Qt5 基于OpenGL实现六轴机械臂三维仿真
需求
在Qt中通过OPenGL方式加载三维模型STL文件,然后将多个结构的STL文件类型的模型进行组装,形成6轴机械臂三维模型的显示,并且可以对每个关节进行关节角度的控制。
新建一个C++类STLFileLoader,用于加载STL文件,并进行文件解析。
- 直接通过QT的QFile类进行文件读取,然后通过判断STL的格式进行文件解析,一种是ASCII格式stl文件,一种是二进制格式stl文件。
void STLFileLoader::loadStl(const QString &filename) {QFile file(filename);if (file.open(QIODevice::ReadOnly | QIODevice::Text)) {QByteArray arr;arr = file.read(5);file.close();if (arr == "solid") {loadTextStl(filename);} else {loadBinaryStl(filename);}} else {qDebug() << filename << u8"不存在";}
}
- 加载ASCII格式的STL文件:
- 清空之前加载的模型数据,以便重新加载新的STL文件。
- 创建一个 QFile 对象来打开指定的文件。
- 如果文件成功打开,则进入循环,逐行读取文件内容。
- 对于每一行,使用 trimmed() 函数去除首尾的空白字符,并将其分割成单词。
- 根据单词的内容,判断当前行属于STL文件中的哪一部分。
- 如果单词的第一个部分是 “facet”,表示当前行描述了一个三角形的法线。
- 如果单词的第一个部分是 “vertex”,表示当前行描述了一个三角形的顶点。
- 如果单词的第一个部分是 “endloop”,表示当前三角形描述结束,可以构建一个完整的三角形并将其添加到模型中。
- 在解析完整个文件后,关闭文件。
//加载ASCII格式STL文件
void STLFileLoader::loadTextStl(const QString &filename) {qDebug() << "load text file:" << filename;model.clear(); //清除模型QList <QVector3D> triangle;STLTriangle tSTLTriangle;QFile file(filename);if (file.open(QIODevice::ReadOnly | QIODevice::Text)) {while (!file.atEnd()) {QString line = file.readLine().trimmed();QStringList words = line.split(' ', QString::SkipEmptyParts);if (words[0] == "facet") {triangle.clear();tSTLTriangle.reset();tSTLTriangle.setNormal(words[2].toFloat(), words[3].toFloat(), words[4].toFloat());} else if (words[0] == "vertex") {triangle.append(QVector3D(words[1].toFloat(), words[2].toFloat(), words[3].toFloat()));} else if (words[0] == "endloop") {if (triangle.length() == 3) {for (int i = 0; i < 3; ++i) {tSTLTriangle.setVertex(i, triangle[i]);}model.append(tSTLTriangle);}}}file.close();}
}
- 加载二进制格式STL文件,速度更快
- 打印出要加载的二进制文件的名称,以便调试时查看。
- 清空之前加载的模型数据,以便重新加载新的STL文件。
- 创建一个 QFile 对象来打开指定的文件。
- 获取文件的大小,并根据文件大小动态分配内存缓冲区 buf。
- 尝试以只读方式打开文件,如果打开失败则返回。
- 创建一个 QDataStream 对象 stream,用于从文件中读取二进制数据。
- 使用 stream.readRawData() 从文件中读取所有数据到缓冲区 buf 中。
- 关闭文件。
- 设置指针 p 指向缓冲区的起始位置。
- 使用 memcpy() 从缓冲区中依次读取文件名、三角形个数以及每个三角形的法向量和顶点信息。
- 每次读取一个三角形的数据后,将其添加到模型中。
- 释放内存缓冲区。
void STLFileLoader::loadBinaryStl(const QString &filename) {qDebug() << "load Binary file:" << filename;model.clear(); //清除模型QList <QVector3D> triangle;STLTriangle tSTLTriangle;QFile STL_file(filename);int fileSize = STL_file.size();char *buf = (char *) malloc(sizeof(char) * fileSize);bool isOk = STL_file.open(QIODevice::ReadOnly);if (!isOk) return;QDataStream stream(&STL_file);stream.readRawData(buf, fileSize);STL_file.close();const char *p = buf;char name[80]; //起始80个字节 文件名int triangle_num; //4个字节 三角形个数float n1, n2, n3; //法向量float v1, v2, v3; //定点memcpy(name, p, 80); //记录文件名p += 80; //跳过文件名memcpy(&triangle_num, p, 4); //记录三角形个数p += 4; //跳过个数标识for (int i = 0; i < triangle_num; i++) { //读取法向量memcpy(&n1, p, 4);p += 4;memcpy(&n2, p, 4);p += 4;memcpy(&n3, p, 4);p += 4;triangle.clear();tSTLTriangle.reset();tSTLTriangle.setNormal(n1, n2, n3);for (int j = 0; j < 3; j++) { //读取顶点信息memcpy(&v1, p, 4);p += 4;memcpy(&v2, p, 4);p += 4;memcpy(&v3, p, 4);p += 4;triangle.append(QVector3D(v1, v2, v3));}if (triangle.length() == 3) {for (int i = 0; i < 3; ++i) {tSTLTriangle.setVertex(i, triangle[i]);}model.append(tSTLTriangle);}p += 2;//跳过尾部标志 两字节}free(buf);
}
- 绘制STL文件的三维模型
- 创建一个副本 triangles,以便遍历模型中的所有三角形。
- 使用 glBegin(GL_TRIANGLES) 开始绘制一个或多个三角形。
- 对于每个三角形,获取其法向量,并使用 glNormal3f() 函数设置法向量。
- 对于每个顶点,获取其坐标,并使用 glVertex3f() 函数设置顶点坐标。
- 完成一个三角形的绘制后,继续处理下一个三角形,直到所有三角形都绘制完成。
- 使用 glEnd() 结束绘制。
总之,这段代码使用OpenGL绘制了STL模型中的所有三角形,其中 mRatio 用于缩放模型,以便适应特定的显示区域。
void STLFileLoader::draw() {QList <STLTriangle> triangles = model;QVector3D normal;QVector3D vertex;glBegin(GL_TRIANGLES); // 绘制一个或多个三角形foreach(STLTriangle tri, triangles) {normal = tri.getNormal();glNormal3f(mRatio * normal.x(), mRatio * normal.y(), mRatio * normal.z());for (int j = 0; j < 3; ++j) {vertex = tri.getVertex(j);glVertex3f(mRatio * vertex.x(), mRatio * vertex.y(), mRatio * vertex.z());}}glEnd();
}
二、新建一个类RRGLWidget,继承QGLWidget,用于绘制OpenGL图形的小部件,实现展示3D模型。这个类提供了鼠标旋转、方法缩小、平移、网格、坐标系等基本功能。
- 绘制一个网格,使用OpenGL的基本绘图功能绘制一系列水平和垂直线段,表示平面上的网格效果。
- glPushMatrix(): 将当前的模型视图矩阵压入堆栈,保存当前坐标系的位置和状态。
- 定义一个颜色数组 color[],用来表示网格线的颜色。这里的颜色数组中的值是RGB颜色空间中的颜色分量,每个分量的取值范围在0到1之间。
- 使用 glMaterialfv(GL_FRONT, GL_AMBIENT_AND_DIFFUSE, color) 指定材质对漫射光的反射率,即设置网格线的颜色。
- 设定网格的步长和网格线的数量。
- 循环绘制水平和垂直方向的网格线。对于每一条水平线,绘制从左边界到右边界的线段;对于每一条垂直线,绘制从下边界到上边界的线段。
- glEnd(): 结束绘制线段的过程。
- glPopMatrix(): 弹出之前存储的模型视图矩阵,恢复坐标系的位置和状态到之前的状态。
总之,这段代码用于绘制一个网格,以辅助在OpenGL场景中定位和绘制其他图形。
void RRGLWidget::drawGrid() {glPushMatrix(); // 存储当前坐标系位置GLfloat color[] = {8.0f / 255, 108.0f / 255, 162.0f / 255};////// \brief glMaterialfv 指定材质对漫射光的反射率/// @param face 决定该材质运用于图元的正面还是反面/// @param pname 表示对何种光进行设置(环境光和漫射光)/// @param params 四维数组,这个数组描述了反光率的RGBA值,每一项取值都为0-1之间glMaterialfv(GL_FRONT, GL_AMBIENT_AND_DIFFUSE, color);int step = 50;int num = 15;for (int i = -num; i < num + 1; i++) {glBegin(GL_LINES);glVertex3f(i * step, -num * step, 0);glVertex3f(i * step, num * step, 0);glVertex3f(-num * step, i * step, 0);glVertex3f(num * step, i * step, 0);glEnd();}glPopMatrix(); // 恢复存储的坐标系位置
}
- 画坐标系
- glPushMatrix(): 将当前的模型视图矩阵压入堆栈,保存当前坐标系的位置和状态。
- **glLineWidth(2.0f): **设置线段的宽度为2.0个单位。
- **setupColor(255, 255, 255): **设置颜色为白色。该函数根据提供的RGB值设置OpenGL材质的颜色。
- **glBegin(GL_LINES): **开始绘制线段。
- 绘制X轴:从(-900, 0, 0)到(900, 0, 0)。
- 绘制Y轴:从(0, -900, 0)到(0, 900, 0)。
- 绘制Z轴:从(0, 0, 0)到(0, 0, 700)。
- **glEnd(): **结束绘制线段的过程。
- 绘制轴线上的标签:
- “-X” 在X轴负方向的末端。
- “+X” 在X轴正方向的末端。
- “-Y” 在Y轴负方向的末端。
- “+Y” 在Y轴正方向的末端。
- “+Z” 在Z轴正方向的末端。
- **glLineWidth(1.0f): **将线段的宽度恢复为默认值。
