Arduino和MPLAB X 开发STM32F103和PIC16F15376
要点:
- 使用Arduino开发STM32F103(Blue Pill),MPLAB X 开发PIC16F15376(Curiosity Nano)
- C/C++嵌入式开发
- ESP32(Arduino、ESP-IDF)和STM32实时操作系统FreeRTOS
STM32使用FreeRTOS示例
在使用 FreeRTOS 时,您应该记住一些术语差异。 FreeRTOS 中的“任务”是一个程序的一部分,可以与同一程序中的其他部分同时运行。 如果您做过其他并发编程,它类似于“线程”。 但是,请注意,CMSIS-RTOS(我们的 RTOS 的抽象层)将这些并发部分称为“线程”。 因此,您可能会看到它们在整个程序中互换使用,即使它们的含义并不完全相同。
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;
osThreadId_t blink01Handle;
osThreadId_t blink02Handle;/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
void StartBlink01(void *argument);
void StartBlink02(void *argument);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART2_UART_Init();osKernelInitialize();const osThreadAttr_t blink01_attributes = {.name = "blink01",.priority = (osPriority_t) osPriorityNormal,.stack_size = 128};blink01Handle = osThreadNew(StartBlink01, NULL, &blink01_attributes);/* definition and creation of blink02 */const osThreadAttr_t blink02_attributes = {.name = "blink02",.priority = (osPriority_t) osPriorityBelowNormal,.stack_size = 128};blink02Handle = osThreadNew(StartBlink02, NULL, &blink02_attributes);osKernelStart();while (1){}}void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Initializes the CPU, AHB and APB busses clocks */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = 1;RCC_OscInitStruct.PLL.PLLN = 10;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2;PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK){Error_Handler();}
}static void MX_USART2_UART_Init(void)
{huart2.Instance = USART2;huart2.Init.BaudRate = 115200;huart2.Init.WordLength = UART_WORDLENGTH_8B;huart2.Init.StopBits = UART_STOPBITS_1;huart2.Init.Parity = UART_PARITY_NONE;huart2.Init.Mode = UART_MODE_TX_RX;huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart2.Init.OverSampling = UART_OVERSAMPLING_16;huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart2) != HAL_OK){Error_Handler();}}static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOC_CLK_ENABLE();__HAL_RCC_GPIOH_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);/*Configure GPIO pin : B1_Pin */GPIO_InitStruct.Pin = B1_Pin;GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);/*Configure GPIO pin : LD2_Pin */GPIO_InitStruct.Pin = LD2_Pin;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);}/* USER CODE END Header_StartBlink01 */
