IMU/捷联惯导常见的术语,以及性能评价标准(附Python解析代码)
0. 简介
现在的机器人领域在普遍使用IMU(惯性导航单元)。该系统有三个加速度传感器与三个角速度传感器(陀螺)组成,加速度计用来感受飞机相对于地垂线的加速度分量,陀螺仪用来感知飞机的角速率变化;通过算法融合来计算出飞行器姿态,也用来进行航位推算。而每次我们拿到一个惯性导航的时候会发现参数手册中有很多信息,而这些信息的好坏要怎么评判是比较关键的。下面我们来一一讲解。
1. 最大零点偏移
1.1 含义
IMU(惯性测量单元)的最大零点偏移是指在没有外部力或加速度作用下,IMU输出的测量值与真实值之间的差异。它是由于传感器的制造误差、温度变化、机械振动等因素引起的。
IMU的最大零点偏移是一个统计值,表示在一定的置信水平下,IMU输出值与真实值之间的最大差异。
1.2 指标
对于低成本的消费级IMU,其最大零点偏移范围可能在几个百分比以内,例如加速度计的零点偏移范围可能在±2%以内(对应就是±20mg),陀螺仪的零点偏移范围可能在±5°/s以内。
高精度的工业级或航空航天级IMU,其最大零点偏移范围会更小,通常在几个千分比以内。例如,加速度计的零点偏移范围可能在±0.1%(对应就是±1mg)以内,陀螺仪的零点偏移范围可能在±0.1°/s以内
2. 温度偏移
2.1 含义
IMU的温度偏移是指在不同温度下,IMU输出的测量值与真实值之间的差异。温度偏移是由于传感器的温度敏感性引起的,温度变化会影响传感器的性能和精度。
温度偏移通常以每度或每十度为单位,例如每度的温度偏移为X,表示每增加或减少1度时,IMU输出值可能会相应地增加或减少X。
2.2 指标
消费级IMU的温度偏移范围可能在几个百分比以内,例如加速度计的温度偏移范围可能在±0.2%(对应就是±2mg)以内,陀螺仪的温度偏移范围可能在±0.5°/s以内。
而高精度的工业级或航空航天级IMU的温度偏移范围会更小,通常在几个千分比以内。例如,加速度计的温度偏移范围可能在±0.05%(对应就是±0.5mg)以内,陀螺仪的温度偏移范围可能在±0.1°/s以内。
3. 零偏稳定性
3.1 含义
在零输入状态下的长时间稳态输出是一个平稳的随机过程,即稳态输出将围绕均值(零偏)起伏和波动,习惯上用均方差来表示,这种均方差被定义为零偏稳定性。
零偏漂移是指IMU测量值与真实值之间的偏差随时间的变化。通常,零偏漂移以每小时、每分钟或每秒钟的角度或速度单位来表示。
3.2 指标
加速度计:一般来说,高精度的加速度计的零偏稳定性可以达到几微米每秒平方(µg)级别。典型的高性能加速度计的零偏漂移可能在1 µg或更低。
陀螺仪:高精度的陀螺仪的零偏稳定性一般在几度每小时(°/hr)或更低。典型的高性能陀螺仪的零偏漂移可能在0.01°/hr或更低。
4. 灵敏度
4.1 含义
IMU的灵敏度是指传感器对于输入信号的变化的响应能力。对于加速度计来说,灵敏度表示单位输入加速度变化对应的传感器输出变化;对于陀螺仪来说,灵敏度表示单位输入角速度变化对应的传感器输出变化。
4.2 指标
加速度计:一般的加速度计灵敏度范围可达到几百到几千mV/g(毫伏每重力单位)。高精度的加速度计可能具有更低的灵敏度,可达到几十到几百mV/g。
陀螺仪:一般的陀螺仪灵敏度范围可达到几十到几百mV/°/s(毫伏每度每秒)。高精度的陀螺仪可能具有更低的灵敏度,可达到几到几十mV/°/s。
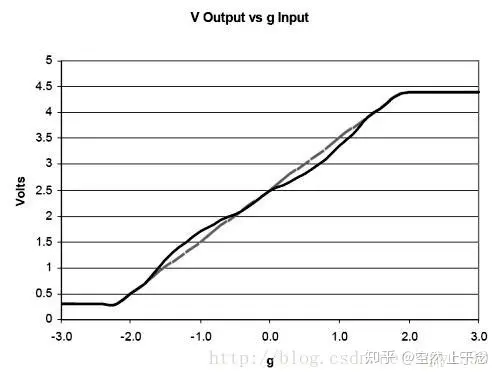
5. 比例因子误差
…详情请参照古月居
相关文章:
IMU/捷联惯导常见的术语,以及性能评价标准(附Python解析代码)
0. 简介 现在的机器人领域在普遍使用IMU(惯性导航单元)。该系统有三个加速度传感器与三个角速度传感器(陀螺)组成,加速度计用来感受飞机相对于地垂线的加速度分量,陀螺仪用来感知飞机的角速率变化…...

