【mars3d】 graphic.bindPopup(inthtml).openPopup()无需单击小车,即可在地图上自动激活弹窗的效果。
实现效果:new mars3d.graphic.FixedRoute({无需单击小车,即可在地图上实现默认打开弹窗的激活效果。↓↓↓↓↓↓↓↓

相关链接说明:
1.popup的示例完全开源,可参考:功能示例(Vue版) | Mars3D三维可视化平台 | 火星科技
2.绑定的矢量数据上的弹框通过代码默认激活打开参考:功能示例(Vue版) | Mars3D三维可视化平台 | 火星科技
3.实现逻辑:在该矢量数据上bindPopup(),bindPopup之后再该小车数据上openPopup()
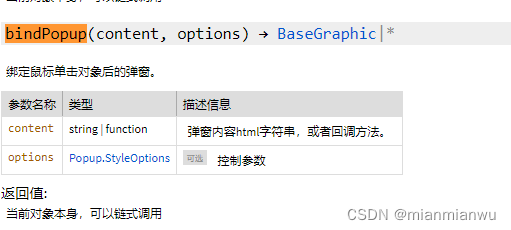
4.api说明:
BaseGraphic - V3.7.0 - Mars3D API文档
BaseGraphic - V3.7.0 - Mars3D API文档

相关演示代码:
import * as mars3d from "mars3d"
export let map // mars3d.Map三维地图对象
export const eventTarget = new mars3d.BaseClass() // 事件对象,用于抛出事件到面板中
let graphicLayer
// 需要覆盖config.json中地图属性参数(当前示例框架中自动处理合并)
export const mapOptions = {
scene: {
center: { lat: 30.836861, lng: 116.044673, alt: 1395, heading: 14, pitch: -42 }
},
control: {
clockAnimate: true, // 时钟动画控制(左下角)
timeline: true, // 是否显示时间线控件
compass: { top: "10px", left: "5px" }
}
}
/**
* 初始化地图业务,生命周期钩子函数(必须)
* 框架在地图初始化完成后自动调用该函数
* @param {mars3d.Map} mapInstance 地图对象
* @returns {void} 无
*/
export function onMounted(mapInstance) {
map = mapInstance // 记录map
map.toolbar.style.bottom = "55px" // 修改toolbar控件的样式
// 创建矢量数据图层
graphicLayer = new mars3d.layer.GraphicLayer()
map.addLayer(graphicLayer)
// 加载完成在加载小车,否则地形未加载完成,小车会处于地下
map.on(mars3d.EventType.load, function (event) {
addGraphicLayer()
})
}
/**
* 释放当前地图业务的生命周期函数
* @returns {void} 无
*/
export function onUnmounted() {
map = null
}
function addGraphicLayer() {
const fixedRoute = new mars3d.graphic.FixedRoute({
name: "贴地表表面漫游",
speed: 160,
positions: [
[116.043233, 30.845286, 392.48],
[116.046833, 30.846863, 411.33],
[116.052137, 30.848801, 439.45],
[116.060838, 30.850918, 442.91],
[116.069013, 30.852035, 435.14],
[116.18739, 30.854441, 244.53],
[116.205214, 30.859332, 300.96]
],
clockLoop: false, // 是否循环播放
camera: {
type: "gs",
pitch: -30,
radius: 500
},
// model: {
// show: true,
// url: '//data.mars3d.cn/gltf/mars/qiche.gltf',
// scale: 0.2,
// minimumPixelSize: 50,
// },
model: {
url: "//data.mars3d.cn/gltf/mars/jingche/jingche.gltf",
heading: 90,
mergeOrientation: true, // 用于设置模型不是标准的方向时的纠偏处理,在orientation基础的方式值上加上设置是heading值
minimumPixelSize: 50
},
polyline: {
color: "#ffff00",
width: 3
}
})
graphicLayer.addGraphic(fixedRoute)
// 绑定popup
bindPopup(fixedRoute)
fixedRoute.on(mars3d.EventType.start, function (event) {
console.log("漫游开始start")
})
fixedRoute.on(mars3d.EventType.end, function (event) {
console.log("漫游结束end")
})
// ui面板信息展示
fixedRoute.on(mars3d.EventType.change, (event) => {
// const popup = event.graphic.getPopup()
// const container = popup?.container // popup对应的DOM
// console.log("漫游change", event)
throttled(eventTarget.fire("roamLineChange", event), 500)
})
map.on(mars3d.EventType.keydown, function (event) {
// 空格 切换暂停/继续
if (event.keyCode === 32) {
if (fixedRoute.isPause) {
fixedRoute.proceed()
} else {
fixedRoute.pause()
}
}
})
// 不贴地时,直接开始
// startFly(fixedRoute)
// 需要计算贴地点时,异步计算完成贴地后再启动
showLoading()
