Day39 62不同路径 63不同路径II 343整数拆分 96不同的二叉搜索树
62 不同路径
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
问总共有多少条不同的路径?
示例 1:
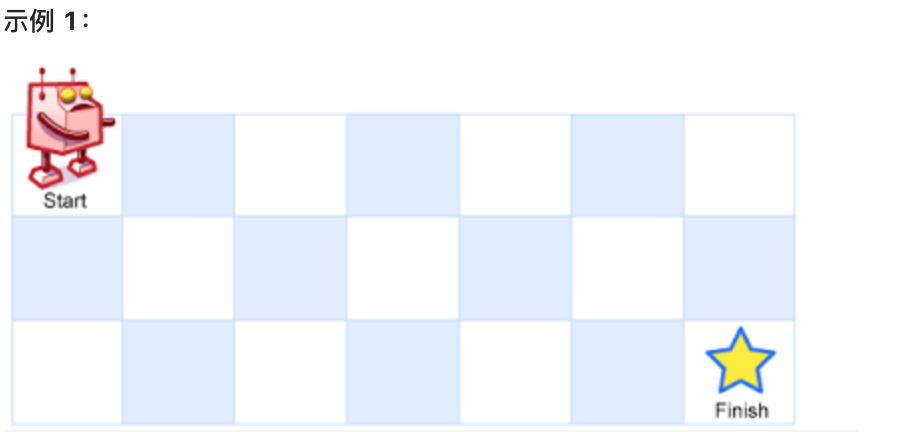
- 输入:m = 3, n = 7
- 输出:28
示例 2:
- 输入:m = 2, n = 3
- 输出:3
解释: 从左上角开始,总共有 3 条路径可以到达右下角。
- 向右 -> 向右 -> 向下
- 向右 -> 向下 -> 向右
- 向下 -> 向右 -> 向右
本题用动态规划五部曲进行分析:首先dp数组的含义是到达这个点有多少种走法,这里题目已经给了按时,递推方程为左边的走法加上面的走法,即dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; 初始条件为左边界和上边界都初始为1,选择两个边界是因为只有通过这样才能让后面的dp数组有值,选择1是因为每次走到那里都是一种走法;遍历顺序为从前往后依次遍历,最后打印dp数组:
class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>> dp(m, vector<int>(n, 0));for (int i = 0; i < m; i++) dp[i][0] = 1;for (int j = 0; j < n; j++) dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m - 1][n - 1];}
};63 不同路径II
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
本题相比于上一题,主要就是添加了障碍,如果障碍在起始或者终止位置,直接返回0即可,如果在左边界和上边界,障碍和后面的所有dp都设为0即可,在网格中,一旦遇到了障碍,就跳过他:
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {int m = obstacleGrid.size();int n = obstacleGrid[0].size();if (obstacleGrid[m - 1][n - 1] == 1 || obstacleGrid[0][0] == 1) //如果在起点或终点出现了障碍,直接返回0return 0;vector<vector<int>> dp(m, vector<int>(n, 0));for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) dp[0][j] = 1;for (int i = 1; i < m; i++) {for (int j = 1; j < n; j++) {if (obstacleGrid[i][j] == 1) continue;dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}return dp[m - 1][n - 1];}
};343 整数拆分
给定一个正整数 n,将其拆分为至少两个正整数的和,并使这些整数的乘积最大化。 返回你可以获得的最大乘积。
递归五部曲:首先dp数组表示的就是最大乘积,递推公式为dp[i]=max(dp[i], max((i-j)*j,dp[i-j]*j));
初始条件只能从2开始取,拆分以后最大乘积为1,遍历顺序从前到后:
class Solution {
public:int integerBreak(int n) {vector<int> dp(n + 1);dp[2] = 1;for (int i = 3; i <= n ; i++) {for (int j = 1; j <= i / 2; j++) {dp[i] = max(dp[i], max((i - j) * j, dp[i - j] * j));}}return dp[n];}
};96 不同的二叉搜索树
给定一个整数 n,求以 1 ... n 为节点组成的二叉搜索树有多少种?

