【三维重建】运动恢复结构(SfM)
运动恢复结构是通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数。
欧式结构恢复(内参已知,外参未知)
欧式结构恢复问题:
已知:1、n个三维点在m张图像中的对应点的像素坐标
2、相机内参
求解:1、n个三维点坐标
2、m个摄像机的外参数R、T
通过极几何我们知道本质矩阵和基础矩阵【三维重建】对极几何-CSDN博客

求得了基础矩阵F,知道相机内参,就能求得本质矩阵E
核心问题就在于如何从E中分离出R、T

仿射结构恢复(相机为仿射相机,内、外参数均未知)
仿射相机指的是在将世界坐标系的点映射到像素坐标系时候,用固定深度代替
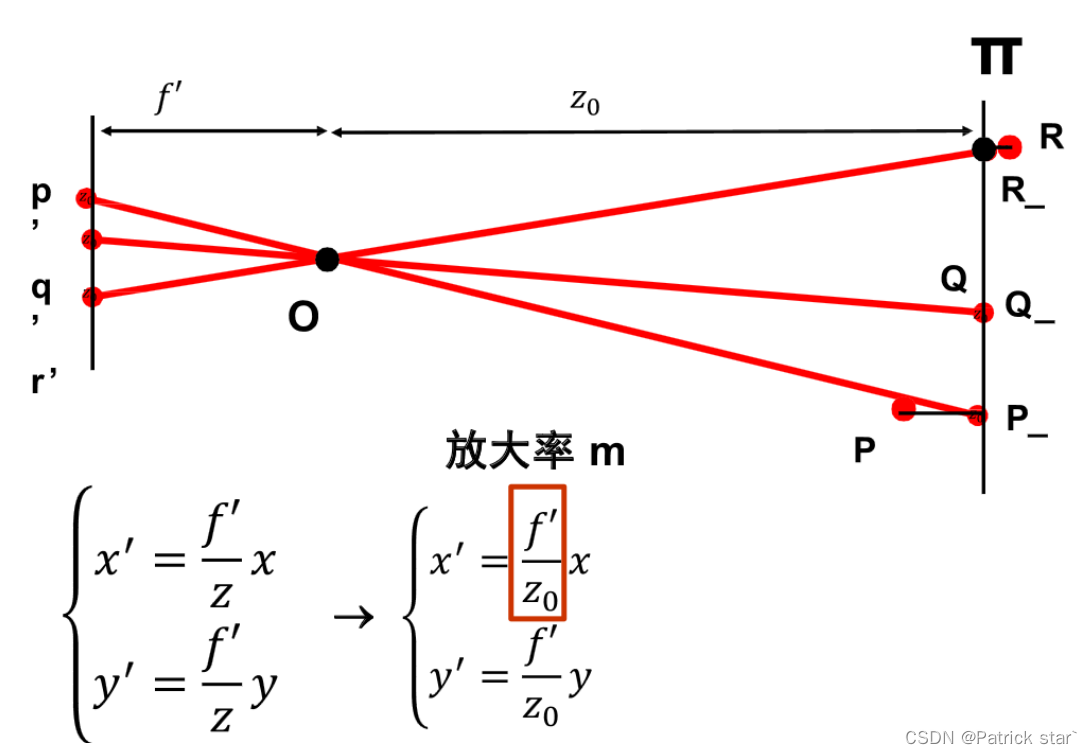
 仿射结构恢复的结果能保证平行性,但是保证不了角度
仿射结构恢复的结果能保证平行性,但是保证不了角度


我们的目标是求解A、b、X
透视结构恢复(相机为透视相机,内参外参未知)
透视结构恢复由于缺少内参,没法求得精确的投影矩阵,和仿射结构恢复一样存在一个无法求解的可逆矩阵H(4x4,15个自由度)。

透视结构所面临的为题比仿射结构更加复杂,假设有m个相机n个点,透视结构恢复需要求11m+3n-15个未知量,并且求得的结果甚至不能保证平行性。


总结一下欧式结构恢复、仿射结构恢复和透视结构恢复各自存在的问题:
欧式结构恢复求解的结果保证不了尺度、方向等信息,只能保证等比例缩放,想要求得真实的大小需要其他先要知识。一般情况下,欧式结构恢复是相机两两组合,会产生累积误差。
仿射结构恢复求解的结果,包含了欧式结构恢复所面临的问题,能保证平行性,但是保证不了角度。仿射结构恢复要求三维点能够被所有相机看到 ,如何有一个相机没有看到,那么这个点就不能用,因此仿射结构恢复求得的三维点比较少。
仿射结构恢复求解的结果,包含了仿射结构恢复所面临的问题,连平行性都保证不了。和欧式结构一样,透视结构恢复也是通过相机两两组合求解,会产生累积误差。
相关文章:
【三维重建】运动恢复结构(SfM)
运动恢复结构是通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数。 欧式结构恢复(内参已知,外参未知) 欧式结构恢复问题: 已知:1、n个三维点在m张图像中的对应点的像素坐标 2、相机内参 求解&…...