fixedRoute.autoSurfaceHeight().then(function (e) {
hideLoading()
startFly(fixedRoute)
})
}
function startFly(fixedRoute) {
fixedRoute.start()
fixedRoute.openPopup() // 显示popup
addParticleSystem(fixedRoute.property)
}
function bindPopup(fixedRoute) {
fixedRoute.bindPopup(
`<div style="width: 200px">
<div>总 距 离:<span id="lblAllLen"> </span></div>
<div>总 时 间:<span id="lblAllTime"> </span></div>
<div>开始时间:<span id="lblStartTime"> </span></div>
<div>剩余时间:<span id="lblRemainTime"> </span></div>
<div>剩余距离:<span id="lblRemainLen"> </span></div>
</div>`,
{ closeOnClick: false }
)
// 刷新局部DOM,不影响popup面板的其他控件操作
fixedRoute.on(mars3d.EventType.postRender, function (event) {
const container = event.container // popup对应的DOM
const params = fixedRoute?.info
if (!params) {
return
}
const lblAllLen = container.querySelector("#lblAllLen")
if (lblAllLen) {
lblAllLen.innerHTML = mars3d.MeasureUtil.formatDistance(params.distance_all)
}
const lblAllTime = container.querySelector("#lblAllTime")
if (lblAllTime) {
lblAllTime.innerHTML = mars3d.Util.formatTime(params.second_all / map.clock.multiplier)
}
const lblStartTime = container.querySelector("#lblStartTime")
if (lblStartTime) {
lblStartTime.innerHTML = mars3d.Util.formatDate(Cesium.JulianDate.toDate(fixedRoute.startTime), "yyyy-M-d HH:mm:ss")
}
const lblRemainTime = container.querySelector("#lblRemainTime")
if (lblRemainTime) {
lblRemainTime.innerHTML = mars3d.Util.formatTime((params.second_all - params.second) / map.clock.multiplier)
}
const lblRemainLen = container.querySelector("#lblRemainLen")
if (lblRemainLen) {
lblRemainLen.innerHTML = mars3d.MeasureUtil.formatDistance(params.distance_all - params.distance) || "完成"
}
})
}
// 添加尾气粒子效果
function addParticleSystem(property) {
const particleSystem = new mars3d.graphic.ParticleSystem({
position: property,
style: {
image: "./img/particle/smoke.png",
particleSize: 12, // 粒子大小(单位:像素)
emissionRate: 20.0, // 发射速率 (单位:次/秒)
pitch: 40, // 俯仰角
maxHeight: 1000, // 超出该高度后不显示粒子效果
startColor: Cesium.Color.GREY.withAlpha(0.7), // 开始颜色
endColor: Cesium.Color.WHITE.withAlpha(0.0), // 结束颜色
startScale: 1.0, // 开始比例(单位:相对于imageSize大小的倍数)
endScale: 5.0, // 结束比例(单位:相对于imageSize大小的倍数)
minimumSpeed: 1.0, // 最小速度(米/秒)
maximumSpeed: 4.0 // 最大速度(米/秒)
},
attr: { remark: "车辆尾气" }
})
graphicLayer.addGraphic(particleSystem)
}
// ui层使用
export const formatDistance = mars3d.MeasureUtil.formatDistance
export const formatTime = mars3d.Util.formatTime
// 节流
function throttled(fn, delay) {
let timer = null
let starttime = Date.now()
return function () {
const curTime = Date.now() // 当前时间
const remaining = delay - (curTime - starttime)
// eslint-disable-next-line @typescript-eslint/no-this-alias
const context = this
// eslint-disable-next-line prefer-rest-params
const args = arguments
clearTimeout(timer)
if (remaining <= 0) {
fn.apply(context, args)
starttime = Date.now()
} else {
timer = setTimeout(fn, remaining)
}
}
}
备注说明:

