[C++]使用yolov5的onnx模型结合onnxruntime和bytetrack实现目标追踪
【官方框架地址】
yolov5框架:https://github.com/ultralytics/yolov5
bytetrack框架:https://github.com/ifzhang/ByteTrack
【算法介绍】
Yolov5与ByTetrack:目标追踪的强大组合
Yolov5和ByTetrack是两种在目标追踪领域具有显著影响力的技术。当它们结合使用时,可以显著提高目标追踪的准确性和实时性。
Yolov5是Yolov系列算法的最新版本,它在目标检测方面具有出色的性能。相较于之前的版本,Yolov5在精度和速度上都进行了优化,使其成为实时目标检测的理想选择。通过结合ByTetrack,Yolov5可以更有效地应用于目标追踪任务。
ByTetrack是一种基于轨迹匹配的目标追踪方法。它利用目标的运动信息和外观特征进行追踪,能够在复杂场景下实现稳定的目标追踪。ByTetrack的优势在于其强大的鲁棒性和适应性,即使在目标被遮挡或出现运动模糊的情况下,它仍能保持较高的追踪精度。
当Yolov5与ByTetrack结合使用时,Yolov5首先检测视频中的目标,并生成目标的初始位置和运动轨迹。然后,ByTetrack利用这些信息对目标进行精确追踪。这种结合方式既发挥了Yolov5的高检测精度,又利用了ByTetrack的高追踪精度,使得整体目标追踪效果显著提升。
综上所述,Yolov5与ByTetrack的结合为解决复杂场景下的目标追踪问题提供了新的解决方案。随着人工智能技术的不断进步,这种结合方式有望成为目标追踪领域的研究热点和发展趋势。通过进一步的研究和优化,我们可以期待这种组合在未来的目标追踪任务中发挥更大的潜力。
【效果展示】

【实现部分代码】
#include <iostream>
#include <fstream>
#include <iomanip>
#include <time.h>
#include <chrono>
#include <opencv2/opencv.hpp>
#include <opencv2/videoio.hpp>
#include "onnxruntime_cxx_api.h"
#include "onnxruntime_c_api.h"
#include "util.h"
#include "detector.h"
#include <map>
#include "logs.h"
#include "BYTETracker.h"
#include<algorithm>void bytetrack_update(const std::vector<Detection>& res, std::vector<Object>& obj, const int& class_id ){for (size_t i = 0; i < res.size(); i++){try{if (res[i].classId != class_id){ continue; }obj[i].label = res[i].classId;obj[i].rect.x = res[i].box.x;obj[i].rect.y = res[i].box.y;obj[i].rect.height = res[i].box.height;obj[i].rect.width = res[i].box.width;obj[i].prob = res[i].conf;}catch(const std::exception& e){std::cerr << e.what() << '\n';} }};int main(int argc, char* argv[])
{std::map<int, std::vector<int>> object_id_list;const std::vector<std::string> classNames = util::loadNames("labels.txt");const int class_id = 2;//只想追踪的目标YOLODetector detector {nullptr};cv::Mat frame;std::vector<Detection> result;detector = YOLODetector("yolov5s.onnx", false, cv::Size(640,640));std::vector <double> avg;cv::VideoCapture source("D:\\car.mp4");std::chrono::time_point<std::chrono::high_resolution_clock>prev_frame_time(std::chrono::high_resolution_clock::now());std::chrono::time_point<std::chrono::high_resolution_clock>new_frame_time;int frame_width = source.get(cv::CAP_PROP_FRAME_WIDTH);int frame_height = source.get(cv::CAP_PROP_FRAME_HEIGHT);int fpsvideo = source.get(cv::CAP_PROP_FPS);cv::namedWindow("Camera", cv::WINDOW_NORMAL);BYTETracker tracker(fpsvideo, 30);while (source.isOpened()) {source >> frame;if (frame.empty()){break;}std::vector<Object> obj;result = detector.detect(frame, 0.5, 0.45);const int num = result.size();obj.resize(num);bytetrack_update(result, obj, class_id);std::vector<STrack> output_stracks = tracker.update(obj);for (size_t i = 0; i < output_stracks.size(); i++){std::vector<float> tlwh = output_stracks[i].tlwh;cv::Scalar __color = tracker.get_color(output_stracks[i].track_id);cv::putText(frame, std::to_string(output_stracks[i].track_id), cv::Point(tlwh[0], tlwh[1] - 10), cv::FONT_ITALIC, 0.75, __color, 2);cv::rectangle(frame, cv::Rect(tlwh[0], tlwh[1], tlwh[2], tlwh[3]), __color, 2); }//cv::imwrite("demo.jpg", frame);new_frame_time = std::chrono::high_resolution_clock::now();std::chrono::duration<double> duration1(new_frame_time - prev_frame_time);double fps = 1/duration1.count();avg.push_back(fps);std::cout <<"FPS: " << fps << std::endl;prev_frame_time = new_frame_time;cv::imshow("Camera", frame);if (cv::waitKey(1) == 27) {break;}}cv::destroyAllWindows();detector.Dispose();return 0;
}
【视频演示】
https://www.bilibili.com/video/BV1iT4y1h7Wa/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
【测试环境】
opencv==4.7.0 onnxruntime==1.12.0 vs2019 cmake==3.24.3
相关文章:
[C++]使用yolov5的onnx模型结合onnxruntime和bytetrack实现目标追踪
【官方框架地址】 yolov5框架:https://github.com/ultralytics/yolov5 bytetrack框架:https://github.com/ifzhang/ByteTrack 【算法介绍】 Yolov5与ByTetrack:目标追踪的强大组合 Yolov5和ByTetrack是两种在目标追踪领域具有显著影响力…...
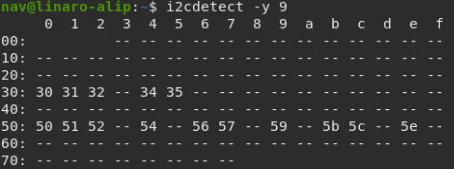
i2c接口验证
用i2cdetect命令。 1,检测有几组i2c总线在系统上 i2cdetect -l 2,查询i2c总线上挂接的设备及设备的地址 i2cdetect -y <number> i2cdetect -y 0命令用于扫描I2C总线/dev/i2c-0,并列出所有在该总线上存在的有效I2C设备地址。...

