PyTorch深度学习实战(23)——从零开始实现SSD目标检测
PyTorch深度学习实战(23)——从零开始实现SSD目标检测
- 0. 前言
- 1. SSD 目标检测模型
- 1.1 SSD 网络架构
- 1.2 利用不同网络层执行边界框和类别预测
- 1.3 不同网络层中默认框的尺寸和宽高比
- 1.4 数据准备
- 1.5 模型训练
- 2. 实现 SSD 目标检测
- 2.1 SSD300 架构
- 2.2 MultiBoxLoss
- 2. 训练 SSD
- 小结
- 系列链接
0. 前言
SSD (Single Shot MultiBox Detector) 是一种基于单次前向传递的实时目标检测算法,它在速度和准确性之间取得了很好的平衡。与传统的两阶段目标检测算法(如 Faster R-CNN )不同,SSD 直接在图像的多个尺度上进行预测,无需候选框生成和筛选。SSD 的核心思想是在卷积神经网络的不同层级上设置多个特征图用于预测目标。这些特征图在空间上具有不同的尺度,可以检测不同大小的目标。每个特征图上的每个位置都预测一组边界框和对应的类别概率。在本节中,将介绍 SSD 的工作原理,然后在自定义数据集上训练 SSD 目标检测模型。
1. SSD 目标检测模型
在 R-CNN 和 YOLO 目标检测模型中,通过数次应用卷积和池化预测目标对象类别和边界框。同时,我们也知道不同的网络层对原始图像具有不同的感受野,初始层相对于最终层具有较小的感受野。在本节中,我们将学习 SSD 如何利用这一现象来预测图像中目标对象的边界框。
SSD (Single Shot Multibox Detector) 使用了多层感受野的特性来解决多尺度目标检测问题,检测图像中不同尺度的目标对象,具体来说:
- 使用额外的网络层扩展预训练的
VGG网络,直到获得1 x 1的输出 - 与仅使用最终层进行边界框和类别预测不同,
SSD利用这些添加的卷积层和池化层检测大小不同的物体 SSD使用特定比例和纵横比的默认框来代替锚框,并将这些框与不同特征图中的不同尺寸的目标相对应- 与
YOLO使用锚框预测类别和偏移量一样,SSD通过对每个默认框进行类别和偏移量预测来输出目标检测结果
总体而言,SSD 与 YOLO 的主要区别包括:SSD 中使用默认框 (default box) 替换了 YOLO 中的锚框 (anchor box),并且 SSD 中使用多层特征图执行预测,而 YOLO 中使用最终特征层。
1.1 SSD 网络架构
SSD 的网络架构如下:

如上图中所示,将一张尺寸为 300 x 300 x 3 的图像输入到预训练的 VGG-16 网络获得 conv5_3 层的输出,然后,通过在 conv5_3 后追加更多卷积层来扩展网络。
1.2 利用不同网络层执行边界框和类别预测
接下来,针对每个单元格和每个默认框获取边界框偏移量和类别预测。conv5_3 输出的预测总数为 38 x 38 x 4,其中 38 x 38 是 conv5_3 层的输出形状,4 是在 conv5_3 层上的默认框数量。以此类推,整个网络的参数总数如下:
| 层 | 权重数 |
|---|---|
| conv5_3 | 38 x 38 x 4 = 5776 |
| FC6 | 19 x 19 x 6 = 2166 |
| conv8_2 | 10 x 10 x 6 = 600 |
| conv9_2 | 5 x 5 x 6 = 150 |
| conv10_2 | 3 x 3 x 4 = 36 |
| conv11_2 | 1 x 1 x 4 = 4 |
| 总计 | 8732 |
可以看到,每个网络层中特征图网格单元上使用的默认框数量并不相同。
1.3 不同网络层中默认框的尺寸和宽高比
本节中,我们学习如何确定默认框的尺寸和宽高比,首先计算默认框尺寸。假设目标对象最小尺寸为图像高度的 20%、宽度的 20%,最大尺寸为高度的 90%、宽度的 90%。在这种情况下,随着网络层的逐渐增加,图像大小会显著缩小:

图像缩放的公式如下:
l e v e l i n d e x : l = 1 , . . . , L s c a l e o f b o x e s : s l = s m i n + s m a x − s m i n L − 1 ( l − 1 ) level\ index:l=1,...,L \\ scale\ of\ boxes:s_l=s_{min}+\frac{s_{max}-s_{min}}{L-1}(l-1) level index:l=1,...,Lscale of boxes:sl=smin+L−1smax−smin(l−1)
了解了如何计算默认框在不同网络层的尺寸后,我们继续学习如何确定默认框的宽高比,常用的宽高比如下:
a s p e c t r a t i o : r ∈ 1 , 2 , 3 , 1 / 2 , 1 / 3 aspect\ ratio:r∈{1,2,3,1/2,1/3} aspect ratio:r∈1,2,3,1/2,1/3
不同网络层的默认框框的中心坐标如下:
c e n t e r l o c a t i o n : ( x l i , y l i ) = ( i + 0.5 m , j + 0.5 n ) center\ location:(x_l^i,y_l^i)=(\frac {i+0.5}{m},\frac{j+0.5}{n}) center location:(xli,yli)=(mi+0.5,nj+0.5)
其中,使用 i i i 和 j j j 表示第 l l l 层中的一个单元。
不同宽高比对应的宽高计算如下:
w i d t h : w l r = s l r h e i g h t : h l r = s l r width:w_l^r=s_l\sqrt r\\ height:h_l^r=s_l\sqrt r width:wlr=slrheight:hlr=slr
需要注意的是,我们在不同网络层使用了不同数量的默认框( 4 个或 6 个),如果想要使用 4 个默认框,删除纵横比 {3,1/3},否则使用 6 个默认框,结合不同层及其特征图的比例和长宽比来检测各种尺寸的对象,第 6 个默认框的纵横比计算方式如下:
a d d i t i o n a l s c a l e : s l ′ = s l s l + 1 w h e n r = 1 additional\ scale:s_l'=\sqrt{s_ls_l+1}\ \ \ \ when\ r=1 additional scale:sl′=slsl+1 when r=1
获得了所有可能的默认框后,我们继续学习如何准备训练数据集。
1.4 数据准备
交并比 (Intersection over Union, IoU) 大于指定阈值(例如 0.5 ) 的默认框被视为正匹配,其余为负匹配。在 SSD 的输出中,我们预测默认框属于某个类别(其中第 0 个类别表示背景)的概率,以及默认框相对于真实边界框的偏移量。
最后,我们通过优化分类和定位损失值来训练模型。
1.5 模型训练
分类损失:
L c l s = − ∑ i ∈ p o s l i j k l o g ( c ^ i k ) − ∑ i ∈ n e g l o g ( c ^ i 0 ) , w h e r e c ^ i k = s o f t m a x ( c i k ) L_{cls}=-\sum_{i∈pos}l_{ij}^klog(\hat c_i^k)-\sum_{i∈neg}log(\hat c_i^0),\ where\ \hat c_i^k\ =\ softmax(c_i^k) Lcls=−i∈pos∑lijklog(c^ik)−i∈neg∑log(c^i0), where c^ik = softmax(cik)
其中,pos 表示与真实边界框高度重叠的默认框,而 neg 表示被错误分类的默认框(模型预测这些默认框中包含某个类别但实际上没有包含目标对象)。最后,需要确保 pos : neg 比率最多为 1:3,否则会因为背景类别默认框过多导致预测偏差。
定位损失:对于定位,仅在目标对象得分大于某个阈值时才计算损失值,定位损失计算如下:
L l o c = ∑ i , j ∑ m ∈ { x , y , w , h } 1 i j m a t c h L 1 s m o o t h ( d m i − t m j ) 2 L 1 s m o o t h ( x ) = { 0.5 x 2 i f ∣ x ∣ < 1 ∣ x ∣ − 0.5 o t h e r w i s e t x j = g x i − p x i p w i t y j = g y i − p y i p h i t w j = l o g g w i p w i t h j = l o g g h i p h i L_{loc}=\sum_{i,j}\sum_{m∈\{x,y,w,h\}}1_{ij}^{match}L_1^{smooth}(d_m^i-t_m^j)^2\\ L_1^{smooth}(x)=\left\{ \begin{array}{rcl} 0.5x^2 & & {if\ |x|<1}\\ |x|-0.5 & & {otherwise} \end{array} \right.\\ t_x^j=\frac {g_x^i-p_x^i}{p_w^i}\\ t_y^j=\frac {g_y^i-p_y^i}{p_h^i}\\ t_w^j=log\frac {g_w^i}{p_w^i}\\ t_h^j=log\frac {g_h^i}{p_h^i} Lloc=i,j∑m∈{x,y,w,h}∑1ijmatchL1smooth(dmi−tmj)2L1smooth(x)={0.5x2∣x∣−0.5if ∣x∣<1otherwisetxj=pwigxi−pxityj=phigyi−pyitwj=logpwigwithj=logphighi
其中, t t t 是预测的偏移量, d d d 是实际的偏移量。了解了如何训练 SSD 后,在下一节中,我们将使用 PyTorch 从零开始实现 SSD 模型用于公共汽车与卡车目标检测任务。
2. 实现 SSD 目标检测
2.1 SSD300 架构
SSD300 模型架构包含三个子模块:
class SSD300(nn.Module):...def __init__(self, n_classes, device):...self.base = VGGBase()self.aux_convs = AuxiliaryConvolutions()self.pred_convs = PredictionConvolutions(n_classes)...
首先将图片输入到 VGGBase 主干网络,返回两个维度为 (N, 512, 38, 38) 和 (N, 1024, 19, 19) 的特征向量。第二个输出将作为 AuxiliaryConvolutions 的输入,并返回维度为 (N, 512, 10, 10)、(N, 256, 5, 5)、(N, 256, 3, 3) 和 (N, 256, 1, 1) 的输出特征图。最后,将 VGGBase 的第一个输出和 AuxiliaryConvolutions 的四个输出特征图输入到 PredictionConvolutions,返回 8,732 个默认框。
SSD300 类的另一个关键是 create_prior_boxes 方法。对于每个特征图,都有三个与之相关的参数:网格大小、网格单元的比例(特征图的基本默认框)以及单元格中所有默认框的宽高比。使用这三个配置,代码使用三重 for 循环创建一个包含 8732 个默认框 (cx, cy, w, h) 的列表。
最后,detect_objects 方法将预测的默认框分类和回归结果的张量转换为实际的边界框坐标。
2.2 MultiBoxLoss
对于人类而言,我们只需关注少数几个边界框。但是对于 SSD 而言,需要比较来自多个特征图的 8,732 个边界框,并预测默认框是否包含有价值的信息,使用 MultiBoxLoss 计算模型损失。前向传播方法 forward 的输入是模型的默认框预测和真实边界框。
首先,通过将模型中的每个默认框与边界框进行比较,将真实边界框转换为一个包含 8732 个默认框的列表。如果 IoU 足够高,那么特定的默认框将具有非零的回归坐标,并将对象类别作为分类的真实值。然后,计算分类置信度和定位损失,并返回这些损失的总和作为前向传播的输出。大多数默认框会被归类为背景类别,因为它们与真实边界框的 IoU 非常小(甚至在大多数情况下为零)。
一旦将真实值转换为包含 8,732 个默认框的回归和分类张量,就可以将它们与模型的预测进行比较。对回归张量执行 MSE-Loss,对定位张量执行 CrossEntropy-Loss,并将它们加起来作为最终损失返回。
2. 训练 SSD
在本节中,我们将使用 PyTorch 实现 SSD 模型来检测图像中目标对象的边界框,继续使用与 R-CNN 一节中相同的数据集。
(1) 加载图像数据集及所需库:
from torchvision.ops import nms
import torch
import numpy as np
from torch.utils.data import DataLoader, Dataset
from glob import glob
from matplotlib import pyplot as plt
import pandas as pd
import matplotlib.patches as mpatches
from PIL import Image
from torchvision import transformsdevice = 'cuda' if torch.cuda.is_available() else 'cpu'DATA_ROOT = 'open-images-bus-trucks/'
