STM32CubeMX教程31 USB_DEVICE - HID外设_模拟键盘或鼠标
目录
1、准备材料
2、实验目标
3、模拟鼠标实验流程
3.0、前提知识
3.1、CubeMX相关配置
3.1.0、工程基本配置
3.1.1、时钟树配置
3.1.2、外设参数配置
3.1.3、外设中断配置
3.2、生成代码
3.2.0、配置Project Manager页面
3.2.1、设初始化调用流程
3.2.2、外设中断调用流程
3.2.3、添加其他必要代码
4、烧录验证
5、模拟键盘实验流程简述
5.0、前提知识
5.1、CubeMX相关配置
5.2、生成代码
5.3、烧录验证
6、常用函数
7、注释详解
参考资料
1、准备材料
正点原子stm32f407探索者开发板V2.4
STM32CubeMX软件(Version 6.10.0)
keil µVision5 IDE(MDK-Arm)
ST-LINK/V2驱动
野火DAP仿真器
XCOM V2.6串口助手
2、实验目标
使用STM32CubeMX软件配置STM32F407开发板USB_OTG_FS为工作在Human Interface Device Class (HID)(人机接口设备类)模式下的USB_DEVICE(USB从机),利用上下左右四个用户按键模拟在Windwos上的鼠标或键盘操作
3、模拟鼠标实验流程
3.0、前提知识
关于USB的相关知识请读者阅读STM32CubeMX教程29 USB_HOST - 使用FatFs文件系统读写U盘实验“3、USB概述”小节内容,USB_SALVE从机接口硬件原理图请读者阅读其“4.0、前提知识”小节内容
关于USB从机参数配置中Device Descriptor 选项卡下的参数配置请阅读STM32CubeMX教程30 USB_DEVICE - MSC外设_读卡器实验”3.0、前提知识“小节
将USB设备接口配置工作在Human Interface Device Class (HID)模式下,然后通过USB线连接到Windows电脑上就可以作为一个人体学输入设备出现在PC的设备管理器中,在此模式下可以将USB设备模拟为鼠标、键盘等其他的外设,默认情况下CubeMX生成的HID外设为鼠标
鼠标设备和计算机通过USB通信采用HID的鼠标协议,该协议由四个字节组成,用于向计算机报告当前鼠标的状态,四个字节代表的含义如下图所示
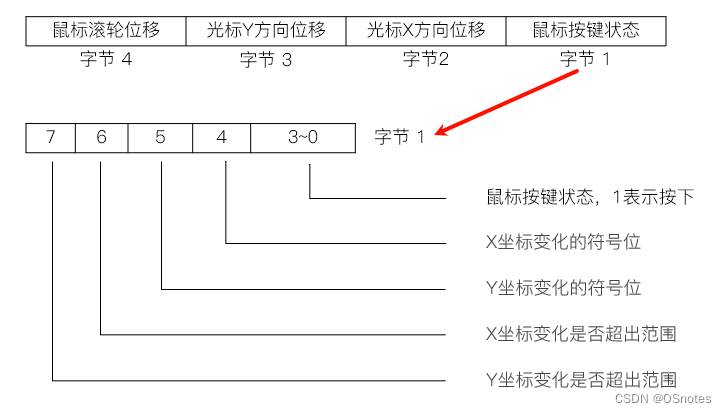
第一个字节共8位数据用于表示鼠标上的按键状态,每个位代表一个按钮,1表示按下,0表示未按下,最左边的Button位于字节的低位,通常下最低位表述鼠标左键,第一位表示鼠标右键,第二位表示鼠标中键,比如设置该字节数据为0x01,则表示鼠标左键被按下
第二个字节表示鼠标在水平(X)方向上的相对移动,比如设置该字节数据为10,则表示X正方向移动10刻度;第三个字节表示鼠标在竖直(Y)方向上的相对移动,比如设置该字节数据为-10,则表示Y负方向移动10刻度;第四个字节表示滚轮的状态,比如设置该字节数据为10表示向上滚动10刻度
3.1、CubeMX相关配置
3.1.0、工程基本配置
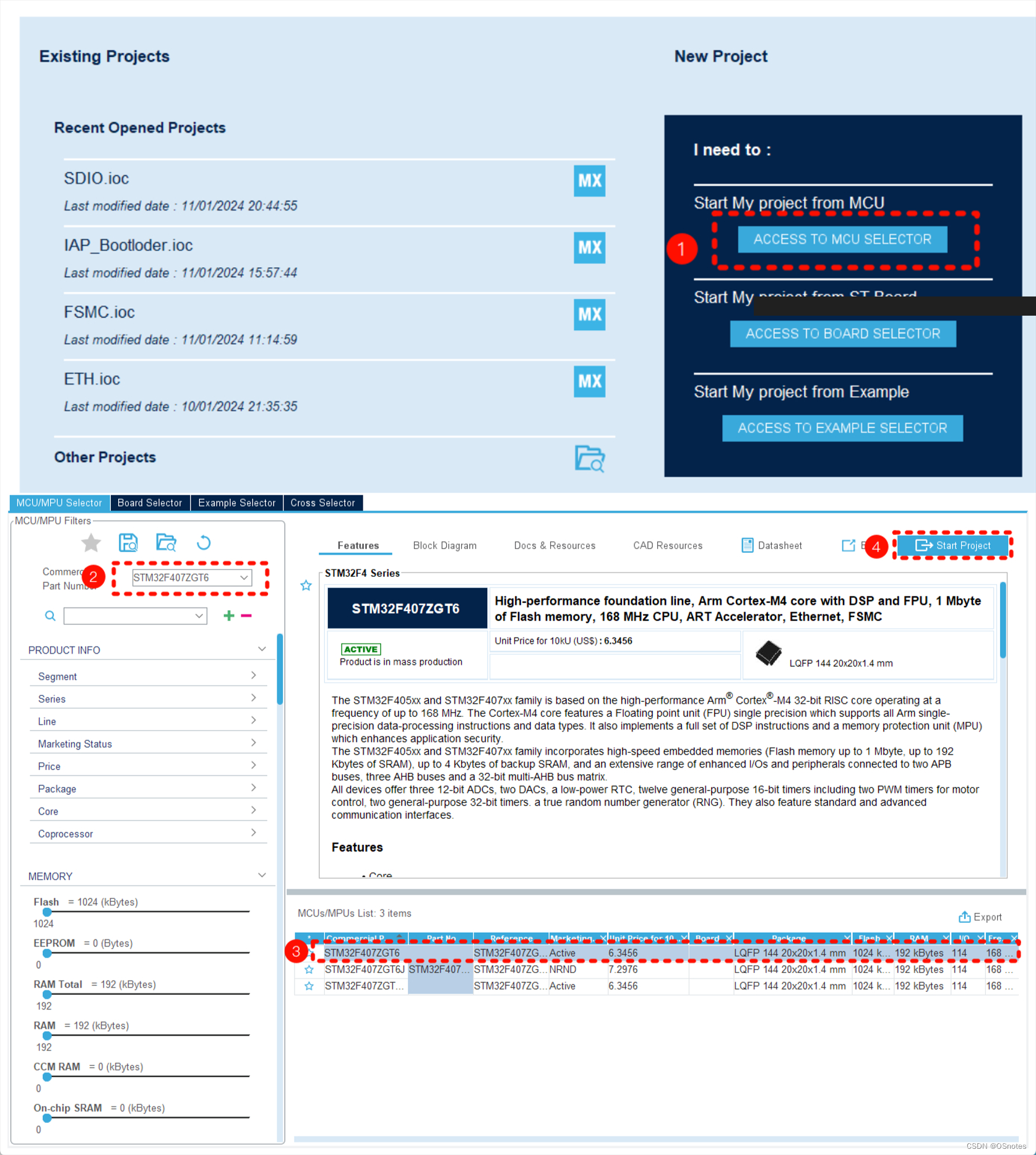
打开STM32CubeMX软件,单击ACCESS TO MCU SELECTOR选择开发板MCU(选择你使用开发板的主控MCU型号),选中MCU型号后单击页面右上角Start Project开始工程,具体如下图所示
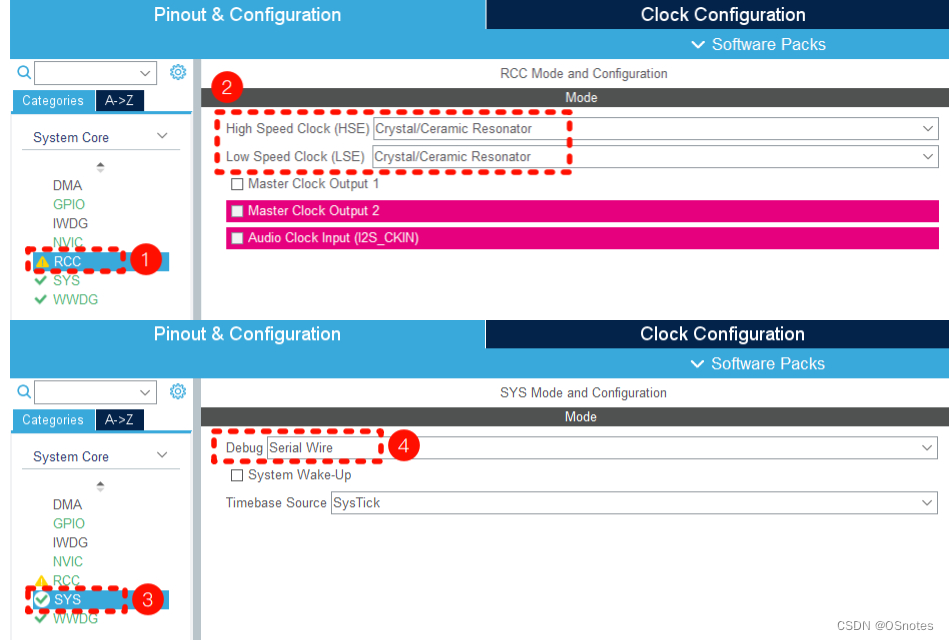
开始工程之后在配置主页面System Core/RCC中配置HSE/LSE晶振,在System Core/SYS中配置Debug模式,具体如下图所示
详细工程建立内容读者可以阅读“STM32CubeMX教程1 工程建立”
3.1.1、时钟树配置
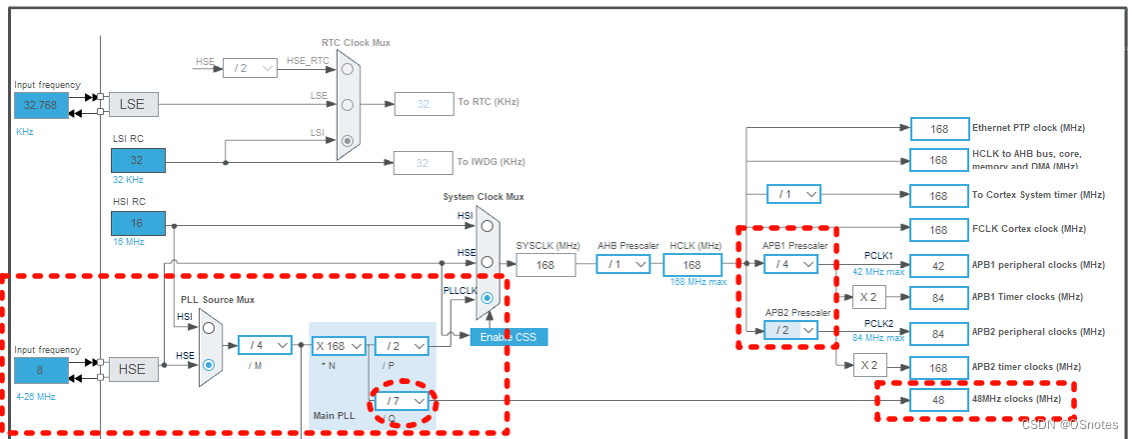
将时钟树中48MHz时钟配置为48MHz,也即将Main PLL(主锁相环)的Q参数调节为7,其他HCLK、PCLK1和PCLK2时钟仍然设置为STM32F407能达到的最高时钟频率,具体如下图所示
3.1.2、外设参数配置