- **glPopMatrix(): **弹出之前存储的模型视图矩阵,恢复坐标系的位置和状态到之前的状态。
这段代码绘制了X、Y、Z三个轴线以及相应的标签,用于在OpenGL场景中表示坐标系。
void RRGLWidget::drawCoordinates() {glPushMatrix();glLineWidth(2.0f);setupColor(255, 255, 255);glBegin(GL_LINES);glVertex3f(-900, 0, 0);glVertex3f(900, 0, 0);glVertex3f(0, -900, 0);glVertex3f(0, 900, 0);glVertex3f(0, 0, 0);glVertex3f(0, 0, 700);glEnd();// 标签qglColor(QColor::fromRgbF(1, 0, 0));renderText(-900, 0, 0, "-X", QFont("helvetica", 12, QFont::Bold, true));renderText(900, 0, 0, "+X", QFont("helvetica", 12, QFont::Bold, true));qglColor(QColor::fromRgbF(0, 1, 0));renderText(0, -900, 0, "-Y", QFont("helvetica", 12, QFont::Bold, true));renderText(0, 900, 0, "+Y", QFont("helvetica", 12, QFont::Bold, true));qglColor(QColor::fromRgbF(0, 0, 1));renderText(0, 0, 700, "+Z", QFont("helvetica", 12, QFont::Bold, true));glLineWidth(1.0f);glPopMatrix();
}
- 画每个组件变换后的坐标系,同上。
void RRGLWidget::drawSTLCoordinates(int r, int g, int b) {glPushMatrix();glLineWidth(1.5f);setupColor(r, g, b);glBegin(GL_LINES);glVertex3f(-300, 0, 0);glVertex3f(300, 0, 0);glVertex3f(0, -300, 0);glVertex3f(0, 300, 0);glVertex3f(0, 0, 0);glVertex3f(0, 0, 500);glEnd();// 标签qglColor(QColor::fromRgbF(1, 0, 0));renderText(-300, 0, 0, "-X", QFont("helvetica", 12, QFont::Bold, true));renderText(300, 0, 0, "+X", QFont("helvetica", 12, QFont::Bold, true));qglColor(QColor::fromRgbF(0, 1, 0));renderText(0, -300, 0, "-Y", QFont("helvetica", 12, QFont::Bold, true));renderText(0, 300, 0, "+Y", QFont("helvetica", 12, QFont::Bold, true));qglColor(QColor::fromRgbF(0, 0, 1));renderText(0, 0, 500, "+Z", QFont("helvetica", 12, QFont::Bold, true));glLineWidth(1.0f);glPopMatrix();
}- 设置显示颜色
void RRGLWidget::setupColor(int r, int g, int b) {GLfloat color[] = {static_cast<GLfloat>(r / 255.0), static_cast<GLfloat>(g / 255.0),static_cast<GLfloat>(b / 255.0)};glMaterialfv(GL_FRONT, GL_AMBIENT_AND_DIFFUSE, color);
}
- 设置x、y轴旋转和平移
- RRGLWidget::setXRotation(int angle): 设置X轴方向的旋转角度。参数 angle 表示要旋转的角度值。如果新的角度值不等于之前的角度值 xRot,则更新 xRot,发出信号 xRotationChanged(angle),清除颜色缓冲区和深度缓冲区,并调用 updateGL() 更新OpenGL场景。
- RRGLWidget::setYRotation(int angle): 设置Y轴方向的旋转角度。参数 angle 表示要旋转的角度值。如果新的角度值不等于之前的角度值 yRot,则更新 yRot,发出信号 yRotationChanged(angle),清除颜色缓冲区和深度缓冲区,但不调用 updateGL() 更新OpenGL场景。
- RRGLWidget::setXYTranslate(int dx, int dy): 设置X和Y轴方向的平移量。参数 dx 和 dy 分别表示在X和Y轴上的位移量。根据 dx 和 dy 更新 xTran 和 yTran 的值,然后调用 updateGL() 更新OpenGL场景,实现平移效果。
这些函数可以通过外部调用来控制OpenGL场景中视角的旋转和平移。
void RRGLWidget::setXRotation(int angle) {int tangle = angle; // normalizeAngle(angle);if (tangle != xRot) {xRot = tangle;emit xRotationChanged(angle);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);updateGL();}
}void RRGLWidget::setYRotation(int angle) {int tangle = angle; // normalizeAngle(angle);if (tangle != yRot) {yRot = tangle;emit yRotationChanged(angle);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);}
}void RRGLWidget::setXYTranslate(int dx, int dy) {xTran += 3.0 * dx;yTran -= 3.0 * dy;updateGL();
}- 重新基类QGLWidget中的部分方法
void initializeGL() override;void paintGL() override;void resizeGL(int w, int h) override;void mousePressEvent(QMouseEvent *event) override;void mouseMoveEvent(QMouseEvent *event) override;
6.1 初始化OPenGL环境
- GLfloat ambientLight[] = {0.7f, 0.7f, 0.7f, 1.0f};: 定义了环境光的强度数组,包含RGBA值,表示光的颜色和强度。
- GLfloat diffuseLight[] = {0.7f, 0.8f, 0.8f, 1.0f};: 定义了散射光的强度数组,包含RGBA值,表示光的颜色和强度。
- GLfloat specularLight[] = {0.4f, 0.4f, 0.4f, 1.0f};: 定义了镜面反射光的强度数组,包含RGBA值,表示光的颜色和强度。
- GLfloat positionLight[] = {20.0f, 20.0f, 20.0f, 0.0f};: 定义了光源的位置数组,包含X、Y、Z坐标和一个额外的参数。
- glLightfv(GL_LIGHT0, GL_AMBIENT, ambientLight);: 设置0号光源的环境光属性。
- glLightfv(GL_LIGHT0, GL_DIFFUSE, diffuseLight);: 设置0号光源的散射光属性。
- glLightfv(GL_LIGHT0, GL_SPECULAR, specularLight);: 设置0号光源的镜面反射光属性。
- glLightModelf(GL_LIGHT_MODEL_TWO_SIDE, 1.0);: 设置照明模型参数,启用双面照明。
- glLightfv(GL_LIGHT0, GL_POSITION, positionLight);: 设置0号光源的位置属性。
- glEnable(GL_LIGHTING);: 启用光照。
- glEnable(GL_LIGHT0);: 打开光源。
- glClearDepth(1.0);: 设置深度缓存。
- glEnable(GL_DEPTH_TEST);: 启用深度测试。
- glDepthFunc(GL_LEQUAL);: 设置深度测试的类型。
- glEnable(GL_NORMALIZE);: 启用法线向量的自动归一化。
- glClearColor(0.0, 0.0, 0.0, 1.0);: 设置背景清除颜色为黑色。
这些操作旨在配置OpenGL环境,包括光照、深度测试和背景颜色等,以便正确显示OpenGL场景。
void RRGLWidget::initializeGL() {//用来初始化这个OpenGL窗口部件的,可以在里面设定一些有关选项GLfloat ambientLight[] = {0.7f, 0.7f, 0.7f, 1.0f}; //光源环境光强度数组GLfloat diffuseLight[] = {0.7f, 0.8f, 0.8f, 1.0f}; //光源散射光强度数组GLfloat specularLight[] = {0.4f, 0.4f, 0.4f, 1.0f}; //光源镜面反射光强度数组GLfloat positionLight[] = {20.0f, 20.0f, 20.0f, 0.0f}; //光源位置数组glLightfv(GL_LIGHT0, GL_AMBIENT, ambientLight); //设置0号光源的环境光属性glLightfv(GL_LIGHT0, GL_DIFFUSE, diffuseLight); //设置0号光源的散射光属性glLightfv(GL_LIGHT0, GL_SPECULAR, specularLight); //设置0号光源的镜面反射光属性glLightModelf(GL_LIGHT_MODEL_TWO_SIDE, 1.0); //设置照明模型参数glLightfv(GL_LIGHT0, GL_POSITION, positionLight); //设置0号光源的位置属性glEnable(GL_LIGHTING); //启用光照glEnable(GL_LIGHT0); //打开光源//glEnable(GL_DEPTH_TEST); //隐藏表面消除,打开深度缓冲区,绘制3D图像时候使用glClearDepth(1.0); // 设置深度缓存glEnable(GL_DEPTH_TEST); // 启用深度测试glDepthFunc(GL_LEQUAL); // 设置深度测试的类型glEnable(GL_NORMALIZE);glClearColor(0.0, 0.0, 0.0, 1.0);
}
6.2 窗口大小变化,width和height就是新的大小状态下的宽和高,另外resizeGL()在处理完后会自动刷新屏幕。
void RRGLWidget::resizeGL(int w, int h) {if (w < 0 || h < 0) {return;}glViewport(0, 0, w, h);glMatrixMode(GL_PROJECTION);glLoadIdentity();GLfloat zNear = 1.0;GLfloat zFar = 20000.0;GLfloat aspect = (GLfloat) w / (GLfloat) h;GLfloat fH = tan(GLfloat(70.0 / 360.0 * 3.14159)) * zNear;GLfloat fW = fH * aspect;glFrustum(-fW, fW, -fH, fH, zNear, zFar); //将当前矩阵与一个透视矩阵相乘,把当前矩阵转变成透视矩阵,glMatrixMode(GL_MODELVIEW);glLoadIdentity();glTranslated(0.0, 0.0, -40.0);