IMAGE_ROOT = f'{DATA_ROOT}/images'
DF_RAW = df = pd.read_csv('open-images-bus-trucks/df.csv')
print(DF_RAW.head())df = df[df['ImageID'].isin(df['ImageID'].unique().tolist())]
label2target = {l:t+1 for t,l in enumerate(DF_RAW['LabelName'].unique())}
label2target['background'] = 0
target2label = {t:l for l,t in label2target.items()}
background_class = label2target['background']
num_classes = len(label2target)
(2) 预处理数据:
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225]
)
denormalize = transforms.Normalize(mean=[-0.485/0.229, -0.456/0.224, -0.406/0.255],std=[1/0.229, 1/0.224, 1/0.255]
)
def preprocess_image(img):img = torch.tensor(img).permute(2,0,1)img = normalize(img)return img.to(device).float()def find(item, original_list):results = []for o_i in original_list:if item in o_i:results.append(o_i)if len(results) == 1:return results[0]else:return results
(3) 定义数据集类:
class OpenDataset(torch.utils.data.Dataset):w, h = 300, 300def __init__(self, df, image_dir=IMAGE_ROOT):self.image_dir = image_dirself.files = glob(self.image_dir+'/*')self.df = dfself.image_infos = df.ImageID.unique()def __getitem__(self, ix):# load images and masksimage_id = self.image_infos[ix]img_path = find(image_id, self.files)img = Image.open(img_path).convert("RGB")img = np.array(img.resize((self.w, self.h), resample=Image.BILINEAR))/255.data = df[df['ImageID'] == image_id]labels = data['LabelName'].values.tolist()data = data[['XMin','YMin','XMax','YMax']].valuesdata[:,[0,2]] *= self.wdata[:,[1,3]] *= self.hboxes = data.astype(np.uint32).tolist() # convert to absolute coordinatesreturn img, boxes, labelsdef collate_fn(self, batch):images, boxes, labels = [], [], []for item in batch:img, image_boxes, image_labels = itemimg = preprocess_image(img)[None]images.append(img)boxes.append(torch.tensor(image_boxes).float().to(device)/300.)labels.append(torch.tensor([label2target[c] for c in image_labels]).long().to(device))images = torch.cat(images).to(device)return images, boxes, labelsdef __len__(self):return len(self.image_infos)
(4) 准备训练和测试数据集以及数据加载器:
from sklearn.model_selection import train_test_split
trn_ids, val_ids = train_test_split(df.ImageID.unique(), test_size=0.1, random_state=99)
trn_df, val_df = df[df['ImageID'].isin(trn_ids)], df[df['ImageID'].isin(val_ids)]
len(trn_df), len(val_df)train_ds = OpenDataset(trn_df)
test_ds = OpenDataset(val_df)train_loader = DataLoader(train_ds, batch_size=4, collate_fn=train_ds.collate_fn, drop_last=True)
test_loader = DataLoader(test_ds, batch_size=4, collate_fn=test_ds.collate_fn, drop_last=True)
(5) 定义函数在批数据训练模型并计算验证数据的准确率和损失值:
def train_batch(inputs, model, criterion, optimizer):model.train()N = len(train_loader)images, boxes, labels = inputs_regr, _clss = model(images)loss = criterion(_regr, _clss, boxes, labels)optimizer.zero_grad()loss.backward()optimizer.step()return loss@torch.no_grad()
def validate_batch(inputs, model, criterion):model.eval()images, boxes, labels = inputs_regr, _clss = model(images)loss = criterion(_regr, _clss, boxes, labels)return loss
(6) 初始化模型(模型文件参考 ssd-utils)、优化器和损失函数:
from model import SSD300, MultiBoxLoss
from detect import *model = SSD300(num_classes, device)
optimizer = torch.optim.AdamW(model.parameters(), lr=1e-4, weight_decay=1e-5)
criterion = MultiBoxLoss(priors_cxcy=model.priors_cxcy, device=device)
(7) 训练 SSD 模型:
train_loss_epochs = []
val_loss_epochs = []for epoch in range(n_epochs):_n = len(train_loader)trn_loss = []val_loss = []for ix, inputs in enumerate(train_loader):loss = train_batch(inputs, model, criterion, optimizer)pos = (epoch + (ix+1)/_n)trn_loss.append(loss.item())train_loss_epochs.append(np.average(trn_loss))_n = len(test_loader)for ix,inputs in enumerate(test_loader):loss = validate_batch(inputs, model, criterion)pos = (epoch + (ix+1)/_n)val_loss.append(loss.item())
val_loss_epochs.append(np.average(val_loss))epochs = np.arange(n_epochs)+1
plt.plot(epochs, train_loss_epochs, 'bo', label='Training loss')
plt.plot(epochs, val_loss_epochs, 'r', label='Test loss')
plt.title('Training and Test loss over increasing epochs')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.grid('off')
plt.show()
训练和测试损失值随时间的变化情况如下:

(8) 对测试图像执行预测。
加载测试图像:
def show_bbs(im, bbs, clss):fig, ax = plt.subplots(ncols=2, nrows=1, figsize=(6, 6))ax[0].imshow(im)ax[0].grid(False)ax[0].set_title('Original image')if len(bbs) == 0:ax[1].imshow(im)ax[1].set_title('No objects')plt.show()returnax[1].imshow(im)for ix, (xmin, ymin, xmax, ymax) in enumerate(bbs):rect = mpatches.Rectangle((xmin, ymin), xmax-xmin, ymax-ymin, fill=False, edgecolor='red', linewidth=1)ax[1].add_patch(rect)centerx = xmin # + new_w/2centery = ymin + 20# + new_h - 10plt.text(centerx, centery, clss[ix].replace('@', ''),fontsize = 10,color='red')ax[1].grid(False)ax[1].set_title('Predicted bounding box and class')plt.show()from random import choice
image_paths = glob.glob(f'{DATA_ROOT}/images/*')
image_id = choice(test_ds.image_infos)
print(image_id)
img_path = find(image_id, test_ds.files)
original_image = Image.open(img_path, mode='r')
original_image = original_image.convert('RGB')
获取与图像中的目标对象对应的边界框、标签和置信度分数:
image_paths = glob.glob(f'{DATA_ROOT}/images/*')
for _ in range(20):image_id = choice(test_ds.image_infos)img_path = find(image_id, test_ds.files)original_image = Image.open(img_path, mode='r')bbs, labels, scores = detect(original_image, model, min_score=0.9, max_overlap=0.5,top_k=200, device=device)labels = [target2label[c.item()] for c in labels]label_with_conf = [f'{l} @ {s:.2f}' for l,s in zip(labels,scores)]print(bbs, label_with_conf)
在图像上绘制输出结果:
show_bbs(original_image, bbs=bbs, clss=label_with_conf)#, text_sz=10)