本实验需要初始化开发板上WK_UP、KEY2、KEY1和KEY0用户按键,具体配置步骤请阅读“STM32CubeMX教程3 GPIO输入 - 按键响应”
本实验需要初始化TIM6外设实现1ms定时,具体配置步骤请阅读“STM32CubeMX教程5 TIM 定时器概述及基本定时器”
本实验需要初始化USART1作为输出信息渠道,具体配置步骤请阅读“STM32CubeMX教程9 USART/UART 异步通信”
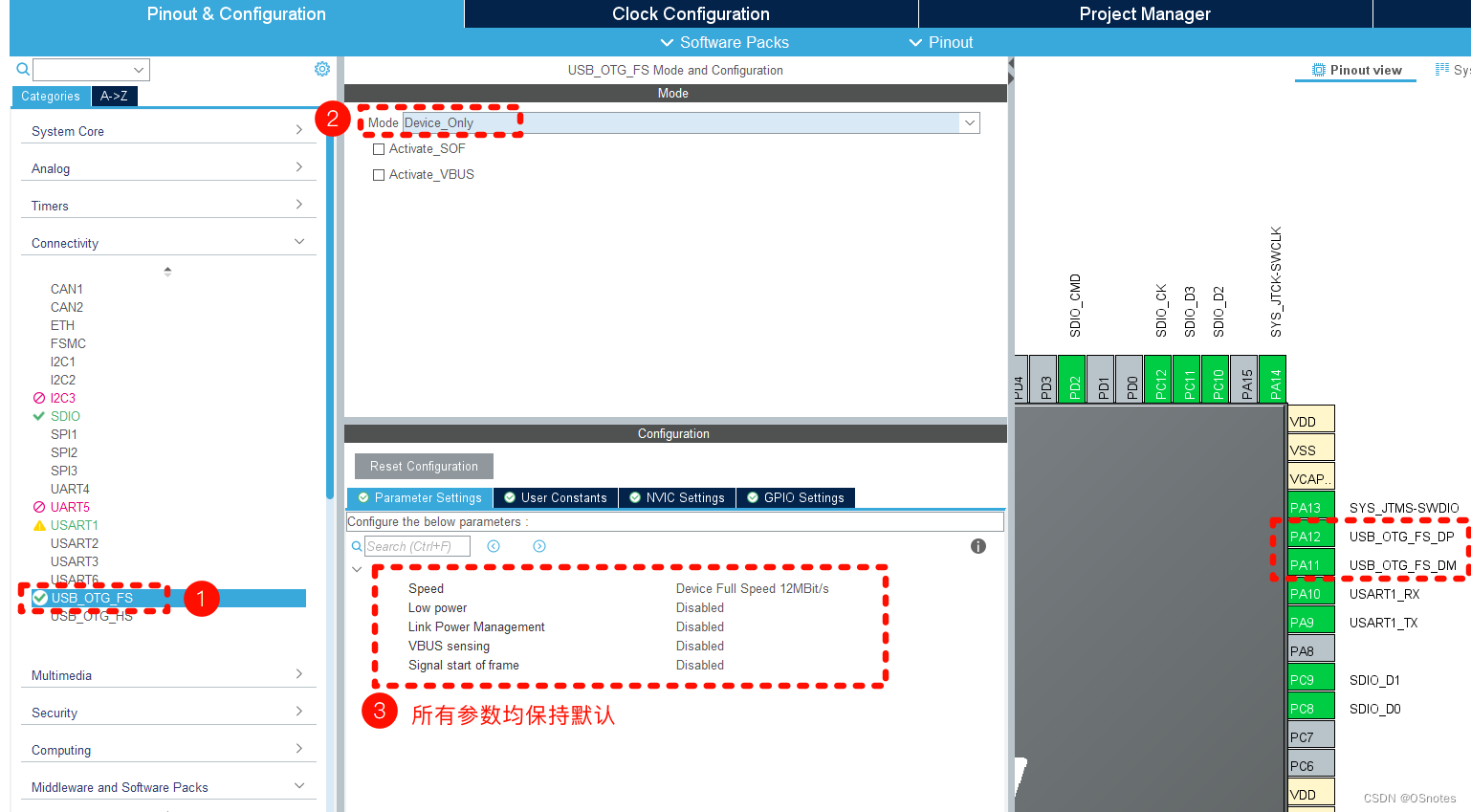
单击Pinout & Configuration页面左边功能分类栏目中Connectivity/USB_OTG_FS,将其模式配置为仅从机(Device_Only),其他所有参数保持默认即可,具体配置如下图所示
单击Pinout & Configuration页面左边功能分类栏目中Middleware and Software Packs/USB DEVICE,将其模式配置为Human Interface Device Class (HID)(人机接口设备类),其他所有参数保持默认即可,具体配置如下图所示
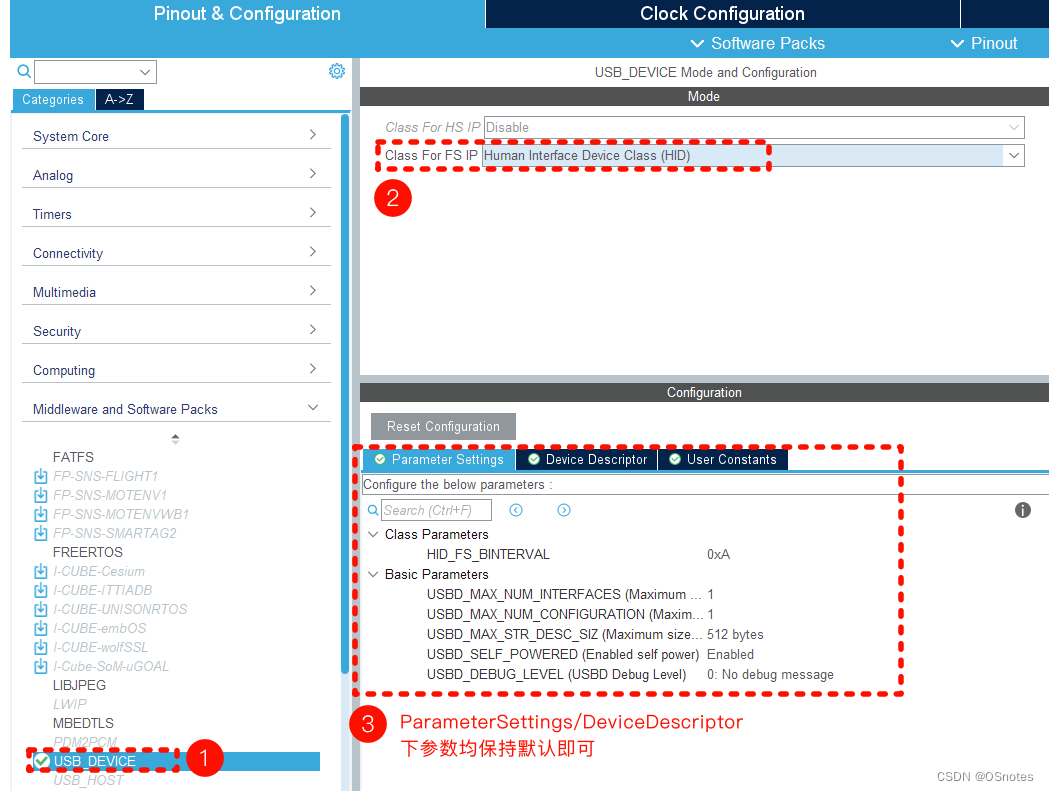
HID_FS_BINTERVAL (指定中断传输的轮询间隔):可选0x01 ~ 0xFF,以毫秒为单位,此处设置为0XA表示USB主机每10ms轮询一次USB设备获取新的信息
Parameter Settings和Device Descriptor选项卡下其余参数请阅读STM32CubeMX教程30 USB_DEVICE - MSC外设_读卡器实验”3.0、前提知识“和”3.1.2、外设参数配置“两个小节
3.1.3、外设中断配置
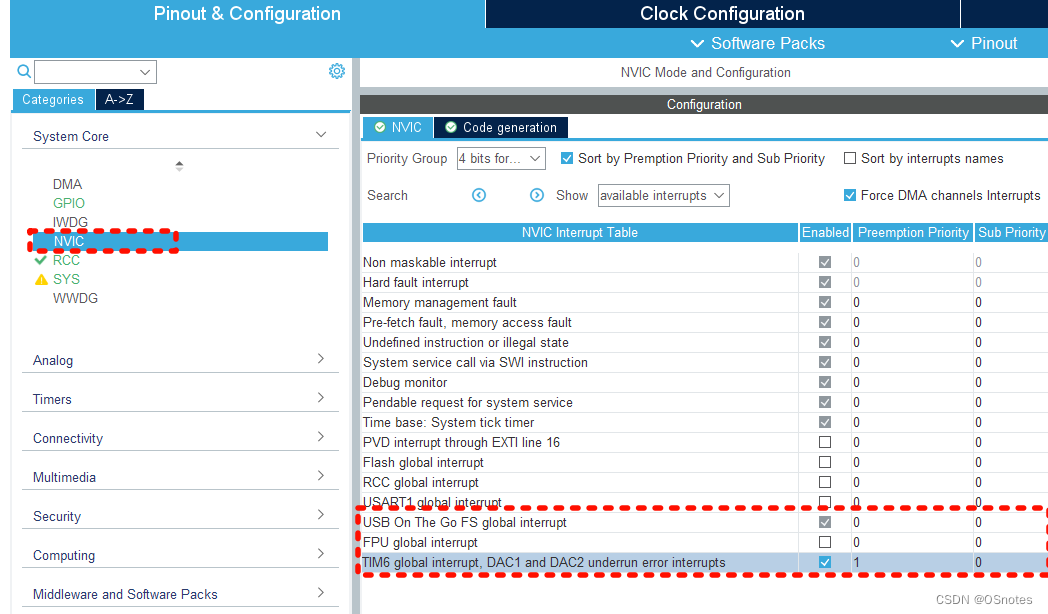
当在Middleware and SoftwarePacks中配置了USB_DEVICE的模式不为Disable时,便会自动开启USB_OTG的全局中断,且不可关闭,用户配置合适的中断优先级即可
注意本实验需要开启基本定时器TIM6的全局中断,勾选NVIC下的全局中断,具体配置如下图所示
3.2、生成代码
3.2.0、配置Project Manager页面
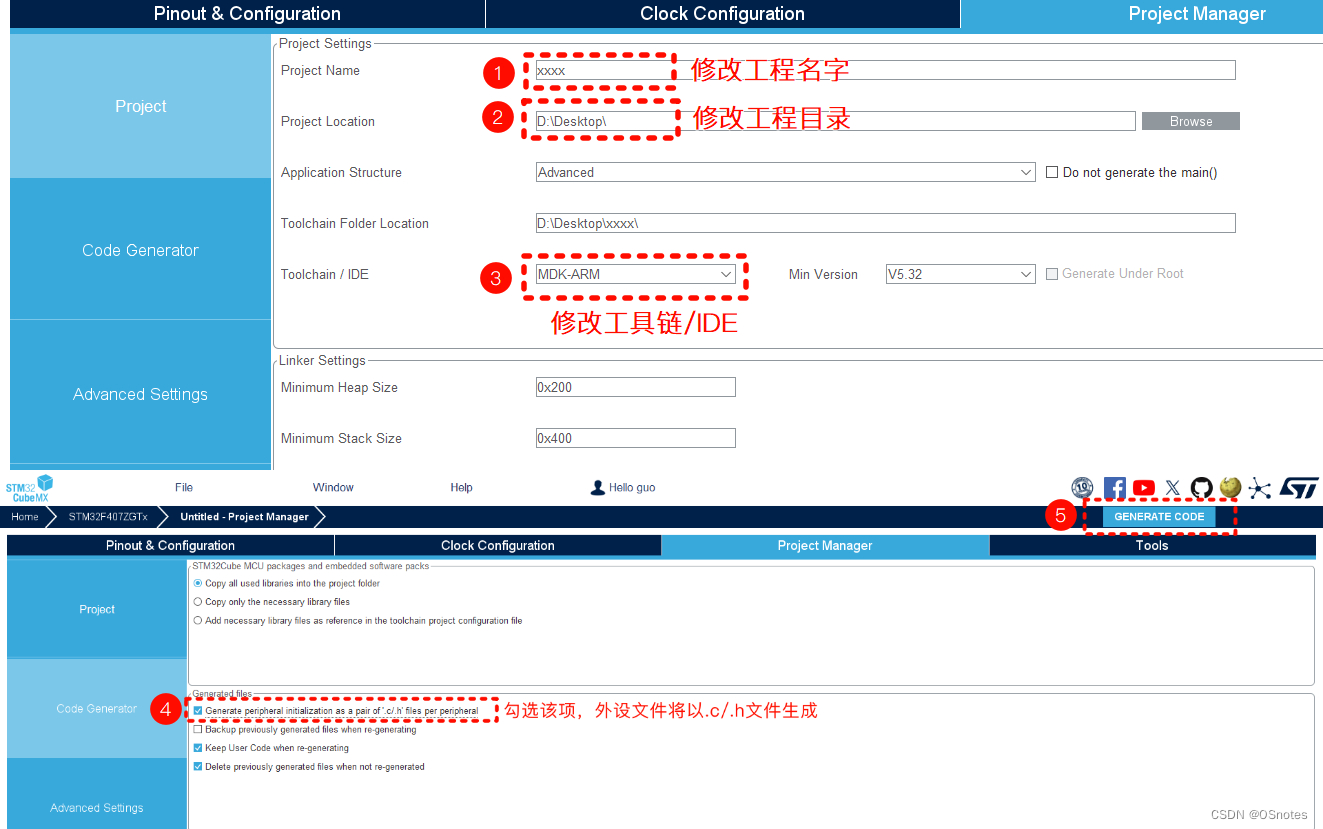
单击进入Project Manager页面,在左边Project分栏中修改工程名称、工程目录和工具链,然后在Code Generator中勾选“Gnerate peripheral initialization as a pair of 'c/h' files per peripheral”,最后单击页面右上角GENERATE CODE生成工程,具体如下图所示
详细Project Manager配置内容读者可以阅读“STM32CubeMX教程1 工程建立”实验3.4.3小节
3.2.1、设初始化调用流程
暂无
3.2.2、外设中断调用流程
暂无
3.2.3、添加其他必要代码
在main.c文件最下方添加通过按键设置鼠标指针坐标值的函数 和 TIM6定时器1ms回调函数,具体源代码如下所示
/*设置鼠标指针坐标值*/
static void GetPointerData(uint8_t *pbuf)
{int8_t x = 0, y = 0, button = 0, Wheel=0;/*按键WK_UP被按下*/if(HAL_GPIO_ReadPin(WK_UP_GPIO_Port,WK_UP_Pin) == GPIO_PIN_SET){if(HAL_GPIO_ReadPin(WK_UP_GPIO_Port,WK_UP_Pin) == GPIO_PIN_SET){printf("Scroll the wheel up\r\n");//y -= CURSOR_STEP;Wheel = 10;}}/*按键KEY2被按下*/if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin) == GPIO_PIN_RESET){printf("←←←\r\n");x -= CURSOR_STEP;}}/*按键KEY1被按下*/if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){printf("Left_Button_Pressed\r\n");//y += CURSOR_STEP;button = 0x01;}}/*按键KEY0被按下*/if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){printf("→→→\r\n");x += CURSOR_STEP;}}pbuf[0] = button;pbuf[1] = x;pbuf[2] = y;pbuf[3] = Wheel;
}/*TIM6定时器1ms回调函数*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{static __IO uint32_t counter = 0;/* check Joystick state every polling interval (10ms) */if(counter++ == USBD_HID_GetPollingInterval(&hUsbDeviceFS)){GetPointerData(HID_Buffer);/* send data though IN endpoint*/if((HID_Buffer[0] != 0) || (HID_Buffer[1] != 0) || (HID_Buffer[2] != 0) || (HID_Buffer[3] != 0)){USBD_HID_SendReport(&hUsbDeviceFS, HID_Buffer, sizeof(HID_Buffer));}counter = 0;}
}在main.c文件中包含使用到的头文件,以及定义/声明使用到的一些变量,最后在主函数main()初始化外设完毕后以中断方式打开TIM6定时器即可,具体源代码如下所示
/*main.c文件中*/
/*包含头文件*/
#include "usbd_hid.h"/*定义/声明变量*/
extern USBD_HandleTypeDef hUsbDeviceFS;
#define CURSOR_STEP 7
uint8_t HID_Buffer[4];/*主函数进入主循环前启动TIM6定时器*/
HAL_TIM_Base_Start_IT(&htim6);4、烧录验证
烧录程序,使用USB连接线将开发板上USB_SALVE接口与Windows电脑的USB接口连接,连接成功后可以通过串口助手监视系统的运行
首先按下开发板上的KEY2和KEY0左右两个用户按键,可以发现电脑上的鼠标光标会随着按键的按下向左或者向右移动,然后按下WK_UP上方用户按键可以发现串口助手显示的内容被拉到最上方,也即实现了滚轮向上滚动,然后将鼠标光标移动到串口助手的打开/关闭串口按钮上,按下KEY1按键之后发现可以控制串口的打开/关闭,具体现象如下图所示
5、模拟键盘实验流程简述
5.0、前提知识
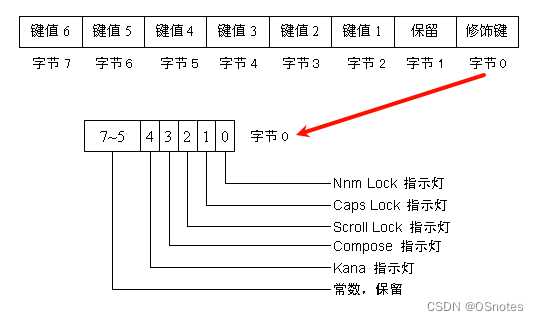
键盘设备和计算机通过USB通信采用HID的键盘协议,该协议由八个字节组成,用于向计算机报告当前键盘的状态,八个字节代表的含义如下图所示 (注释1)
5.1、CubeMX相关配置
无需做任何修改,直接使用模拟鼠标时生成的工程代码
5.2、生成代码
打开生成的工程代码,由于CubeMX默认将设备描述为了鼠标设备,可以在usbd_hid.c文件中找到一个名为HID_MOUSE_ReportDesc的数组,该数组正式鼠标报告设备描述符,因此需要将该设备描述符修改为键盘的设备描述符,同时也应该修改该报告设备描述符数组的大小HID_MOUSE_REPORT_DESC_SIZE ,具体修改内容如下所示 (注释2)
/*修改usbd_hid.c中的报告设备描述符*/