}
6.3 鼠标按下和移动
- mousePressEvent: 当鼠标按下时调用,记录当前鼠标位置为 lastPos。
- mouseMoveEvent: 当鼠标移动时调用,计算鼠标移动的增量 dx 和 dy,然后根据鼠标按键的不同执行不同的操作:
- 如果按下的是左键 (Qt::LeftButton),则调用 setXRotation 和 setYRotation 函数来设置 X 和 Y 轴的旋转角度,以实现场景的旋转。
- 如果按下的是右键 (Qt::RightButton),则调用 setZoom 函数来设置缩放参数,以实现场景的缩放。
- 如果按下的是中键 (Qt::MidButton),则调用 setXYTranslate 函数来设置 X 和 Y 轴的平移参数,以实现场景的平移。
这些操作使得用户可以通过鼠标在 OpenGL 窗口中交互式地旋转、缩放和平移场景。
void RRGLWidget::mousePressEvent(QMouseEvent *event) {lastPos = event->pos();
}void RRGLWidget::mouseMoveEvent(QMouseEvent *event) {int dx = event->x() - lastPos.x();int dy = event->y() - lastPos.y();// 这里必须使用buttons()if (event->buttons() & Qt::LeftButton) { //进行的按位与setXRotation(xRot + 4 * dy);setYRotation(yRot - 4 * dx);} else if (event->buttons() & Qt::RightButton) {setZoom(z_zoom + 5.0 * dy);} else if (event->buttons() & Qt::MidButton) {setXYTranslate(dx, dy);}lastPos = event->pos();
}加载六轴机械臂三维模型,绘制OPenGL场景,搭建机械臂3D模型
- 新建C++类DDR6RobotWidget,继承RRGLWidget。我们需要绘制机械臂模型、再加上一个实验桌。
/// 7个小部件组成typedef struct DD6RobotModel {STLFileLoader *link0;STLFileLoader *link1;STLFileLoader *link2;STLFileLoader *link3;STLFileLoader *link4;STLFileLoader *link5;STLFileLoader *link6;} DDR6RobotSTLModel;/// 桌子typedef struct DeskModel {STLFileLoader *link0;} DeskModel;/// 机械臂模型DDR6RobotSTLModel mRobotModel;/// 桌子模型DeskModel mDeskModel;
- 通过STLFileLoader类加载STL文件
void DDR6RobotWidget::loadRobotModelSTLFile() {//模型由7个小部件组成mRobotModel.link0 = new STLFileLoader(":/res/binary/base_link.STL", 1000);mRobotModel.link1 = new STLFileLoader(":/res/binary/link_1.STL", 1000);mRobotModel.link2 = new STLFileLoader(":/res/binary/link_2.STL", 1000);mRobotModel.link3 = new STLFileLoader(":/res/binary/link_3.stl", 1000);mRobotModel.link4 = new STLFileLoader(":/res/binary/link_4.STL", 1000);mRobotModel.link5 = new STLFileLoader(":/res/binary/link_5.STL", 1000);mRobotModel.link6 = new STLFileLoader(":/res/binary/link_6.STL", 1000);mDeskModel.link0 = new STLFileLoader(":/res/binary/desk.stl", 1);
}- 配置模型的相关参数
void DDR6RobotWidget::configureModelParams() {//注意:经过旋转、平移后坐标系会改变mRobotConfig.d = {0, 127.00, -122.00, -101.00, -1.0, 0.00, 0.00}; //沿z轴平移mRobotConfig.JVars = {0, 0, 0, 0, 0, 0, 0}; //绕z轴旋转角度mRobotConfig.a = {0, 0, 0, 0, 0, 0, 0}; //沿x轴平移mRobotConfig.alpha = {0, 0, 180.00, 0, 0, 0, 0}; //绕X轴旋转角度// 默认开启网格mGlobalConfig = {true, false, false, false, false, false, false, false, false};
}- 重新基类RRGLWidget的drawGL()方法,将机械臂的各个关节进行组装,这里需要对各个关节的坐标系进行不断地调整。此处待优化,调整坐标系不通用,这里写死了。
调用一系列 OpenGL 函数来绘制每个关节的连杆,并根据机器人的当前状态(位置、姿态等)调整每个连杆的位置和方向。
以下是主要的步骤:
- 调用 drawGrid()、drawCoordinates() 和 drawGLForDesk() 函数绘制网格、坐标系和机器人的底座。
- 绘制每个关节的连杆:
- 对于每个关节,根据机器人当前配置(位置和姿态)调用 glTranslatef() 和 glRotatef() 函数来调整坐标系,并使用 mRobotModel 中对应的 draw() 函数来绘制连杆。
- 如果需要,绘制每个关节的坐标系:
- 调用 drawSTLCoordinates() 函数来绘制每个关节的坐标系。
- 使用 glPopMatrix() 恢复初始坐标系。
void DDR6RobotWidget::drawGL() {//方法:不断调整每个link的坐标系(glTranslatef、glRotatef),依次组合起所有link//TODO: 此处待优化,调整坐标系不通用,这里写死了glPushMatrix();if (mGlobalConfig.isDrawGrid) drawGrid();if (mGlobalConfig.isDrawWorldCoord) drawCoordinates();if (mGlobalConfig.isDrawDesk) drawGLForDesk();// 基座setupColor(20, 126, 60);mRobotModel.link0->draw();// 一关节if (mGlobalConfig.isDrawJoint1Coord) {drawSTLCoordinates(255, 0, 0);}setupColor(169, 169, 169);glTranslatef(0.0, 0.0, mRobotConfig.d[1]); // z轴方向平移glRotatef(mRobotConfig.JVars[1], 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[1], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[1], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link1->draw();// 调整坐标系glRotatef(90, 1.0, 0.0, 0.0);// 二关节 修改2关节的Z轴 +90if (mGlobalConfig.isDrawJoint2Coord) {drawSTLCoordinates(0, 255, 0);}setupColor(20, 126, 60);glTranslatef(0.0, 0.0, mRobotConfig.d[2]); // z轴方向平移glRotatef(mRobotConfig.JVars[2] + 90, 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[2], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[2], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link2->draw();// 调整坐标系glTranslatef(300, 0.0, 0.0);// 三关节if (mGlobalConfig.isDrawJoint3Coord) {drawSTLCoordinates(0, 0, 255);}setupColor(169, 169, 169);glTranslatef(0.0, 0.0, mRobotConfig.d[3]); // z轴方向平移glRotatef(mRobotConfig.JVars[3], 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[3], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[3], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link3->draw();// 调整坐标系glTranslatef(260, 0.0, 0.0);glRotatef(-90, 0.0, 0.0, 1.0); // 绕x轴旋转// 四关节if (mGlobalConfig.isDrawJoint4Coord) {drawSTLCoordinates(255, 255, 0);}setupColor(20, 126, 60);glTranslatef(0.0, 0.0, mRobotConfig.d[4]); // z轴方向平移glRotatef(mRobotConfig.JVars[4], 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[4], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[4], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link4->draw();// 调整坐标系glTranslatef(0.0, 0.0, 110.0);glRotatef(-90, 1.0, 0.0, 0.0); // 绕x轴旋转// 五关节if (mGlobalConfig.isDrawJoint5Coord) {drawSTLCoordinates(0, 255, 255);}setupColor(169, 169, 169);glTranslatef(0.0, 0.0, mRobotConfig.d[5]); // z轴方向平移glRotatef(mRobotConfig.JVars[5], 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[5], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[5], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link5->draw();// 调整坐标系glTranslatef(0.0, 0.0, 110.0);glRotatef(90, 1.0, 0.0, 0.0); // 绕x轴逆时针旋转90°// 六关节if (mGlobalConfig.isDrawJoint6Coord) {drawSTLCoordinates(255, 0, 255);}setupColor(20, 126, 60);glTranslatef(0.0, 0.0, mRobotConfig.d[6]); // z轴方向平移glRotatef(mRobotConfig.JVars[6], 0.0, 0.0, 1.0); // 绕z轴旋转glTranslatef(mRobotConfig.a[6], 0.0, 0.0); // x轴方向平移glRotatef(mRobotConfig.alpha[6], 1.0, 0.0, 0.0); // 绕x轴旋转mRobotModel.link6->draw();glPopMatrix();
