AI算法工程师-非leetcode题目总结
AI算法工程师-非leetcode题目总结
- 除了Leetcode你还需要这些
- 实现nms
- 旋转矩形IOU
- 手动实现BN
- 手动实现CONV
- 实现CrossEntropyLoss
除了Leetcode你还需要这些
希望大家留言,我可以进行补充。持续更新~~~
实现nms
import numpy as np
def nms(dets, threshold):x1 = dets[:, 0]y1 = dets[:, 1]x2 = dets[:, 2]y2 = dets[:, 3]score = dets[:, 4]area = (x2 - x1 +1)* (y2-y1+1)keep = []order = score.argsort()[::-1]while len(order) >= 1:i = order[0]keep.append(i)xx1 = np.maximum(x1[i], x1[order[1:]])yy1 = np.maximum(y1[i], y1[order[1:]])xx2 = np.minimum(x2[i], x2[order[1:]])yy2 = np.minimum(y2[i], y2[order[1:]])w = np.maximum(xx2-xx1 +1, 0)h = np.maximum(yy2-yy1+1, 0)inter = w * hiou = inter / (area[i] + area[order[1:]] - inter)idx = np.where(iou <= threshold)[0]order = order[idx+1]return keepdets = np.array([[10, 10, 50, 50, 0.9] , [20, 20, 50, 50, 0.8] ,[50, 50, 100, 100, 0.7] ])
print(nms(dets, 0.5))
旋转矩形IOU
import numpy as np
import cv2# 中心点 矩形的w h, 旋转的theta(角度,不是弧度)
def iou_rotate_calculate(boxes1, boxes2):area1 = boxes1[:, 2] * boxes1[:, 3]area2 = boxes2[:, 2] * boxes2[:, 3]ious = []for i, box1 in enumerate(boxes1):temp_ious = []r1 = ((box1[0], box1[1]), (box1[2], box1[3]), box1[4])for j, box2 in enumerate(boxes2):r2 = ((box2[0], box2[1]), (box2[2], box2[3]), box2[4])int_pts = cv2.rotatedRectangleIntersection(r1, r2)[1]if int_pts is not None:order_pts = cv2.convexHull(int_pts, returnPoints=True)int_area = cv2.contourArea(order_pts)inter = int_area * 1.0 / (area1[i] + area2[j] - int_area)temp_ious.append(inter)else:temp_ious.append(0.0)ious.append(temp_ious)return np.array(ious, dtype=np.float32)手动实现BN
y = x − m e a n / v a r + e − 6 , . y = x - mean /var+e^-6,. y=x−mean/var+e−6,.
BN在训练的过程中和测试的过程中应该如何设置:
训练时的数据量大,分布更加稳定;eval数据量有限不建议大规模更改mean和var;
eval: trainning=False, track_running_stats=True。这个是期望中的测试阶段的设置,此时BN会用之前训练好的模型中的(假设已经保存下了)running_mean和running_var并且不会对其进行更新。一般来说,只需要设置model.eval()其中model中含有BN层,即可实现这个功能。
train: trainning=True, track_running_stats=True。这个是期望中的训练阶段的设置,此时BN将会跟踪整个训练过程中batch的统计特性。
import numpy as np
class BN:def __init__(self, momentum, eps, num_features):"""初始化参数值:param momentum: 追踪样本整体均值和方差的动量:param eps: 防止数值计算错误:param num_features: 特征数量"""# 对每个batch的mean和var进行追踪统计self._running_mean = 0self._running_var = 1# 更新self._running_xxx时的动量self._momentum = momentum# 防止分母计算为0self._eps = eps# 对应论文中需要更新的beta和gamma,采用pytorch文档中的初始化值self._beta = np.zeros(shape=(num_features, ))self._gamma = np.ones(shape=(num_features, ))def batch_norm(self, x):"""BN向传播:param x: 数据:return: BN输出"""x_mean = x.mean(axis=0)x_var = x.var(axis=0)# 对应running_mean的更新公式self._running_mean = (1-self._momentum)*x_mean + self._momentum*self._running_meanself._running_var = (1-self._momentum)*x_var + self._momentum*self._running_var# 对应论文中计算BN的公式x_hat = (x-x_mean)/np.sqrt(x_var+self._eps)y = self._gamma*x_hat + self._betareturn y
手动实现CONV
使用了简化版本,类实现的太多了,背不上;
import numpy as npdef conv2d_numpy(input_data, kernel, stride=1, padding=0):# 获取输入数据的尺寸input_height, input_width = input_data.shape# 获取卷积核的尺寸kernel_height, kernel_width = kernel.shape# 计算输出图像的尺寸output_height = (input_height - kernel_height + 2 * padding) // stride + 1output_width = (input_width - kernel_width + 2 * padding) // stride + 1# 初始化输出图像output_data = np.zeros((output_height, output_width))# 填充输入数据(根据填充数量添加额外的行和列)if padding > 0:input_data = np.pad(input_data, ((padding, padding), (padding, padding)), mode='constant')# 执行卷积操作for i in range(0, input_height - kernel_height + 1, stride):for j in range(0, input_width - kernel_width + 1, stride):output_data[i // stride, j // stride] = np.sum(input_data[i:i + kernel_height, j:j + kernel_width] * kernel)return output_data# 创建一个示例的二维图片数据(4x4 像素)
image = np.array([[1, 2, 3, 4],[5, 6, 7, 8],[9, 10, 11, 12],[13, 14, 15, 16]], dtype=np.float32)# 定义一个卷积核(滤波器)
kernel = np.array([[1, 1],[0, -1]], dtype=np.float32)# 执行自定义的卷积操作
result = conv2d_numpy(image, kernel, stride=1, padding=0)# 打印卷积结果
print(result)
实现CrossEntropyLoss
import torchdef my_cross_entropy(input, target, reduction="mean"):# input.shape: torch.size([-1, class])# target.shape: torch.size([-1])# reduction = "mean" or "sum"# input是模型输出的结果,与target求loss# target的长度和input第一维的长度一致# target的元素值为目标class# reduction默认为mean,即对loss求均值# 还有另一种为sum,对loss求和# 这里对input所有元素求expexp = torch.exp(input)# 根据target的索引,在exp第一维取出元素值,这是softmax的分子tmp1 = exp.gather(1, target.unsqueeze(-1)).squeeze()# 在exp第一维求和,这是softmax的分母tmp2 = exp.sum(1)# softmax公式:ei / sum(ej)softmax = tmp1 / tmp2# cross-entropy公式: -yi * log(pi)# 因为target的yi为1,其余为0,所以在tmp1直接把目标拿出来,# 公式中的pi就是softmax的结果log = -torch.log(softmax)# 官方实现中,reduction有mean/sum及none# 只是对交叉熵后处理的差别if reduction == "mean": return log.mean()else: return log.sum()my_cross_entropy([1, 0], [1,1])
相关文章:

AI算法工程师-非leetcode题目总结
AI算法工程师-非leetcode题目总结 除了Leetcode你还需要这些实现nms旋转矩形IOU手动实现BN手动实现CONV实现CrossEntropyLoss 除了Leetcode你还需要这些 希望大家留言,我可以进行补充。持续更新~~~ 实现nms import numpy as np def nms(dets, threshold):x1 dets…...
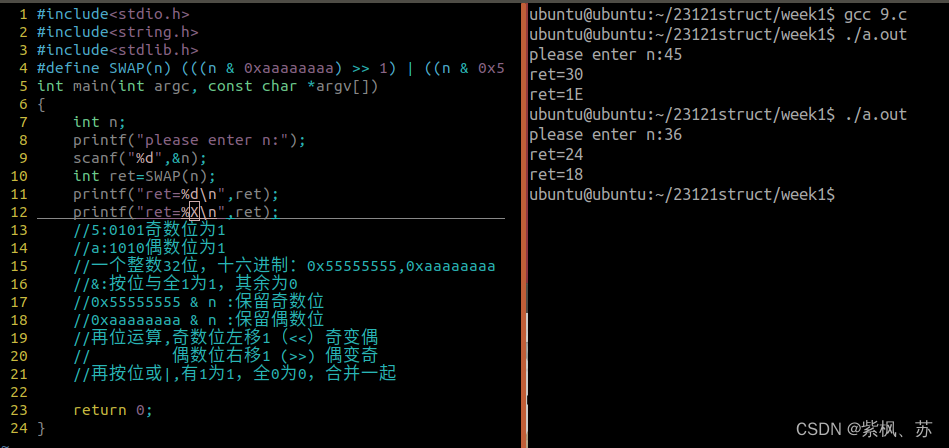
2.6:冒泡、简选、直插、快排,递归,宏
1.冒泡排序、简单选择排序、直接插入排序、快速排序(升序) 程序代码: 1 #include<stdio.h>2 #include<string.h>3 #include<stdlib.h>4 void Bubble(int arr[],int len);5 void simple_sort(int arr[],int len);6 void insert_sort(int arr[],in…...
FastDFS安装并整合Openresty