本题经过测试发现,后面的搜索树的数量和前面的搜索树的数量是有关系的,因为这是一个二叉搜索树,
在上面的分析中,其实已经看出其递推关系, dp[i] += dp[以j为头结点左子树节点数量] * dp[以j为头结点右子树节点数量]
j相当于是头结点的元素,从1遍历到i为止。
所以递推公式:dp[i] += dp[j - 1] * dp[i - j]; ,j-1 为j为头结点左子树节点数量,i-j 为以j为头结点右子树节点数量
class Solution {
public:int numTrees(int n) {vector<int> dp(n + 1);dp[0] = 1;for (int i = 1; i <= n; i++) {for (int j = 1; j <= i; j++) {dp[i] += dp[j - 1] * dp[i - j];}}return dp[n];}
};
相关文章:
Day39 62不同路径 63不同路径II 343整数拆分 96不同的二叉搜索树
62 不同路径 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。 问总共有多少条不同的路径&#…...
JavaScript 的 ~~ 运算和floor 的性能差异
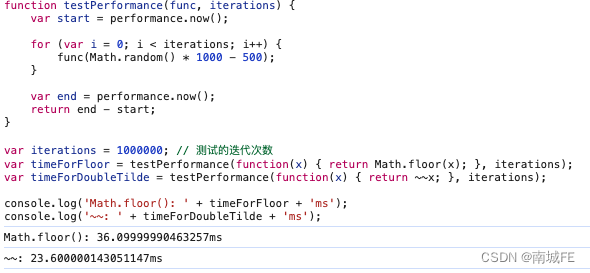
在JavaScript中,~~(双波浪号)和Math.floor()都可以用于向下取整,但它们在行为和性能上有一些差异。要测试这两者之间的性能差异,你可以使用JavaScript的performance.now()方法来进行基准测试。 行为差异 Math.floor()…...
AtCoder Beginner Contest 338F - Negative Traveling Salesman【floyd+状态压缩dp】
原题链接:https://atcoder.jp/contests/abc338/tasks/abc338_f Time Limit: 6 sec / Memory Limit: 1024 MB Score: 500 points、 问题陈述 有一个有N个顶点和M条边的加权简单有向图。顶点的编号为 1 到 N,i/th 边的权重为 Wi,从顶点 U…...
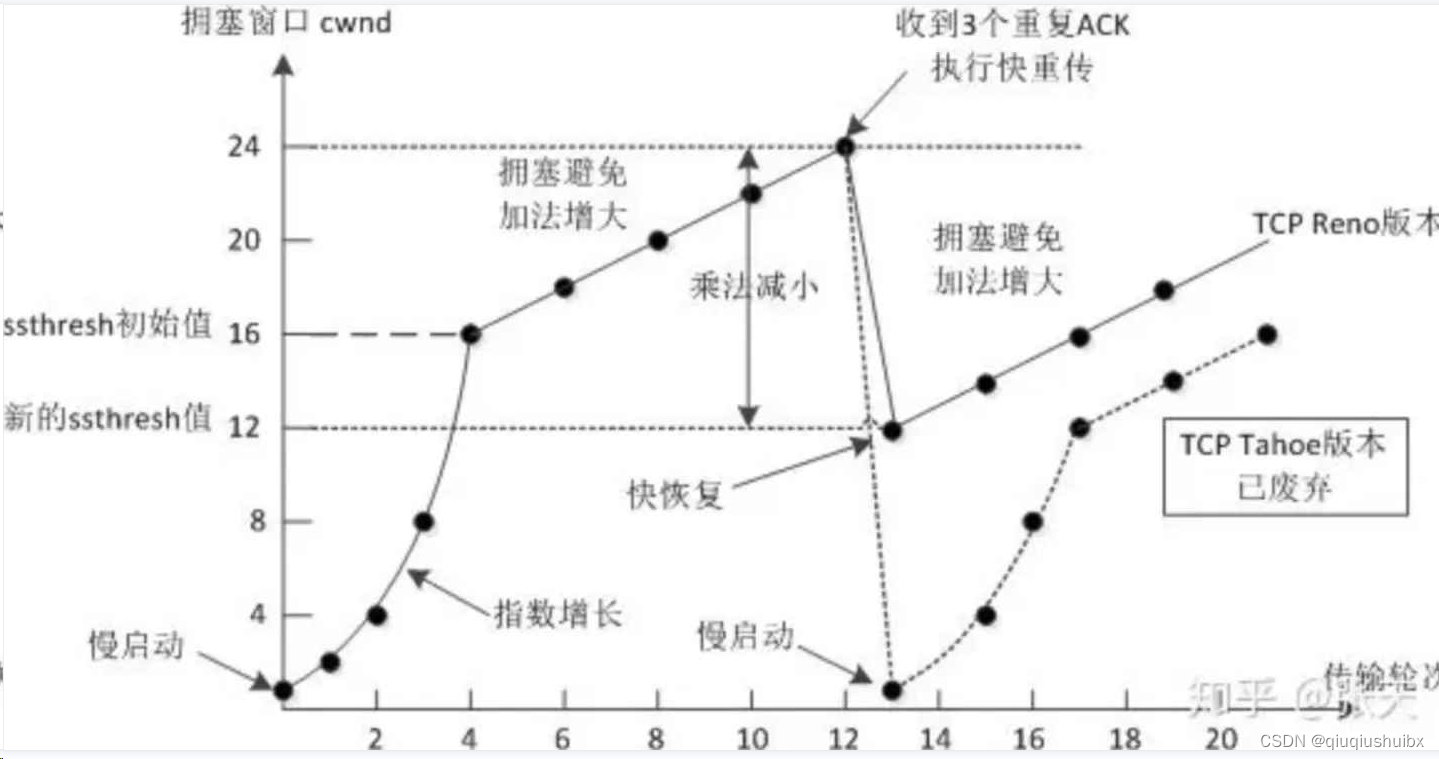
UDP/TCP协议特点
1.前置知识 定义应用层协议 1.确定客户端和服务端要传递哪些信息 2.约定传输格式 网络上传输的一般是二进制数据/字符串 结构化数据转二进制/字符串 称为序列化 反之称之为反序列化 下面就是传输层了 在TCP/IP协议中,我们以 目的端口,目的IP 源端口 源IP 协议号这样一个五…...