}
- 重新基类RRGLWidget的paintGL()方法,绘制OpenGL的窗口
具体步骤如下:
- 调用 glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT) 函数清除颜色缓存和深度缓存。
- 使用 glPushMatrix() 函数保存当前的模型视图矩阵状态,以便后续的绘制操作。
- 使用 glTranslated() 函数根据用户的缩放操作调整视图的缩放比例。
- 使用 glTranslated() 函数根据用户的平移操作调整视图的平移位置。
- 使用 glRotated() 函数根据用户的旋转操作绕 x、y 和 z 轴进行旋转。
- 调用 drawGL() 函数绘制机器人的三维模型。
- 使用 glPopMatrix() 函数恢复之前保存的模型视图矩阵状态,以确保后续的绘制操作不受影响。
这段代码的主要作用是在每次窗口需要重新绘制时,更新机器人模型的位置、姿态和大小,并根据用户的操作实时更新视图。
void DDR6RobotWidget::paintGL() {glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); //清除屏幕和深度缓存glPushMatrix();glTranslated(0, 0, z_zoom);glTranslated(xTran, yTran, 0);glRotated(xRot / 16.0, 1.0, 0.0, 0.0); //绕x轴旋转glRotated(yRot / 16.0, 0.0, 1.0, 0.0); //绕y轴旋转glRotated(zRot / 16.0, 0.0, 0.0, 1.0); //绕z轴旋转glRotated(+90.0, 1.0, 0.0, 0.0);drawGL();glPopMatrix();
}
新建一个控制机械臂模型的Qt QWidget窗口RobotControlForm,用于控制各个关节的角度 ,以及相关配置的显示和隐藏。
- 这个类里面主要通过控制UI控件,触发相应的信号,没有其他特殊的处理。
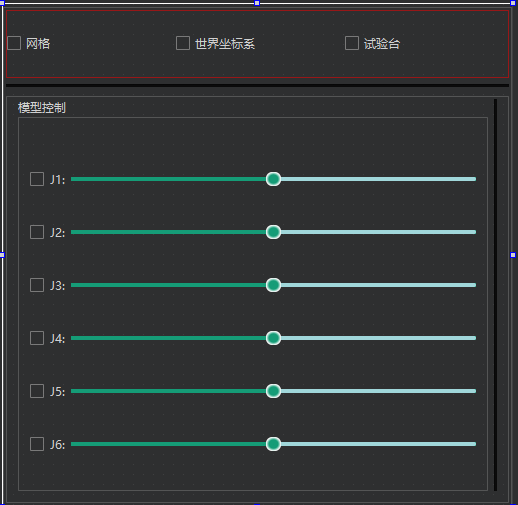
- 初始化UI界面控件的信号和槽函数
void RobotControlForm::initializeWindow() {//隐藏关节坐标系QList<QCheckBox *> cks = ui->groupBoxRobot->findChildren<QCheckBox *>();for (auto &item : cks) {item->hide();}// 滑动条QList < QSlider * > SliderList = ui->groupBoxRobot->findChildren<QSlider *>();for (int i = 0; i < SliderList.size(); i++) {QSlider *slider = SliderList.at(i);slider->setMinimum(-180);slider->setMaximum(180);slider->setTickInterval(1);connect(slider, &QSlider::valueChanged, this, &RobotControlForm::slotUpdateJVarsValue, Qt::UniqueConnection);slider->setValue(0);}// checkBox 环境变化connect(ui->checkBoxGrid_real, &QCheckBox::stateChanged, this, [=](int state) {if (state == 0) {slotCheckStateChanged(false);} else if (state == 2) {slotCheckStateChanged(true);}});connect(ui->checkBoxWorldCoordinate_real, &QCheckBox::stateChanged, this, [=](int state) {if (state == 0) {slotCheckStateChanged(false);} else if (state == 2) {slotCheckStateChanged(true);}});connect(ui->checkBoxDesk_real, &QCheckBox::stateChanged, this, [=](int state) {if (state == 0) {slotCheckStateChanged(false);} else if (state == 2) {slotCheckStateChanged(true);}});
}void RobotControlForm::slotUpdateJVarsValue(int value) {QSlider *slider = (QSlider *) sender();QString objectName = slider->objectName();QString index = objectName.at(objectName.size() - 1);emit sigJoinValueChanged(index.toInt(), value);
}void RobotControlForm::slotCheckStateChanged(bool value) {if (sender()->objectName() == "checkBox_showModel") {emit sigSetModelRealTimeShow(value);return;}emit sigCheckStateChanged();
}新建一个Qt QWidget类Robot3DForDDR6Form,用于显示三维模型和模型控制界面。
界面上两个窗口,一个继承DDR6RobotWidget,用于显示模型
一个集成RobotControlForm,用于显示机械臂模型控制界面。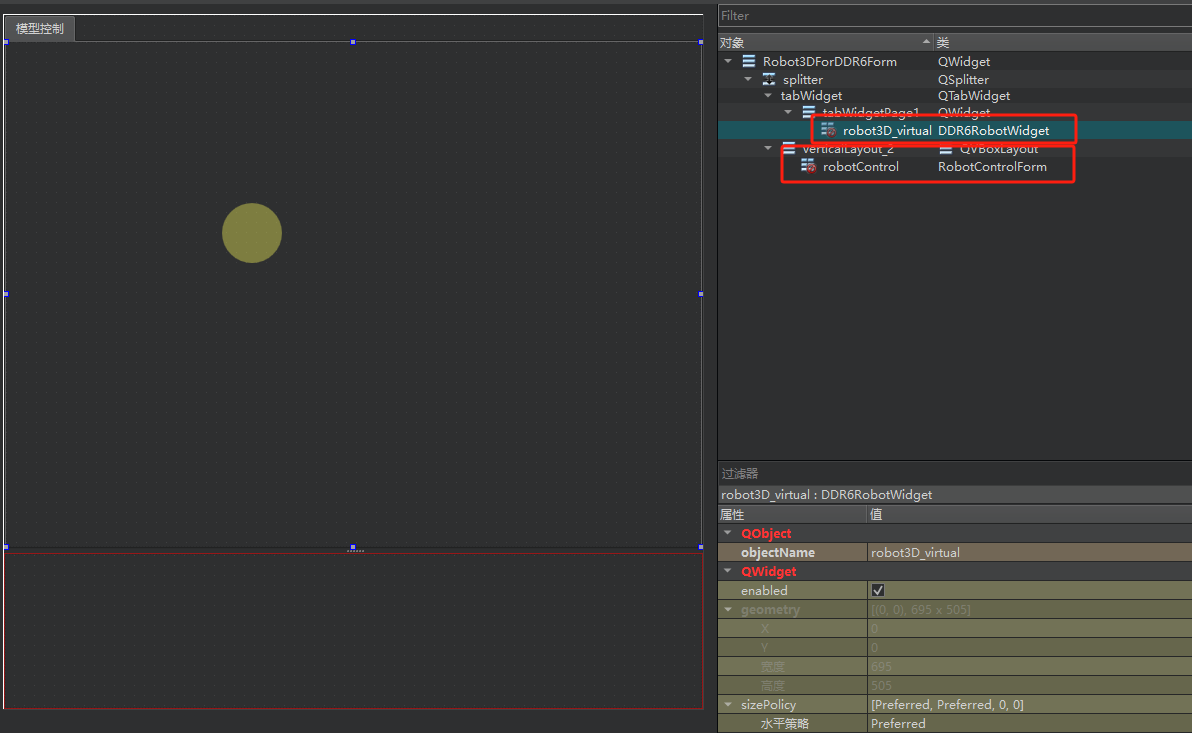
- 当我们在RobotControlForm进行滑动条变化,来控制机械臂模型时,会触发信号sigJoinValueChanged(),此处进行相应的处理。
connect(ui->robotControl, &RobotControlForm::sigJoinValueChanged, this,&Robot3DForDDR6Form::slotJVarsValueChange, Qt::UniqueConnection);void Robot3DForDDR6Form::slotJVarsValueChange(int index, int value) {ui->robot3D_virtual->mRobotConfig.JVars[index] = value;if (index == 2) {ui->robot3D_virtual->mRobotConfig.JVars[index] = -value;}ui->robot3D_virtual->update();
}
- 当我们在RobotControlForm进行勾选框变化时,来控制场景中的坐标系、桌子等显示和隐藏,会触发信号sigCheckStateChanged(),此处进行相应的处理。
connect(ui->robotControl, &RobotControlForm::sigCheckStateChanged, this,&Robot3DForDDR6Form::slotUpdateGlobalConfig, Qt::UniqueConnection);
void Robot3DForDDR6Form::slotUpdateGlobalConfig() {ui->robot3D_virtual->mGlobalConfig.isDrawGrid = ui->robotControl->getIsRealGridChecked();ui->robot3D_virtual->mGlobalConfig.isDrawWorldCoord = ui->robotControl->getIsRealWorldCoord();ui->robot3D_virtual->mGlobalConfig.isDrawDesk = ui->robotControl->getIsRealShowDesk();ui->robot3D_virtual->mGlobalConfig.isDrawJoint1Coord = ui->robotControl->getIsJointChecked(1);ui->robot3D_virtual->mGlobalConfig.isDrawJoint2Coord = ui->robotControl->getIsJointChecked(2);ui->robot3D_virtual->mGlobalConfig.isDrawJoint3Coord = ui->robotControl->getIsJointChecked(3);ui->robot3D_virtual->mGlobalConfig.isDrawJoint4Coord = ui->robotControl->getIsJointChecked(4);ui->robot3D_virtual->mGlobalConfig.isDrawJoint5Coord = ui->robotControl->getIsJointChecked(5);ui->robot3D_virtual->mGlobalConfig.isDrawJoint6Coord = ui->robotControl->getIsJointChecked(6);ui->robot3D_virtual->updateGL();
}
效果:至此我们完成了整个机械臂的三维模型的搭建显示,已经相应的控制。
源代码链接
Qt5 基于OpenGL实现六轴机械臂三维仿真
https://download.csdn.net/download/ever__ever/88800031?spm=1001.2014.3001.5501
相关文章:
Qt5 基于OpenGL实现六轴机械臂三维仿真
需求 在Qt中通过OPenGL方式加载三维模型STL文件,然后将多个结构的STL文件类型的模型进行组装,形成6轴机械臂三维模型的显示,并且可以对每个关节进行关节角度的控制。 新建一个C类STLFileLoader,用于加载STL文件,并进…...
路由进阶
文章目录 1.路由的封装抽离2.声明式导航 - 导航链接3.声明式导航-两个类名自定义匹配的类名 4.声明式导航 - 跳转传参查询参数传参动态路传参两种传参方式的区别动态路由参数可选符 5.Vue路由 - 重定向6.Vue路由 - 4047.Vue路由 - 模式设置8.编程式导航 - 两种路由跳转9.编程式…...
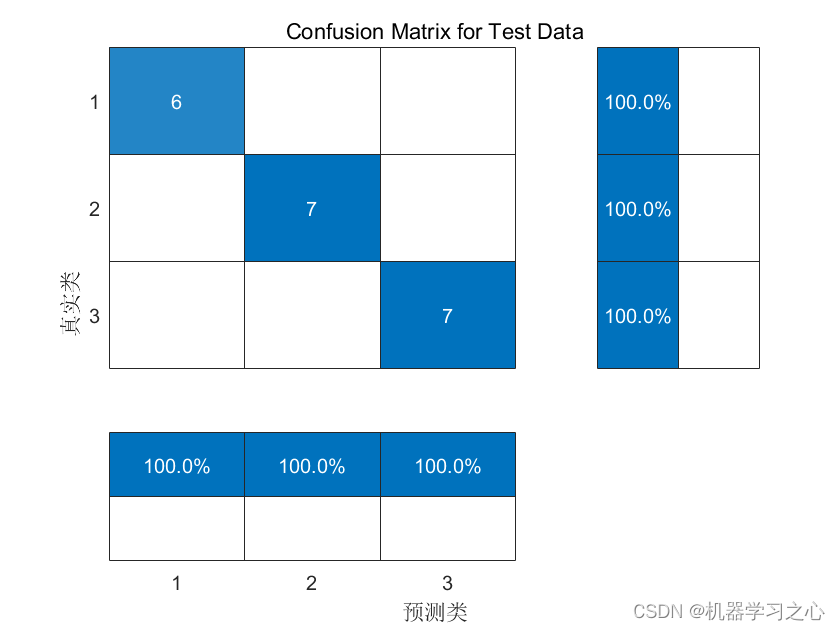
分类预测 | Matlab实现SCN-Adaboost随机配置网络模型SCN的Adaboost数据分类预测/故障识别
分类预测 | Matlab实现SCN-Adaboost随机配置网络模型SCN的Adaboost数据分类预测/故障识别 目录 分类预测 | Matlab实现SCN-Adaboost随机配置网络模型SCN的Adaboost数据分类预测/故障识别分类效果基本描述程序设计参考资料 分类效果 基本描述 1.Matlab实现SCN-Adaboost随机配置网…...
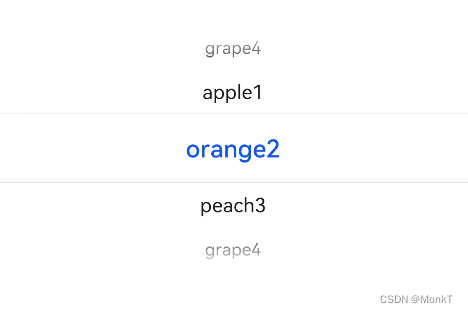
鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之TextPicker组件
鸿蒙(HarmonyOS)项目方舟框架(ArkUI)之TextPicker组件 一、操作环境 操作系统: Windows 10 专业版、IDE:DevEco Studio 3.1、SDK:HarmonyOS 3.1 二、TextPicker组件 TextClock组件通过文本将当前系统时间显示在设备上。支持不…...
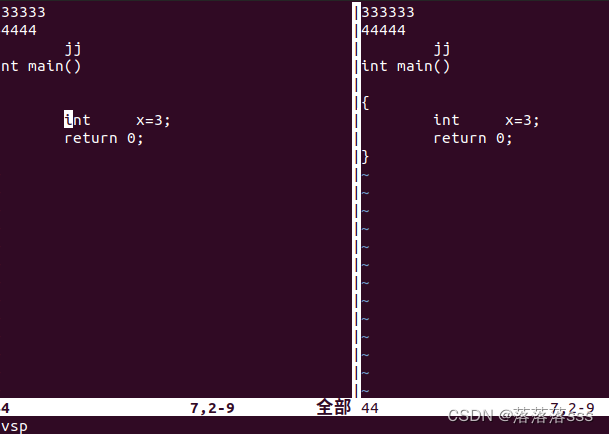
linux中vim的操作
(码字不易,关注一下吧w~~w) 命令模式: 当我们按下esc键时,我们会进入命令模式;当使用vi打开一个文件时也是进入命令模式。 光标移动: 1 保存退出:ZZ 2 代码格式化:ggG 3 光标移动ÿ…...