1.直接通过new mars3d.graphic.ModelEntity({相关矢量上绑定再激活也可以,关键代码:
graphic.bindPopup(inthtml).openPopup()
实现链接:
功能示例(Vue版) | Mars3D三维可视化平台 | 火星科技
实现代码参考:
function addDemoGraphic1(graphicLayer) {
const graphic = new mars3d.graphic.ModelEntity({
name: "警车",
position: [116.346929, 30.861947, 401.34],
style: {
url: "//data.mars3d.cn/gltf/mars/jingche/jingche.gltf",
scale: 20,
minimumPixelSize: 50,
heading: 90,
distanceDisplayCondition: true,
distanceDisplayCondition_near: 0,
distanceDisplayCondition_far: 10000,
distanceDisplayPoint: {
// 当视角距离超过一定距离(distanceDisplayCondition_far定义的) 后显示为点对象的样式
color: "#00ff00",
pixelSize: 8
},
label: {
text: "我是原始的",
font_size: 18,
color: "#ffffff",
pixelOffsetY: -50,
distanceDisplayCondition: true,
distanceDisplayCondition_far: 10000,
distanceDisplayCondition_near: 0
}
},
attr: { remark: "示例1" }
})
graphicLayer.addGraphic(graphic)
// 演示个性化处理graphic
initGraphicManager(graphic)
}
// 也可以在单个Graphic上做个性化管理及绑定操作
function initGraphicManager(graphic) {
const inthtml = `<table style="width: auto;">
<tr>
<th scope="col" colspan="2" style="text-align:center;font-size:15px;">我是graphic上绑定的Popup </th>
</tr>
<tr>
<td>提示:</td>
<td>这只是测试信息,可以任意html</td>
</tr>
</table>`
graphic.bindPopup(inthtml).openPopup()
}
相关文章:
【mars3d】 graphic.bindPopup(inthtml).openPopup()无需单击小车,即可在地图上自动激活弹窗的效果。
实现效果:new mars3d.graphic.FixedRoute({无需单击小车,即可在地图上实现默认打开弹窗的激活效果。↓↓↓↓↓↓↓↓ 相关链接说明: 1.popup的示例完全开源,可参考:功能示例(Vue版) | Mars3D三维可视化平台 | 火星科…...
工厂企业消防安全AI可视化视频智能监管解决方案
一、方案背景 2023年11月20日下午6时30分许,位于江苏省无锡市惠山区前洲街道的某公司突发严重火灾,共造成7人死亡。这次火灾提醒我们工业安全至关重要,企业都应该时刻保持警惕,加强安全意识和培训,提高应对突发事件的…...
【并发编程】synchornized原理
📝个人主页:五敷有你 🔥系列专栏:并发编程 ⛺️稳重求进,晒太阳 目录 Monitor概念 Java对象头 普通对象 数组对象 Monitor(锁) Monitor结构如下: 注意: 原理之synchornized 轻量…...
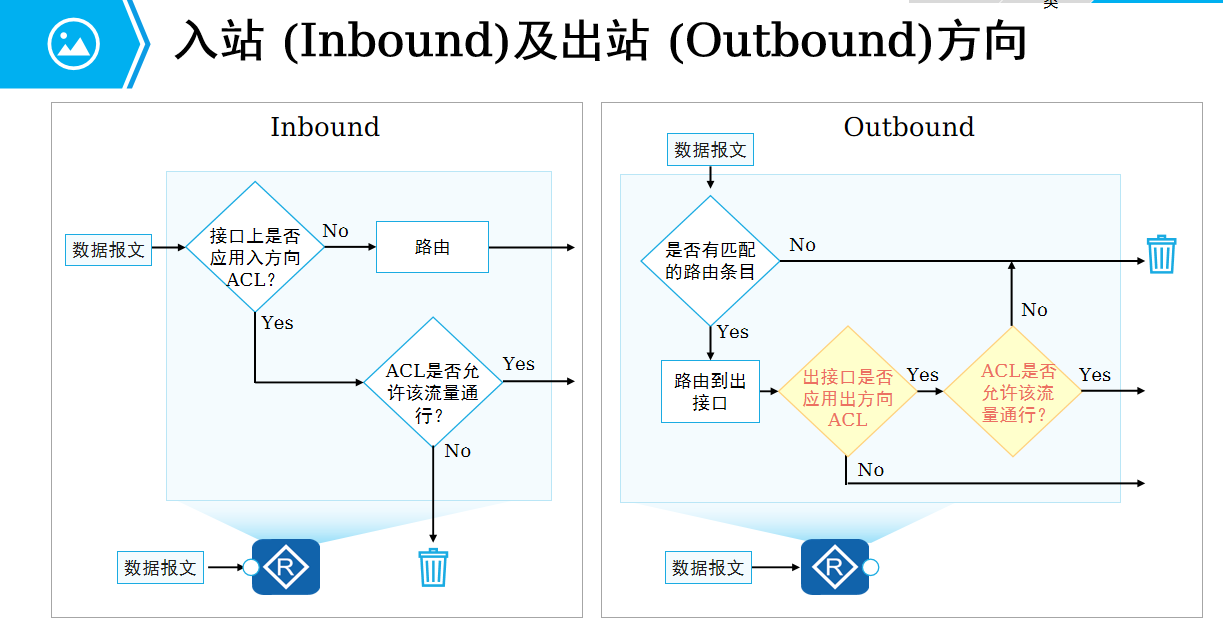
计算机网络-ACL访问控制列表
上一篇介绍NAT时候就看到了ACL这个东西了,这个是什么意思?有什么作用呢? 一、ACL访问控制列表 访问控制列表 (ACL, Access Control List)是由一系列permit或deny语句组成的、有序规则的列表。ACL是一个匹配工具,能够对报文进行匹配…...
论文学习记录之SeisInvNet(Deep-Learning Inversion of Seismic Data)
目录 1 INTRODUCTION—介绍 2 RELATED WORKS—相关作品 3 METHODOLOGY AND IMPLEMENTATION—方法和执行 3.1 方法 3.2 执行 4 EXPERIMENTS—实验 4.1 数据集准备 4.2 实验设置 4.3 基线模型 4.4 定向比较 4.5 定量比较 4.6 机理研究 5 CONCLUSION—结论 1 INTRODU…...