Android Studio非UI线程修改控件——定时器软件
目录 一、UI界面设计 1、UI样式 2、XML代码 二、功能编写 1、定义 2、实现方法 3、功能实现 一、UI界面设计 1、UI样式 2、XML代码 <?xml version"1.0" encoding"utf-8"?> <RelativeLayout xmlns:android"http://schemas.android…...

canvas的一些基础
在 Canvas 中,基本图形有两种:直线图形和曲线图形 直线图形:直线、矩形(描边矩形和填充矩形)、多边形 曲线图形:曲线和弧线(弧线是圆的一部分,曲线则不一定,弧线上的每个点都具有相同的曲率&…...
C++(10)——类与对象(最终篇)
目录 static成员 概念 特性 友元 友元函数 友元类 内部类 匿名对象 经过这么多天的分享,C的类与对象终于要结束了。结束也意味着C快要入门了。 static成员 概念 声明为static的类成员称为类的静态成员,用static修饰的成员变量,称之…...

NetApp FAS2750 和 FAS2820 简化分布式企业的存储
拥有分布式企业和多个办公位置的客户希望使用这些系统进行虚拟化,以及为大型 FAS 和 AFF 系统提供简单且经济高效的备份和灾难恢复。 NetApp FAS2750 的规格 非常适合需要轻松部署和简化运维的中小型企业。 • 每个 HA 对的最大原始容量:1.2 PB • 每个…...