Debezium发布历史98
原文地址: https://debezium.io/blog/2020/11/12/debezium-1-3-1-final-released/ 欢迎关注留言,我是收集整理小能手,工具翻译,仅供参考,笔芯笔芯. Debezium 1.3.1.Final 发布 十一月 12, 2020 作者: 克里…...

APUE学习之进程间通信(IPC)(下篇)
目录 一、进程间通信(IPC) 二、信号量(Semaphore) 1、基本概念 2、同步关系与互斥关系 3、临界区与临界资源 4、信号量的工作原理 5、信号量编程 6、实战演练 三、共享内存(Shared Memory) 1、…...

【Java 设计模式】行为型之中介者模式
文章目录 1. 定义2. 应用场景3. 代码实现结语 中介者模式(Mediator Pattern)是一种行为型设计模式,用于通过一个中介对象来集中管理多个对象之间的交互关系,从而降低对象之间的耦合度。中介者模式通过将对象之间的通信委托给中介者…...
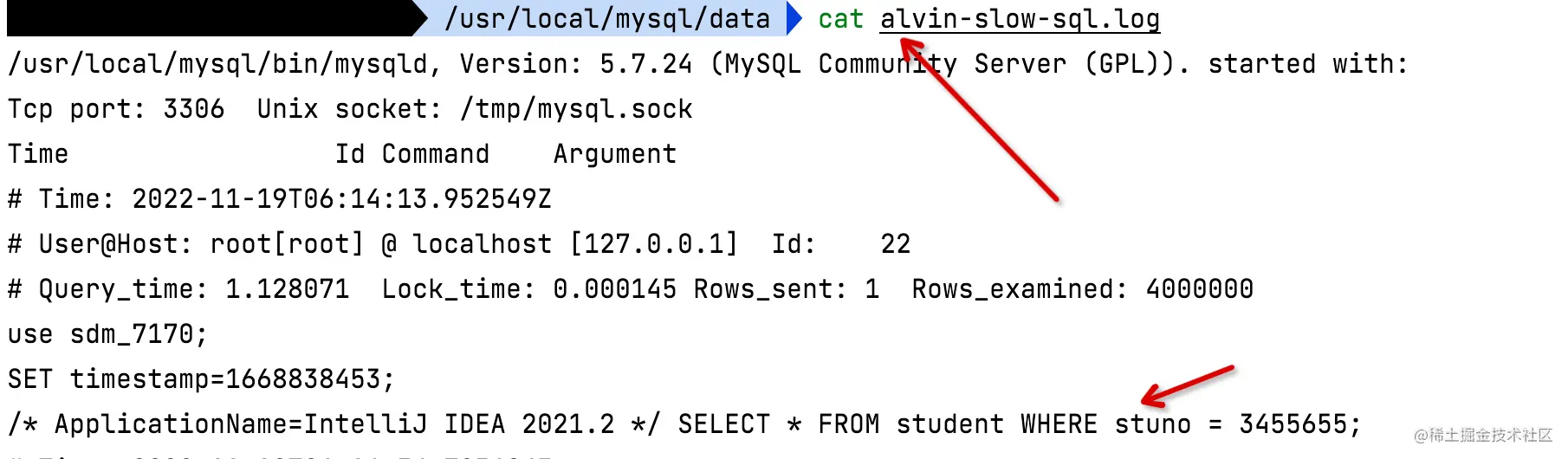
MySql 慢SQL配置,查询,处理
一.慢SQL配置相关 1.查看慢SQL是否开启 执行下面命令查看是否开启慢SQL show variables like %slow_query_log; 复制代码 OFF: 未开启ON: 2.打开慢SQL配置 执行下面的命令开启慢查询日志 set global slow_query_logON; 复制代码 3.修改慢查询阈值 前面介绍了SQL执行到达了…...

