机器人抓取 [ 题目/摘要 ] 更新中..
题目:Robotic Grasping of Novel Objects using Visionl
链接:机器人抓取新物体 | IEEE Xplore(IEEE的Xplore)
【端到端】
摘要:我们考虑抓取新物体的问题,特别是第一次通过视觉看到的物体。抓取以前未知的物体,一个没有3D模型的物体,是一个具有挑战性的问题。此外,即使给定一个模型,人们仍然必须决定在哪里抓住物体。我们提出了一种学习算法,它既不需要也不尝试构建对象的 3D 模型。给定一个物体的两张(或更多)图像,我们的算法试图在每个图像中识别几个点,这些点对应于抓取物体的良好位置。然后对这组稀疏的点进行三角测量,以获得尝试抓取的三维位置。这与标准的密集立体形成鲜明对比,后者试图对图像中的每个点进行三角测量(并且通常无法返回良好的 3D 模型)。我们用于从图像中识别抓取位置的算法是通过监督学习进行训练的,使用合成图像作为训练集。我们在两个机器人操作平台上演示了这种方法。我们的算法成功地抓取了各种各样的物体,如盘子、胶带卷、水壶、手机、钥匙、螺丝刀、订书机、粗线圈、形状奇特的电源喇叭等,这些在训练集中都没有出现。我们还将我们的方法应用于从洗碗机中卸载物品的任务。
题目:Grasping Unknown Objects in Clutter by Superquadric Representation
链接:通过超二次表示抓取杂波中的未知对象 |IEEE会议出版物 |IEEE Xplore
【传统】
摘要:本文提出了一种快速有效的杂波中未知物体抓取方法。抓取方法依赖于局部视图对象的实时超二次(SQ)表示和不完整的对象建模,非常适合杂乱场景中的未知对称对象,然后进行优化的对跖抓取。不完整的对象模型通过镜像算法进行处理,该算法假定对称性,首先创建一个近似的完整模型,然后适合 SQ 表示。抓取算法旨在实现最大的力平衡和稳定性,利用从 SQ 参数中快速检索尺寸和表面曲率信息的优势。计算SQ相对于重力方向的姿态,并与SQ的参数和夹持器的规格一起使用,以选择接近和接触点的最佳方向。SQ 拟合方法已在包含孤立对象和杂乱对象的自定义数据集上进行了测试。在PR2机器人上评估抓取算法,并给出实时结果。初步结果表明,尽管该方法基于简单的形状信息,但它优于其他基于学习的抓取算法,这些算法在时间效率和准确性方面也处于混乱状态。
题目:Soft contact grasping and orientation control of a rigid object using multibond graph
链接:使用多键图对刚性物体进行软接触抓取和方向控制
【传统】
摘要:物体的软接触操作包括抓取、滑动、位移和方向控制。应用所建立的软接触键图模型,实现了两个垂直软垫之间圆柱盘、椭圆盘和方形块的抓取。所开发的接触算法应用于确定不同几何形状在每个时刻的界面处的接触节点。一个焊盘被限制为固定,而所需的抓取力则由比例微分控制器施加到另一个焊盘上。研究并比较了所有三种情况下达到稳定抓握姿势所需的时间。该模型确定了抓取的瞬态和稳态界面处的接触节点和接触力。对于相同的初始抓取姿态,在圆柱盘的情况下,接触节点的数量在瞬态下随时间增加,而在椭圆盘的抓取过程中减少,对于方形块保持不变。对于不同的几何形状,软材料的变形层的图案也不同。该模型还用于控制圆柱圆盘的方向,同时在两个水平垫之间滚动圆盘。反馈比例-积分-微分控制器测量圆盘的瞬时方向,并在上垫上施加所需的水平力,以实现所需的方向控制。该模型计算用于方向控制所需的瞬时接触力。通过仿真验证了所讨论的接触算法和键图模型。
题目:Robot Grasp Synthesis Algorithms: A Survey
链接:机器人抓取合成算法:一项调查 - K.B. Shimoga,1996 (sagepub.com)
摘要:本文介绍了现有的计算算法,这些算法旨在实现自主多指机器人手的四个重要属性。这四个特性是:灵巧性、平衡性、稳定性和动态行为 必须控制多指机械手才能拥有这些特性,从而能够以类似于人手的方式自主执行复杂的任务。
实现灵巧性的现有算法主要涉及求解无约束线性规划问题,其中可以选择目标函数来表示一个或多个当前已知的灵巧度量。实现平衡的算法还构成了一个线性规划问题,其中考虑了所有手指的正性、摩擦力和关节扭矩约束,同时优化了内部抓取力。稳定性算法旨在通过求解所需的指尖阻抗来实现正的确定抓取阻抗矩阵。这个问题简化为非线性规划问题。动态行为算法确定指尖阻抗,当实现指尖阻抗时,将导致所需的动态行为。这个问题也变成了线性规划问题。
如果机械手必须获得任何或所有这些适当的连接,相应的算法应该成为手部控制系统的组成部分。这些算法在本文中统称为机器人抓取合成算法。
题目:State of the Art Robotic Grippers and Applications
链接:State of the Art Robotic Grippers and Applications (semanticscholar.org)
摘要:在本文中,我们介绍了有关机器人抓手的最新调查。在许多情况下,现代机械手的性能要优于老式机械手,因为现在的机械手更坚固、可重复性更高、速度更快。技术进步也促进了抓取各种物体的发展。这包括软织物、微机电系统和合成板。此外,更新的材料也被用于改善机械手的功能,其中包括压电材料、形状记忆合金、智能流体、碳纤维等。本文介绍了从最早的机器人抓手到抓取方法的最新发展。与其他调查报告不同的是,我们重点关注机器人抓手在工业、医疗、易碎物体和软织物抓手方面的应用。我们报告了抓取机制的新进展,并讨论了它们在不同用途中的行为。最后,我们介绍了机械手在灵活性和性能方面的未来趋势,以及它们在机器人手术、工业装配、太空探索和微操作等新兴领域的重要应用。这些进步将为机器人抓手的新趋势提供一个未来展望。
相关文章:

机器人抓取 [ 题目/摘要 ] 更新中..
题目:Robotic Grasping of Novel Objects using Visionl 链接:机器人抓取新物体 | IEEE Xplore(IEEE的Xplore) 【端到端】 摘要:我们考虑抓取新物体的问题,特别是第一次通过视觉看到的物体。抓取以前未知的…...
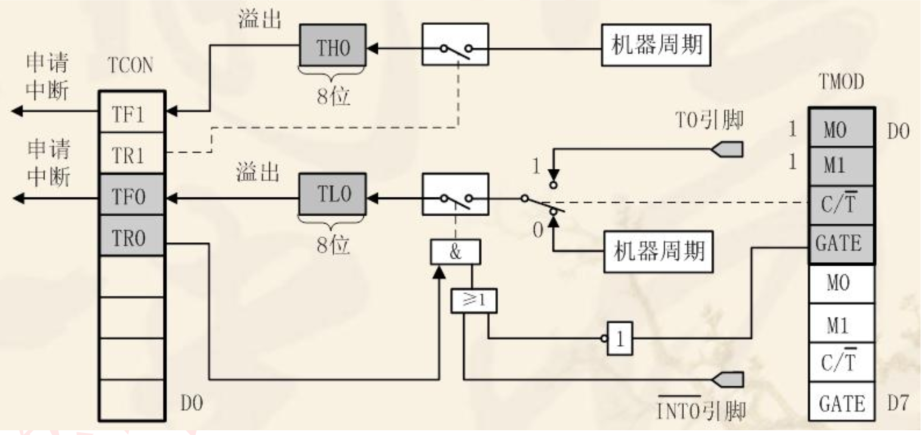
【51单片机】外部中断和定时器中断
目录 中断系统中断介绍中断概念 中断结构及相关寄存器中断结构中断相关寄存器 外部中断实验外部中断配置软件设计实验现象 定时器中断定时器介绍51 单片机定时器原理51 单片机定时/计数器结构51 单片机定时/计数器的工作方式 定时器配置硬件设计软件设计实验现象 中断系统 本章…...
零售行业供应商数据分发,怎样提高安全性和效率?
零售行业是我国经济发展的重要组成,零售行业包罗万象,如包括汽车零售、日化零售、快消品零售等,不同细分行业的运营模式各不相同,但大体来说,零售行业都具备最基础的供应商和零售商,供应商将商品或服务卖给…...
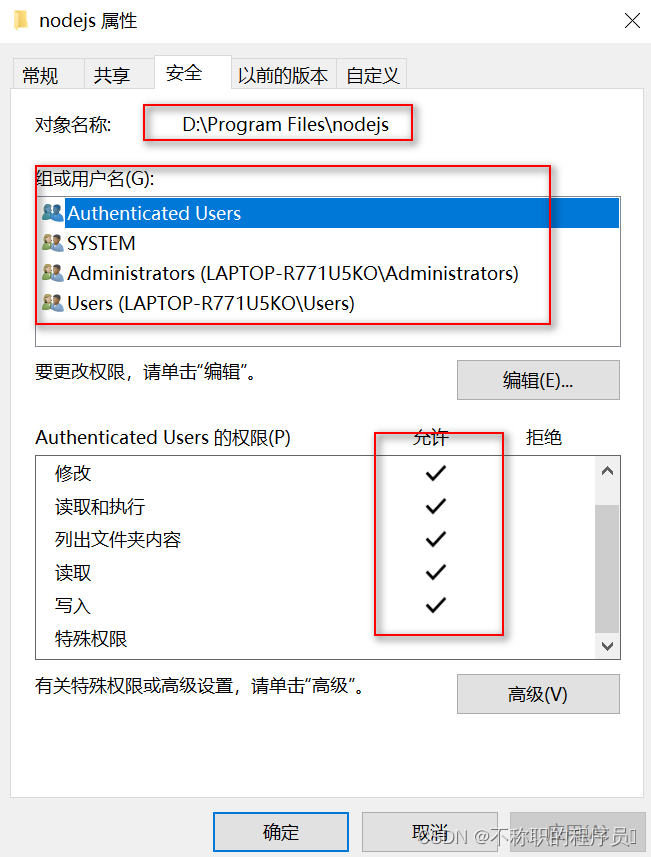
Windows下Node.js下载安装及环境变量配置教程
Windows下Node.js下载安装及环境变量配置教程 安装版本:node-v18.19.0-x64.msi 文章目录 Windows下Node.js下载安装及环境变量配置教程一、Node.js和NPM简介二、下载地址三、安装步骤四、环境配置五、安装淘宝镜像总结 一、Node.js和NPM简介 1、Node.js …...