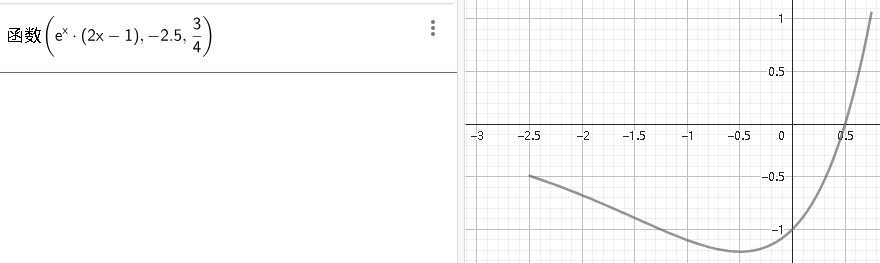
Geogebra设置函数定义域
曲线方程设置范围 y 4x 0 / (-4 < y < 4) 函数设置范围 函数(e^x*(2x-1),-2.5,3/4)...
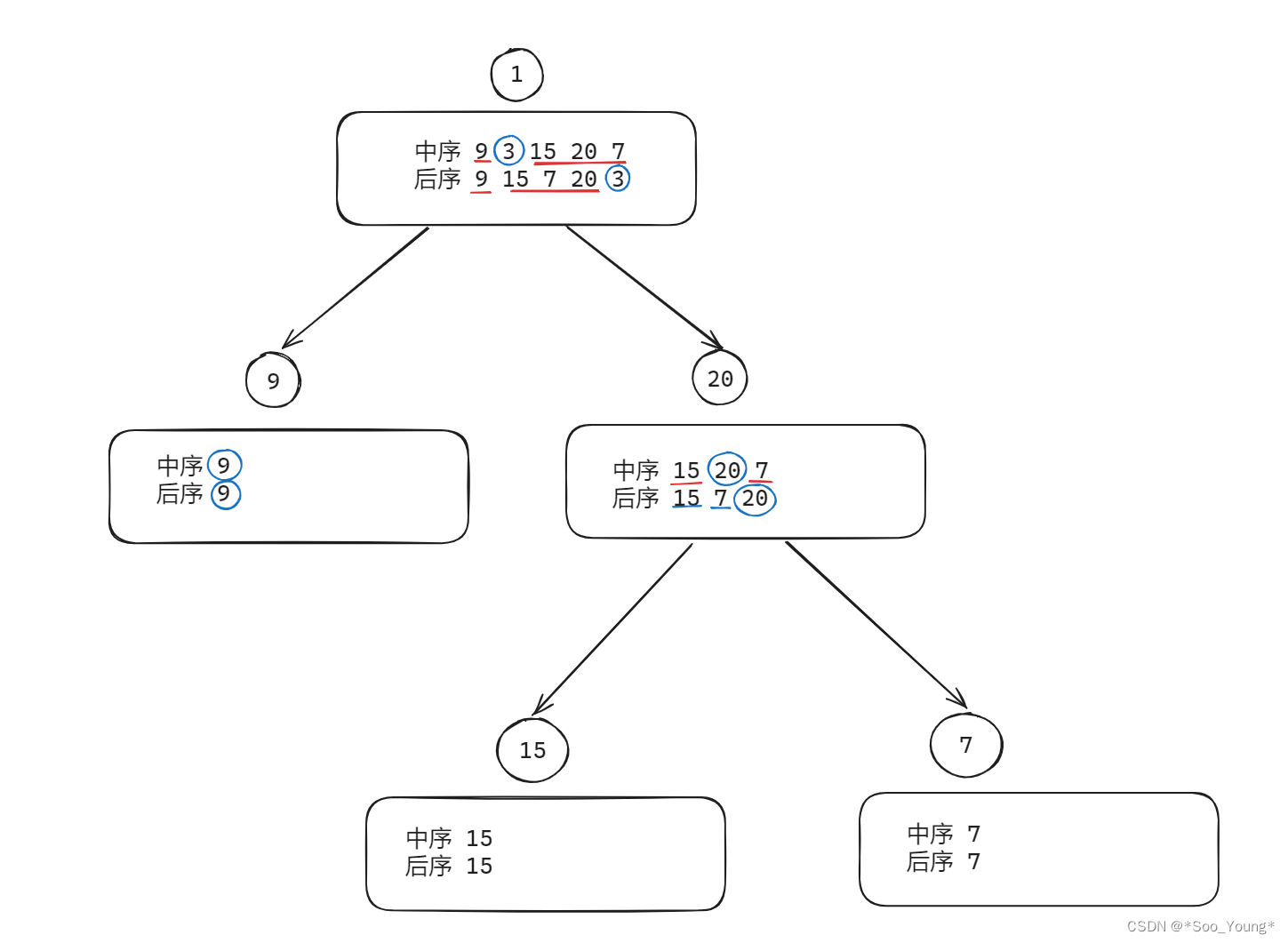
代码随想录刷题笔记 DAY 18 | 找树左下角的值 No.513 | 路经总和 No.112 | 从中序与后序遍历序列构造二叉树 No.106
Day 18 01. 找树左下角的值(No. 513) 题目链接 代码随想录题解 1.1 题目 给定一个二叉树的 根节点 root,请找出该二叉树的 最底层 最左边 节点的值。 假设二叉树中至少有一个节点。 示例 1: 输入: root [2,1,3] 输出: 1 示例 2: 输入…...
【algorithm】一个简单的PID工程 base 用于手生时候快速复习 用于设计模式 cpp语法八股 快速复习校验
写在前面 最近项目一直用matlab,防止手生整一个回忆工具使用的简单的pid demo,走一边流程,包括配工程debug看结果,复用之前记录的配置见我的bloghttps://blog.csdn.net/weixin_46479223/article/details/135082867?csdn_share_t…...