算法:分界线
一、算法描述 电视剧《分界线》里面有一个片段,男主为了向警察透露案件细节,且不暴露自己,于是将报刊上的字 剪切下来,剪拼成匿名信。 现在有一名举报人,希望借鉴这种手段,使用英文报刊完成举报操作。 但为…...

STM32单片机基本原理与应用(四)
直流电机驱动控制原理 1、电机正反转控制 在STM32中,直流电机的正反转控制主要通过改变电机输入电源的极性来实现。当电机的电压极性发生变化时,电机的旋转方向也会相应改变。在硬件电路中,可以通过继电器或晶体管等电子开关来切换电机的电源…...
elk之安装和简单配置
写在前面 本文看下elk的安装和简单配置,安装我们会尝试通过不同的方式来完成,也会介绍如何使用docker,docker-compose安装。 1:安装es 1.1:安装单实例 下载es安装包 在这里 下载,下载后解压到某个目录…...

springboot(ssm环保网站 绿色环保宣传系统Java系统
springboot(ssm环保网站 绿色环保宣传系统Java系统 开发语言:Java 框架:springboot(可改ssm) vue JDK版本:JDK1.8(或11) 服务器:tomcat 数据库:mysql 5.7࿰…...
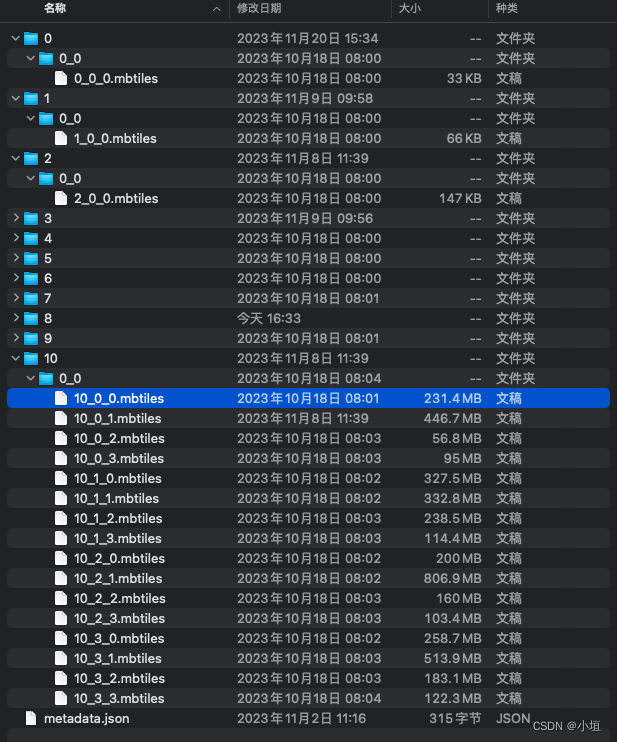
【MBtiles数据索引和服务发布】GeoServer改造Springboot番外系列二
xyz地图服务访问示例:http://192.168.1.240:8081/gmserver/raster/xyz/firstWP:Imagery-raster/{z}/{x}/{y}.jpg 访问示例如下: mbtiles目录结构 根据z,x,y获取对应mbtiles文件路径的工具方法 说明:重点是使用getMb…...