void StartBlink01(void *argument)
{/* USER CODE BEGIN 5 *//* Infinite loop */for(;;){HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);osDelay(500);}// In case we accidentally exit from task looposThreadTerminate(NULL);/* USER CODE END 5 */
}/* USER CODE END Header_StartBlink02 */
void StartBlink02(void *argument)
{for(;;){HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);osDelay(600);}// In case we accidentally exit from task looposThreadTerminate(NULL);/* USER CODE END StartBlink02 */
}void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{/* USER CODE BEGIN Callback 0 *//* USER CODE END Callback 0 */if (htim->Instance == TIM6) {HAL_IncTick();}/* USER CODE BEGIN Callback 1 *//* USER CODE END Callback 1 */
}void Error_Handler(void)
{}#ifdef USE_FULL_ASSERTvoid assert_failed(char *file, uint32_t line)
{ }
#endif /* USE_FULL_ASSERT */在 main() 的开头,您应该看到由 CubeMX 设置的为我们定义的线程。 请注意,我们将入口函数名称传递给 osThreadNew() 函数,一旦我们调用 osKernelStart(),该函数就会调用这些函数。 一旦 osKernelStart() 被调用,我们不希望在 main() 中的后面有任何代码,因为理想情况下,程序应该永远不会从 osKernelStart() 返回。
此时,我们的线程应该同时运行,具有自己的设置代码和永远的 while 循环。还有一个正在运行的后台调度程序任务,它负责在线程之间切换上下文。
StartBlink01() 和 StartBlink02() 是我们的线程。 每个都有自己的永远循环,并且它们应该同时运行。 虽然它们在我们的单核处理器中无法占用相同的空间和时间,但调度程序会切换它们,让我们看起来像是同时运行 2 个线程。
请注意,我们需要使用 osDelay(),而不是 HAL_Delay()。 高优先级任务中的 HAL_Delay() 可能会占用处理器,从而阻止上下文切换。 它还可以防止调度程序空闲,从而节省电量。 因此,我们使用 osDelay() 告诉调度程序在等待期间可以切换到不同的任务。
我们对blink01 和blink02 使用不同的延迟时间,以便这两个任务争夺LED 的切换。
开发环境
本文中描述的两个微控制器板(Blue Pill 和 Curiosity Nano)可以使用不同的 IDE 进行编程。 IDE是一种编程和调试软件工具,包括代码编辑器、编译环境、调试选项等。 许多 IDE 还用于通过 USB 端口连接将编译后的程序上传到微控制器板。
- Arduino IDE:这个免费的 IDE 最初是为了对 Arduino 微控制器板进行编程而创建的,但如果您为其安装了库,您也可以使用它来对 Blue Pill 微控制器板进行编程。
- MPLAB X IDE:由 Curiosity Nano 制造商 Microchip 制造。 这是对 Curiosity Nano 进行编程所需的免费 IDE。
Arduino和MPLAB X案例
- 按钮开关LED
- 用光敏电阻测量光量
- 温湿度测量
- 使用 LED 显示的莫尔斯电码 SOS 视觉警报
- 创建拍手开关
- 气体检测器
- 互联网温度记录仪
- 物联网花盆湿度传感器
- 物联网太阳能(电压)测量
- 数字体温测量(温度计)
- 社交距离警报
- 20 秒洗手计时器
ESP32和STM32实时操作系统FreeRTOS
ESP32(Arduino)多任务FreeRTOS
- 队列管理
- 更改任务的优先级
- 如何使用FreeRTOS结构队列接收多个任务的数据
- 如何使用 vTaskDelete() API 删除任务
- 使用队列集
- 创建带队列的邮箱
- 创建一次性和自动重新加载定时器
- 二进制信号量 – 使用 Arduino 进行任务中断同步的示例
- 使用 Arduino 计数信号量示例
- 斥教程 – 避免优先级反转
- 递归互斥以避免死锁
- 使用 Arduino 的 FreeRTOS 中断管理示例
ESP-IDF示例FreeRTOS
STM32开发调试FreeRTOS
参阅一: 亚图跨际
参阅二:亚图跨际
相关文章:

Arduino和MPLAB X 开发STM32F103和PIC16F15376
要点: 使用Arduino开发STM32F103(Blue Pill),MPLAB X 开发PIC16F15376(Curiosity Nano)C/C嵌入式开发ESP32(Arduino、ESP-IDF)和STM32实时操作系统FreeRTOS STM32使用FreeRTOS示例 在使用 FreeRTOS 时&a…...

手机操作系统Android
▶1.Android系统概述 Andaid(读[安卓)由Coosle公司和开放手机联盟共同开发,它是基于Lmx内核的开源操作系统。Andtoid主要用于移动设备,如智能手机和平板计算机。2008年发布了第一部Andtoid智能手机,以后Android逐渐扩展到平板计算机、电视、…...

2024年,你是否还在迷茫?
2024年,你是否还在迷茫? 别担心!鸿蒙来了,这个未来技术的制高点,为你提供了答案! 诸多大厂疯抢、24年预计鸿蒙相关的岗位需求将达到百万级、就业均薪达到19K,全国高校开课…… 种种现象都在表…...
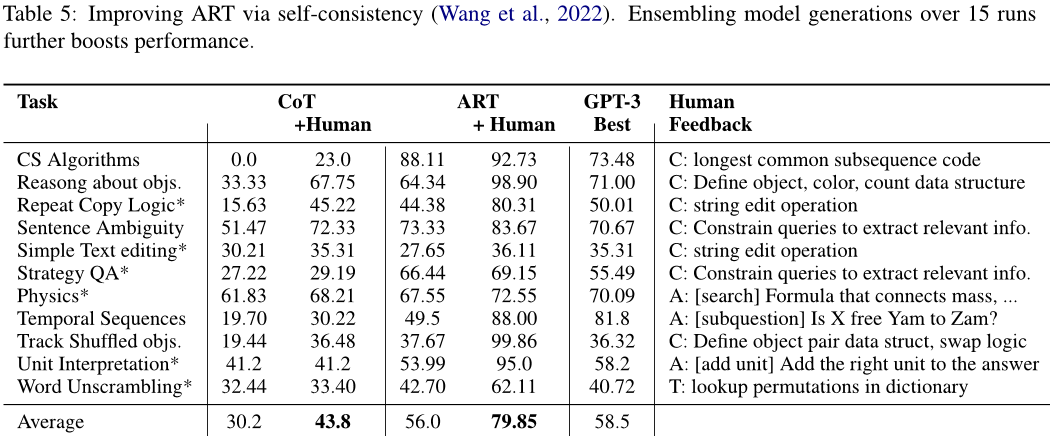
ART: Automatic multi-step reasoning and tool-use for large language models 导读
ART: Automatic multi-step reasoning and tool-use for large language models 本文介绍了一种名为“自动推理和工具使用(ART)”的新框架,用于解决大型语言模型(LLM)在处理复杂任务时需要手动编写程序的问题。该框架可…...

Github 2024-01-26 开源项目日报Top10
根据Github Trendings的统计,今日(2024-01-26统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Python项目4Jupyter Notebook项目2HTML项目1Shell项目1Dockerfile项目1非开发语言项目1Go项目1Rust项目1 高级…...
免费的 UI 设计资源网站 Top 8
今日与大家分享8个优秀的免费 UI 设计资源网站。这些网站的资源包括免费设计材料站、设计工具、字体和其他网站,尤其是一些材料站。它们是免费下载的,材料的风格目前很流行,适合不同的项目。非常适合平面设计WEB/UI设计师收藏,接下…...

人机协同对人工智能治理的影响
人机协同对人工智能治理的影响是多方面的。 首先,人机协同可以提供更有效的人工智能监管和治理机制。人工智能系统通常需要大量的数据来训练和运行,而人类在监管和治理方面有独特的能力。通过人机协同,人们可以利用他们的主观意见和专业知识来…...

Form.List的使用,设置某个字段的值
1.Form.Item的name <Form.Itemname{[base_range, company_base_range_start]}dependencies{[[base_range, company_base_range_end]]}rules{[{ required: true, message: 请输入下限 },{validator: (_, value) >validateMoneyRule(value,base_range?.company_base_range…...

React16源码: React中的updateHostComponent的源码实现
updateHostComponent 1 )概述 在 completeWork 阶段的 HostComponent 处理,继续前文所述在更新的逻辑里面,调用了 updateHostComponent进行前后props对应的dom的attributes变化的对比情况这个方法也是根据不同环境来定义的,我们这…...
uniapp导入uView组件库
目录 准备工作 1. 新建一个项目 2. 导入uview组件库 3. 关于SCSS 配置步骤 1. 引入uView主JS库 2. 在引入uView的全局SCSS 3. 引入uView基础样式 4. 配置easycom组件模式 添加效果实验运行即可成功 准备工作 1. 新建一个项目 2. 导入uview组件库 在进行配置之前&#x…...