《统计学习方法:李航》笔记 从原理到实现(基于python)-- 第5章 决策树
文章目录 第5章 决策树5.1 决策树模型与学习5.1.1 决策树模型5.1.2 决策树与if-then规则5.1.3 决策树与条件概率分布5.1.4 决策树学习5.2 特征选择5.2.1 特征选择问题5.2.2 信息增益5.2.3 信息增益比5.3.1 ID3算法5.3.2 C4.5的生成算法5.4 决策树的剪枝5.5 CART算法5.5.1 CART生…...

【C++11(一)】列表初始化and右值引用
一、 统一的列表初始化 1.1 {}初始化 在C98中,标准允许 使用花括号{}对数组或者结构体元素 进行统一的列表初始值设定 C11扩大了用大括号 括起的列表(初始化列表)的使用范围 使其可用于所有的内置类型和 用户自定义的类型 使用初始化列表时…...

为什么SSL会握手失败?SSL握手失败原因及解决方案
随着网络安全技术的发展,SSL证书作为网站数据安全的第一道防线,被越来越多的企业选择。SSL证书使用的是SSL协议,而SSL握手是SSL协议当中最重要的一部分。当部署SSL证书时,如果服务器和客户端之间无法建立安全连接,就会…...

STM32——智能小车
STM32——智能小车 硬件接线 B-1A – PB0 B-1B – PB1 A-1A – PB2 A-1B – PB10 其余接线参考51单片机小车项目。 1.让小车动起来 motor.c #include "motor.h" void goForward(void) {// 左轮HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET);HAL_GPIO…...