深度学习中的优化方法
深度学习中的优化问题通常指的是:寻找神经网络上的一组参数 θ \theta θ,它能显著地降低代价函数 J ( θ ) J(\theta) J(θ...
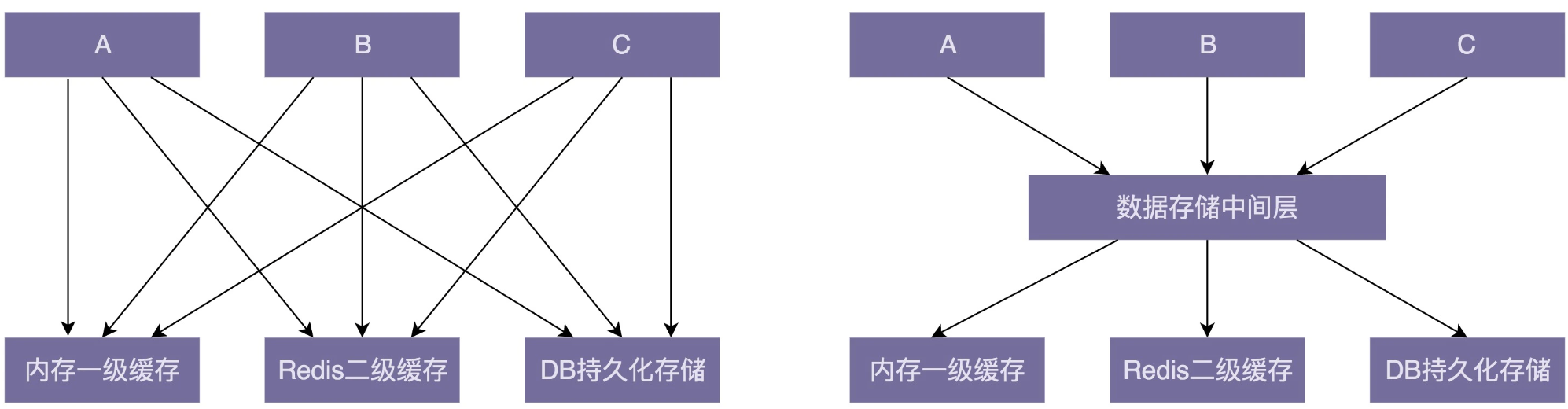
【设计模式之美】重构(三)之解耦方法论:如何通过封装、抽象、模块化、中间层等解耦代码?
文章目录 一. “解耦”概述二. 如何给代码“解耦”?1. 封装与抽象2. 中间层2.1. 引入中间层能**简化模块或类之间的依赖关系**。2.2. 引入中间层可以起到过渡的作用,能够让开发和重构同步进行,不互相干扰。 3. 模块化4. 其他设计思想和原则4.…...