防御保护----防火墙的安全策略、NAT策略实验
实验拓扑: 实验要求: 1.生产区在工作时间(9:00-18:00)内可以访问DMZ区,仅可以访问http服务器; 2.办公区全天可以访问DMZ区,其中10.0.2.10可以访问FTP服务器和HTTP服务器…...
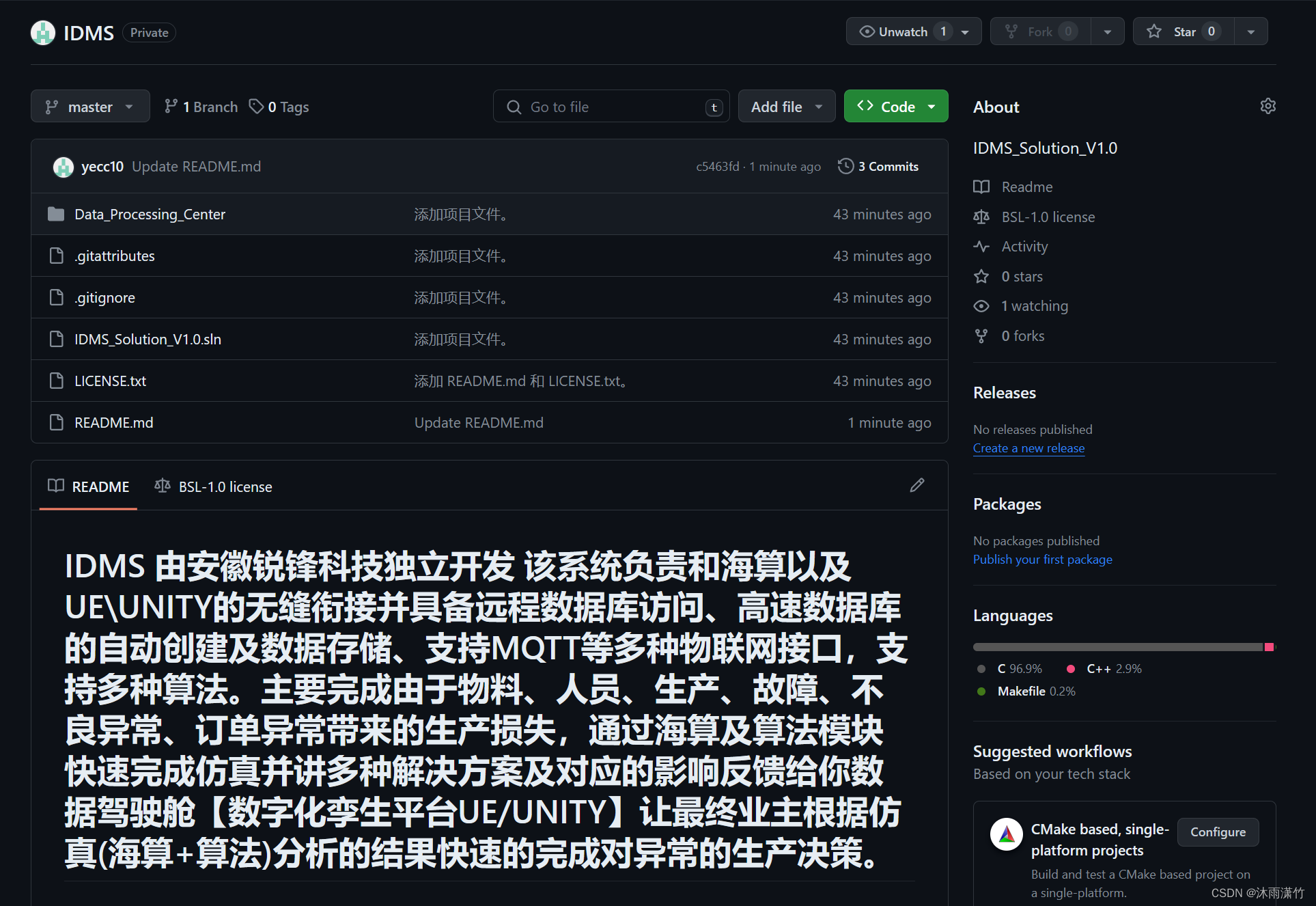
# 安徽锐锋科技IDMS系统简介
IDMS 由安徽锐锋科技独立开发 该系统负责和海算以及UE\UNITY的无缝衔接并具备远程数据库访问、高速数据库的自动创建及数据存储、支持MQTT等多种物联网接口,支持多种算法。主要完成由于物料、人员、生产、故障、不良异常、订单异常带来的生产损失,通过海…...

Notepad在文件中查找多行相同内容的文字
Notepad在文件中查找多行相同的内容 查找:打开 Notepad软件, Ctrl F 查找 。输入关键词, 点击【在当前文件中查找】。 复制:直接在下方的【搜索结果】复制。 Notepad提取含有特定字符串的行 详情见: https://blog…...

