不上?这份SSH密钥配置避坑指南请收好
甲骨文云SSH连接全攻略:从密钥解析到Xshell实战配置 密钥管理的核心逻辑与常见误区 初次接触甲骨文云免费实例的用户,90%的SSH连接问题都源于密钥处理不当。与常规密码登录不同,甲骨文云强制采用密钥对认证机制,这种设计虽然提升了…...

SAP 和 Legacy 系统之间的平面文件集成,GUI_DOWNLOAD 的实战设计
很多 SAP 项目里,系统集成并不总是从 API、RFC、OData 或 Event Mesh 开始。相当多的老系统仍然依赖一个最朴素的接口形态,固定格式的文本文件。财务共享平台要一份物料清单,仓储系统要一份当天新增物料,历史的生产执行系统只认 .txt 或 .csv,这时 ABAP 报表把 SAP 表里的…...

5个关键功能:如何将普通鼠标打造成macOS生产力神器?
5个关键功能:如何将普通鼠标打造成macOS生产力神器? 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 你是否曾为macOS上的…...