1、Pandas 数据结构:从 Series 到 DataFrame
目录 Series 创建 Series Series 索引和选择 DataFrame 创建 DataFrame DataFrame 索引和选择 DataFrame 操作和转换 数据结构转换 Series Series 是 Pandas 中的一维数组形式的数据结构,它可以包含任何数据类型(整数、字符串、浮点数、Python对象…...

MySQL函数—字符串函数
MySQL函数—字符串函数 函数功能CONCAT(s1,s2,...sn)字符串拼接,将s1,s2,...sn拼接成一个字符串LOWER(str)将字符串全部转为小写UPPER(str)将字符串全部转为大写LPAD(str,n,pad)左填充,用字符串pad对str左边进行填充,达到n个字符串长度RPAD(s…...

PLC从HTTP服务端获取JSON文件,解析数据到寄存器
智能网关IGT-DSER集成了多种PLC协议,方便实现各种PLC与HTTP服务端之间通讯。通过网关的参数配置软件绑定JSON文件的字段与PLC寄存器地址,配置URL,即可采用POST命令,将JSON文件提交给HTTP的服务端; 服务端有返回的JSON&…...

LeetCode 46. 全排列
46. 全排列 给定一个不含重复数字的数组 nums ,返回其 所有可能的全排列 。你可以 按任意顺序 返回答案。 示例 1: 输入:nums [1,2,3] 输出:[[1,2,3],[1,3,2],[2,1,3],[2,3,1],[3,1,2],[3,2,1]]示例 2: 输入&#…...
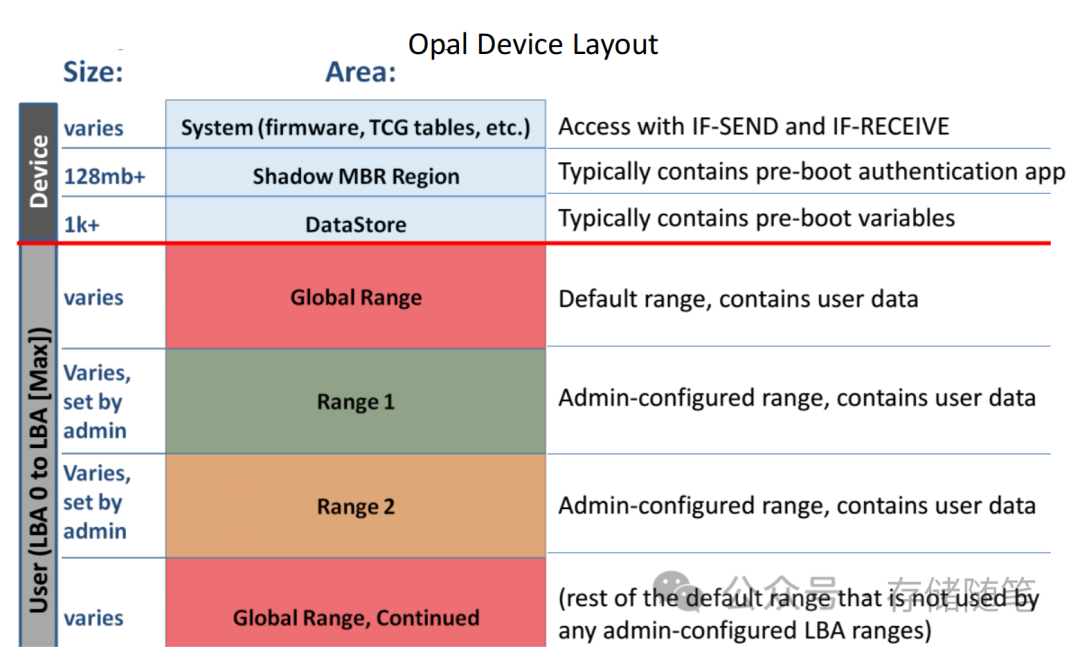
NVMe TCG安全数据存储简介
NVMe(非易失性内存主机控制器接口规范)与TCG(可信计算组)的集成主要体现在数据安全、固件验证和硬件信任根等方面,以确保存储设备的数据保护能力和安全性。 TCG Opal定义了一套针对自加密硬盘(SED, Self-En…...
)
Linux命令-ab命令(Apache服务器的性能测试工具 )
Apache服务器的性能测试工具 ab命令 是一个测试你 Apache http 服务器的工具,你可以通过这个工具,指定一个单位时间内向 apache 发出的请求数量来看看你的 Apache 和机器配合的性能如何。 语法 []内容为ab命令后跟的语法,eg:ab …...
蓝桥杯java基础
数组的倒序与隔位输出 时间限制:1.000S 空间限制:128MB 题目描述 给定一个整数数组,编写一个程序实现以下功能: 1. 将输入的整数数组倒序输出,每个数之间用空格分隔。 2. 从正序数组中,每隔一个单位&a…...