Python高超音速导弹
Python高超音速导弹的全自动化开发研发具有重要性的原因如下: 提高研发效率:全自动化开发可以通过自动化工具和流程,快速完成各种任务,包括代码编写、测试、集成和部署等。这样可以大大提高研发效率,缩短开发周期。 减…...
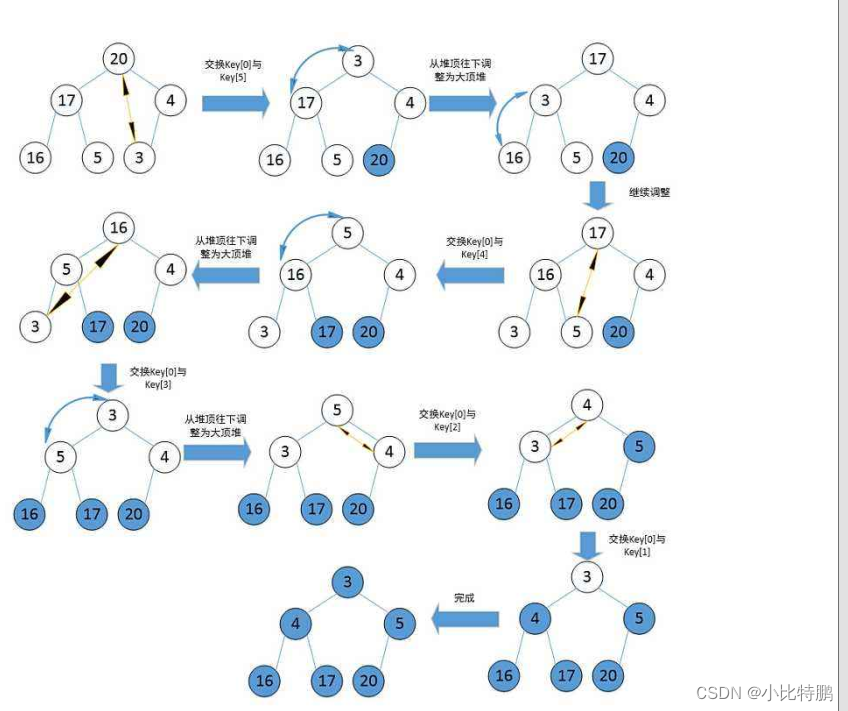
Java七大排序详解
排序 排序的概念 所谓排序 ,就是让一串记录,按照其中某些或者某个关键字的大小,递增或递减的排列起来的操作。 稳定性:就比如在待排序的序列中,存在多个具有相同关键字的记录 ,如果经过排序这些相同的关键…...