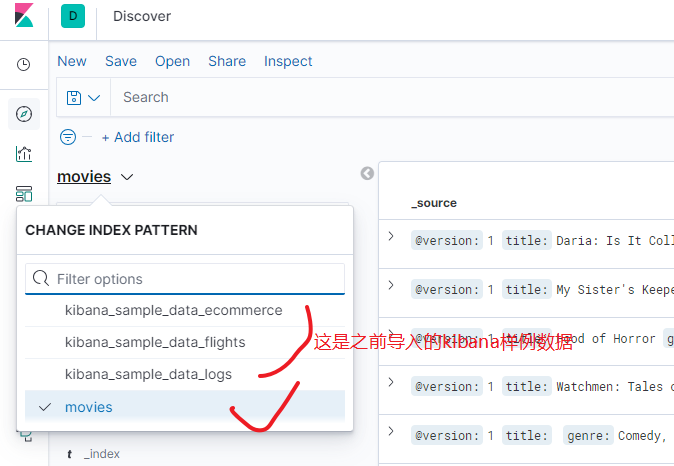
Redis抓取数据到Logstash再推到Elasticsearch集群
一、安装Logstash 前面安装过Logstash了,不做解释直接跳过 参考:上一篇文章 二、配置Logstash 在logstash目录下,编辑我们之前的配置文件logstash.conf vim logstash.confinput、output字面意思,从redis去拿取数据,输出到Elasticsearch data_type:数据类型为list k…...

【代码随想录-链表】反转链表
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学习,不断总结,共同进步,活到老学到老导航 檀越剑指大厂系列:全面总结 jav…...
32GPIO输入LED闪烁蜂鸣器
一.GPIO简介 所有的GPIO都挂载到APB2上,每个GPIO有16个引脚 内核可以通过APB2对寄存器进行读写,寄存器都是32位的,但每个引脚端口只有16位 驱动器用于增加信号的驱动能力 二.具体…...

Qt|QPushButton控件讲解
前提 按钮分为了四种状态:常态、聚焦、按下、禁用 前一段时间更新了MFC框架下CButton的自绘。因为MFC框架下的按钮限制性很高,所以只能由自绘实现各种风格,但是QT框架完美的解决了这个问题,我们只需要了解如何调用,就…...

再学webpack
1 优化 webpack 打包体积的思路 优化 webpack 打包体积的思路包括: 提取第三方库或通过引用外部文件的方式引入第三方库:将第三方库单独打包,并通过 CDN 引入,减少打包体积。使用代码压缩插件:例如 UglifyJsPlugin&a…...

systemd:service与target使用及相关命令
文章目录 一、 unit1.1 unit常用命令 二、 service系统服务2.1 unit service配置文件2.1.1 [Unit]区块2.1.2 [Service]区块2.1.3 [Install]区块2.1.4 示例介绍 2.2 service常用命令 三、target3.1 tartget有关命令 四、其他系统命令4.1 systemctl 相关系统管理命令4.2 journalc…...

FairGuard游戏加固入选《CCSIP 2023中国网络安全行业全景册(第六版)》
2024年1月24日, FreeBuf咨询正式发布《CCSIP 2023中国网络安全行业全景册(第六版)》。本次发布的全景图,共计展示20个一级分类、108个细分安全领域,旨在为广大企业提供网络安全产品选型参考,帮助企业了解中国网络安全技术与市场的…...

文心一言 VS ChatGPT :谁是更好的选择?
前言 目前各种大模型、人工智能相关内容覆盖了朋友圈已经各种媒体平台,对于Ai目前来看只能说各有千秋。GPT的算法迭代是最先进的,但是它毕竟属于国外产品,有着网络限制、注册限制、会员费高昂等弊端,难以让国内用户享受。文心一言…...

七街八巷×实在RPA丨财务凭证录入零出错,效率提升8倍
在如今的数字化时代,企业财务面临着海量且复杂的数据流程。特别是在凭证录入这一看似简单却又频繁的环节中,传统的手工操作已无法满足日益增长的业务需求。 中国轻食知名品牌七街八巷,通过部署实在智能集“自动化平台开箱即用解决方案咨询”…...
线性代数----------学习记录
线性代数发展历程 (1)线性方程组:例如二元一次方程组; (2)行列式:determinant,克莱默,莱布尼兹; (3)矩阵:方程个数与未知数的个数可…...