__ALIGN_BEGIN static uint8_t HID_MOUSE_ReportDesc[HID_MOUSE_REPORT_DESC_SIZE] __ALIGN_END =
{0x05, 0x01, // USAGE_PAGE (Generic Desktop) //630x09, 0x06, // USAGE (Keyboard)0xa1, 0x01, // COLLECTION (Application)0x05, 0x07, // USAGE_PAGE (Keyboard)0x19, 0xe0, // USAGE_MINIMUM (Keyboard LeftControl)0x29, 0xe7, // USAGE_MAXIMUM (Keyboard Right GUI)0x15, 0x00, // LOGICAL_MINIMUM (0)0x25, 0x01, // LOGICAL_MAXIMUM (1)0x75, 0x01, // REPORT_SIZE (1)0x95, 0x08, // REPORT_COUNT (8)0x81, 0x02, // INPUT (Data,Var,Abs)0x95, 0x01, // REPORT_COUNT (1)0x75, 0x08, // REPORT_SIZE (8)0x81, 0x03, // INPUT (Cnst,Var,Abs)0x95, 0x05, // REPORT_COUNT (5)0x75, 0x01, // REPORT_SIZE (1)0x05, 0x08, // USAGE_PAGE (LEDs)0x19, 0x01, // USAGE_MINIMUM (Num Lock)0x29, 0x05, // USAGE_MAXIMUM (Kana)0x91, 0x02, // OUTPUT (Data,Var,Abs)0x95, 0x01, // REPORT_COUNT (1)0x75, 0x03, // REPORT_SIZE (3)0x91, 0x03, // OUTPUT (Cnst,Var,Abs)0x95, 0x06, // REPORT_COUNT (6)0x75, 0x08, // REPORT_SIZE (8)0x15, 0x00, // LOGICAL_MINIMUM (0)0x25, 0x65, // LOGICAL_MAXIMUM (101)0x05, 0x07, // USAGE_PAGE (Keyboard)0x19, 0x00, // USAGE_MINIMUM (Reserved (no event indicated))0x29, 0x65, // USAGE_MAXIMUM (Keyboard Application)0x81, 0x00, // INPUT (Data,Ary,Abs)0xc0, // END_COLLECTION
};/*修改usbd_hid.h中的报告设备描述符大小*/
#define HID_MOUSE_REPORT_DESC_SIZE 63U修改报告设备描述符连接计算机之后,计算机就应该将其识别为一个键盘设备,计算机和该USB设备通信时就应该按照键盘设备的HID协议数据包进行数据解析,我们通过开发板上的四个按键来模拟键盘上的a/x/y/z四个按键,将程序直接实现在main.c文件中,具体源代码如下所示
/*设置鼠标指针坐标值*/
static void GetPointerData(uint8_t *pbuf)
{int8_t keyboard = 0;/*按键WK_UP被按下*/if(HAL_GPIO_ReadPin(WK_UP_GPIO_Port,WK_UP_Pin) == GPIO_PIN_SET){if(HAL_GPIO_ReadPin(WK_UP_GPIO_Port,WK_UP_Pin) == GPIO_PIN_SET){printf("WK_UP Pressed : a/A\r\n");keyboard = 0x04;while(HAL_GPIO_ReadPin(WK_UP_GPIO_Port,WK_UP_Pin));}}/*按键KEY2被按下*/if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin) == GPIO_PIN_RESET){printf("KEY2 Pressed : x/X\r\n");keyboard = 