小结
SSD 使用基础网络(如 VGG16 或 ResNet )提取图像特征,然后,通过添加额外的卷积层和特征图金字塔来获取不同尺度的特征图。每个特征图单元预测固定数量的边界框,并预测每个边界框属于不同类别的概率。为了提高检测的准确性,SSD 还引入了不同大小的默认框,用于与预测的边界框进行匹配。本文首先介绍了 SSD 模型的核心思想与目标检测流程,然后使用 PyTorch 从零开始实现了一个基于 SSD 的目标检测模型。
系列链接
PyTorch深度学习实战(1)——神经网络与模型训练过程详解
PyTorch深度学习实战(2)——PyTorch基础
PyTorch深度学习实战(3)——使用PyTorch构建神经网络
PyTorch深度学习实战(4)——常用激活函数和损失函数详解
PyTorch深度学习实战(5)——计算机视觉基础
PyTorch深度学习实战(6)——神经网络性能优化技术
PyTorch深度学习实战(7)——批大小对神经网络训练的影响
PyTorch深度学习实战(8)——批归一化
PyTorch深度学习实战(9)——学习率优化
PyTorch深度学习实战(10)——过拟合及其解决方法
PyTorch深度学习实战(11)——卷积神经网络
PyTorch深度学习实战(12)——数据增强
PyTorch深度学习实战(13)——可视化神经网络中间层输出
PyTorch深度学习实战(14)——类激活图
PyTorch深度学习实战(15)——迁移学习
PyTorch深度学习实战(16)——面部关键点检测
PyTorch深度学习实战(17)——多任务学习
PyTorch深度学习实战(18)——目标检测基础
PyTorch深度学习实战(19)——从零开始实现R-CNN目标检测
PyTorch深度学习实战(20)——从零开始实现Fast R-CNN目标检测
PyTorch深度学习实战(21)——从零开始实现Faster R-CNN目标检测
PyTorch深度学习实战(22)——从零开始实现YOLO目标检测
PyTorch深度学习实战(23)——使用U-Net架构进行图像分割
PyTorch深度学习实战(24)——从零开始实现Mask R-CNN实例分割
PyTorch深度学习实战(25)——自编码器(Autoencoder)
PyTorch深度学习实战(26)——卷积自编码器(Convolutional Autoencoder)
PyTorch深度学习实战(27)——变分自编码器(Variational Autoencoder, VAE)
PyTorch深度学习实战(28)——对抗攻击(Adversarial Attack)
PyTorch深度学习实战(29)——神经风格迁移
PyTorch深度学习实战(30)——Deepfakes
PyTorch深度学习实战(31)——生成对抗网络(Generative Adversarial Network, GAN)
PyTorch深度学习实战(32)——DCGAN详解与实现
PyTorch深度学习实战(33)——条件生成对抗网络(Conditional Generative Adversarial Network, CGAN)
PyTorch深度学习实战(34)——Pix2Pix详解与实现
相关文章:
PyTorch深度学习实战(23)——从零开始实现SSD目标检测
PyTorch深度学习实战(23)——从零开始实现SSD目标检测 0. 前言1. SSD 目标检测模型1.1 SSD 网络架构1.2 利用不同网络层执行边界框和类别预测1.3 不同网络层中默认框的尺寸和宽高比1.4 数据准备1.5 模型训练 2. 实现 SSD 目标检测2.1 SSD300 架构2.2 Mul…...
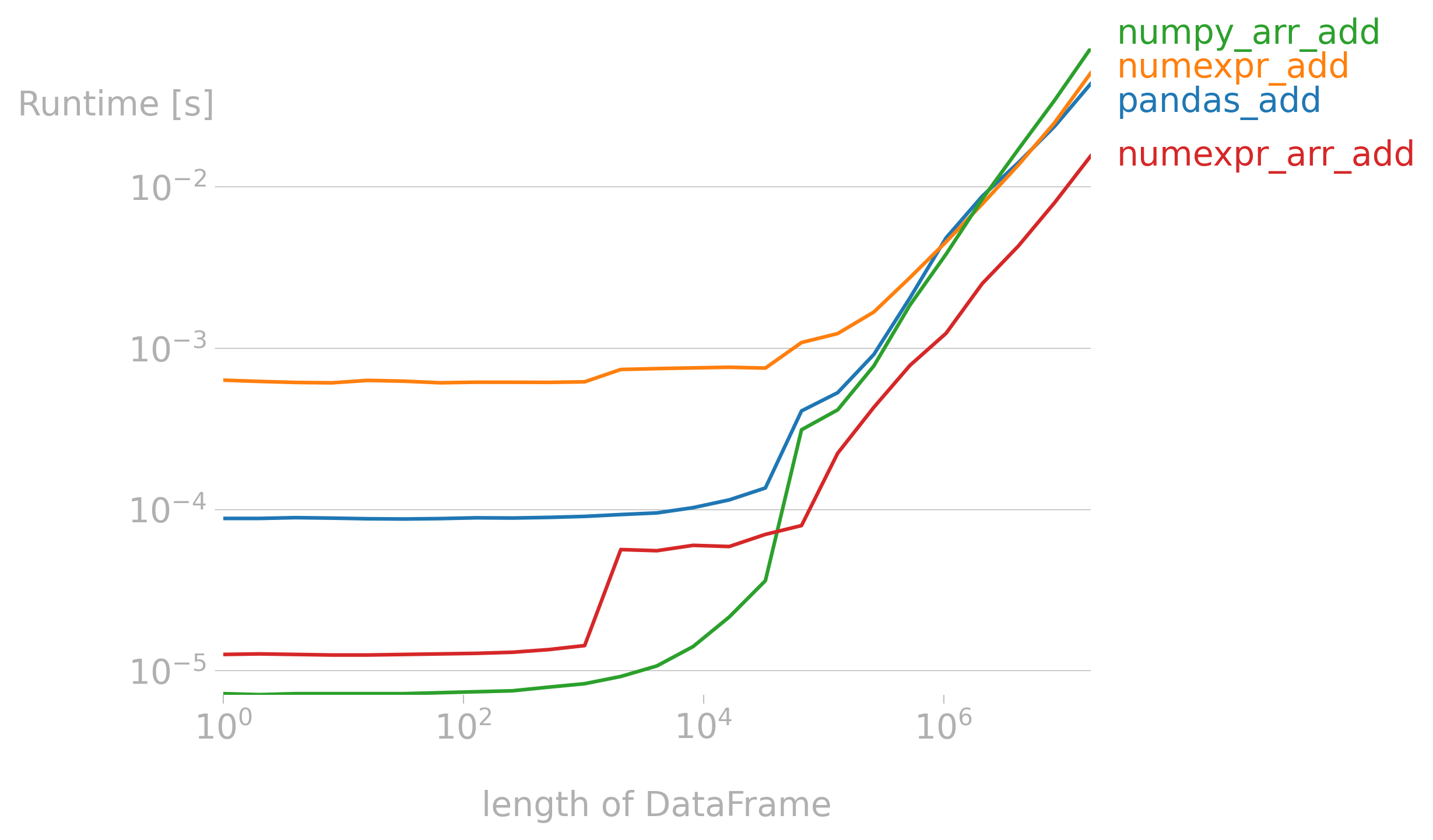
【附代码】NumPy加速库NumExpr(大数据)
文章目录 相关文献测试电脑配置数组加减乘除数组乘方Pandas加减乘除总结 作者:小猪快跑 基础数学&计算数学,从事优化领域5年,主要研究方向:MIP求解器、整数规划、随机规划、智能优化算法 如有错误,欢迎指正。如有…...