Spring MVC学习之——Controller类中方法的返回值
Controller类中方法的返回值 1.返回ModelAndView RequestMapping("/hello")public ModelAndView hello(){//封装了页面和数据ModelAndView view new ModelAndView();//对这个请求的页面添加属性(数据)view.addObject("hello",&quo…...
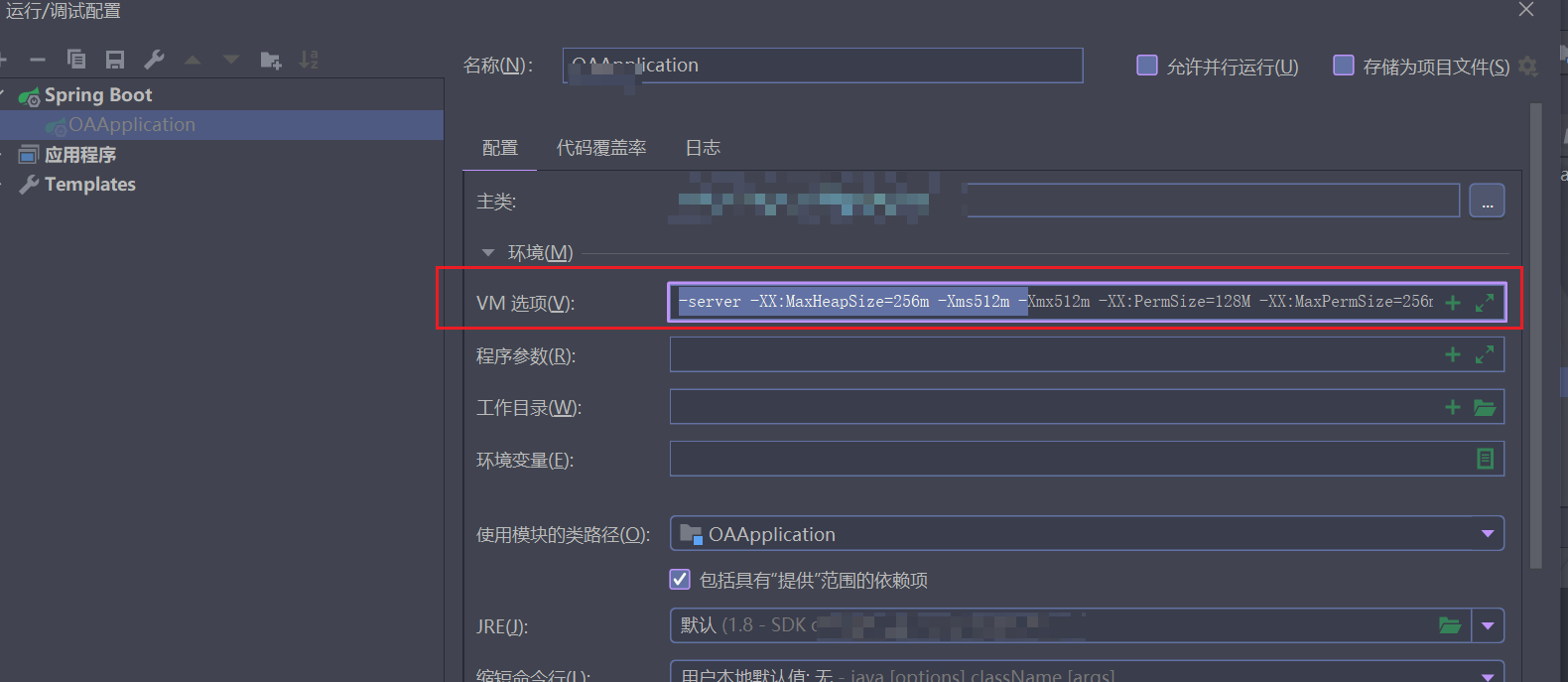
IDEA中启动项目报堆内存溢出或者没有足够内存的错误
1.报错现象 java.lang.OutOfMemoryError: Java heap space 或者 Could not reserve enough space for object heap 2.解决办法 在运行配置中VM选项后加下面的配置: -server -XX:MaxHeapSize256m -Xms512m -Xmx512m -XX:PermSize128M -XX:MaxPermSize256m 3.JVM虚…...

Angular: DOCUMENT
不用原生的 document,是因为不利于后端渲染,所以避免使用原生浏览器的对象 import { DOCUMENT } from angular/common; import { Directive, Inject, Input, OnChanges, Output, Renderer2, SimpleChanges } from angular/core;Directive({selector: [a…...

mybatis-plus批量保存异常及效率优化
最近基于自己公司内部服务维护,发现其中调度中心近期出现不少错误日志,但是该任务却是正常执行,生成的报表数据也是正常的,所以很多天没有发现问题 这就匪夷所思了, 经仔细排查发现,是触发了feign超时hyst…...

查找局域网树莓派raspberry的mac地址和ip
依赖python库: pip install socket pip install scapy运行代码: import socket from scapy.layers.l2 import ARP, Ether, srpdef get_hostname(ip_address):try:return socket.gethostbyaddr(ip_address)[0]except socket.herror:# 未能解析主机名ret…...

乐观锁与悲观锁:高并发场景下的选择
😄 19年之后由于某些原因断更了三年,23年重新扬帆起航,推出更多优质博文,希望大家多多支持~ 🌷 古之立大事者,不惟有超世之才,亦必有坚忍不拔之志 🎐 个人CSND主页——Mi…...