0x1B;while(!HAL_GPIO_ReadPin(KEY2_GPIO_Port,KEY2_Pin));}}/*按键KEY1被按下*/if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin) == GPIO_PIN_RESET){printf("KEY1 Pressed : y/Y\r\n");keyboard = 0x1C;while(!HAL_GPIO_ReadPin(KEY1_GPIO_Port,KEY1_Pin));}}/*按键KEY0被按下*/if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){if(HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin) == GPIO_PIN_RESET){printf("KEY0 Pressed : z/Z\r\n");keyboard = 0x1D;while(!HAL_GPIO_ReadPin(KEY0_GPIO_Port,KEY0_Pin));}}//合成键盘数据包for(uint8_t i=0;i<8;i++){if(i == 2) pbuf[i] = keyboard;else pbuf[i] = 0;}
}/*TIM6定时器1ms回调函数*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{static __IO uint32_t counter = 0;/* check Joystick state every polling interval (10ms) */if(counter++ == USBD_HID_GetPollingInterval(&hUsbDeviceFS)){GetPointerData(HID_Buffer);/* send data though IN endpoint*/USBD_HID_SendReport(&hUsbDeviceFS, HID_Buffer, sizeof(HID_Buffer));/* 重置counter */counter = 0;}
}5.3、烧录验证
烧录程序,使用USB连接线将开发板上USB_SALVE接口与Windows电脑的USB接口连接,连接成功后可以通过串口助手监视系统的运行
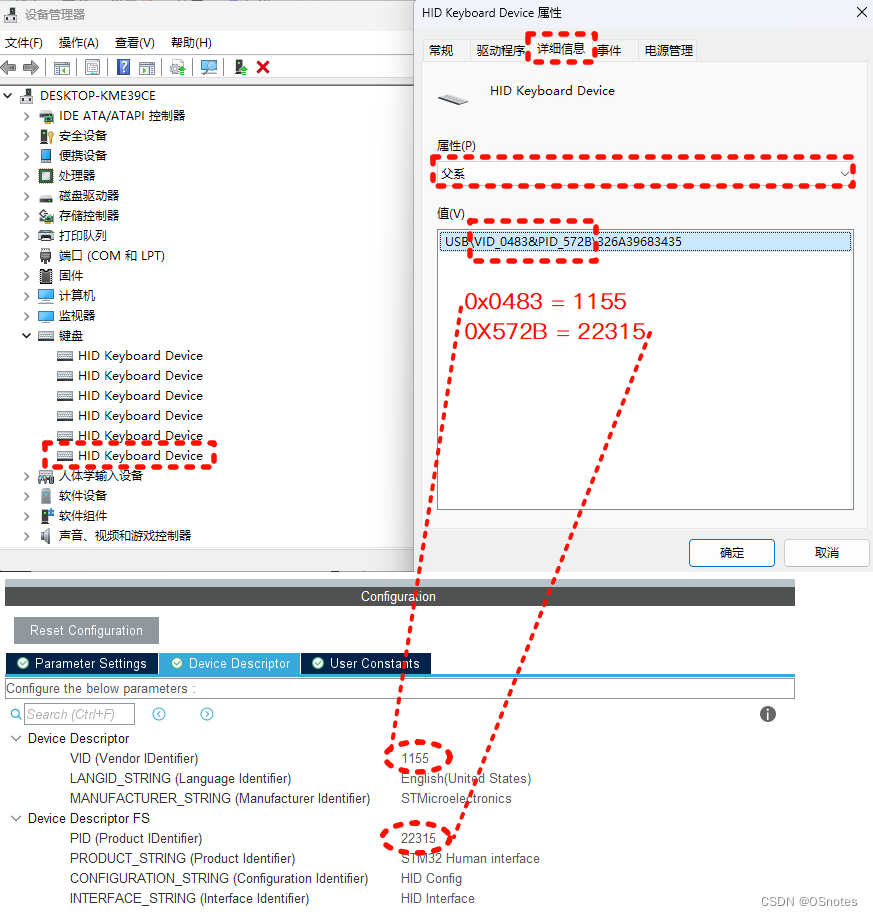
首先我们可以通过设备管理器查找一下该设备,看看Windwos将其识别为了什么设备,打开设备管理器,在键盘中找到最后一个,右键查看其属性,在详细信息页面属性中找到父系,在下方可以查看到该设备的VID和PID,可以发现和我们配置的HID设备描述中的ID一致,具体如下图所示
然后打开串口助手,将鼠标光标点击串口助手的发送数据区域,然后随机按下开发板上的四个用户按键,可以在串口助手发送数据区域发现每按下一个按键都会对应输出a、x、y、z四个字符,并且同时串口会输出哪个按键被按下的提示,具体现象如下图所示
6、常用函数
/*return polling interval from endpoint descriptor*/
uint32_t USBD_HID_GetPollingInterval(USBD_HandleTypeDef *pdev)
/*Send HID Report*/
uint8_t USBD_HID_SendReport(USBD_HandleTypeDef *pdev, uint8_t *report, uint16_t len)7、注释详解
注释1:图片来源 3、USB接口的键盘描述符范例
注释2:键盘的报告设备描述符来源 STM32CubeMX学习笔记(44)——USB接口使用(HID按键)
参考资料
微雪课堂:STM32CubeMX系列教程25:USB Device
相关文章:
STM32CubeMX教程31 USB_DEVICE - HID外设_模拟键盘或鼠标
目录 1、准备材料 2、实验目标 3、模拟鼠标实验流程 3.0、前提知识 3.1、CubeMX相关配置 3.1.0、工程基本配置 3.1.1、时钟树配置 3.1.2、外设参数配置 3.1.3、外设中断配置 3.2、生成代码 3.2.0、配置Project Manager页面 3.2.1、设初始化调用流程 3.2.2、外设中…...