FastDFS安装并整合Openresty 一、安装环境准备【CentOS7.9】二、FastDFS--tracker安装2.1.下载fastdfs2.2.FastDFS安装环境2.3.安装FastDFS依赖libevent库2.4.安装libfastcommon2.5.安装 libserverframe 网络框架2.6.tracker编译安装2.7.安装之后文件目录介绍2.8.错误处理2.9.配…...
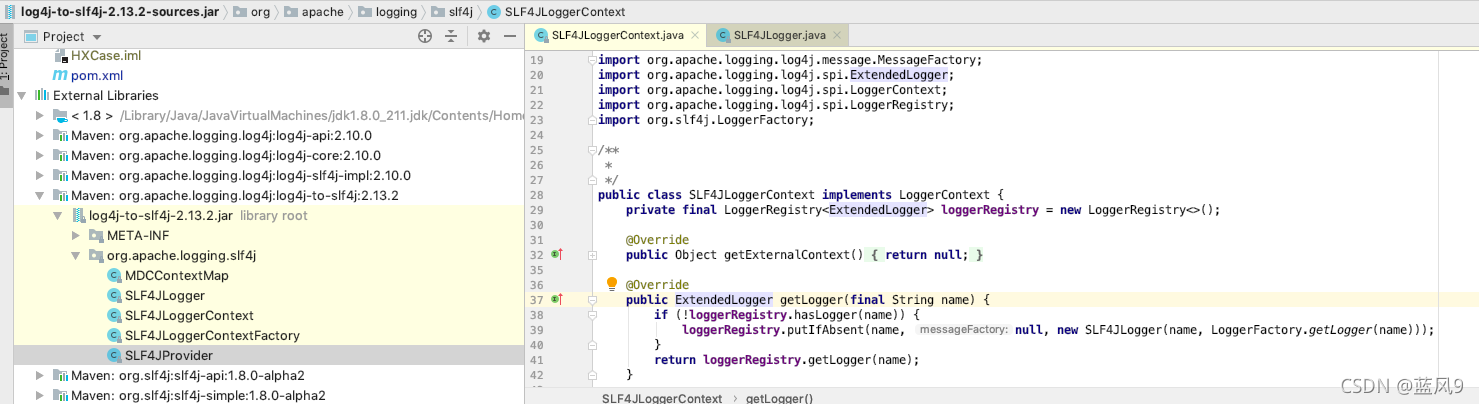
93 log4j-slf4j-impl 搭配上 log4j-to-slf4j 导致的 StackOverflow
前言 呵呵 最近想要 做一个 mongo 低版本的客户端读取高版本的服务端传递过来的数据造成的一个错误的时候, 出现了这样的问题 引入了 mongo-java-driver 之后, 使用相关 api 的时候会触发 com.mongo.internal.connection.BaseCluser 的初始化, 其依赖的 Loggers 间接的依赖…...
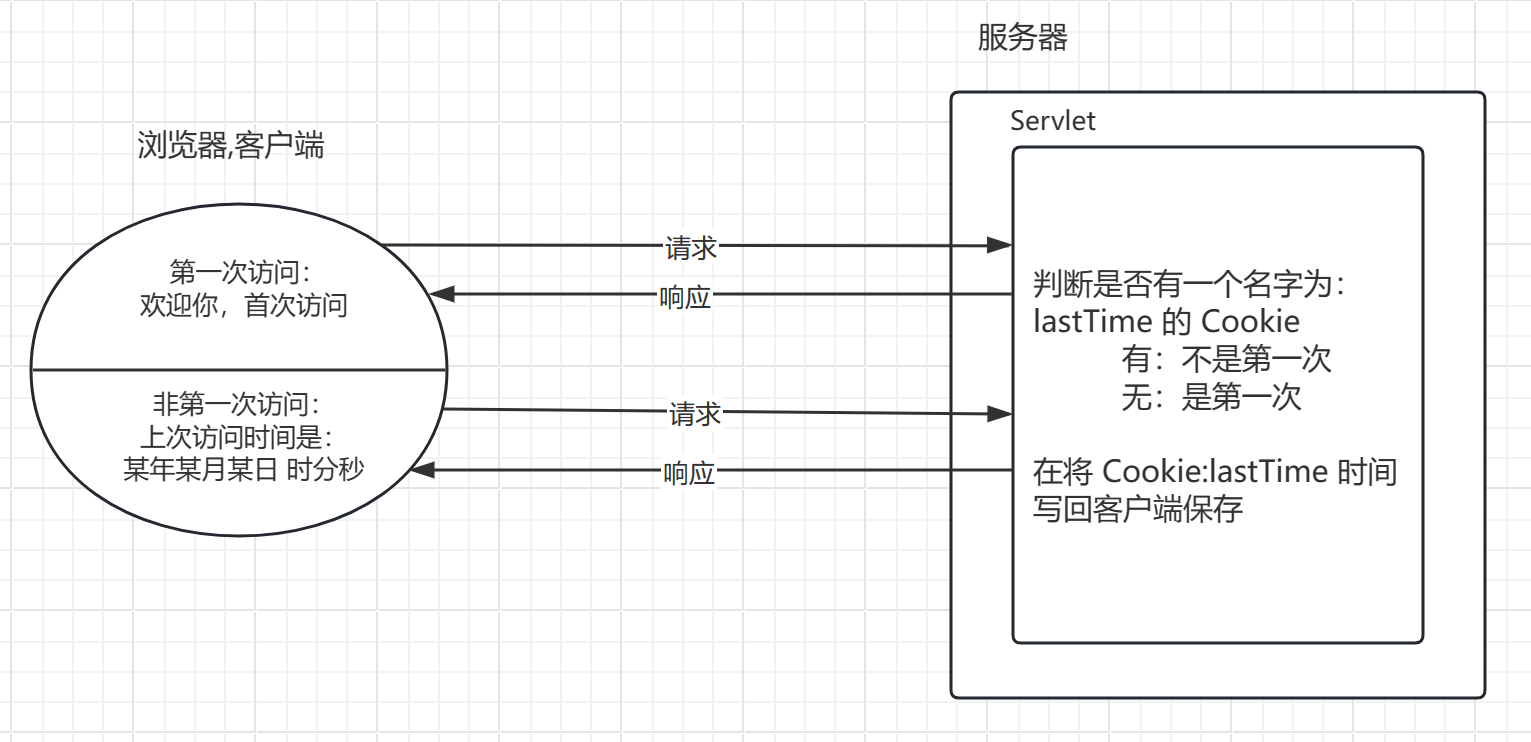
客户端会话技术-Cookie
一、会话技术 1.1 概述 会话:一次会话中包含多次**请求和响应** 一次会话:浏览器第一次给服务器资源发送请求,此时会话建立,直到有一方断开为止 会话的功能:在一次会话的范围内的多次请求间,共享数据 …...