雷电9模拟器上Frida失效?Lamda绕过方案详解
1. 为什么雷电9 Frida 的组合让人又爱又恨在安卓逆向、协议分析和安全测试一线干了十多年,我经手过不下两百个App的动态调试项目。其中大麦App这类票务平台,因为其频繁的签名校验、设备指纹绑定和JSBridge加固,几乎成了Frida初学者的“劝退第…...

Qt/C++源码/监控GB28181组件/实时视频/云台控制/预置位/录像回放和下载/事件订阅/语音对讲/推流分发
一、功能特点 支持设备注册、注销、心跳、校时、注册认证、注销认证等。设备上线后可以手动获取设备状态、设备信息、配置信息、预置位信息等。设备上线后自动获取设备通道信息,包括中文通道名称。识别到通道上线离线变化,会重新获取该设备的所有通道信…...

STM32中断优先级到底怎么分?用医生叫号系统讲透NVIC抢占与响应优先级
STM32中断优先级到底怎么分?用医生叫号系统讲透NVIC抢占与响应优先级 在嵌入式系统开发中,实时响应能力往往是衡量系统性能的关键指标。想象一下,当您正在全神贯注地编写代码时,突然手机来电、微信消息和邮件通知同时响起——您会…...
降低 Agent 推理成本?)
成本优化秘籍:如何通过模型路由(Model Routing)降低 Agent 推理成本?
成本优化秘籍:如何通过模型路由(Model Routing)降低 Agent 推理成本? 1. 引入与连接:推理成本的"隐形黑洞"与破解之道 1.1 引人入胜的开场:一个真实的成本困境 让我们从一个真实故事开始。今年早些时候,我与一家知名科技创业公司的CTO进行了一次深入交流。…...

展锐RM500U 5G CPE固件升级避坑指南:为什么你的QFlash总卡在‘开始下载’?
展锐RM500U 5G CPE固件升级疑难解析:从QFlash卡顿到完美升级的实战手册 当你的展锐RM500U 5G CPE设备需要固件升级时,QFlash工具本应是简单高效的解决方案。然而,许多用户在点击"Start"按钮后,却遭遇了进度条停滞不前的…...

扫地机器人行业 企业篇-科沃斯
科沃斯成立于1998年,早期为海外品牌代工吸尘器,2009年发布全球首款量产扫地机器人"地宝",正式拉开中国扫地机市场序幕。公司为A股上市公司,总部位于苏州,公司性质为民营企业。 2025年全年营收达190亿元&…...

Burp Suite Professional实战卡点解析:HTTPS抓包、代理拦截与Intruder失效根因
1. 这不是“点开就能用”的工具,而是Web安全工程师的呼吸节奏很多人第一次打开Burp Suite Professional,盯着那个灰色的拦截开关发呆——明明浏览器配置了代理,HTTPS网站也装了CA证书,可流量就是不进Intruder、Repeater里不动如山…...

信创环境运维实录:在离线ARM麒麟V10服务器上,我是这样搞定telnet客户端的
信创环境下的离线运维实战:ARM架构麒麟V10服务器telnet客户端部署全解析在信创产业快速推进的背景下,越来越多的企业和机构开始采用国产化服务器操作系统。麒麟V10作为国产操作系统的代表之一,凭借其安全可靠的特性,在政府、金融、…...

StPageFlip:打造专业级Web翻页效果的终极指南
StPageFlip:打造专业级Web翻页效果的终极指南 【免费下载链接】StPageFlip Simple library for creating realistic page turning effects 项目地址: https://gitcode.com/gh_mirrors/st/StPageFlip 在数字内容呈现日益重要的今天,如何让网页内容…...
)
Unity异步编程新选择:用R3和NuGetForUnity搞定响应式事件流(附AOT兼容性测试)
Unity异步编程新选择:R3与NuGetForUnity的深度实践指南引言:为什么我们需要更好的事件处理方案?在Unity开发中,事件驱动编程早已成为构建复杂交互系统的核心范式。从传统的UnityEvent到协程(Coroutine),再到曾经风靡一…...