编程笔记 html5cssjs 059 css多列
编程笔记 html5&css&js 059 css多列 一、CSS3 多列属性二、实例小结 CSS3 可以将文本内容设计成像报纸一样的多列布局. 一、CSS3 多列属性 下表列出了所有 CSS3 的多列属性: 属性 描述 column-count 指定元素应该被分割的列数。 column-fill 指定如何填充…...

Facebook的元宇宙探索:虚拟社交的新时代
近年来,科技的飞速发展推动着人类社交方式的翻天覆地的改变。在这场数字化革命的浪潮中,社交媒体巨头Facebook正积极探索并引领着一个被誉为“元宇宙”的全新领域,试图为用户打造更为真实、丰富的虚拟社交体验。 元宇宙的崛起 元宇宙这个概念…...

用React给XXL-JOB开发一个新皮肤(四):实现用户管理模块
目录 一. 简述二. 模块规划 2.1. 页面规划2.2. 模型实体定义 三. 模块实现 3.1. 用户分页搜索3.2. Modal 配置3.3. 创建用户表单3.4. 修改用户表单3.5. 删除 四. 结束语 一. 简述 上一篇文章我们实现登录页面和管理页面的 Layout 骨架,并对接登录和登出接口。这篇…...

某赛通电子文档安全管理系统 hiddenWatermark/uploadFile 文件上传漏洞复现
0x01 产品简介 某赛通电子文档安全管理系统(简称:CDG)是一款电子文档安全加密软件,该系统利用驱动层透明加密技术,通过对电子文档的加密保护,防止内部员工泄密和外部人员非法窃取企业核心重要数据资产,对电子文档进行全生命周期防护,系统具有透明加密、主动加密、智能…...