广义表-C语言
广义表(Generalized List)是一种扩展了线性表的数据结构,它在线性表的基础上增加了元素可以是表的特点。在广义表中,元素不仅可以是单个的数据元素,还可以是一个子表,而子表中的元素也可以是数据元素或其他…...

uniapp+uView 【详解】录音,自制音频播放器
效果预览 代码实现 <template><view class"btnListBox"><view class"audioBox" v-if"audioLength"><u-row><u-col span"2"><u--text aligncenter :text"currentTime"></u--text>…...

机器学习---概率图模型(隐马尔可夫模型、马尔可夫随机场、条件随机场)
1. 隐马尔可夫模型 机器学习最重要的任务是根据已观察到的证据(例如训练样本)对感兴趣的未知变量(例如类别标 记)进行估计和推测。概率模型(probabilistic model)提供了一种描述框架,将描述任…...

cool 框架 node 后端封装三方Api post请求函数
1.需求 现在一些数据源 ,需要从三方地址拿到一些数据 比如说电影列表 信息了 影院列表信息了 等一些展示的数据,但是人家这种东西 害需要使用 appkey appserect 这种验签 这种需求 你前端调用接口是直接调用不了的 因为需要用到验签 需要后端接口转接一…...
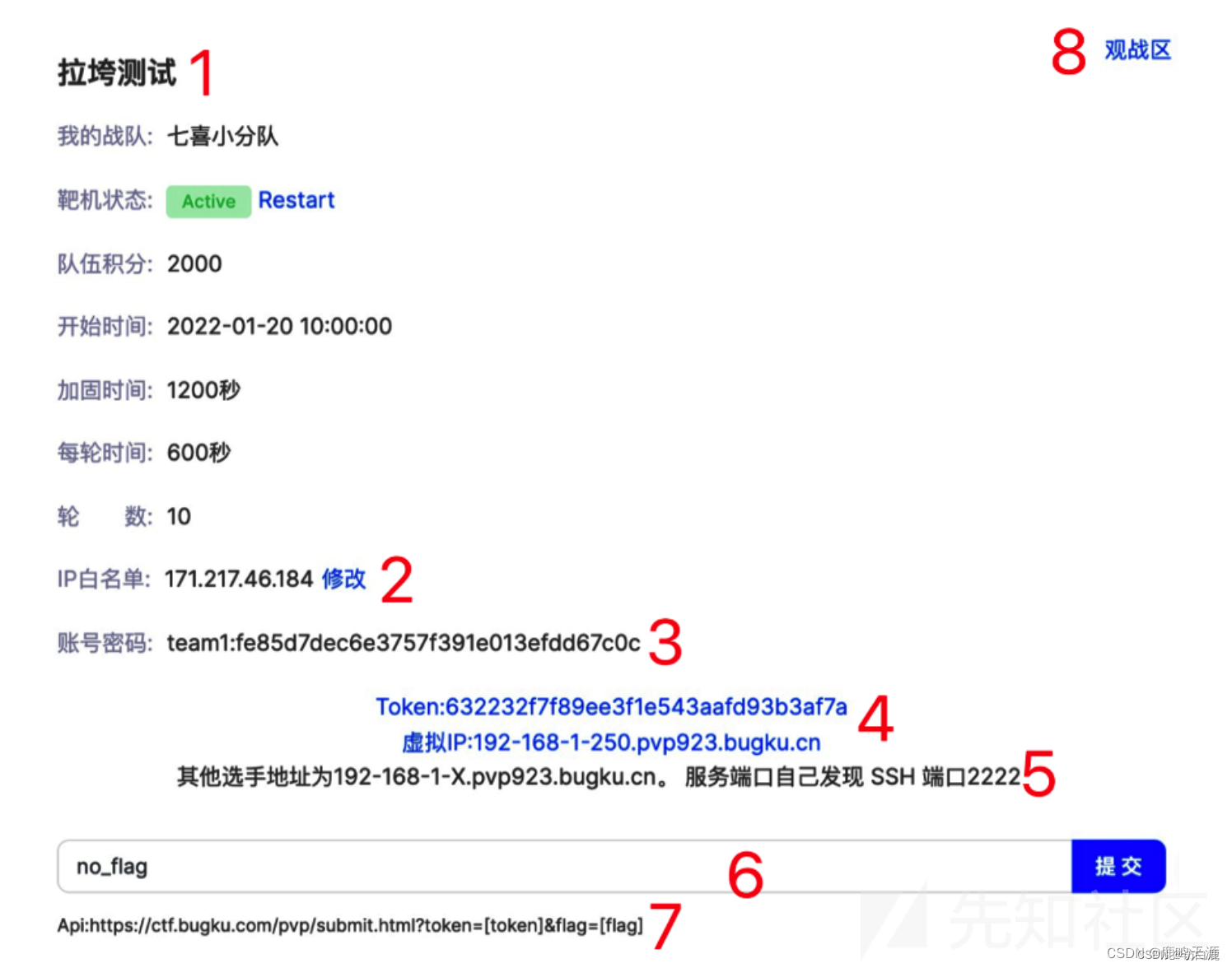