rsa加密登录解决方案
1.问题 账密登录方式中用户输入密码后,把账号、密码通过http传输到后端进行校验,然而密码属于敏感信息,不能以明文传输,否则容易被拦截窃取,因此需要考虑如何安全传输密码 2.解决方案 使用rsa加密方式,r…...

速盾:海外服务器用了cdn还是卡怎么办
海外服务器使用CDN卡顿问题的解决办法 在如今互联网高速发展的时代,海外服务器成为了许多企业和个人用户的首选,因为它能够提供更高的带宽和更稳定的网络连接。然而,尽管海外服务器在网络性能方面表现出色,但在使用过程中仍然可能…...

[python-opencv] PNG 裁切物体
拿到一组图PNG的图,边缘有点太宽了,需要裁切一下,为了这个需求,简单复习一下基本语法。 1. 读取PNG的4个通道 image cv.imread(image_path, cv.IMREAD_UNCHANGED) 附参数说明: IMREAD_UNCHANGED -1 返…...
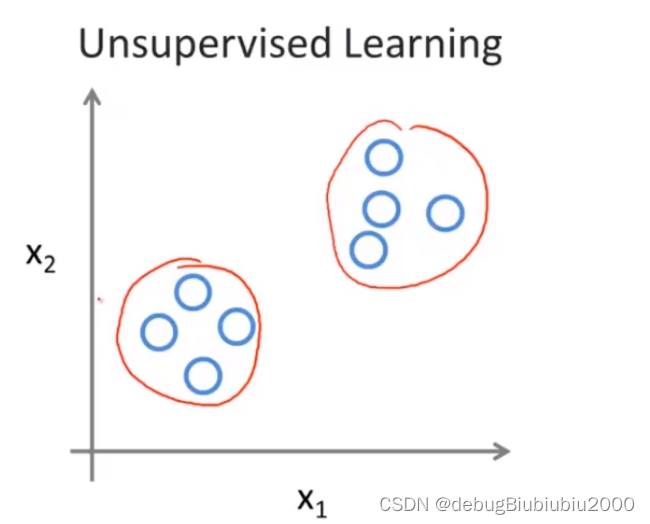
机器学习——有监督学习和无监督学习
有监督学习 简单来说,就是人教会计算机学会做一件事。 给算法一个数据集,其中数据集中包含了正确答案,根据这个数据集,可以对额外的数据希望得到一个正确判断(详见下面的例子) 回归问题 例如现在有一个…...