vue2 省市区联动组件封装
在element ui中有级联选择器el-cascader,其实已经够用了,但是在实际需求中,发现el-cascader如果有三级,数据数组必须得三个才能完全展示,所以不符合实际需求,还是自定义封装吧 需求:省市区联动数组,有多少个显示多少个 这里使用element ui得el-select组件,思路是使用…...
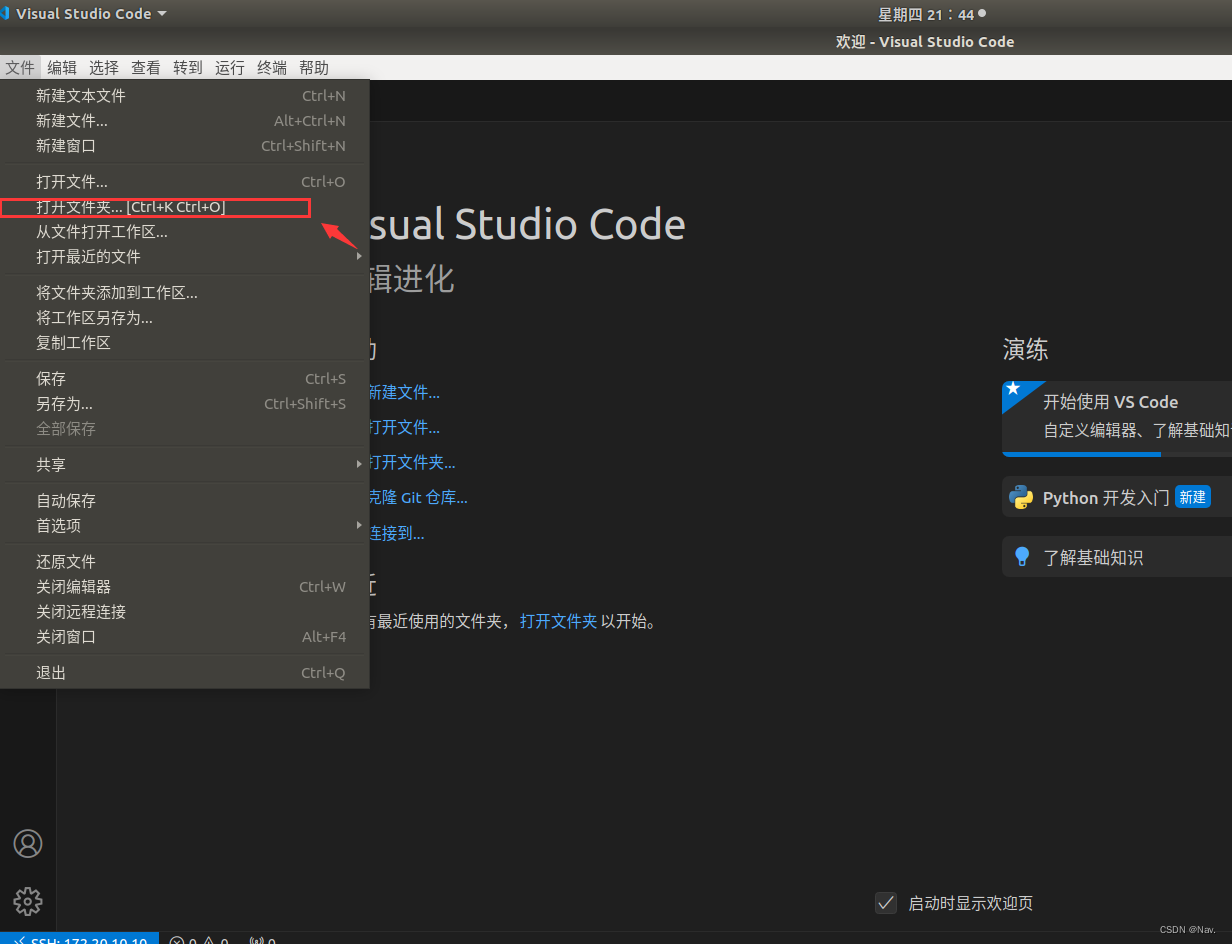
VScode远程开发
VScode远程开发 在SSH远程连接一文中,我么介绍了如何使用ssh远程连接Jetson nano端,但是也存在诸多不便,比如:编辑文件内容时,需要使用vi编辑器,且在一个终端内,无法同时编辑多个文件。本节将介绍一较为实用…...

芯片设计重要工具—— IBM LSF 分布式高性能计算调度平台
IBM Spectrum LSF Suites 是面向分布式高性能计算 (HPC) 的工作负载管理平台和作业调度程序。基于 Terraform 的自动化现已可用,该功能可在 IBM Cloud 上为基于 IBM Spectrum LSF 的集群供应和配置资源。 借助我们针对任务关键型 HPC 环境的集成解决方案࿰…...
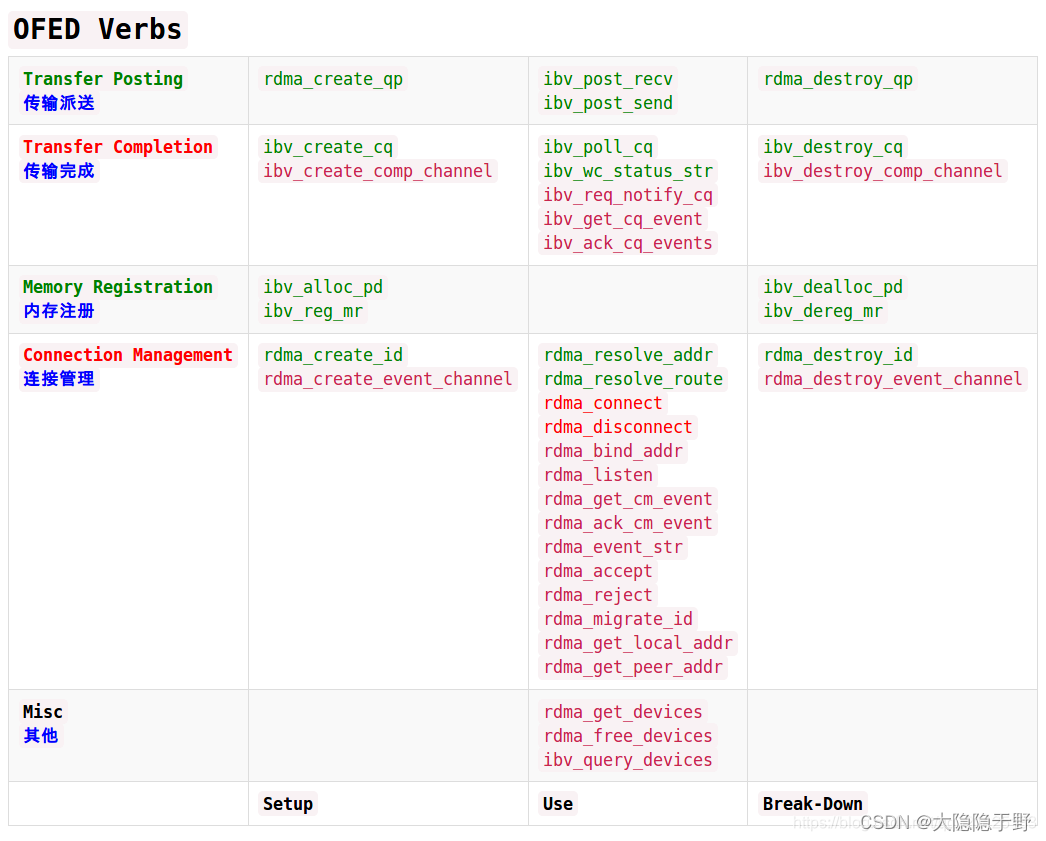
RDMA Scatter Gather List详解
1. 前言 在使用RDMA操作之前,我们需要了解一些RDMA API中的一些需要的值。其中在ibv_send_wr我们需要一个sg_list的数组,sg_list是用来存放ibv_sge元素,那么什么是SGL以及什么是sge呢?对于一个使用RDMA进行开发的程序员来说&#…...