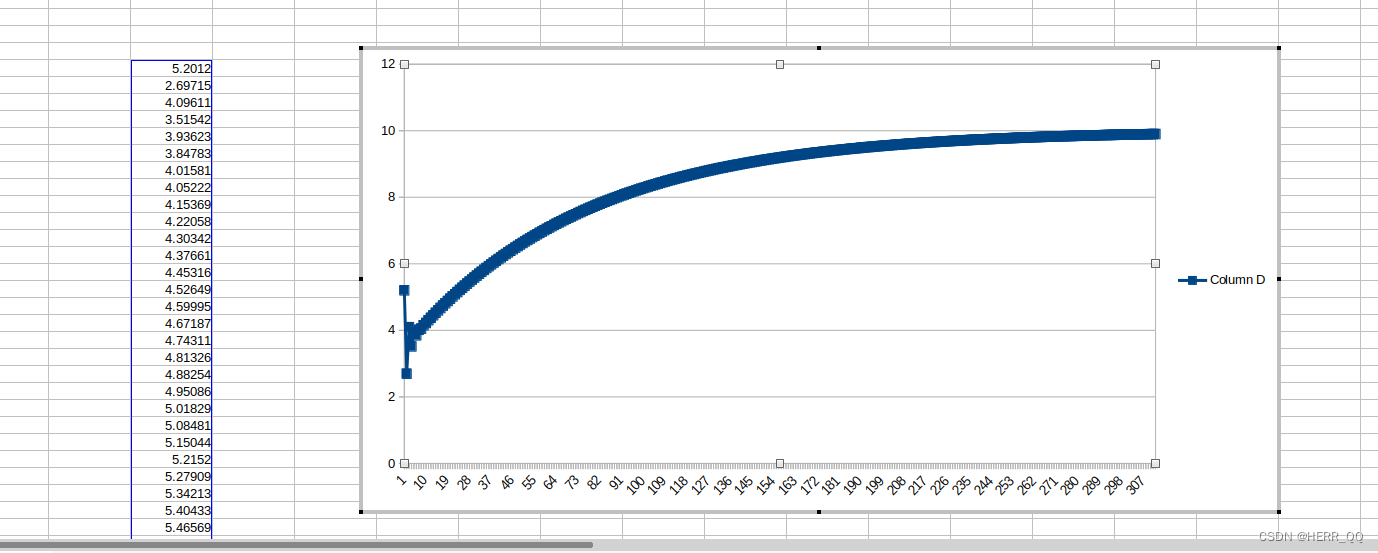
Python处理图片生成天际线(2024.1.29)
1、天际线简介 天际线(SkyLine)顾名思义就是天空与地面的边界线,人站在不同的高度,会看到不同的景色和地平线,天空与地面建筑物分离的标记线,不得不说,每天抬头仰望天空,相信大家都可…...

jsp服装穿搭推荐系统Myeclipse开发mysql数据库web结构java编程计算机网页项目
一、源码特点 JSP 游戏网上商城系统是一套完善的java web信息管理系统,对理解JSP java编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为 TOMCAT7.0,Myeclipse8.5开发,数据库为Mysql5.0…...
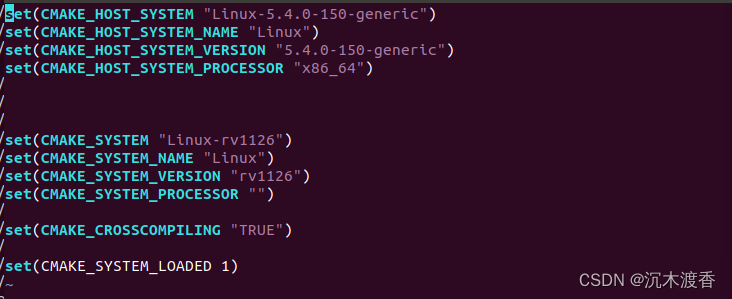
Opencv(C++)学习 之RV1126平台的OPENCV交叉编译
本文特点:网上已经有了很多opencv移植RV1106的文章,本文主要记录基于cmake-gui编译,碰到的报错,及解决报错问题的方法,同时简单总结一些配置项相关的知识。 一、环境: ubuntu18 x64 RV1126交叉编译工具链 …...