知道Wi-Fi名称和密码之后自动连接
这里写自定义目录标题 有Wi-Fi名称和密码自动连接Wi-Fi主Activity服务类 WIFIStateReceiver工具类 WIFIConnectionManager 有Wi-Fi名称和密码自动连接Wi-Fi 主Activity public class MainActivity extends AppCompatActivity implements View.OnClickListener{private static…...

本地搭建Plex私人影音网站并结合内网穿透实现公网远程访问
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...
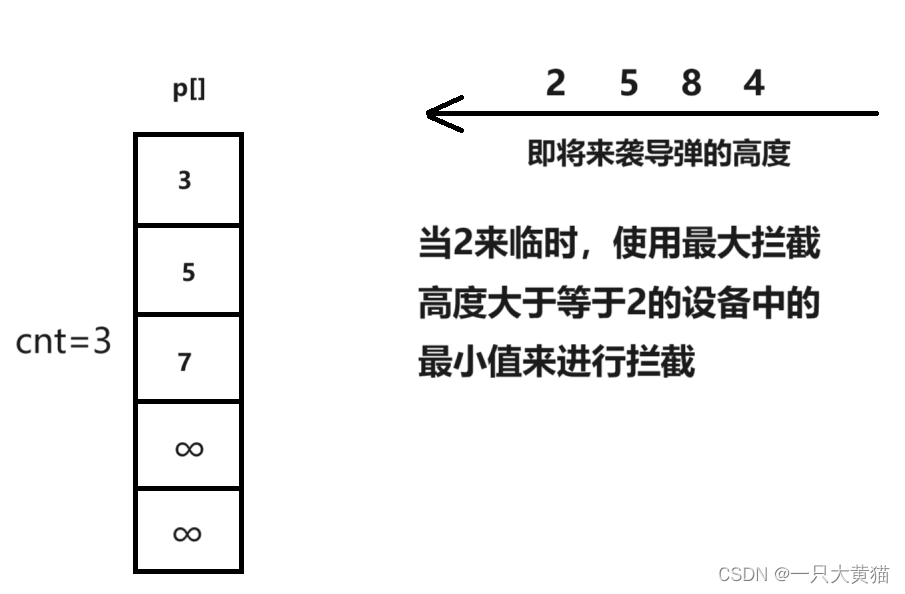
【算法】拦截导弹(线性DP)
题目 某国为了防御敌国的导弹袭击,发展出一种导弹拦截系统。 但是这种导弹拦截系统有一个缺陷:虽然它的第一发炮弹能够到达任意的高度,但是以后每一发炮弹都不能高于前一发的高度。 某天,雷达捕捉到敌国的导弹来袭。 由于该系…...
pr)
记 doris 加载压缩文件(lzo、snappy)pr
做了一个case,是doris支持加载lzo压缩文件。[improvement](load) Enable lzo & Remove dependency on Markus F.X.J. Oberhumers lzo library by HowardQin Pull Request #30573 apache/doris (github.com) 其实doris里已经支持了 lzo,这个case源…...
【Leetcode】2670. 找出不同元素数目差数组
文章目录 题目思路代码结果 题目 题目链接 给你一个下标从 0 开始的数组 nums ,数组长度为 n 。 nums 的 不同元素数目差 数组可以用一个长度为 n 的数组 diff 表示,其中 diff[i] 等于前缀 nums[0, …, i] 中不同元素的数目 减去 后缀 nums[i 1, …, …...
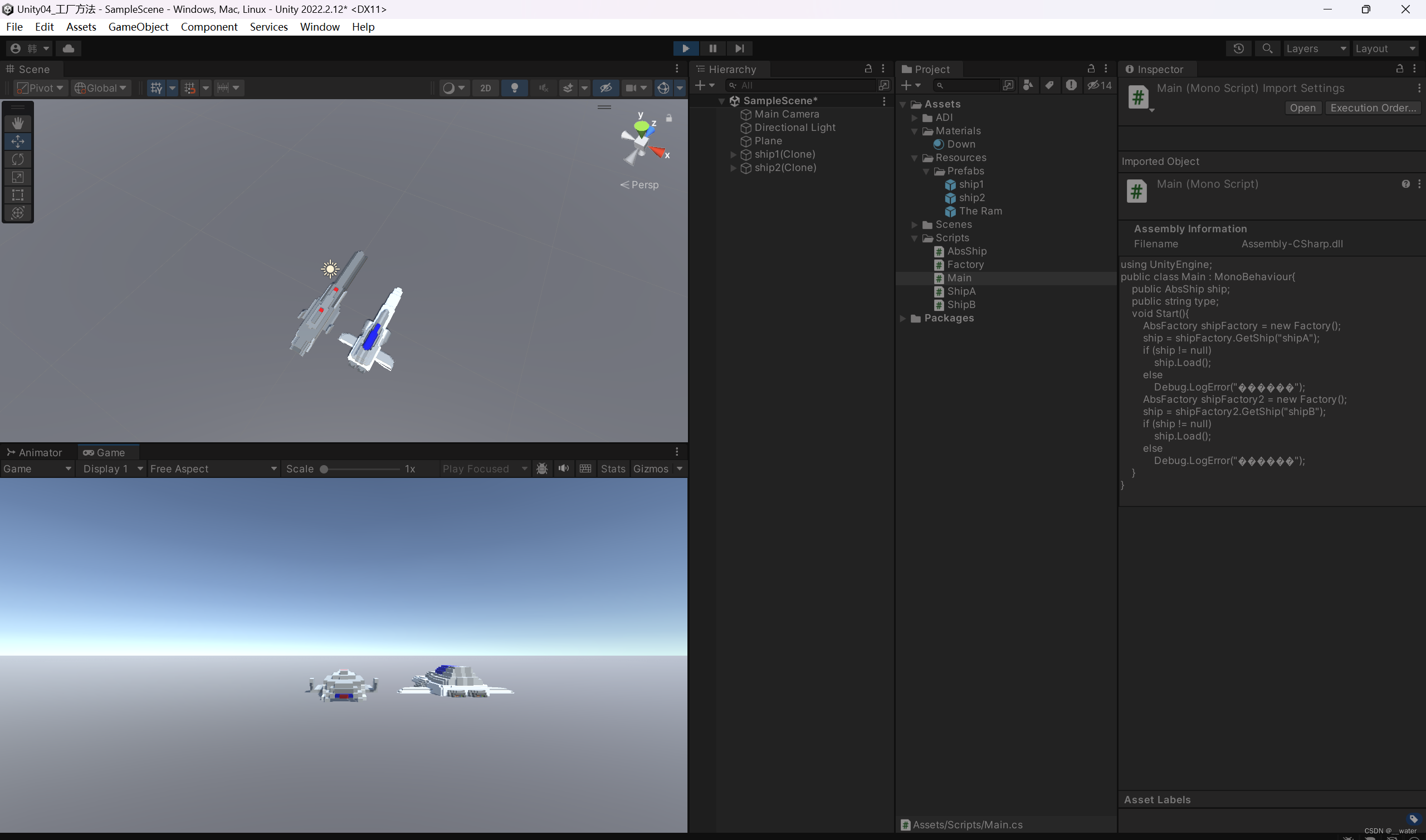
༺༽༾ཊ—Unity之-01-工厂方法模式—ཏ༿༼༻
首先创建一个项目, 在这个初始界面我们需要做一些准备工作, 建基础通用文件夹, 创建一个Plane 重置后 缩放100倍 加一个颜色, 任务:使用工厂方法模式 创建 飞船模型, 首先资源商店下载飞船模型,…...