开源:基于Vue3.3 + TS + Vant4 + Vite5 + Pinia + ViewPort适配..搭建的H5移动端开发模板
vue3.3-Mobile-template 基于Vue3.3 TS Vant4 Vite5 Pinia ViewPort适配 Sass Axios封装 vconsole调试工具,搭建的H5移动端开发模板,开箱即用的。 环境要求: Node:16.20.1 pnpm:8.14.0 必须装上安装pnpm,没装的看这篇…...
的理论基础)
缩略图保持加密(thumbnail-preserving encryption, TPE)的理论基础
这涉及到一些视觉心理学等方面知识: 1、参考文献: 云存储图像缩略图保持的加密研究进展(中国图像图形学报) 一些视觉心理学的研究为TPE的成功实现提供了理论基础。Potter(1975, 1976)的研究表明人类的视觉系统能够在100 ms内从一个新场景中提取出相应的语义信息;250 ms内…...
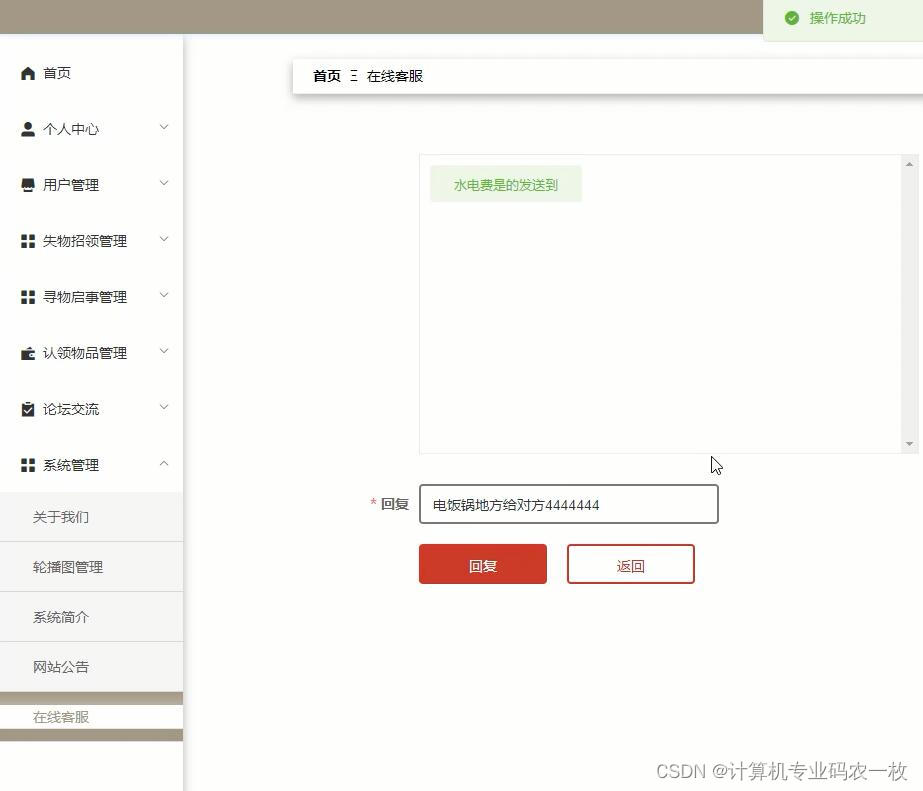
nodejs+vue+mysql校园失物招领网站38tp1
本高校失物招领平台是为了提高用户查阅信息的效率和管理人员管理信息的工作效率,可以快速存储大量数据,还有信息检索功能,这大大的满足了用户和管理员这两者的需求。操作简单易懂,合理分析各个模块的功能,尽可能优化界…...
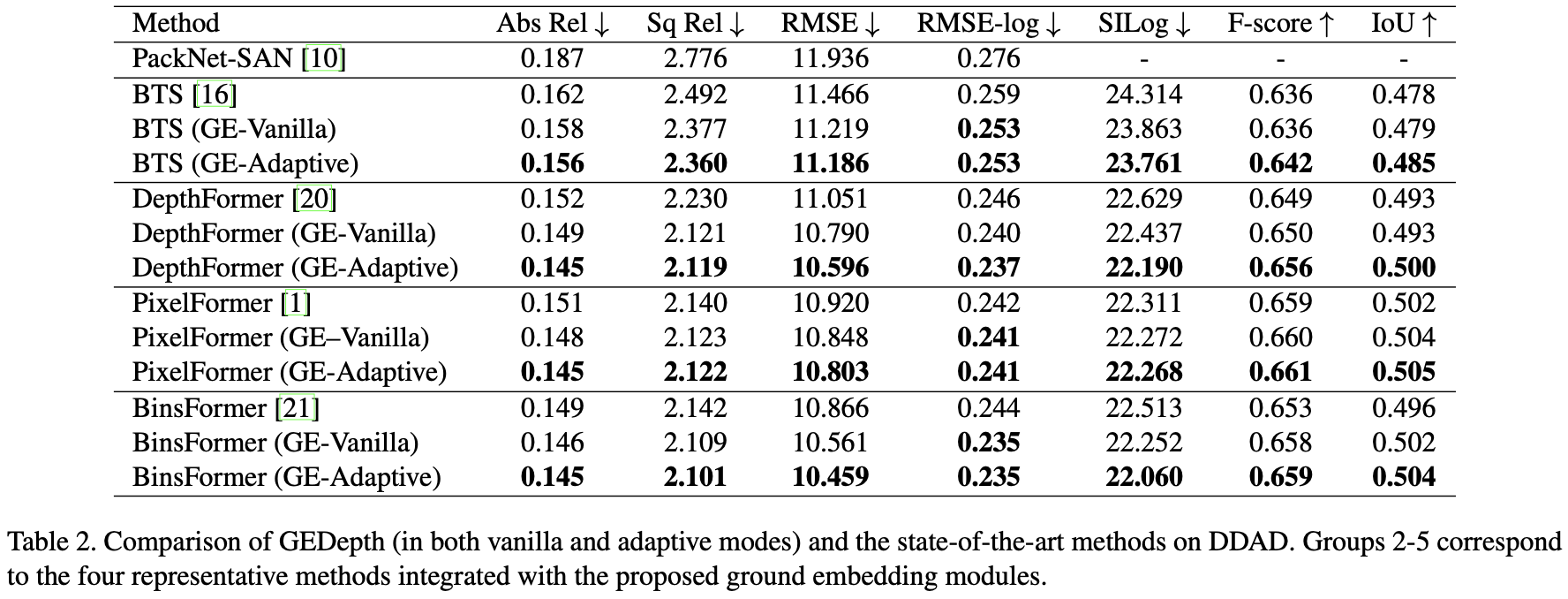
GEDepth:Ground Embedding for Monocular Depth Estimation
参考代码:gedepth 出发点与动机 相机的外参告诉了相机在世界坐标系下的位置信息,那么可以用这个外参构建一个地面基础深度作为先验,后续只需要在这个地面基础深度先验基础上添加offset就可以得到结果深度,这样可以极大简化深度估…...
校园圈子论坛系统--APP小程序H5,前后端源码交付,支持二开!uniAPP+PHP书写!
随着移动互联网的快速发展,校园社交成为了大学生们日常生活中重要的一部分。为了方便校园内学生的交流和互动,校园社交小程序逐渐走入人们的视野。本文将探讨校园社交小程序的开发以及其带来的益处。 校园社交小程序的开发涉及许多技术和设计方面。首先&…...
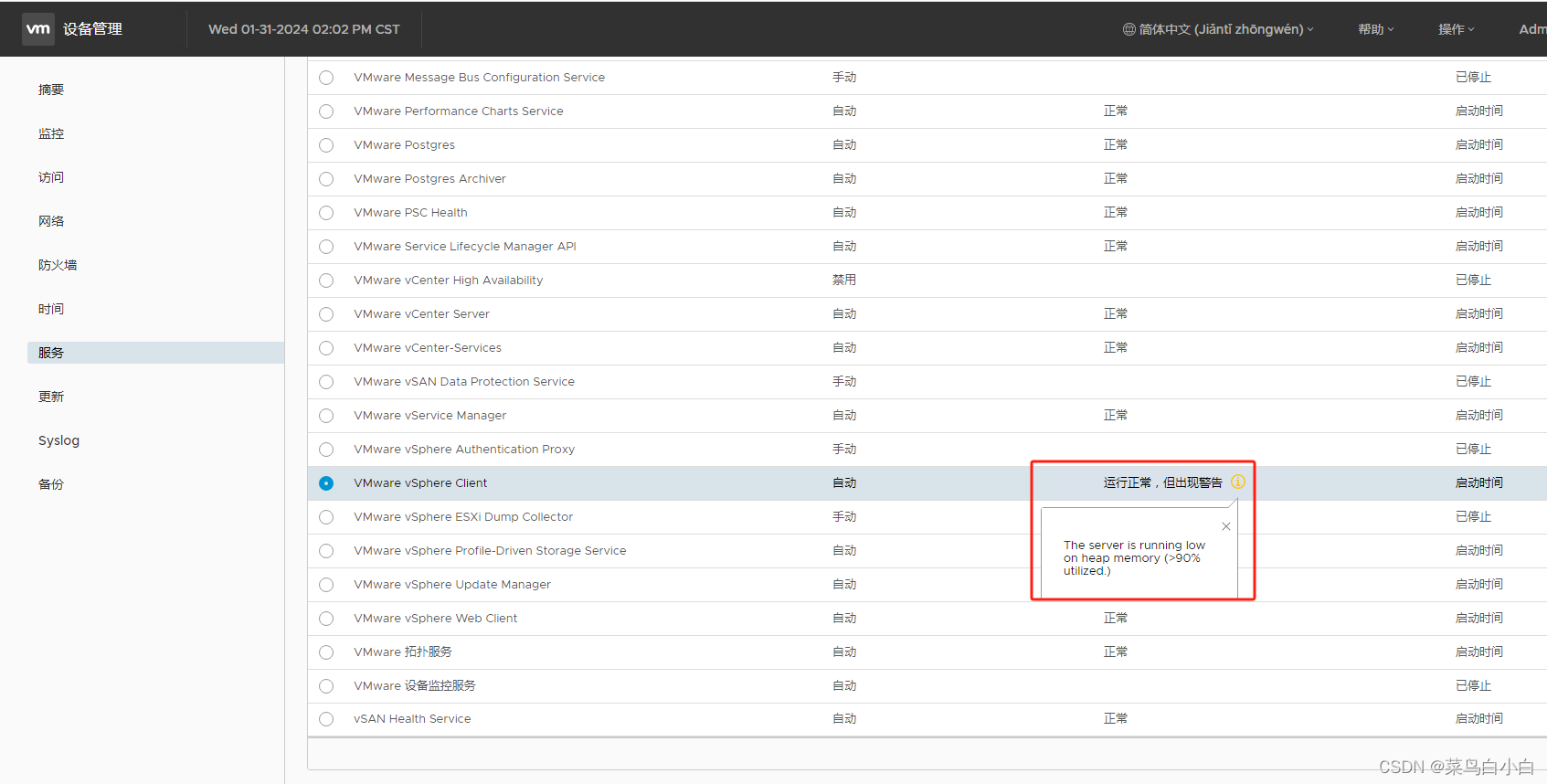
VMware vCenter告警:vSphere UI运行状况警报
vSphere UI运行状况警报 不会详细显示告警的具体内容,需要我们自己进一步确认告警原因。 vSphere UI运行状况警报是一种监控工具,用于检测vSphere环境中的潜在问题。当警报触发时,通常表示系统遇到了影响性能或可用性的问题。解决vSphere UI…...
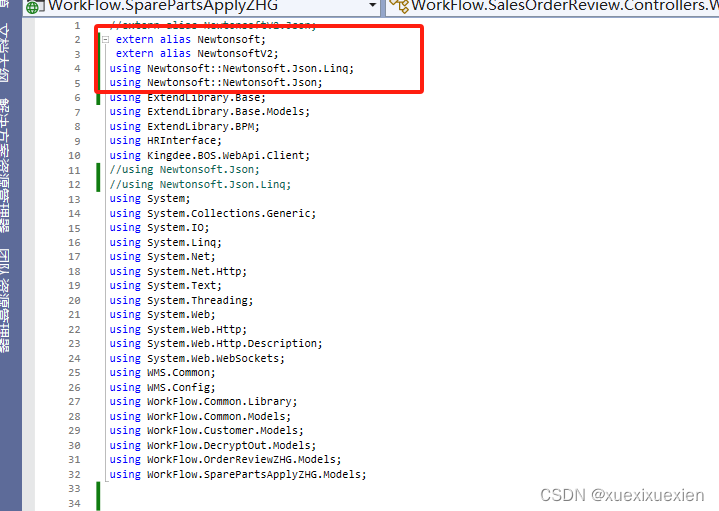
C# 引用同一个dll不同版本的程序集
因为项目需要所以必须在项目中引用不同版本的同一程序集 我要引用的文件是newtonsoft.json.dll 两个版本为12.0.0.0 和4.0.0.0 1.如果已经先引入了newtonsoft.json 12.0.0.0版本的程序集,如果直接引入另一个版本的程序集的话会提示不成功,所以先将另一个…...