Redis五种数据类型及应用场景
1、数据类型 String(字符串,整数,浮点数):做简单的键值对缓存 List(列表):储存一些列表类型的数据结构 Hash(哈希):包含键值对的无序散列表,结构化的数据 Set(无序集合):交集,并集…...
测试环境搭建整套大数据系统(一:基础配置,修改hostname,hosts,免密)
一:使用服务器配置。 二:修改服务器名称hostname,hosts。 在 Linux 系统中,hostname 和 /etc/hosts 文件分别用于管理主机名和主机名解析。 在三台服务器上,分别执行以下命令。 vim /etc/hostnamexdso-hadoop-test-0…...
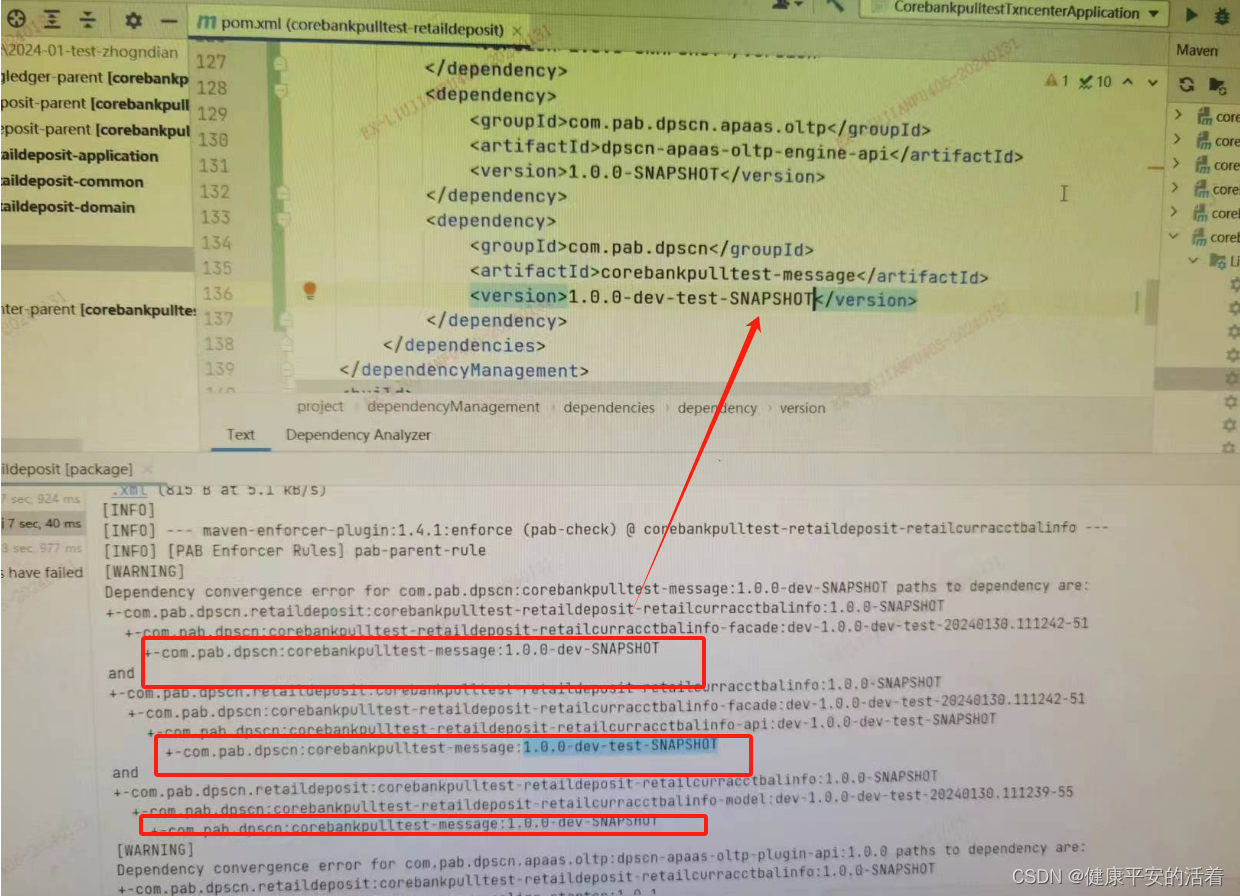
maven helper 解决jar包冲突方法
一 概要说明 1.1 说明 首先,解决idea中jar包冲突,使用maven的插件:maven helper插件,它能够给我们罗列出来同一个jar包的不同版本,以及他们的来源,但是对不同jar包中同名的类没有办法。 1.2 依赖顺序 …...
)
AppSrv-文件共享(23国赛真题)
2023全国职业院校技能大赛网络系统管理赛项–模块B:服务部署(WindowServer2022) 文章目录 AppSrv-文件共享题目配置步骤创建用户主目录共享文件夹:本地目录为d:\share\users\,允许所有域用户可读可写。在本目录下为所有用户添加一个以名称命名的文件夹,该文件夹将设置为所…...