http和https区别
HTTP协议以明文方式发送内容,不提供任何方式的数据加密。HTTP协议不适合传输一些敏感信息,比如:信用卡号、密码等支付信息。https则是具有安全性的ssl加密传输协议。http和https使用的是完全不同的连接方式,用的端口也不一样&…...
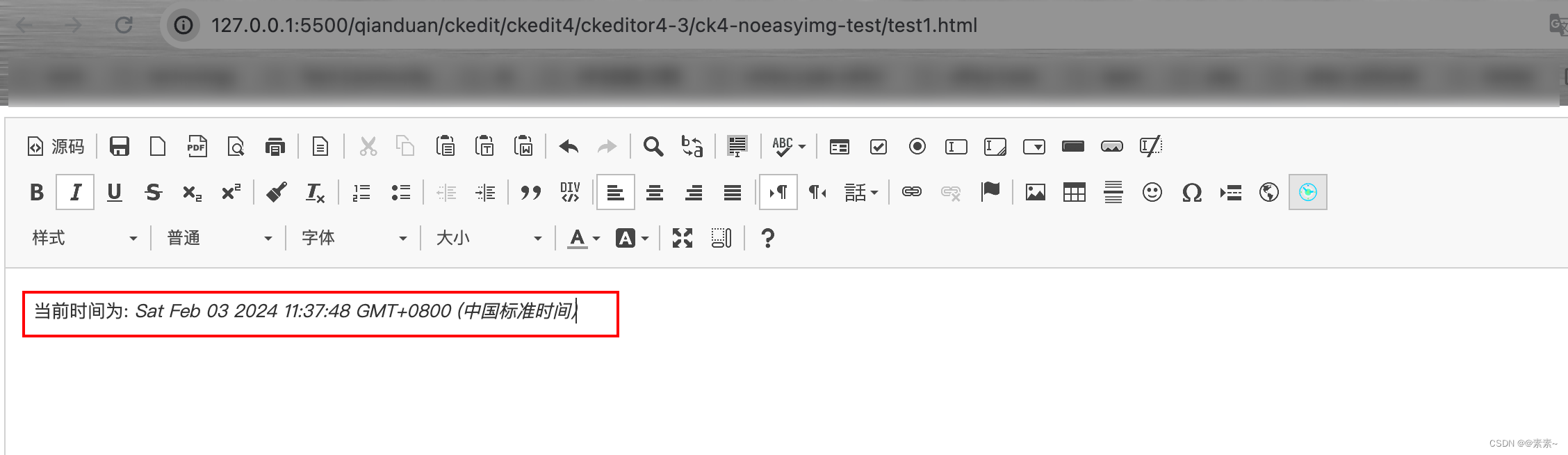
富文本编辑器CKEditor4简单使用-05(开发自定义插件入门)
富文本编辑器CKEditor4简单使用-05(开发自定义插件入门) 1. CKEditor4插件入门1.1 关于CKEditor4插件的简单安装与使用1.2 参考 2. 开发自定义插件——当前时间插件2.1 创建插件文件目录结构2.2 编写插件原代码2.2.1 编写代码框架2.2.2 创建编辑器命令2.…...

chisel之scala 语法
Chisel新手教程之Scala语言(1) Value & variable Value是immutable的,当它被分配一个数据后,无法进行重新分配。用 val 表示。 Variable是mutable的,可以重复赋值。用 var 表示。示例如下: val a …...
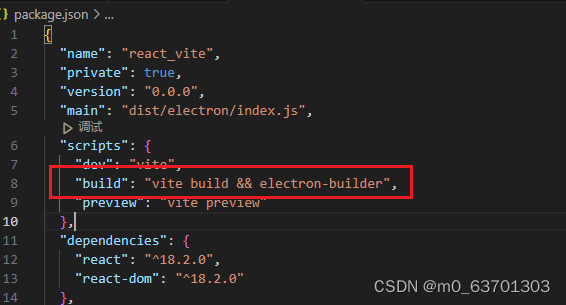
React18构建Vite+Electron项目以及打包
一.先创建项目 cnpm create vite 选择React > JavaScript >cd react_vite > cnpm i >npm run dev 二.安装Electron依赖 指定版本相对稳定 cnpm i electron19.0.10 -D cnpm i vite-plugin-electron0.9.3 -D cnpm i electron-builder23.0.1 -D三.创建electron目录…...

Spark性能调优
Spark性能调优 executor内存不足用UNION ALL代替UNIONpersist与耗时监控用OR替换UNION ALL用JOIN替换IN executor内存不足 问题表现1:Container xx is running beyond physical memory limits. Current usage: xxx GB of x GB physical memory used; xx GB of x GB…...

flutter开发实战-Camera自定义相机拍照功能实现
flutter开发实战-Camera自定义相机拍照功能实现 一、前言 在项目中使用image_picker插件时候,在android设备上使用无法默认设置前置摄像头(暂时不清楚什么原因),由于项目默认需要使用前置摄像头,所以最终采用自定义…...

LeetCode15. 三数之和
15. 三数之和 给你一个整数数组 nums ,判断是否存在三元组 [nums[i], nums[j], nums[k]] 满足 i ! j、i ! k 且 j ! k ,同时还满足 nums[i] nums[j] nums[k] 0 。请 你返回所有和为 0 且不重复的三元组。 **注意:**答案中不可以包含重复…...
Docker搭建MySQL8主从复制
之前文章我们了解了面试官:说一说Binlog是怎么实现的,这里我们用Docker搭建主从复制环境。 docker安装主从MySQL 这里我们使用MySQL8.0.32版本: 主库配置 master.cnf //基础配置 [client] port3306 socket/var/run/mysqld/mysql.sock [m…...