Unity3d引擎中使用AIGC生成的360全景图(天空盒)
前言 在这里与Skybox AI一起,一键打造体验无限的360世界,这是这个AIGC一键生成全景图的网站欢迎语。 刚使用它是23年中旬,在没有空去给客户实地拍摄全景图时,可以快速用它生成一些相关的全景图,用作前期沟通的VR de…...
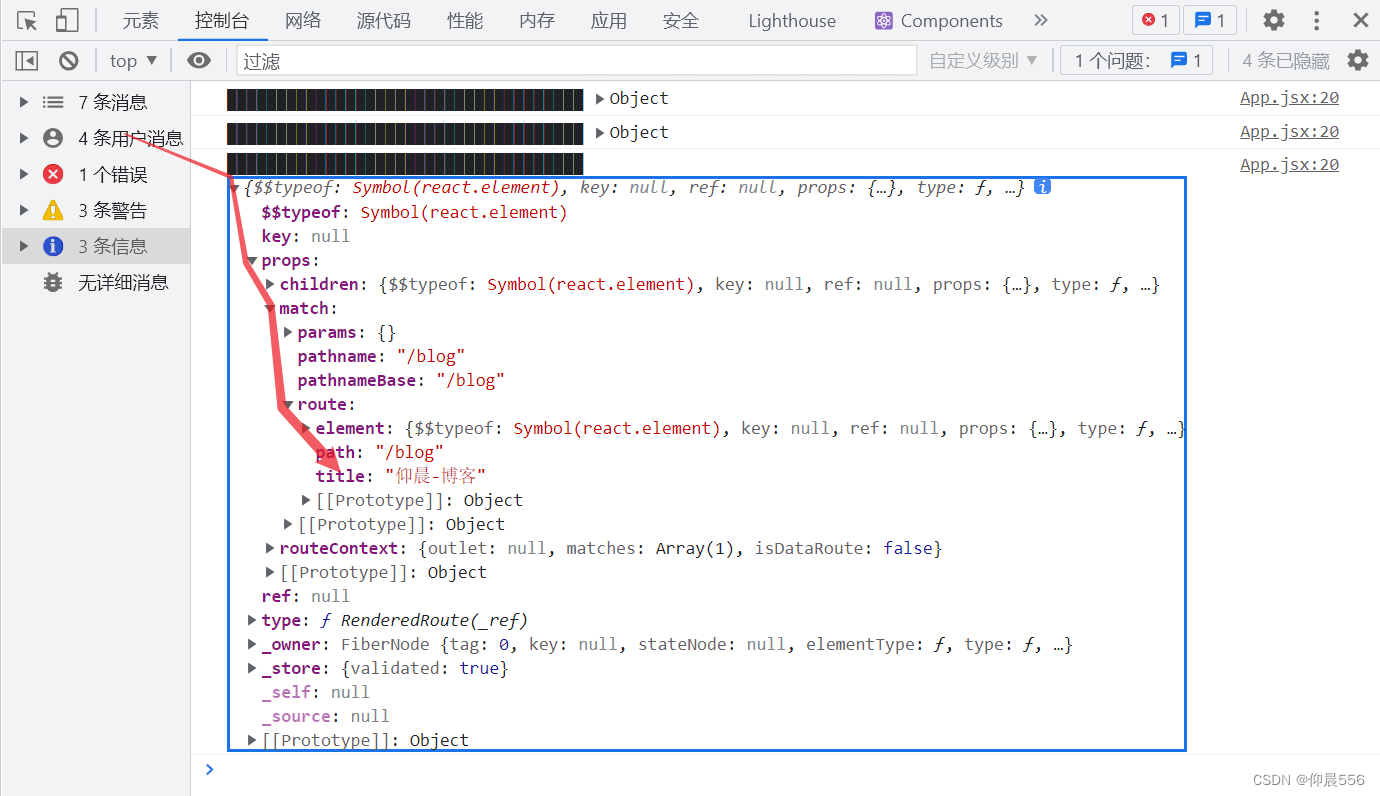
React Router v6 改变页面Title
先说正事再闲聊 1、在路由表加个title字段 2、在index包裹路由 3、在App设置title 闲聊: 看到小黄波浪线了没 就是说默认不支持title字段了 出来的提示, 所以我本来是像下面这样搞的,就是感觉有点难维护,就还是用上面的方法了 …...
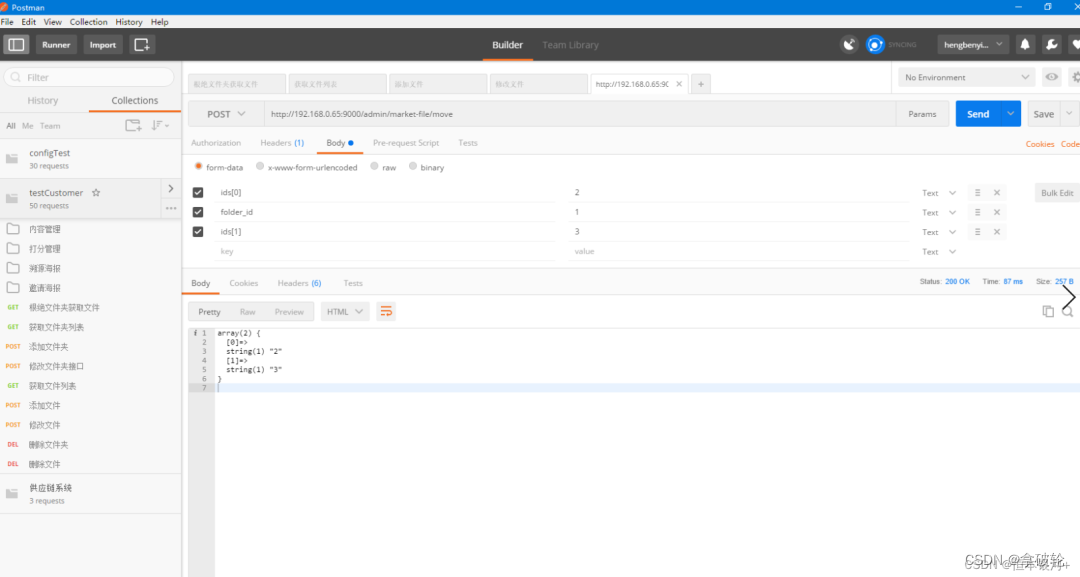