AsyncLocal是如何实现在Thread直接传值的?
一:背景 1. 讲故事 这个问题的由来是在.NET高级调试训练营第十期分享ThreadStatic底层玩法的时候,有朋友提出了AsyncLocal是如何实现的,虽然做了口头上的表述,但总还是会不具体,所以觉得有必要用文字图表的方式来系统…...
Flask 入门1:一个简单的 Web 程序
1. 关于 Flask Flask诞生于2010年, Armin Ronacher的一个愚人节玩笑。不过现在已经是一个用python语言基于Werkzeug工具箱编写的轻量级web开发框架,它主要面向需求简单,项目周期短的小应用。 Flask本身相当于一个内核,其他几乎所…...
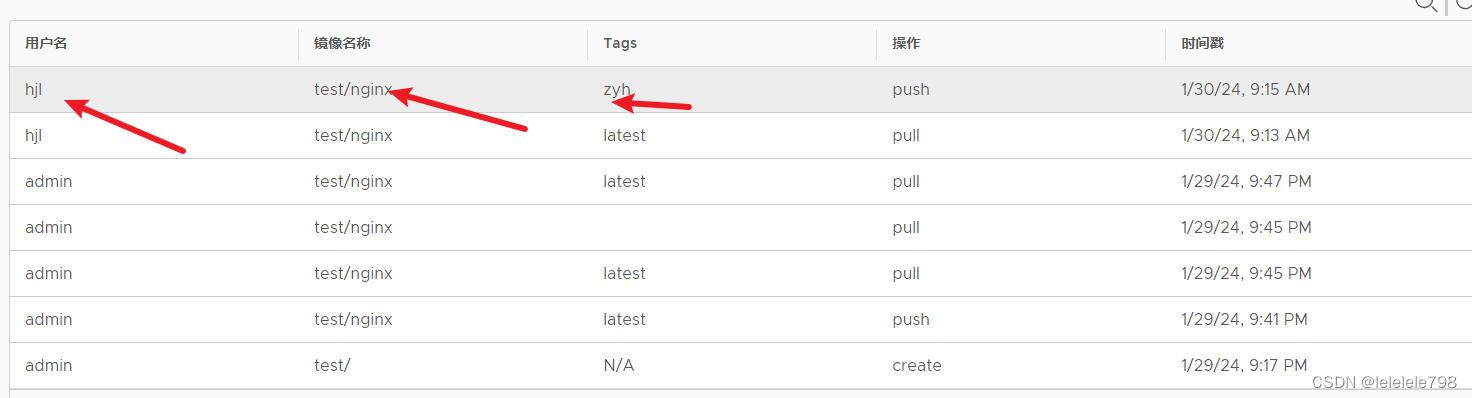
维护管理Harbor,docker容器的重启策略
维护管理Harbor 通过HarborWeb创建项目 在 Harbor 仓库中,任何镜像在被 push 到 regsitry 之前都必须有一个自己所属的项目。 单击“项目”,填写项目名称,项目级别若设置为"私有",则不勾选。如果设置为公共仓库&#…...
Qt6入门教程 14:QToolButton
目录 一.简介 二.常用接口 1.void setMenu(QMenu * menu) 2.void setPopupMode(ToolButtonPopupMode mode) 3.void setToolButtonStyle(Qt::ToolButtonStyle style) 4.void setArrowType(Qt::ArrowType type) 5.void setDefaultAction(QAction * action) 三.实战演练 1…...
3D数据转换器HOOPS Exchange如何获取模型的几何数据? 干货预警!
一、概述 前面讲解过模型在内存中的结构,现在回顾一下,当模型导入成功后,整个模型数据会以原生结构的 PRC 组装树形式存放到内存中。(申请 HOOPS Exchange 试用) PRC结构的主要类型包含四种,分别是…...

Coremail启动鸿蒙原生应用开发,打造全场景邮件办公新体验
1月18日,华为在深圳举行鸿蒙生态千帆启航仪式,Coremail出席仪式并与华为签署鸿蒙合作协议,宣布正式启动鸿蒙原生应用开发。作为首批拥抱鸿蒙的邮件领域伙伴,Coremail的加入标志着鸿蒙生态版图进一步完善。 Coremail是国内自建邮件…...

