Ubuntu20.04 安装 ROS noetic + MAVROS
本文在 AlphaCatOvO【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程 基础上,根据实际安装经验,稍微进行补充。
一、安装Ubuntu20.04
假设已经正确安装。
二、安装 ROS noetic
2.1 换源
执行
sudo apt update
sudo mv /etc/apt/sources.list /etc/apt/sources_default.list # 保存原始的万一哪天想要
sudo gedit /etc/apt/sources.list
更改为
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse# 预发布软件源,不建议启用
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
执行
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
否则报错
E: Unable to locate package ros-noetic-desktop-full
执行
sudo apt update
1.2 下载
sudo apt install ros-noetic-desktop-full
按照 鱼香ROS 的教程
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
执行
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
1.3 编译与配置
执行
sudo rosdep init && rosdep update
如果报错 ERROR: default sources list file already exists: 执行
sudo mv /etc/ros/rosdep/sources.list.d/20-default.list /etc/ros/rosdep/sources.list.d/20-default-default.list
执行
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
1.4 测试
第一个窗口执行
roscore
第二个窗口执行
rosrun turtlesim turtlesim_node
第三个窗口运行
rosrun turtlesim turtle_teleop_key
就可以用键盘的按键控制小海龟前后左右了~
三、安装 MAVROS
仅针对要进行PX4开发的人员,其他不做飞控开发无需安装。
执行
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras
sudo /opt/ros/noetic/lib/mavros/install_geographiclib_datasets.sh
——完——
相关文章:
Ubuntu20.04 安装 ROS noetic + MAVROS
本文在 AlphaCatOvO【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程 基础上,根据实际安装经验,稍微进行补充。 一、安装Ubuntu20.04 假设已经正确安装。 二、安装 ROS noetic 2.1 换源 执行 sudo apt update sudo mv /etc/apt/sources.list /etc/apt/…...

【数学笔记】一元n次不等式,分式不等式,绝对值不等式
不等式 基本性质 一元n次不等式一元二次不等式一元高次不等式分式不等式绝对值不等式 基本性质 性质 a > b ⇔ b < a a>b\Leftrightarrow b<a a>b⇔b<a a > b , b > c ⇒ a > c a>b,b>c\Rightarrow a>c a>b,b>c⇒a>c a > b ,…...

转载-android性能优化
android性能优化 Reason: Broadcast of Intent { actandroid.intent.action.TIME_TICK ActivityManager: ANR in com.***.*** PID: 16227 Reason: Broadcast of Intent { actandroid.intent.action.TIME_TICK flg0x50000014 (has extras) }有那么一段时间我被这个ANR折磨到每…...

笔记 | Clickhouse命令行查询
在 ClickHouse 中,可以使用命令行客户端执行查询。默认情况下,ClickHouse 的命令行客户端称为 clickhouse-client。下面是一些基本的步骤和示例,用于使用 clickhouse-client 进行查询。 首先,需要确保已经安装了 ClickHouse 服务…...

Dockerfile-xxxx
1、Dockerfile-server FROM openjdk:8-jdk-alpine WORKDIR /app COPY . . CMD java -Xms1536M -Xmx1536M -XX:UseG1GC -jar -Dlog4j2.formatMsgNoLookupstrue -Dloader.pathresources,lib -Duser.timezoneGMT-05 /app/server-main-1.0.0.jar 2、Dockerfile-bgd #FROM openjdk…...

Vue中的$attrs
今天产品经理要求做保留某组件全部功能,还要在它的基础上增加东西。如果不嫌麻烦的话就笨办法,但是想一下怎么只用少量代码高效的二次封装组件呢 Vue中的$attrs 在 Vue2 中,attr 是指组件接收的 HTML 特性(attribute),通过 prop…...

使用阿里云的oss对象存储服务实现图片上传(前端vue后端java详解)
一:前期准备: 1.1:注册阿里云账号,开启对象存储oss功能,创建一个bucket(百度教程多的是,跟着创建一个就行,创建时注意存储类型是标准存储,读写权限是公共读)…...

python实例100第32例:使用a[::-1]按相反的顺序输出列表的值
题目:按相反的顺序输出列表的值。 程序分析: a[n:-n]作用是去除前n个元素和末n个元素a[-n]作用是取倒数第n个元素a[:-n]的作用是去除后n个元素a[::-1]的作用是将所有元素逆序排列a[n::-1] 的作用是从第n个元素截取后逆序排列 程序…...

python执行脚本的时候获取输入参数
当我们执行脚本的时候,通常都会执行 python test.py -i xxx -o xxx,这里的 -i 和 -o 都是输入参数,这到底是怎么传递的呢? 本文纯粹记录一下 import argparseif __name__ __main__:print("hello")# 创建AugumentParser…...