postman测试导入文件
01 上传文件参数 1.选择请求方式 选择post请求方式,输入请求地址 2.填写Headers Key:Content-Type ; Value:multipart/form-data 如下图 3.填写body 选择form-data,key选择file类型后value会出现按钮࿰…...
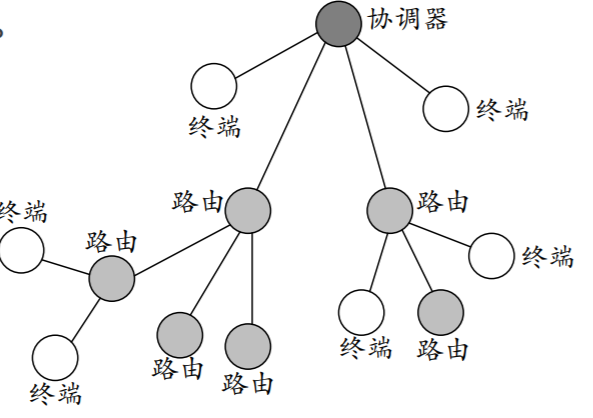
ZigBee学习(一)
文章目录 一、ZigBee介绍二、IEEE 802.15.42.1 物理层2.2 MAC层2.3 如何实现网络和设备寻址2.4 能量管理 三、ZigBee网络拓扑结构四、ZigBee配置参数 一、ZigBee介绍 ZigBee是一种基于IEEE 802.15.4标准的高级通信协议,它被设计用于低速率、低功耗和短距离无线通信&…...