基于CVITEK_CV1821+SOI_Q03P的IPC方案
方案概述: 该方案基于主控平台CVITEK_CV1821和sensor SOI_Q03P,运用于智能监控IP摄像头,可用于户外或室内。采用了2304x1296的分辨率,30的帧率,支持HDR。作为3M的监控摄像头,通过ISP图像调校技术ÿ…...

chromedriver安装和环境变量配置
chromedriver 1、安装2、【重点】环境变量配置(1)包的复制:(2)系统环境变量配置 3、验证 1、安装 网上随便搜一篇chromedriver的安装文档即可。这里是一个快速链接 特别提醒:截止2024.1.30,chr…...

AI赋能引力波数据分析:WCD深度学习框架从噪声中探测暗物质信号
1. 项目概述:当引力波遇见AI,如何从噪声中“看见”暗物质?在引力波天文学这个前沿领域,我们正面临一个激动人心又充满挑战的时代。自从LIGO首次直接探测到引力波以来,我们不仅“听”到了黑洞并合的宇宙巨响,…...

量子核方法在工业音频异常检测中的实践与性能突破
1. 项目概述:当量子计算遇见工厂“听诊器” 在工厂车间里,设备运转的轰鸣声对经验丰富的老师傅而言,就像一首熟悉的交响乐。哪个齿轮的啮合声变“涩”了,哪台电机的运转声带上了不该有的“颤音”,他们往往能第一时间察…...

[Python] Python中自带模块级的单例模式-不需要定义单例类
Python中的单例场景 一般一些需要在模块中全局维护的变量(变量修改范围在模块内);简单方式是构建一个全局变量,然后不符合编码规范:1.线程安全与并发问题;2.测试隔离困难;3.缺乏多实例/多租户支…...

安全稀疏矩阵乘法:基于二叉树递归传播的MPC算法优化详解
1. 项目概述:当稀疏矩阵乘法遇上安全多方计算 在分布式机器学习、联合数据分析以及隐私保护推荐系统的构建中,我们常常面临一个核心矛盾:数据的所有权分散在多个互不信任的参与方手中,大家希望共同训练一个模型或进行一次计算&…...

2026年照片去水印免费软件保姆级教程!学会这几招,告别水印烦恼
你是不是也遇到过这样的抓狂时刻?在平台上刷到一张特别适合做壁纸或配图的高清照片,兴冲冲地保存下来,结果角落里的水印瞬间让整张图的格调打了对折;又或者,自己辛辛苦苦做好的图片,在分享转发几道后&#…...

C#模拟DirectInput鼠标玩FBA街机:协议级输入桥接方案
1. 这不是游戏外挂,而是让老街机在现代系统上“活过来”的底层输入桥接你有没有试过把一台尘封十年的FBA模拟器翻出来,想重温《街头霸王2》搓招的快感,结果鼠标点来点去像在操作PPT——按住左键拖动是移动光标,松开才是“出拳”&a…...
)
手把手教你用Powergui的FFT Tool分析Simulink示波器数据(从记录到出图)
从仿真到频谱:Powergui FFT工具在Simulink中的完整应用指南当你在Simulink中完成电力系统或信号处理的仿真后,如何从时域波形中提取有价值的频域信息?许多工程师在第一次接触FFT分析时,往往会被各种参数设置和数据格式问题困扰。本…...

3D光学流技术在机器人动作生成中的应用与优化
1. 3D光学流技术解析与机器人动作生成3D光学流技术是计算机视觉领域的重要突破,它通过分析物体在三维空间中的连续运动轨迹,为机器人动作规划提供了前所未有的精确度。传统2D光学流仅能捕捉平面运动信息,而3D光学流则能完整重建物体在XYZ三个…...

美国RTP全系列抗静电塑料产品服务介绍
宏裕塑胶代理美国RTP全系列材料,专注于为制造业企业提供高性价比、稳定可控的工程塑料原料供应及全流程技术支持,凭借源头直采优势与专业服务能力,成为塑胶制品厂、汽车零部件厂及精密电子企业的可靠合作伙伴。宏裕塑胶代理美国RTP全系列材料…...

深度学习篇---NVIDIA DeepStream
NVIDIA DeepStream 是一个功能强大的流媒体分析工具包,专为基于 AI 的多传感器处理、视频、音频和图像理解而设计。你可以把它想象成一个“视觉 AI 应用的乐高工厂”,它把视频解码、AI 推理、目标追踪这些复杂的“零件”,巧妙地组合成一条高效…...