Halcon指定区域的形状匹配
Halcon指定区域的形状匹配 文章目录 Halcon指定区域的形状匹配1.在参考图像中选择目标2.创建模板3.搜索目标 在这个实例中,会介绍如何根据选定的ROI选择合适的图像金字塔参数,创建包含这个区域的形状模板,并进行精确的基于形状模板的匹配。最…...
Linux——常用命令
1、命令的基本格式 对服务器来讲,图形界面会占用更多的系统资源,而且会安装更多的服务、开放更多的端口,这对服务器的稳定性和安全性都有负面影响。其实,服务器是一个连显示器都没有的家伙,要图形界面干什么ÿ…...
外包干了2个月,技术反而退步了...
先说一下自己的情况,本科生,19年通过校招进入广州某软件公司,干了接近4年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落!而我已经在一个企业干了四年的功能测试…...
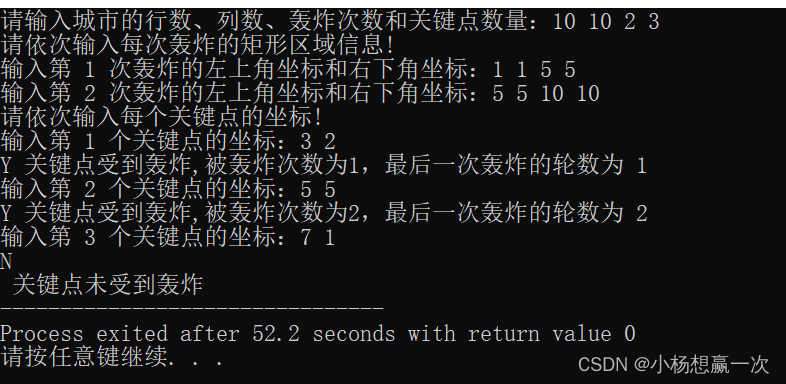
洛谷C++简单题练习day6—P1830 城市轰炸
day6--P1830 城市轰炸--1.26 习题概述 题目背景 一个大小为 nm 的城市遭到了 x 次轰炸,每次都炸了一个每条边都与边界平行的矩形。 题目描述 在轰炸后,有 y 个关键点,指挥官想知道,它们有没有受到过轰炸,如果有&a…...

【linux-interconnect】What NVIDIA MLNX_OFED is?
NVIDIA MLNX_OFED Documentation v23.07 - NVIDIA Docs 文章目录 What NVIDIA MLNX_OFED is?Overview[Software Download](https://docs.nvidia.com/networking/display/mlnxofedv23070512#src-2396583107_NVIDIAMLNX_OFEDDocumentationv23.07-SoftwareDownload) Wh…...

Unity开发中的XML注释
在Unity开发中,XML注释主要用于C#脚本的注释,以帮助生成代码文档和提供IntelliSense功能。以下是一些关于如何使用XML注释的技巧: 创建注释: 在C#中,XML注释是由///或/**...*/开始的。例如 /// <summary> /// 这…...

[MQ]常用的mq产品图形管理web界面或客户端
一、MQ介绍 1.1 定义 MQ全称为Message Queue,消息队列是应用程序和应用程序之间的通信方法。 如果非要用一个定义来概括只能是抽象出来一些概念,概括为跨服务之间传递信息的软件。 1.2 MQ产品 较为成熟的MQ产品:IBMMQ(IBM We…...
)
JWT令牌(JSON Web Token)
目录 1 前言 2 JWT令牌的组成 3 使用步骤举例 3.1 pom.xml中引入依赖 3.2 JWT生成 3.3 JWT验证 4 实践中的使用举例 4.1 拦截非法访问 4.1.1 编写为工具类 4.1.2 下发给用户 4.1.3 编写拦截器 4.1.4 注册拦截器 4.2 获取相关数据提升效率 1 前言 在我们编写的后端…...
华硕ASUS K43SD笔记本安装win7X64(ventoy为入口以支撑一盘多系统);友善之臂mini2440开发板学习
记录 老爷机 白色 华硕 K43SD 笔记本 安装 win7X64 1. MBR样式常规安装win7X64Sp1 (华硕 K43SD 安装 win7X64 ) 老爷机 白色 华硕 K43SD 笔记本 安装 win7X64 (常规安装) 设置: 禁用UEFI 启用AHCI ventoy制作MBR(非UEFI)方式的启动U盘 U盘中放cn_windows_7_ultimate_wit…...
)
npm设置源(原淘宝源域名已过期)
今天打包机器报错, Couldnt find package "antd-mobile2.3.4" required by "neo-ui-mf-base1.0.41" on the "npm" registry. 找不到antd mobile的包,查看源发现淘宝域名npm.taobao.org 和 registry.npm.taobao.org 域名…...
操作系统-进程通信(共享存储 消息传递 管道通信 读写管道的条件)
文章目录 什么是进程通信为什么进程通信需要操作系统支持共享存储消息传递直接通信方式间接通信方式 管道通信小结注意 什么是进程通信 分享吃瓜文涉及到了进程通信 进程通信需要操作系统支持 为什么进程通信需要操作系统支持 进程不能访问非本进程的空间 当进程P和Q需要…...