QT仪表盘小工具
头文件: /**************************************************************************** ** ** Copyright (C) 2016 The Qt Company Ltd. ** Contact: https://www.qt.io/licensing/ ** ** This file is part of the examples of the Qt Toolkit. ** ** $QT_BEGIN_LICENSE…...

【2024】大三寒假再回首:缺乏自我意识是毒药,反思和回顾是解药
2024年初,学习状态回顾 开稿时间:2024-1-23 归家百里去,飘雪送客迟。 搁笔日又久,一顾迷惘时。 我们饱含着过去的习惯,缺乏自我意识是毒药,反思和回顾是解药。 文章目录 2024年初,学习状态回顾一…...

计算机网络——网络层(3)
计算机网络——网络层(3) 小程一言专栏链接: [link](http://t.csdnimg.cn/ZUTXU)1 网络层——控制平面因特网中自治系统内部的路由选择总括考虑因素总结 ISP之间的路由选择:BGP考虑因素总结 SDN控制层面重要组件和功能总结 ICMP主要功能和特点…...

ROS2 学习笔记12:使用 colcon 构建软件包
ROS2 学习笔记12:使用 colcon 构建软件包 Background 背景Prerequisites 前提1 Install colcon2 Install ROS 2 Basics 基础1 Create a workspace2 Add some sources3 Source an underlay4 Build the workspace5 Run tests6 Source the environment7 Try a demo Cre…...
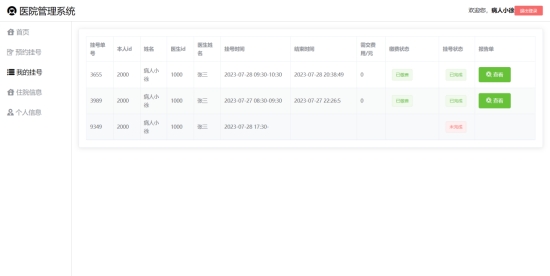
基于JAVA+SpringBoot+Vue的前后端分离的医院管理系统
✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景介绍: 随着计算机科学的迅猛…...

npm淘宝镜像过期解决办法
npm淘宝镜像过期解决办法 因为npm 官方镜像(registry.npmjs.org)在国内访问很慢,我们基本上都会选择切换到国内的一些 npm 镜像(淘宝镜像、腾讯云镜像等)。由于淘宝原来的镜像(registry.npm.taobao.org&am…...

Arduino 官网上下载和使用开发板
在 Arduino 官网上下载和使用开发板可以按照以下步骤进行: 打开浏览器,访问 Arduino 官网(https://www.arduino.cc/)。在官网首页,可以看到各种型号的 Arduino 开发板和相关产品。根据自己的需求选 择合适的开发板型号…...

k8s学习-DaemonSet和Job
1.1DaemonSet是什么 Deployment部署的副本Pod会分布在各个Node上,每个Node都可能运行好几个副本。DaemonSet的不同之处在于:每个Node上最多只能运行⼀个副本。DaemonSet的典型应用场景有: (1)在集群的每个节点上运⾏存…...

【开源】SpringBoot框架开发海南旅游景点推荐系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块2.1 用户端2.2 管理员端 三、系统展示四、核心代码4.1 随机景点推荐4.2 景点评价4.3 协同推荐算法4.4 网站登录4.5 查询景点美食 五、免责说明 一、摘要 1.1 项目介绍 基于VueSpringBootMySQL的海南旅游推荐系统ÿ…...
Windows10更新失败 错误 0x80070643、KB5034441的解决方法之二
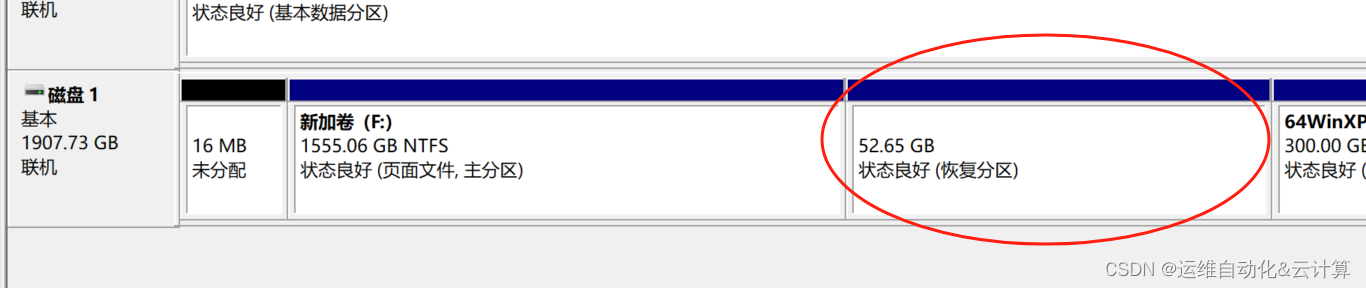
Windows10更新失败 错误 0x80070643、KB5034441 在知乎Windows10更新失败 错误 0x80070643、KB5034441的原因分析和几个解决方法 - 知乎 参考文章进行操作,更详细信息自己看上面链接。 我电脑的硬盘是mbr格式,而且没有划分恢复分区。 Microsoft Windo…...