图像旋转角度计算并旋转
#!/usr/bin/python3 # -*- coding: utf-8 -*- import cv2 import numpy as np import timedef Rotate(img, angle0.0,fill0):"""旋转:param img:待旋转图像:param angle: 旋转角度:param fill:填充方式,默认0黑色填充:return: img: 旋转后…...
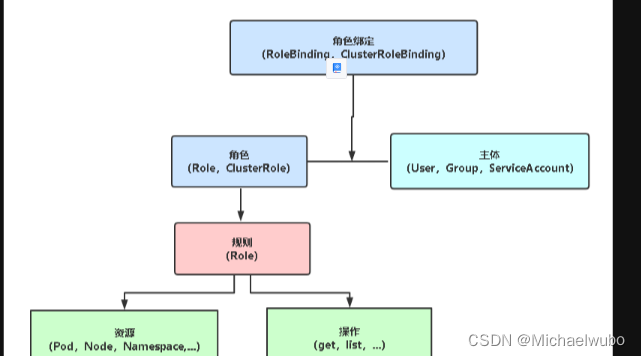
通过curl访问k8s集群获取证书或token的方式
K8S安全控制框架主要由下面3个阶段进行控制,每一个阶段都支持插件方式,通过API Server配置来启用插件。 1. Authentication(认证) 2. Authorization(授权) 3. Admission Control(准入控制&#…...
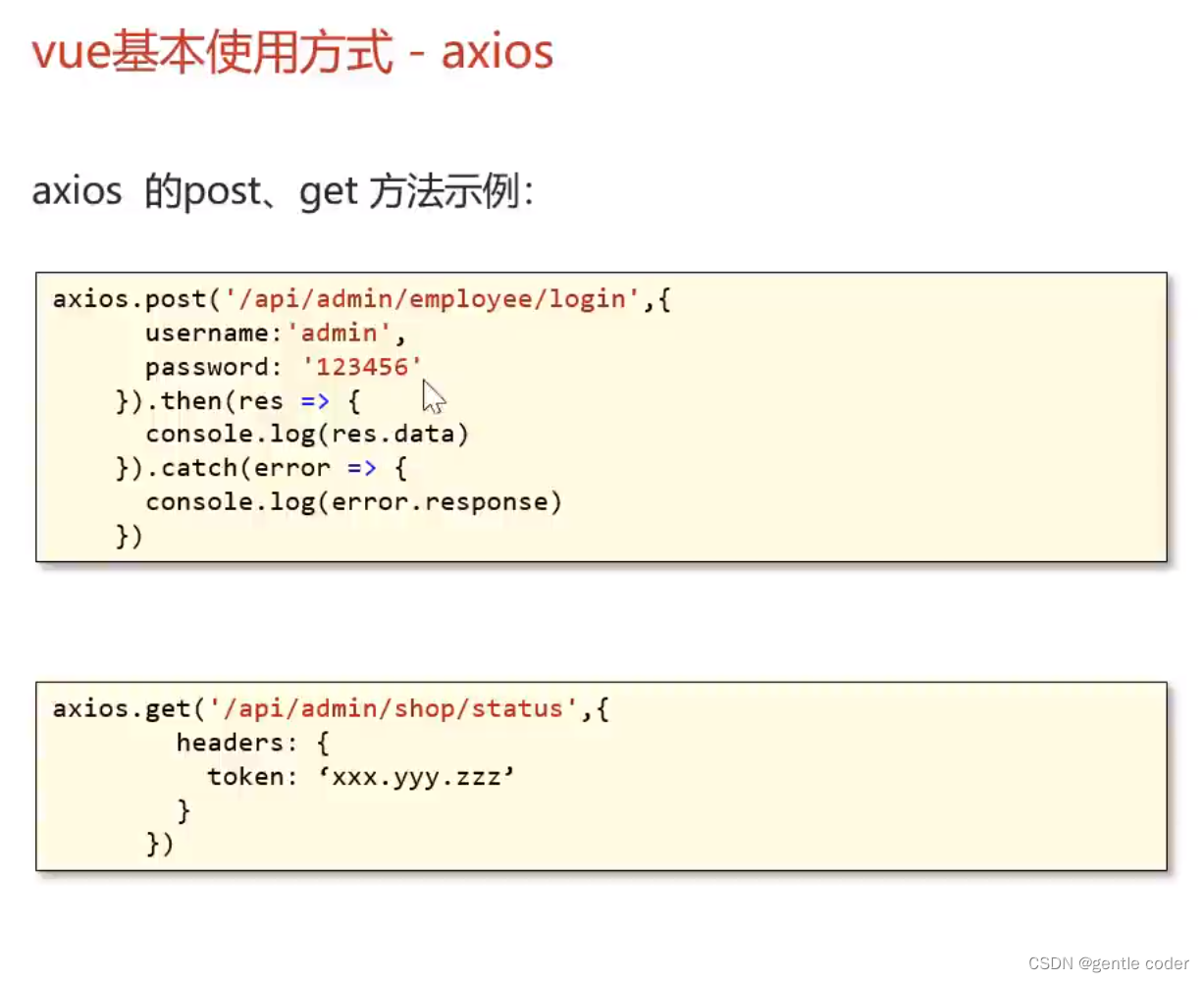
苍穹外卖-前端部分(持续更新中)
d 第二种:cmd中输入 vue ui进入图形化界面选择npm,vue2进行创建 先将创建的Vue框架导入Vsocde开发工具 然后ctrshiftp 输入npm 点击serve将项目启动 下这种写法跨域会报错: 解决方法:...