单机搭建hadoop环境(包括hdfs、yarn、hive)
单机可以搭建伪分布式hadoop环境,用来测试和开发使用,hadoop包括: hdfs服务器 yarn服务器,yarn的前提是hdfs服务器, 在前面两个的基础上,课可以搭建hive服务器,不过hive不属于hadoop的必须部…...
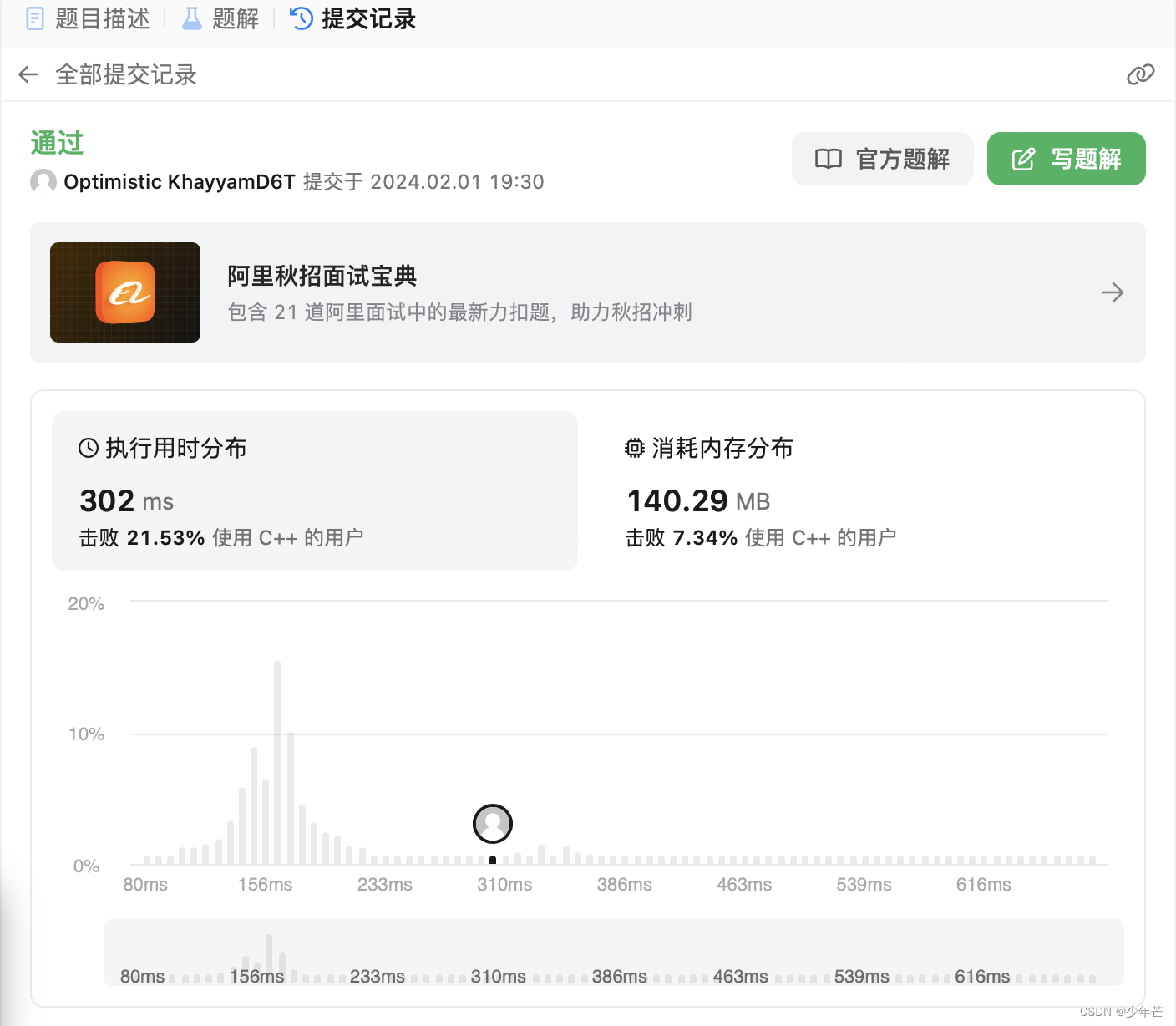
LEETCODE 170. 交易逆序对的总数
class Solution { public:int reversePairs(vector<int>& record) {if(record.size()<1)return 0;//归并 递归int left,right;left0;rightrecord.size()-1;int nummergeSort(left,right,record);return num;}int mergeSort(int left,int right, vector<int>…...