SQL中LIMIT的简单用法
在SQL的世界里,有一位神秘而强大的限制者,它就是 LIMIT。今天,我们将深入探讨这个神秘的SQL关键字,揭开它的神秘面纱,让你能够更好地使用它来操控你的数据。 背景 首先,让我们了解一下为什么我们需要 LIM…...

canvas自定义扩展方法:文字自动换行
查看专栏目录 canvas实例应用100专栏,提供canvas的基础知识,高级动画,相关应用扩展等信息。canvas作为html的一部分,是图像图标地图可视化的一个重要的基础,学好了canvas,在其他的一些应用上将会起到非常重…...
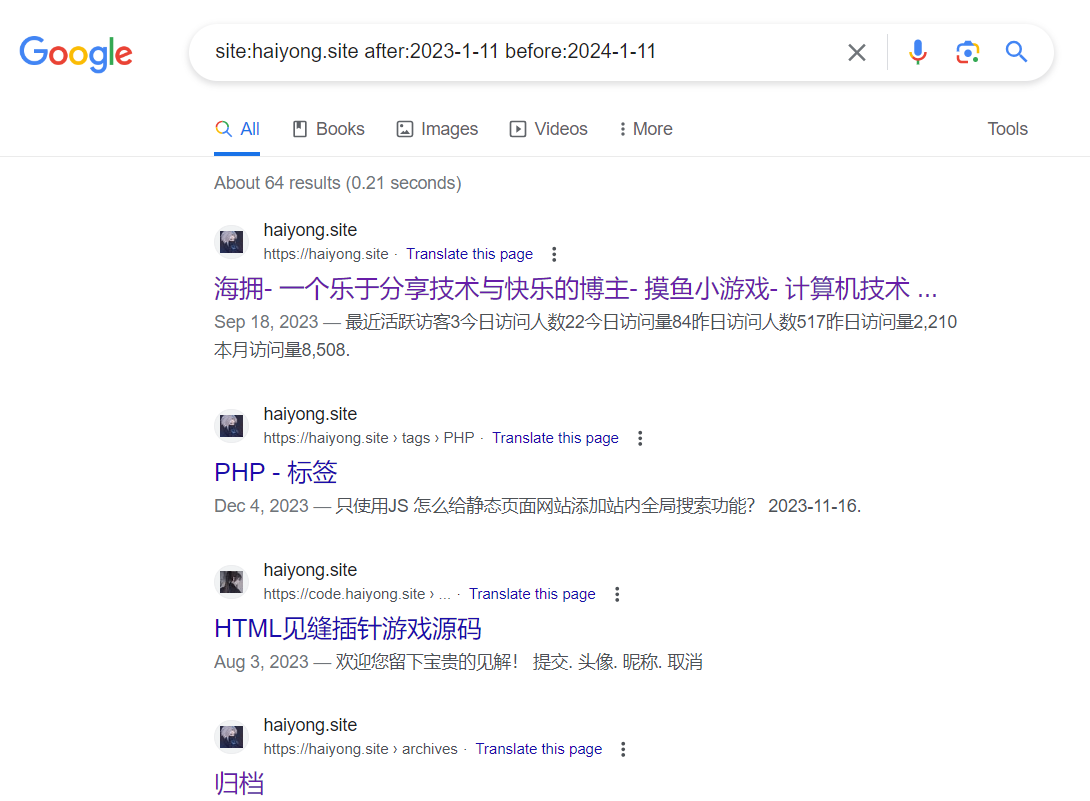
【2024全网最详细】Google 搜索命令终极指南
💂 个人网站:【 海拥】【神级代码资源网站】【办公神器】🤟 基于Web端打造的:👉轻量化工具创作平台💅 想寻找共同学习交流的小伙伴,请点击【全栈技术交流群】 你是否尝试过使用 Google 搜索作为免费的 SEO …...

Akamai通用版边缘认证参数固化与SHA256签名还原
1. 这不是“破解”,而是对Akamai边缘认证机制的一次系统性拆解你有没有遇到过这样的情况:写好一个爬虫,目标网站明明没上WAF、也没用Cloudflare,但一发请求就返回403,Header里还带着x-akamai-session-info这种神秘书码…...

如果夫妻双方也不愿意带孩子,家里也没有老人带孩子,还有必要生2胎吗?
这个问题没有绝对答案,需要结合你家的经济条件、精力储备和夫妻共识综合判断,没人带并不是一定不能生,但普通家庭确实要谨慎决策。结合你目前在南昌、夫妻二人都要兼顾工作的情况,帮你梳理核心决策维度: ✅ 满足以下条件,可以考虑生 经济条件足够支撑:你月收入2万以…...

好用只是入场券,敢用才是护城河:企业级Agent如何进入真实业务
好用只是入场券 2026 年,小龙虾、OpenClaw、Hermes 等 Agent 产品接连出圈之后,很多企业开始重新审视一件事:AI 不再只是一个回答问题的工具,它正在变成可以接任务、调系统、走流程的数字执行单元。 这件事在演示里通常很顺。 一句…...

嵌入式Linux入门首选:STM32MP157开发板核心优势与学习路径全解析
1. 项目概述:从“学什么”到“用什么学”的抉择每当有朋友或刚入行的新人问我,想入门嵌入式Linux,该从哪块板子开始,我的回答几乎总是绕不开STM32MP157。这听起来像是一个厂商的“标准答案”,但背后是我踩过无数坑、对…...

对比按量计费与套餐计划在长期项目中的成本差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按量计费与套餐计划在长期项目中的成本差异 在长期技术项目的规划中,成本管理是一个需要持续关注的环节。对于依赖…...

Ubuntu18多用户情况一用户桌面卡死,鼠标能动但点击没用——解决办法
按 Ctrl Alt F1到 F6中的某一个,切换到TTY终端,需要去试一下我的为F4输入用户名和密码然后输入:# 找到问题用户的会话ID loginctl list-sessions | grep username1# 终止该用户的图形会话(不会影响其他用户) sudo lo…...

SolveSpace参数化CAD设计:5大核心功能深度解析与实战指南
SolveSpace参数化CAD设计:5大核心功能深度解析与实战指南 【免费下载链接】solvespace Parametric 2d/3d CAD 项目地址: https://gitcode.com/gh_mirrors/so/solvespace SolveSpace是一款功能强大的开源参数化CAD软件,专为二维和三维建模设计而生…...

2026固态电池冬季续航实测:零下20℃仍跑600公里?
2026年固态电池量产车型对冬季续航提升的实际数据与技术解析 针对2026年固态电池量产车型在冬季续航方面的表现,目前尚无公开的、基于大规模量产车型的完整冬季实测数据。然而,结合固态电池的技术原理、已发布的实验室及小规模测试数据,以及…...

Mac应用卸载不干净?Pearcleaner帮你彻底清理,释放存储空间
Mac应用卸载不干净?Pearcleaner帮你彻底清理,释放存储空间 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾发现,…...

【笔试强训】Week5:空调遥控, kotor和气球,走迷宫,主持人调度II,体操队形,二叉树的最大路径和,排序子序列,消减整数
文章目录1. 空调遥控题目描述解题思路解法一:滑动窗口解法二:二分查找代码实现2. kotori和气球题目描述解题思路代码实现3. 走迷宫题目描述解题思路代码实现4. 主持人调度II题目描述解题思路代码实现5. 体操队形题目描述解题思路代码实现6. 二叉树的最大…...