4、安全开发-Python-蓝队项目流量攻击分析文件动态监控图片隐写技术
用途:个人学习笔记,有所借鉴,欢迎指正! 总结: (1)使用python脚本Scapy库实现指定网卡的流量抓包分析 (2)使用python脚本Watchdog实现指定目录文件行为监控 (…...
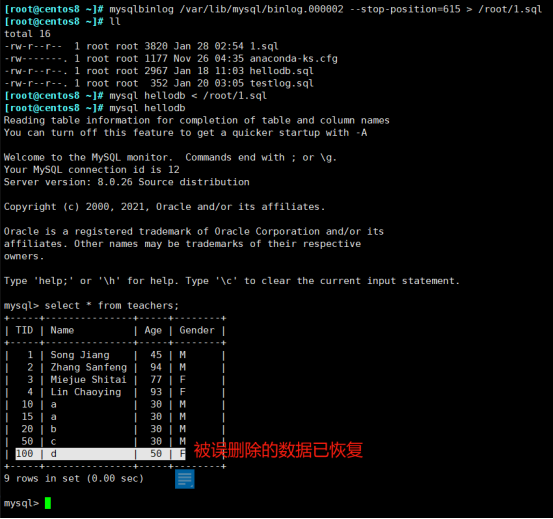
MySQL 日志管理
4.6)日志管理 MySQL 支持丰富的日志类型,如下: 事务日志:transaction log 事务日志的写入类型为 "追加",因此其操作为 "顺序IO"; 通常也被称为:预写式日志 write ahead…...
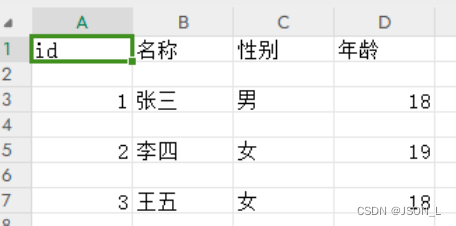
Python CSV文件读取和写入
本文主要为Python 实现CSV文件读取和写入操作。 CSV文件写入和读取 因为没有现成的csv文件,所以csv的顺序为先写入后读取。 写入 创建csv文件并把数据写入,有两种实现方式:直接插入所有行和插入单行。 示例如下: import csv i…...
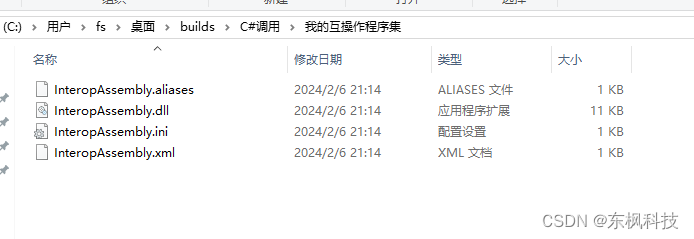
如何使用C#调用LabVIEW算法
新建一个工程 这是必须的; 创建项目 项目 点击完成; 将项目另存为;方便后续的使用; 创建 一个测试VI 功能很简单,用的一个加法;将加数A,B设置为输入,和C设置为输出,…...