MySQL单主模式部署组复制集群
前言 本篇文章介绍MySQL8.0.27版本的组复制详细搭建过程,教你如何快速搭建一个三节点的单主模式组复制集群。 实际上,MySQL组复制是MySQL的一个插件 group_replication.so,组中的每个成员都需要配置并安装该插件,配置和安装过程…...
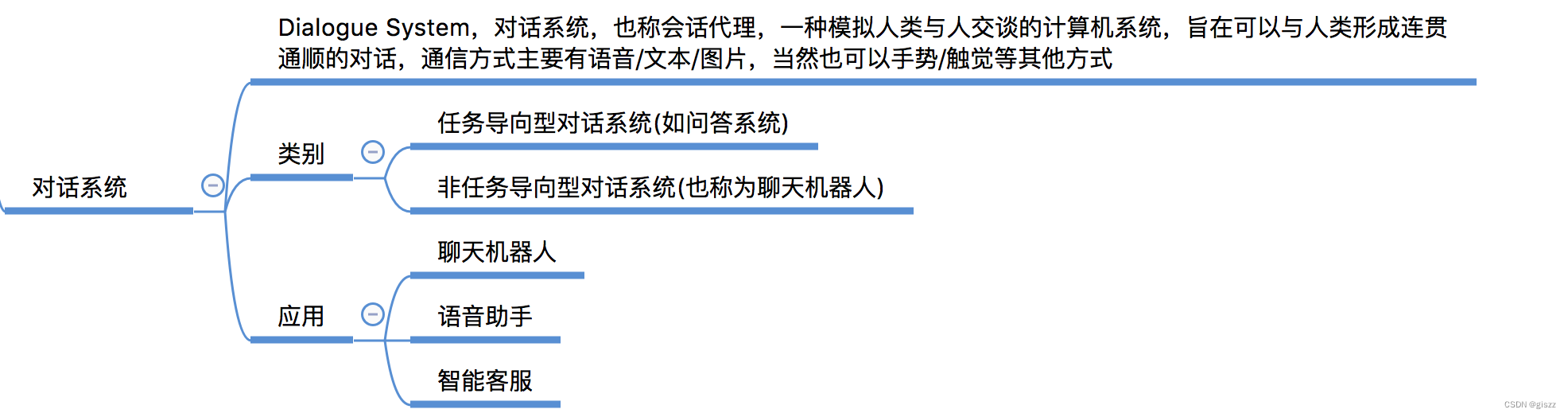
【大厂AI课学习笔记】【1.5 AI技术领域】(10)对话系统
对话系统,Dialogue System,也称为会话代理。是一种模拟人类与人交谈的计算机系统,旨在可以与人类形成连贯通顺的对话,通信方式主要有语音/文本/图片,当然也可以手势/触觉等其他方式 一般我们将对话系统,分…...

【ARM 嵌入式 编译系列 2.7 -- GCC 编译优化参数详细介绍】
请阅读【嵌入式开发学习必备专栏 】 文章目录 GCC 编译优化概述常用优化等级-O1 打开的优化选项-O2 打开的优化选项-O3 打开的优化选项-Os 打开的优化选项优化技术使用优化选项的注意事项GCC 编译优化概述 GCC(GNU Compiler Collection)包含了用于C、C++、Objective-C、Fort…...
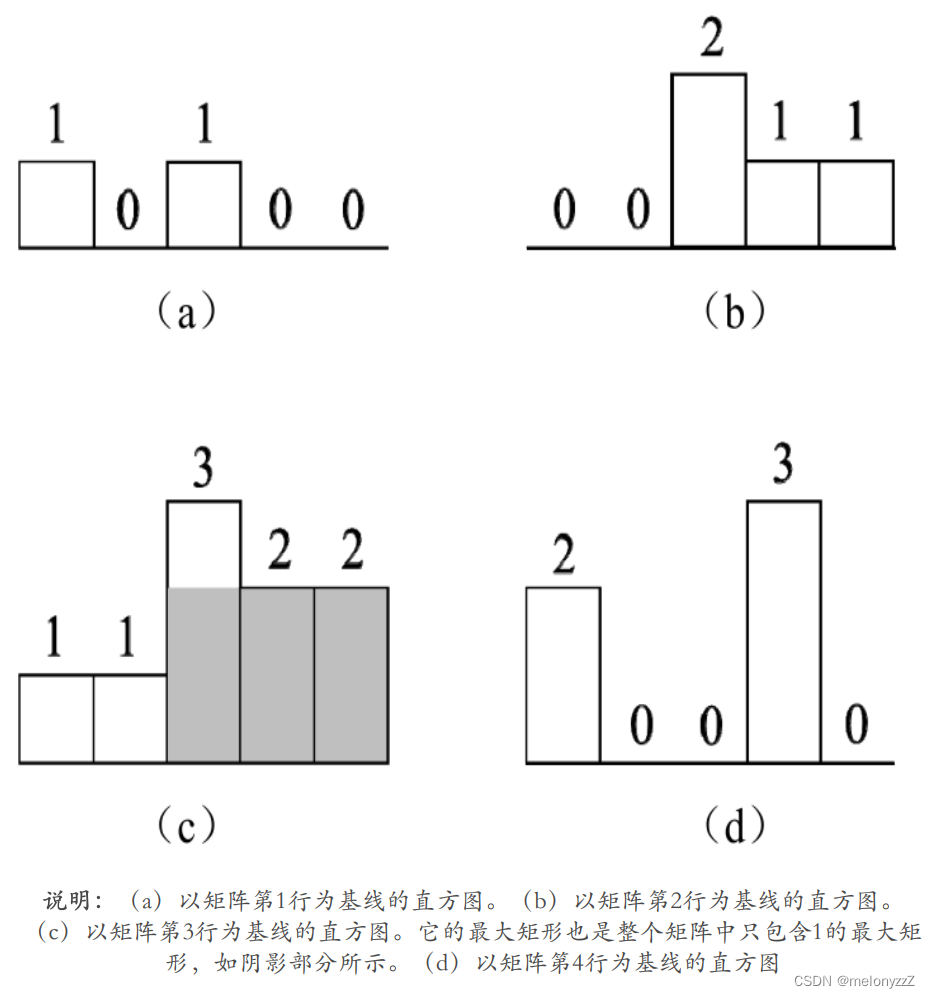
《剑指 Offer》专项突破版 - 面试题 38、39 和 40 : 通过三道面试题详解单调栈(C++ 实现)
目录 面试题 38 : 每日温度 面试题 39 : 直方图最大矩形面积 方法一、暴力求解 方法二、递归求解 方法三、单调栈法 面试题 40 : 矩阵中的最大矩形 面试题 38 : 每日温度 题目: 输入一个数组,它的每个数字是某天的温度。请计算每天需要等几天才会…...