【动态规划】24子数组系列_最长湍流子数组_C++
题目链接:最长湍流子数组 目录 题目解析: 算法原理 1.状态表示 2.状态转移方程 3.初始化 4.填表顺序 5.返回值 编写代码 题目解析: 题目让我们求返回 arr 的 最大湍流子数组的长度 由题可得: 如果比较符号在子数组中的…...
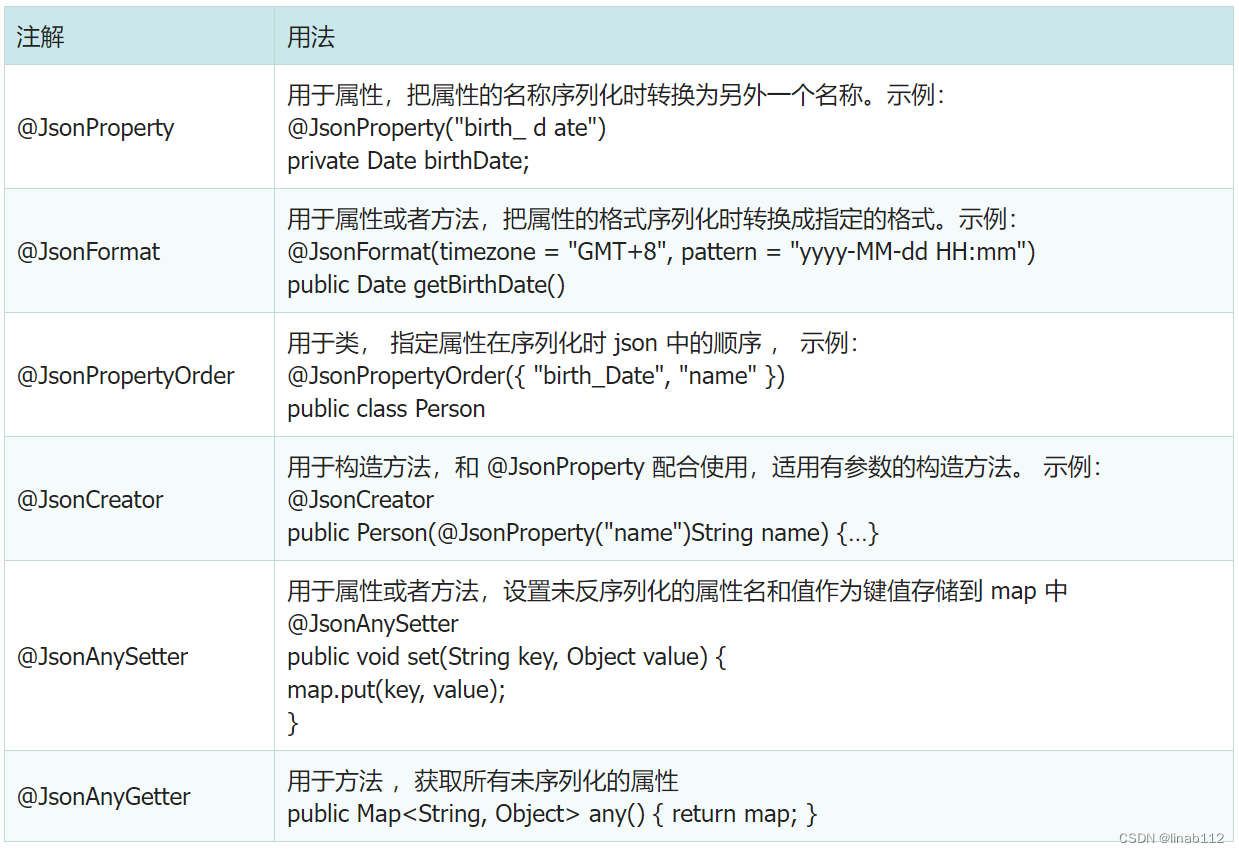
fastJson和jackson的日期数据处理
目录 1.jackson 2.fastjson 3.总结 1.jackson jackson是spring mvc默认的JSON解析方法,前端的数据序列化处理之后,后端经过反序列化处理可以直接使用实体对象进行接收。后端接口返回实体对象,经过序列化处理后前端可以接收并进行处理。 …...
书生·浦语大模型实战营第五节课笔记及作业
LMDeploy 大模型量化部署实践 1 大模型部署背景 1.1 模型部署及大模型特点 1.2 大模型部署挑战及方案 2 LMDeploy简介 2.1 核心功能-量化 2.2 核心功能-推理引擎TurboMind 2.1 核心功能-推理服务api server 3 动手实践及作业 按照文档LMDeploy 的量化和部署中的步骤在Intern…...