调用百度文心AI作画API实现中文-图像跨模态生成
作者介绍 乔冠华,女,西安工程大学电子信息学院,2020级硕士研究生,张宏伟人工智能课题组。 研究方向:机器视觉与人工智能。 电子邮件:1078914066qq.com 一.文心AI作画API介绍 1. 文心AI作画 文…...

JAVA SpringBoot中使用redis的事务
目录 一、Java语言介绍 二、SpringBoot框架介绍 三、Redis缓存介绍 四、什么是redis的事务 一、Java语言介绍 Java是一种广泛使用的高级编程语言,由Sun Microsystems公司于1995年推出。它的设计目标是要求“一次编写,到处运行”(Write Once, Run Anywhere, WOR…...

docker部署自己的网站wordpress
目录 安装 1.创建目录 2.创建并启动mysql 3.创建并启动wordpress 使用 1.设置语言 2.设置基础信息 3.首页 安装 1.创建目录 mkdir -p /opt/wordpress/{db,data} 2.创建并启动mysql docker run -d --name my_mysql --restart always -e MYSQL_ROOT_PASSWORD123456 -e …...
基于ISO13400 (DoIP) 实现车辆刷写
近年来,在整车研发中基于以太网实现车辆高带宽通讯无疑是人们热议的话题。无论是车内基于车载以太网来减少线束成本,实现ADAS、信息娱乐系统等技术,还是基于新的电子电气架构以及远程诊断需求来实现以太网诊断(DoIP)&a…...

Chrome 沙箱逃逸 -- Plaid CTF 2020 mojo
文章目录 前置知识参考文章环境搭建题目环境调试环境 题目分析附件分析漏洞分析OOBUAF 漏洞利用总结 前置知识 Mojo & Services 简介 chromium mojo 快速入门 Mojo docs Intro to Mojo & Services 译文:利用Mojo IPC的UAF漏洞实现Chrome浏览器沙箱逃逸原文…...
汇编笔记 01
小蒟蒻的汇编自学笔记,如有错误,望不吝赐教 文章目录 笔记编辑器,启动!debug功能CS & IPmovaddsub汇编语言寄存器的英文全称中英对照表muldivandor 笔记 编辑器,启动! 进入 debug 模式 debug功能 …...

C语言:矩阵中的最小元素
题目描述 给定一个5X5的整数矩阵,找出其中最小的元素,输出所在的行号、列号和元素值,其中行号和列号都从0开始。 例如,有矩阵: 5 86 53 50 18 25 67 79 44 68 79 63 24 84 100 42 30 59 47 37 28 10 32 23 81 其中最小…...
- 压力测试)
【原创】MQTT开发笔记(四)- 压力测试
一、前言 Jmeter 是 apache 公司基于 java 开发的一款开源压力测试工具,体积小,功能全,使用方便,是一个比较轻量级的测试工具,使用起来非常简 单。因为 jmeter 是 java 开发的,所以运行的时候必须先要安装 …...
vue 引入 百度地图API 和 路书
公司项目中,偶尔都会涉及到地图的使用,这里以百度地图为例,我们梳理一下引用流程及注意点 账号和获取密钥 百度地图示例 百度地图 类参考 1、账号和获取密钥 // api.map.baidu.com/api?typewebgl&v3.0&ak您的密钥<script type…...
)
【QT+QGIS跨平台编译】之二十六:【SpatialIndex+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、SpatialIndex介绍二、文件下载三、文件分析四、pro文件五、编译实践一、SpatialIndex介绍 SpatialIndex是一个用于高效处理空间数据的C++库,基于R树索引结构实现。它提供了一系列的空间操作和查询算法,能够快速地对大规模空间数据进行检索和分析。 SpatialInd…...
SQL在云计算中的新角色:重新定义数据分析
文章目录 1. 云计算与数据分析的融合2. SQL在云计算中的新角色3. 分布式SQL查询引擎4. SQL-on-Hadoop解决方案5. SQL与其他数据分析工具的集成6. 实时数据分析与SQL7. SQL在云数据仓库中的角色8. 安全性与隐私保护9. SQL的未来展望《SQL数据分析实战(第2版ÿ…...

云安全的基本概念(基本目标与指导方针)
目录 一、云安全概念概述 1.1 概述 二、云安全的基本目标 2.1 安全策略开发模型 2.1.1 信息安全三元组 2.1.1.1 保密性(Confidentiality) 2.1.1.2 完整性(Integrity) 2.1.1.3 可用性(Availability) 2.1.2 信息安全三元组的局限性 2.2 其他信息安全属性 2.2.1 真实性 …...