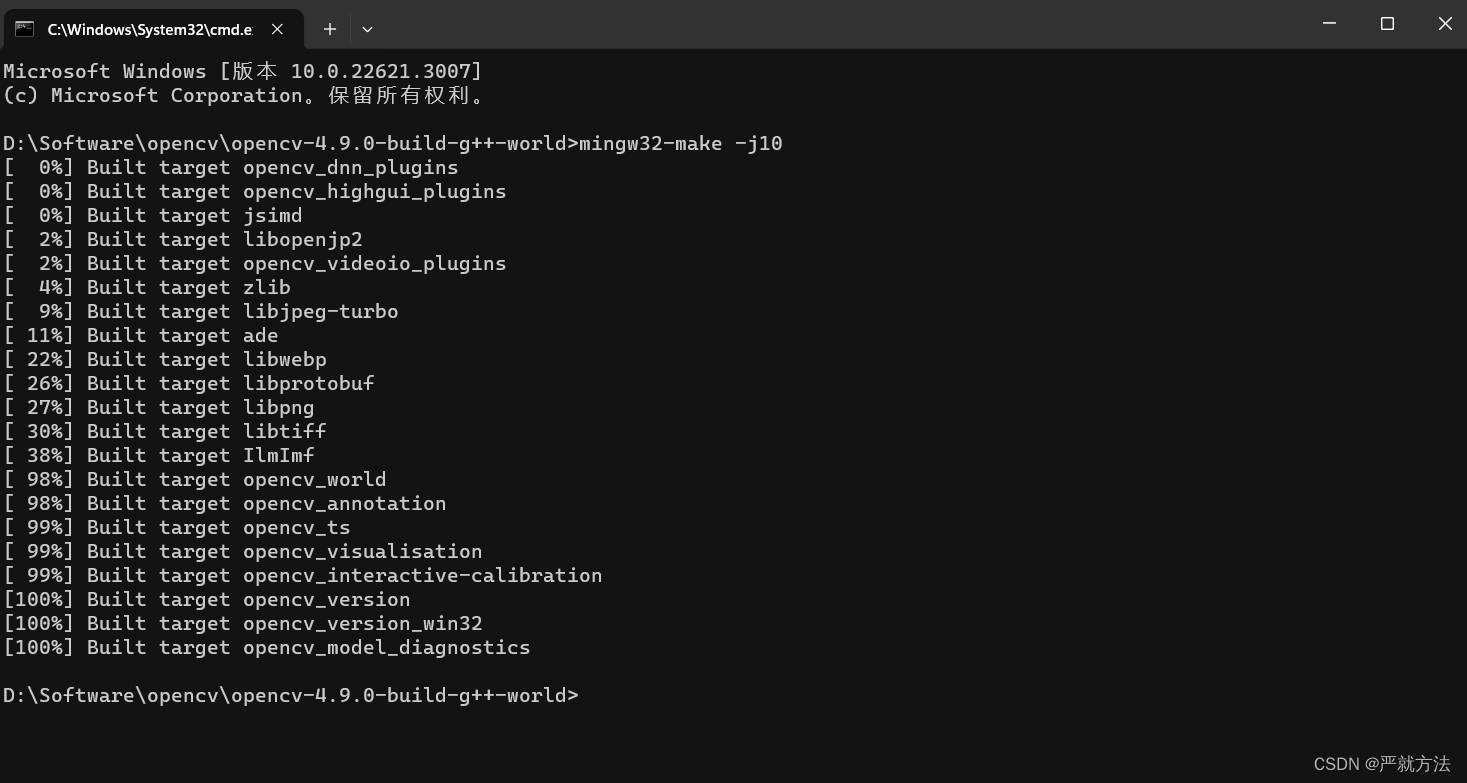
windows用mingw(g++)编译opencv,opencv_contrib,并install安装
windows下用mingw编译opencv貌似不支持cuda,选cuda会报错,我无法解决,所以没选cuda,下面两种编译方式支持。 如要用msvc编译opencv,参考我另外一篇文章 https://blog.csdn.net/weixin_44733606/article/details/1357…...
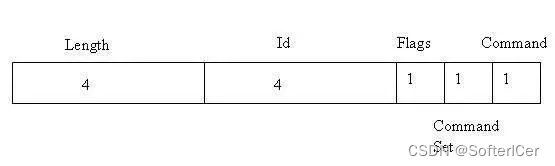
JDWP 协议及实现
JDWP 的协议细节并通过实际调试中的例子展开揭示 JDWP 的实现机制,JDWP 是 Java Debug Wire Protocol 的缩写,它定义了调试器(debugger)和被调试的 Java 虚拟机(target vm)之间的通信协议。 JDWP 协议介绍 这里首先要说明一下 debugger 和 target vm。Target vm 中运行…...