「HarmonyOS」EventHub事件通知详细使用方法
需求背景: 在开发过程中,肯定会出现触发特定事件,需要全局进行通知,与之相关的部分进行执行相应的修改方法。举个例子:修改了用户个人昵称,需要进行全局通知,在涉及昵称的部分收到通知后&#…...

为什么golang不支持可重入锁呢?
为什么golang不需要可重入锁? 在工程中使用锁的原因在于为了保护不变量,也可以用于保护内、外部的不变量。 基于此,Go 在互斥锁设计上会遵守这几个原则。如下: 在调用 mutex.Lock 方法时,要保证这些变量的不变性保持…...

别再折腾环境了!手把手教你用Texlive 2022 + Texstudio 4.4.1 一键搞定西电XDUTS论文模板
西电LaTeX论文写作终极指南:Texlive 2022与Texstudio 4.4.1高效配置方案 每到毕业季,总有一群学生在深夜的实验室里对着报错的LaTeX界面抓狂。去年此时,我也曾是其中一员——连续三天尝试配置西电XDUTS论文模板未果,直到在一位学…...

Apache APISIX Dashboard完全指南:5分钟掌握可视化API网关管理
Apache APISIX Dashboard完全指南:5分钟掌握可视化API网关管理 【免费下载链接】apisix-dashboard Dashboard for Apache APISIX 项目地址: https://gitcode.com/gh_mirrors/ap/apisix-dashboard Apache APISIX Dashboard是Apache APISIX API网关的可视化控制…...

如何用嘎嘎降AI处理汉语言文学论文:文学类毕业论文降AI免费完整操作教程
如何用嘎嘎降AI处理汉语言文学论文:文学类毕业论文降AI免费完整操作教程 帮同学处理过汉语言文学论文降AI教程,流程基本是固定的,记录下来供参考。 主推工具:嘎嘎降AI(www.aigcleaner.com),4.…...

Python开发者快速上手,十分钟完成Taotoken API第一个聊天调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者快速上手,十分钟完成Taotoken API第一个聊天调用 对于希望快速体验不同大语言模型能力的Python开发者来说…...

如何快速上手Excel-DNA:构建专业Excel插件的完整实战指南
如何快速上手Excel-DNA:构建专业Excel插件的完整实战指南 【免费下载链接】ExcelDna Excel-DNA - Free and easy .NET for Excel. This repository contains the core Excel-DNA library. 项目地址: https://gitcode.com/gh_mirrors/ex/ExcelDna Excel-DNA是…...

5分钟快速搭建Windows RTMP流媒体服务器:新手完整指南
5分钟快速搭建Windows RTMP流媒体服务器:新手完整指南 【免费下载链接】nginx-rtmp-win32 Nginx-rtmp-module Windows builds. 项目地址: https://gitcode.com/gh_mirrors/ng/nginx-rtmp-win32 想要在Windows系统上搭建自己的直播服务器吗?nginx…...

3步解锁专业级HDR画质:MPC Video Renderer完全使用指南
3步解锁专业级HDR画质:MPC Video Renderer完全使用指南 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 还在为Windows播放HDR视频效果不佳而烦恼吗?MPC…...

智慧树自动刷课插件:5步实现高效学习自动化,节省70%学习时间
智慧树自动刷课插件:5步实现高效学习自动化,节省70%学习时间 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复性视频学习…...

Perplexity习语查询响应延迟超800ms?3个冷启动配置错误正在 silently 毁掉你的语言生产力
更多请点击: https://kaifayun.com 第一章:Perplexity习语查询功能概览 Perplexity 的习语查询功能专为语言学习者与内容创作者设计,支持对英语中高频、多义、文化负载型习语进行上下文感知的精准解析。该功能不仅返回标准释义,还…...

如何快速实现碧蓝航线全自动托管:智能脚本Alas终极指南
如何快速实现碧蓝航线全自动托管:智能脚本Alas终极指南 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧…...