Youtu-Parsing快速部署指南:一键启动Web服务,5分钟开始解析文档
Youtu-Parsing快速部署指南:一键启动Web服务,5分钟开始解析文档 1. 引言:为什么选择Youtu-Parsing 在日常工作中,我们经常需要处理各种文档——合同、报告、表格、发票等。传统的手动录入方式不仅效率低下,还容易出错…...

实测分享:电脑端专业金价查看软件 AnyGold,办公盯盘两不误
作为经常关注黄金行情的开发者与上班族,日常总被浏览器反复刷新、网页卡顿、广告弹窗、数据分散等问题困扰。最近试用了 AnyGold 这款电脑端金价查看工具,连续使用两周,整体体验稳定、轻量、实用。下面以纯实测角度,客观讲讲它的功…...

如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南
如何解决Cats类型推导难题:SI-2712修复与部分统一完整指南 【免费下载链接】cats Lightweight, modular, and extensible library for functional programming. 项目地址: https://gitcode.com/gh_mirrors/ca/cats Cats是一个轻量级、模块化且可扩展的函数式…...

intv_ai_mk11安全使用指南:敏感信息规避策略、输出内容校验方法、数据持久化提醒
intv_ai_mk11安全使用指南:敏感信息规避策略、输出内容校验方法、数据持久化提醒 1. 安全使用概述 intv_ai_mk11是一款基于Llama架构的AI对话助手,能够处理各类知识问答、文案创作和技术讨论。为确保用户数据安全和合规使用,本指南将详细介…...

关于eclipse2019中导入克隆的web项目
分为导入项目和排查可能错误两个方面前言:本文主要总结个人在完成需要合作完成学习项目时,使用共享项目文件时“环境”问题导致的无法“跑通”,为此忙碌很久和豆包进行了“深入聊天”。决定对自己的问题进行总结,方便自己以后阅读…...

OpenClaw技能开发模板:5分钟为Kimi-VL-A3B-Thinking创建自定义多模态处理器
OpenClaw技能开发模板:5分钟为Kimi-VL-A3B-Thinking创建自定义多模态处理器 1. 为什么需要自定义技能 上周我在处理一批产品截图和用户反馈时,突然意识到一个痛点:虽然Kimi-VL-A3B-Thinking多模态模型能理解图片内容,但每次都要…...

2026届毕业生推荐的十大降重复率神器解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 降低AIGC痕迹的关键之处在于去除机器生成的那种模式化特性,如果要采用避免使用过…...

先被日本汽车打败,再被中国汽车冲击,欧洲车面临崩盘,已累计裁员50万人!
大众汽车在公布2025年的利润腰斩之后,发布了进一步裁员计划,到2030年将削减5万个工作岗位,占它当下员工总人数的比例大约7.5%,由此业界人士统计了近几年来欧洲诸多车企以及汽车供应链企业宣布的裁员人数,发现欧洲汽车行…...

独立站建站成本全解析
独立站建站费用构成独立站的费用主要分为域名注册、主机托管、网站建设、支付接口、营销推广和日常维护等几个部分。每个部分的费用因需求不同而有较大差异。域名注册费用通常在每年10至100美元之间,取决于域名后缀和注册商。常见的.com域名价格在10至20美元/年&…...

数据处理与统计分析----沙箱
命令行操作沙箱...