动态规划C语言
#include <stdio.h> #include <stdlib.h> //0-1背包问题是一种经典的组合优化问题, //问题描述为:有一个给定容量的背包和一组具有不同价值和重量的物品,如何选择物品放入背包中,以使得背包中物品的总价值最大化&…...
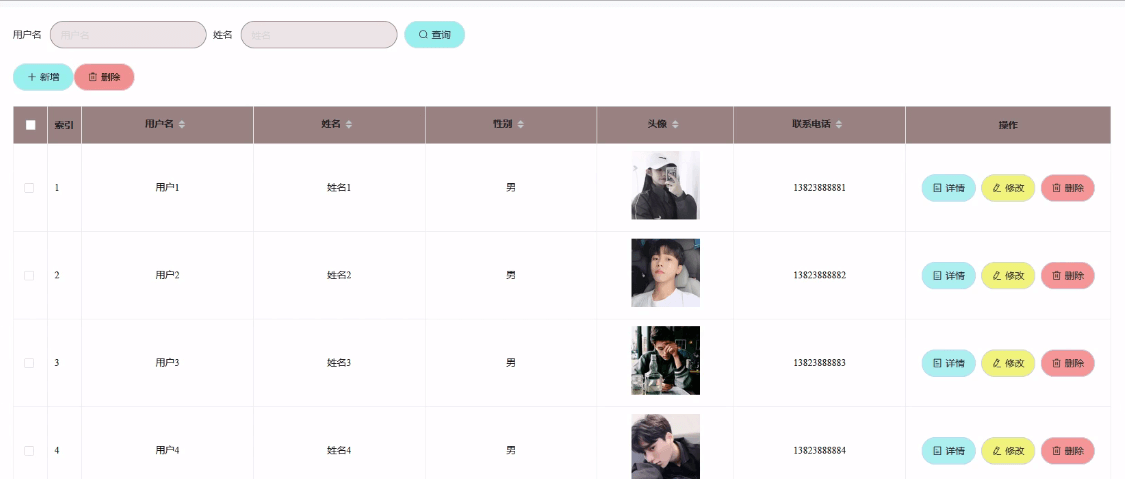
基于微信小程序的校园二手交易平台
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝12w、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇…...
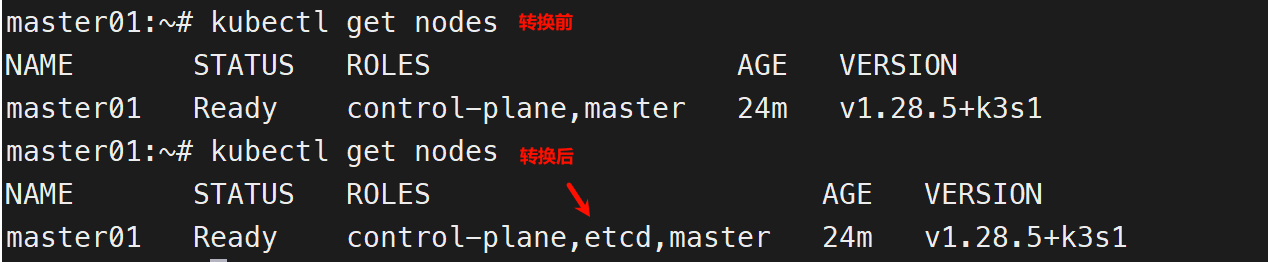
K8S系列文章之 [使用 Alpine 搭建 k3s]
官方文档:K3s - 轻量级 Kubernetes | K3s 官方描述,可运行在 systemd 或者 openrc 环境上,那就往精简方向走,使用 alpine 做系统。与 RHEL、Debian 的区别,主要在防火墙侧;其他基础配置需求类似࿰…...
计算机视觉 | OpenCV 实现手势虚拟控制亮度和音量
Hi,大家好,我是半亩花海。在当今科技飞速发展的时代,我们身边充斥着各种智能设备,然而,如何更便捷地与这些设备进行交互却是一个不断被探索的课题。本文将主要介绍一个基于 OpenCV 的手势识别项目,通过手势…...
python28-Python的运算符之三目运算符
Python可通过if语句来实现三目运算符的功能,因此可以近似地把这种if语句当成三目运算符。作为三目运算符的f语句的语法格式如下 True_statements if expression else False_statements 三目运算符的规则是:先对逻辑表达式expression求值,如果逻辑表达式…...