Unity—配置lua环境变量+VSCode 搭建 Lua 开发环境
每日一句:保持须臾的浪漫,理想的喧嚣,平等的热情 Windows 11下配置lua环境变量 一、lua-5.4.4版本安装到本地电脑 链接:https://pan.baidu.com/s/14pAlOjhzz2_jmvpRZf9u6Q?pwdhd4s 提取码:hd4s 二、高级系统设置 此电…...

前端-云点播技术
一、简介 云点播(Cloud Video On Demand)是一种基于云计算平台提供的视频点播服务。这种服务允许用户在需要的时候按需观看视频内容,而无需等待下载完成。以下是一些关于云点播技术的常见特征和要点: 存储和管理: 云存…...
k8s---ingress对外服务(traefik)
目录 ingress的证书访问 traefik traefik的部署方式: deamonset deployment nginx-ingress与traefix-ingress相比较 nginx-ingress-controller ui访问 deployment部署 ingress的证书访问 ingress实现https代理访问: 需要证书和密钥 创建证书 密钥 secre…...

MySQL-SQL-DQL
DQL-介绍 DQL-语法 基本查询 1、查询多个字段 2、设置别名 3、去除重复记录 条件查询 1、语法 2、条件 聚合函数 1、介绍 2、常见的聚合函数 3、语法 分组查询 1、语法 2、where与having区别 排序查询 1、语法 2、排序方式 分页查询 1、语法 DQL-执行顺序...