【前端】日期转换
记录项目中需要处理的日期格式 默认vue2 初级版 将后端传来的数组 [2024/01/29 08:55:18, 2024/01/29 09:55:18, 2024/01/29 10:11:18]转为 [2024-01-29 08:55, 2024-01-29 09:55, 2024-01-29 10:11]方法 convertDateTimeFormat(arr) {var tempArr arr.map(function (dateT…...

Chrono 自然语言日期解析器:从文本到标准日期的完整指南
Chrono 自然语言日期解析器:从文本到标准日期的完整指南 【免费下载链接】chrono A natural language date parser in Javascript 项目地址: https://gitcode.com/gh_mirrors/ch/chrono Chrono 是一款强大的 JavaScript 自然语言日期解析器,能够将…...

你的SSH密钥可能已经过期了队
引言 在现代软件开发中,性能始终是衡量应用质量的重要指标之一。无论是企业级应用、云服务还是桌面程序,性能优化都能显著提升用户体验、降低基础设施成本并增强系统的可扩展性。对于使用 C# 开发的应用程序而言,性能优化涉及多个层面&#x…...

STM32 RTC掉电也能走时?手把手教你用VBAT和LSE晶振搭建硬件时钟电路
STM32 RTC掉电也能走时?手把手教你用VBAT和LSE晶振搭建硬件时钟电路 嵌入式系统中实时时钟(RTC)的重要性不言而喻,它不仅是记录时间的工具,更是许多关键功能的基石。想象一下,当你的智能门锁因为断电而无法…...

OpenClaw隐私保护:千问3.5-9B本地化处理敏感数据方案
OpenClaw隐私保护:千问3.5-9B本地化处理敏感数据方案 1. 为什么我们需要本地化AI处理 去年处理一份投资协议时,我犯了个致命错误——将包含客户隐私条款的合同上传到某云端AI工具进行摘要生成。三天后,法务团队在公开搜索引擎的缓存记录中发…...

VMware Workstation 16 中 Windows Server 2019 数据中心版安装与优化指南
1. VMware Workstation 16 环境准备 在开始安装 Windows Server 2019 数据中心版之前,我们需要先准备好 VMware Workstation 16 的环境。我建议大家在安装前检查下自己的电脑配置,毕竟跑虚拟机还是挺吃资源的。我的经验是,至少要有 16GB 内存…...

FasterRCNN训练完别急着关!用predict.py批量预测并保存结果的完整配置指南
FasterRCNN模型预测实战:从批量推理到结果保存的全流程解析 当你终于完成FasterRCNN模型漫长的训练过程,看着损失曲线平稳下降,验证集指标达到预期,那种成就感不言而喻。但很多开发者在这里犯了一个常见错误——直接关闭项目转向下…...

地热发电设备监控的终极指南:使用OSHI实现可再生能源硬件监控
地热发电设备监控的终极指南:使用OSHI实现可再生能源硬件监控 【免费下载链接】oshi Native Operating System and Hardware Information 项目地址: https://gitcode.com/gh_mirrors/os/oshi OSHI(Native Operating System and Hardware Informat…...

【.NET 9低代码开发终极指南】:20年微软生态专家亲授——零前端经验如何3天交付生产级业务应用?
第一章:.NET 9低代码开发全景认知与核心价值定位.NET 9 将低代码能力深度融入平台原生架构,不再依赖第三方插件或独立运行时,而是通过统一的组件模型、声明式 UI 编程范式与智能元数据驱动机制,实现“写少做多”的开发体验。其核心…...

Sketch MeaXure终极指南:如何快速生成专业设计规范
Sketch MeaXure终极指南:如何快速生成专业设计规范 【免费下载链接】sketch-meaxure 项目地址: https://gitcode.com/gh_mirrors/sk/sketch-meaxure 你是否经历过这样的场景?精心设计完界面后,开发团队却反复询问"这个间距是多少…...

TI F28P65X开发板实战:CPU Timer精准定时与LED控制
1. 从零开始玩转F28P65X定时器 第一次接触TI的F28P65X开发板时,我被它强大的定时器功能惊艳到了。这块芯片内置的CPU Timer精度可以达到微秒级,对于需要精确时间控制的场景简直是神器。就拿最简单的LED闪烁来说,传统延时函数控制闪烁间隔总会…...