高德 API 10009
问题 笔者使用高德地图所提供的API接口,访问接口报错 {"info":"USERKEY_PLAT_NOMATCH","infocode":"10009","status":"0","sec_code_debug":"d41d8cd98f00b204e9800998ecf8427e"…...
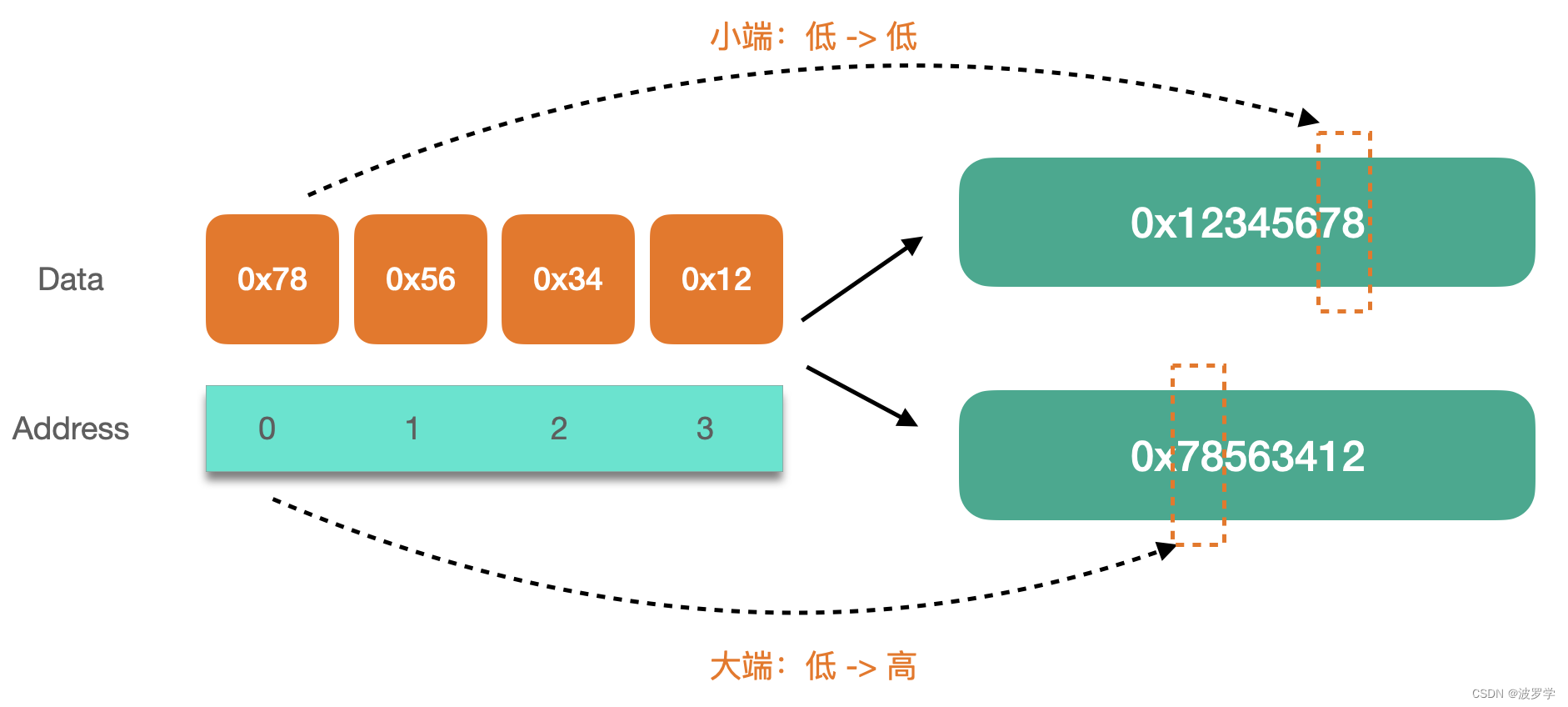
Go 语言中如何大小端字节序?int 转 byte 是如何进行的?
嗨,大家好!我是波罗学。 本文是系列文章 Go 技巧第十五篇,系列文章查看:Go 语言技巧。 我们先看这样一个问题:“Go 语言中,将 byte 转换为 int 时是否涉及字节序(endianness)&#x…...