SAP物料主数据维护时,计量单位从Z变成ZA?一文搞懂CUNI配置与转换例程
SAP计量单位转换机制深度解析:从Z到ZA的幕后逻辑 引言 在SAP系统中维护物料主数据时,许多用户都曾遇到过这样的困惑:明明在MM02事务中输入的计量单位是"Z",保存后查询数据库却发现变成了"ZA"。这种现象并非系…...

ClawSpark:一键部署私有AI智能体,实现本地化智能助手
1. 项目概述:ClawSpark,一键部署的私有AI智能体如果你和我一样,对AI智能体(Agent)的潜力感到兴奋,但又对将个人数据、工作流程乃至核心业务逻辑完全托付给云端API心存疑虑,那么ClawSpark的出现&…...

Pearcleaner:彻底清理Mac应用的终极免费开源解决方案
Pearcleaner:彻底清理Mac应用的终极免费开源解决方案 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 在Mac系统中卸载应用程序后,你是…...

Lie群方法在机器人状态估计中的创新应用
1. 状态估计技术演进与Lie群方法的核心价值在机器人导航与定位领域,状态估计技术扮演着大脑的角色。想象一下,当你在陌生城市使用手机导航时,系统需要实时融合GPS、陀螺仪和加速度计的数据来确定你的位置——这正是状态估计的典型应用场景。传…...

LT8650S双通道同步降压稳压器设计与汽车电子应用
1. LT8650S双通道同步降压稳压器设计解析在汽车电子和工业设备领域,电源管理系统的设计往往面临严苛挑战。LT8650S作为一款42V输入、双通道4A输出的同步降压稳压器,其Silent Switcher 2架构和6.2μA超低静态电流特性,为工程师提供了高性价比的…...

收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南
收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南 文章探讨了AI对程序员行业的影响,指出AI抢走了程序员一半的饭碗,但也为另一半人打开了高阶职场的大门。初级岗位因AI工具普及而面临失业风险,但高级技术…...

Odoo开源频道应用:构建企业级内容管理系统的完整指南
1. 项目概述:一个为Odoo生态注入活力的开源频道应用如果你是一名Odoo开发者或实施顾问,肯定遇到过这样的场景:客户需要一个功能强大、界面现代的“新闻”或“博客”模块,但Odoo原生的“网站博客”应用要么功能过于基础,…...

Java 程序员第 4 阶段:入门 Embedding 向量嵌入,弄懂大模型语义底层逻辑
前言Embedding(向量嵌入) 是大模型理解语义的核心技术,也是构建 RAG、知识库、语义搜索的基础。理解 Embedding 的原理,是进阶大模型开发的关键。本篇文章将深入讲解 Embedding 向量嵌入技术,从原理到 Java 实现&#…...

无国界技术创业:构建全球化产品支持与远程协作体系
1. 从“车库”到“云端”:无国界创业的底层逻辑变迁 十年前,如果你在硅谷创立一家芯片设计工具(EDA)或嵌入式软件公司,头两年的客户拜访路线图大概就是101号公路沿线。工程师可以早上开车去圣何塞的客户办公室…...

如何在3分钟内实现iOS设备虚拟定位?iFakeLocation实战指南
如何在3分钟内实现iOS设备虚拟定位?iFakeLocation实战指南 【免费下载链接】iFakeLocation Simulate locations on iOS devices on Windows, Mac and Ubuntu. 项目地址: https://gitcode.com/gh_mirrors/if/iFakeLocation 在iOS应用开发与测试中,…...