2016年FPGA市场格局:巨头并购、技术演进与工程师实战指南
1. 2016年FPGA市场格局:一场没有悬念的卫冕战聊起2016年的FPGA市场,就像看一场结局早已注定的体育比赛。赛灵思(Xilinx)毫无悬念地再次登顶年度营收榜首,这已经是它连续十几年稳坐头把交椅了。根本不需要什么复杂的财务…...
 的6个高阶用法,数据分析师必看)
别再只会用0填充了!Pandas DataFrame.fillna() 的6个高阶用法,数据分析师必看
别再只会用0填充了!Pandas DataFrame.fillna() 的6个高阶用法,数据分析师必看 在数据分析的日常工作中,缺失值处理就像是一道无法回避的数学题。许多刚入行的分析师会条件反射般地输入.fillna(0),这就像用创可贴处理所有伤口——有…...

LangChain集成MCP协议:构建模块化AI应用的新范式
1. 项目概述:当LangChain遇见MCP,构建下一代AI应用的新范式如果你最近在捣鼓LangChain,想给AI应用加点“料”,比如让它能实时查询数据库、调用外部API,甚至控制智能家居,那你大概率会遇到一个核心痛点&…...

利用Taotoken模型广场为不同AI应用场景挑选合适模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken模型广场为不同AI应用场景挑选合适模型 面对文本生成、代码审查、智能对话、翻译等多样化的AI应用场景,如…...

Windows Cleaner终极指南:3步解决C盘爆红和电脑卡顿难题
Windows Cleaner终极指南:3步解决C盘爆红和电脑卡顿难题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款专为Windows系统设计的…...

新手入门教程使用curl命令直连Taotoken测试大模型聊天补全接口
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手入门教程:使用curl命令直连Taotoken测试大模型聊天补全接口 本文面向刚接触API调用的开发者,旨在指导如…...

高海拔环境下的硬件设计挑战与GPS定位故障分析
1. 从数据记录到真实体验:高海拔环境下的技术挑战作为一名电子工程师,我习惯了在实验室里与精密的仪器和数据打交道,一切都在可控范围内。但当你带着自己设计的设备,踏上非洲之巅乞力马扎罗的征途时,现实会给你上一堂生…...

保姆级教程:用Intel官方工具搞定Realsense D435深度不准和黑点问题
深度视觉优化实战:Intel RealSense D435深度校准全流程解析 刚拆封的RealSense D435摄像头在深度模式下出现零星黑点?深度图某些区域数值明显失真?这些问题往往不是硬件缺陷,而是出厂校准参数与实际使用环境不匹配导致的。作为计算…...

Android系统开发避坑:为什么你改了config.xml,导航栏还是不显示?
Android系统导航栏显示失效的深度排查指南 当你熬夜修改了config.xml文件,满怀期待地刷入系统,却发现导航栏依然不见踪影——这种挫败感我太熟悉了。导航栏显示问题看似简单,实则涉及Android资源覆盖机制的复杂层级。本文将带你深入AOSP的底层…...

避坑指南:用Qt为STM32项目写上位机时,我遇到的5个串口和界面难题
避坑指南:用Qt为STM32项目写上位机时,我遇到的5个串口和界面难题 第一次用Qt给STM32开发上位机时,我以为串口通信不过是简单的数据收发,界面设计拖拖控件就能搞定。直到项目进度被各种诡异bug拖慢两周后,才意识到自己踩…...