猫头虎分享已解决Bug || docker: Error response from daemon: network not found
博主猫头虎的技术世界 🌟 欢迎来到猫头虎的博客 — 探索技术的无限可能! 专栏链接: 🔗 精选专栏: 《面试题大全》 — 面试准备的宝典!《IDEA开发秘籍》 — 提升你的IDEA技能!《100天精通鸿蒙》 …...

《幻兽帕鲁》攻略:0基础入门及游戏基础操作 幻兽帕鲁基础设施 幻兽帕鲁基础攻击力 Mac苹果电脑玩幻兽帕鲁 幻兽帕鲁加班加点
今天就跟大家聊聊《幻兽帕鲁》攻略:0基础入门及游戏基础操作。 如果想在苹果电脑玩《幻兽帕鲁》记得安装CrossOver哦。 以下纯干货: CrossOver正版安装包(免费试用):https://souurl.cn/Y1gDao 一、基础操作 二、界面…...
)
告别设备标识混乱!用uniappx插件Ba-IdCode-U一站式获取OAID/AndroidID/IMEI(附隐私合规指南)
跨平台开发者的设备标识管理实战:从混乱到合规的完整解决方案 每次启动新项目时,开发者们是否总在纠结该用哪种设备标识?OAID、AndroidID还是IMEI?国内厂商的兼容性问题怎么解决?隐私合规的红线又在哪里?本…...
)
保姆级教程:用snntorch在MNIST上训练你的第一个脉冲神经网络(附完整代码)
从零开始:用snntorch构建你的第一个脉冲神经网络手记 第一次接触脉冲神经网络(SNN)时,我被它模拟生物神经元放电的特性深深吸引。与传统人工神经网络不同,SNN通过离散的脉冲信号传递信息,更接近人脑的工作机…...

终极指南:如何让2007年旧Mac运行最新macOS系统
终极指南:如何让2007年旧Mac运行最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher 体验与之前一样的macOS 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 还在为那台陪伴多年的老Mac无法升级最新系统而烦恼吗࿱…...
)
泛微E9流程表单转PDF/HTML实战:手把手教你集成档案系统(附完整代码)
泛微E9流程表单转PDF/HTML全流程开发指南:从原理到实战 在企业管理数字化转型的浪潮中,OA系统与档案系统的无缝对接已成为提升组织效能的刚需。作为国内主流的协同办公平台,泛微E9的流程表单承载着企业核心业务流程数据,如何将这些…...

开源工具gInk:高效标注从入门到精通
开源工具gInk:高效标注从入门到精通 【免费下载链接】gInk An easy to use on-screen annotation software inspired by Epic Pen. 项目地址: https://gitcode.com/gh_mirrors/gi/gInk 在数字化协作与远程沟通日益频繁的今天,屏幕标注工具已成为提…...

终极Ghidra安装指南:5分钟在Ubuntu系统快速部署逆向工程神器
终极Ghidra安装指南:5分钟在Ubuntu系统快速部署逆向工程神器 【免费下载链接】ghidra_installer Helper scripts to set up OpenJDK 11 and scale Ghidra for 4K on Ubuntu 18.04 / 18.10 项目地址: https://gitcode.com/gh_mirrors/gh/ghidra_installer 想要…...

双模型协作:OpenClaw同时调用GLM-4.7-Flash与Coder模型实战
双模型协作:OpenClaw同时调用GLM-4.7-Flash与Coder模型实战 1. 为什么需要双模型协作? 在我的日常开发工作中,经常遇到这样的场景:需要先理解一个复杂需求(比如"帮我写个爬虫抓取知乎热榜并分析关键词"&am…...

RWKV7-1.5B-g1a惊艳案例:将复杂段落压缩为三条逻辑闭环要点
RWKV7-1.5B-g1a惊艳案例:将复杂段落压缩为三条逻辑闭环要点 1. 模型能力展示:从复杂到简洁的文本处理 RWKV7-1.5B-g1a作为一款轻量级文本生成模型,在信息压缩和提炼方面展现出令人惊喜的能力。我们通过一个实际案例来展示它如何将复杂内容转…...

UEFI安全启动恢复流程文档:详细操作指南与故障排除
UEFI安全启动恢复流程文档:详细操作指南与故障排除 【免费下载链接】edk2 EDK II 项目地址: https://gitcode.com/gh_mirrors/ed/edk2 UEFI安全启动是现代计算机系统的重要安全功能,它通过数字签名验证确保只有受信任的操作系统和引导加载程序能够…...

RWKV7-1.5B-G1A入门实战:手把手教你写文案、做总结、玩对话
RWKV7-1.5B-G1A入门实战:手把手教你写文案、做总结、玩对话 1. 认识RWKV7-1.5B-G1A RWKV7-1.5B-G1A是一个基于RWKV-7架构的多语言文本生成模型,特别适合处理基础问答、文案续写、简短总结和轻量中文对话任务。这个1.5B参数的模型在保持良好生成质量的同…...