3步解锁PowerToys文本提取器:Windows用户的智能OCR终极指南
3步解锁PowerToys文本提取器:Windows用户的智能OCR终极指南 【免费下载链接】PowerToys Microsoft PowerToys is a collection of utilities that supercharge productivity and customization on Windows 项目地址: https://gitcode.com/GitHub_Trending/po/Powe…...
)
Cadence SKILL脚本实战:5分钟搞定TESTKEY原理图批量创建(附完整代码)
Cadence SKILL脚本实战:5分钟搞定TESTKEY原理图批量创建(附完整代码) 在集成电路设计领域,TESTKEY(测试结构)的创建是验证工艺模型和器件特性的基础工作。传统手动放置器件的方式不仅效率低下,还…...

从Verilog到GDS:用Calibre nmLVS-H模式搞定复杂芯片的层级化物理验证
从Verilog到GDS:用Calibre nmLVS-H模式搞定复杂芯片的层级化物理验证 在当今超大规模集成电路设计中,物理验证已成为确保芯片功能正确的最后一道防线。随着工艺节点不断微缩,设计复杂度呈指数级增长,传统的扁平化验证方法已难以应…...

抖音批量下载工具终极指南:3分钟实现无水印高效下载
抖音批量下载工具终极指南:3分钟实现无水印高效下载 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...

C# 环境:深入解析与应用
C# 环境:深入解析与应用 引言 C#(读作“C Sharp”)是一种由微软开发的高级编程语言,广泛应用于Windows平台的应用程序开发。自从2002年推出以来,C#已经成为了全球开发者喜爱的编程语言之一。本文将深入解析C#环境,包括其特点、应用场景以及开发环境搭建等。 C#环境概述…...

帆软FineReport 10升级实战:从路径映射到安全配置的完整指南
1. 从FineReport 9到10的升级背景与准备工作 最近接手了一个企业级报表系统的升级项目,需要将现有的FineReport 9环境迁移到最新的10版本。在实际操作过程中发现,这不仅仅是简单的版本替换,而是涉及到路径映射、参数调整、安全配置等多个关键…...

MobaXterm自定义语法高亮进阶:修复绿色失效与打造个性化终端
1. 为什么你的MobaXterm绿色高亮总是不亮? 第一次用MobaXterm时我就被它的彩色终端吸引了,特别是成功操作会显示醒目的绿色,失败提示则是刺眼的红色。但用了两周后突然发现:所有成功操作的绿色提示全都消失了!这就像开…...

天龙八部单机版GM工具:5分钟快速上手指南与完整功能解析
天龙八部单机版GM工具:5分钟快速上手指南与完整功能解析 【免费下载链接】TlbbGmTool 某网络游戏的单机版本GM工具 项目地址: https://gitcode.com/gh_mirrors/tl/TlbbGmTool 还在为《天龙八部》单机版的数据管理而烦恼吗?TlbbGmTool是一款专为天…...

别再死记硬背了!用一张图+三个故事彻底搞懂PCIe TLP帧结构
用快递、交通与银行故事轻松掌握PCIe TLP帧结构 每次打开PCIe协议文档,看到那些密密麻麻的字段定义,是不是感觉头大如斗?Fmt、Type、TC、Attr...这些抽象术语就像一堵高墙,把许多工程师挡在了深入理解PCIe的大门之外。但今天&…...

【GitHub热门工具】TikTokDownloader深度体验:从零到一的抖音/TikTok视频下载实战
1. 为什么我们需要TikTokDownloader? 最近在社交媒体上看到一个超有趣的视频,想保存下来反复观看或者分享给朋友,却发现平台没有提供下载按钮?这种场景相信很多人都遇到过。TikTokDownloader就是为了解决这个痛点而生的开源工具&a…...