Docker(十四)Etcd 项目
作者主页: 正函数的个人主页 文章收录专栏: Docker 欢迎大家点赞 👍 收藏 ⭐ 加关注哦! etcd etcd 是 CoreOS 团队发起的一个管理配置信息和服务发现(Service Discovery)的项目,在这一章里面&a…...
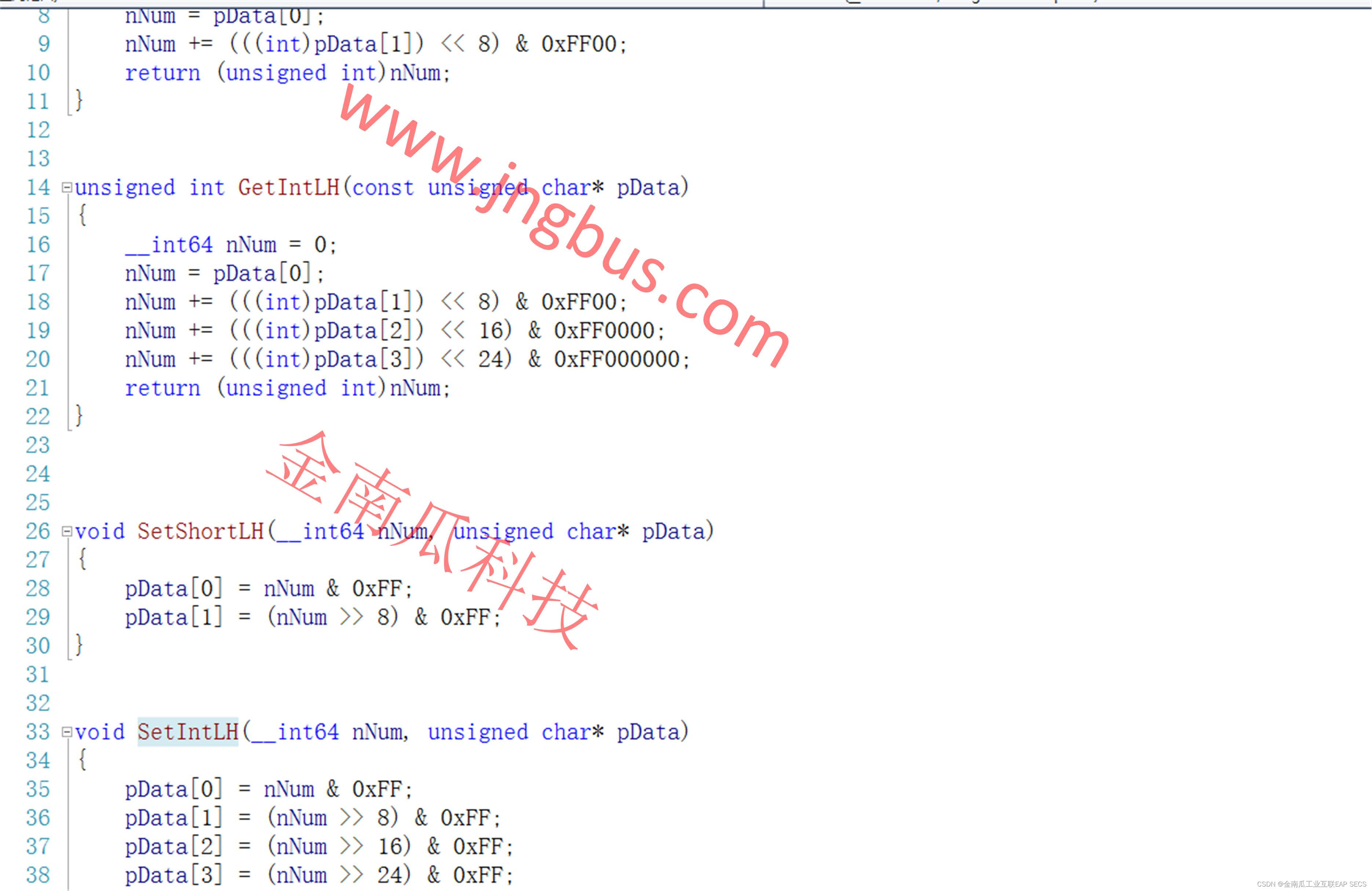
EtherNet/IP开发:C++开发CIP源代码
① 介绍一下CIP CIP是一种考虑到自动化行业而设计的通用协议。然而,由于其开放性,它可以并且已经应用于更多的领域。CIP网络库包含若干卷: 第1卷介绍了适用于所有网络自适应的CIP的常见方面。本卷包含通用对象库和设备配置文件库࿰…...

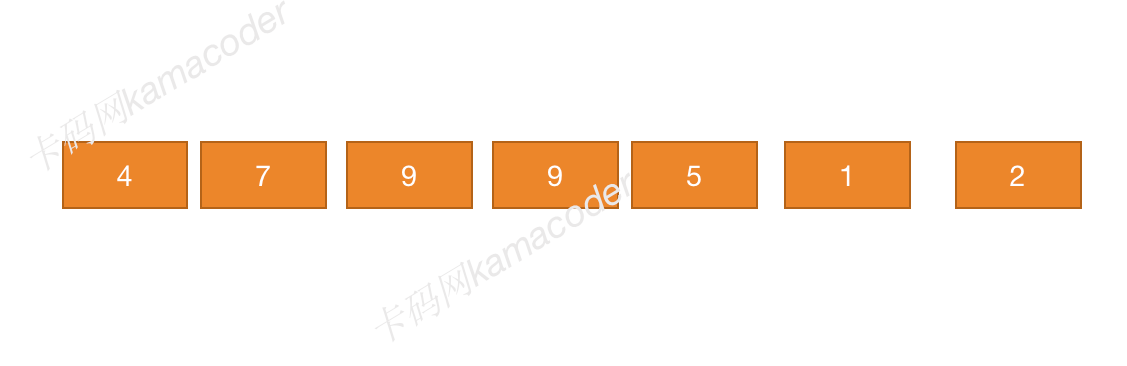
【算法题】68. 文本左右对齐
题目 给定一个单词数组 words 和一个长度 maxWidth ,重新排版单词,使其成为每行恰好有 maxWidth 个字符,且左右两端对齐的文本。 你应该使用 “贪心算法” 来放置给定的单词;也就是说,尽可能多地往每行中放置单词。必…...

基于PyPortal与AirNow API的物联网空气质量监测显示系统实战
1. 项目概述与核心价值如果你对物联网开发感兴趣,或者一直想做一个能摆在桌面上、实时显示环境数据的“小玩意儿”,那么这个基于PyPortal和AirNow API的空气质量监测显示系统,绝对是一个能让你从零到一跑通整个物联网数据流、并且最终获得一个…...

Next.js 14全栈样板工程解析:集成Prisma与NextAuth的现代Web开发实践
1. 项目概述:一个为现代Web应用量身定制的启动器如果你正在寻找一个能让你跳过繁琐的初始化配置,直接进入核心业务逻辑开发的Next.js项目起点,那么nemanjam/nextjs-prisma-boilerplate这个项目很可能就是你需要的。这不是一个简单的“Hello W…...

基于ESP32与Pure Data的无线音乐控制器:从硬件到软件的完整实现
1. 项目概述与核心思路 如果你对用代码做音乐感兴趣,或者玩过像Pure Data、Max/MSP这样的可视化音频编程环境,那你肯定想过一个问题:能不能把物理世界里的动作,比如触摸、倾斜、敲击,直接变成控制音乐的声音参数&#…...

APK Installer完整指南:在Windows电脑上快速安装Android应用的终极解决方案
APK Installer完整指南:在Windows电脑上快速安装Android应用的终极解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经想在Windows电脑上直…...

理发师会被 AI 取代吗?这可能是 AI 时代最有意思的一个社会学问题
今天去理发了。对着镜子,看着我的头发随着剪刀的飞舞一点点掉下来时,我忽然开始神游:AI 会不会取代理发师? 这问题乍一听有点像胡思乱想,可越想越觉得,它其实非常适合拿来当成 AI 时代的一块切片。 因为理发…...

从ST官方例程到产品级Bootloader:STM32F030 IAP的内存划分、中断重映射与APP配置全解析
从ST官方例程到产品级Bootloader:STM32F030 IAP的内存划分、中断重映射与APP配置全解析 在嵌入式产品开发中,固件升级是一个无法回避的挑战。想象一下,当你的设备已经部署在现场,却发现需要修复一个关键bug或添加新功能时…...

如何在DS918+上免费开启Synology Photos人脸识别功能:完整补丁指南
如何在DS918上免费开启Synology Photos人脸识别功能:完整补丁指南 【免费下载链接】Synology_Photos_Face_Patch Synology Photos Facial Recognition Patch 项目地址: https://gitcode.com/gh_mirrors/sy/Synology_Photos_Face_Patch 你是否曾经在群晖DS918…...

大多数癌症没有微生物组?Cell:有还是无,这是个问题
小编导读:这项发表于《Cell》的重磅研究对16,369个肿瘤全基因组进行了系统的微生物信号分析,开发并验证了名为PathSeq-T2T的宿主过滤与去污染流程。研究发现,大多数癌症类型的微生物信号在去污染后与背景无法区分,唯有口消化道癌&…...

终极Windows离线语音识别指南:打造企业级隐私安全的实时字幕系统
终极Windows离线语音识别指南:打造企业级隐私安全的实时字幕系统 【免费下载链接】TMSpeech 腾讯会议摸鱼工具 项目地址: https://gitcode.com/gh_mirrors/tm/TMSpeech 在数字化办公和远程协作日益普及的今天,实时语音转文字技术已成为提升工作效…...

【GNURadio实战解析】采样率转换:从理论到流图搭建的避坑指南
1. 采样率转换的核心概念与实战意义 第一次用GNURadio搭建通信系统时,我被采样率不匹配的问题坑得不轻。当时用48kHz的音频文件直接连接480kHz的调制器,出来的声音就像被加速了10倍的磁带,完全没法听。这就是采样率转换没做好的典型症状。 …...