awd总结
总结: 由于是第一次参加AWD比赛,各方面经验都不足,在参赛的前几天也是疯狂搜集各种脚本、框架、工具等,同时也参考b站的视频进行学习,我发现就是还是实操才能更快的学习 我觉得就是我前期的准备工作不足,…...

【react】react+es6+antd5.13.2+ts,antd表格的操作如何在父组件写?
reactes6antd5.13.2ts,antd表格的操作如何在父组件写? 我的子组件columns.tsx,只加表头,操作放在父组件。 columns.tsx的代码: export const dataColumns [{title: 项目成员,dataIndex: name,key: name,},{title: 可选账号,alig…...

virtio笔记
最近在看虚拟化相关的东西,以virtio-console为例,记录下。 此文只是学习笔记,文中肯定有不少错误,不要参考 devicemd侧: virtio_console.c中,初始化会对port->cb赋值为 viritio_console_control_tx&am…...

初始web服务器(并基于idea来实现无需下载的tomcat)
前言 前面学习了对应的http协议,我们知道了他是在网络层进行数据传输的协议,负责相应数据以及接收数据的规则,但是在人员开发后端的时候不仅仅需要你写io流进行数据传输,还需要你进行对应的tcp协议来进行数据打包发送http协议-CSD…...
软件文档测试
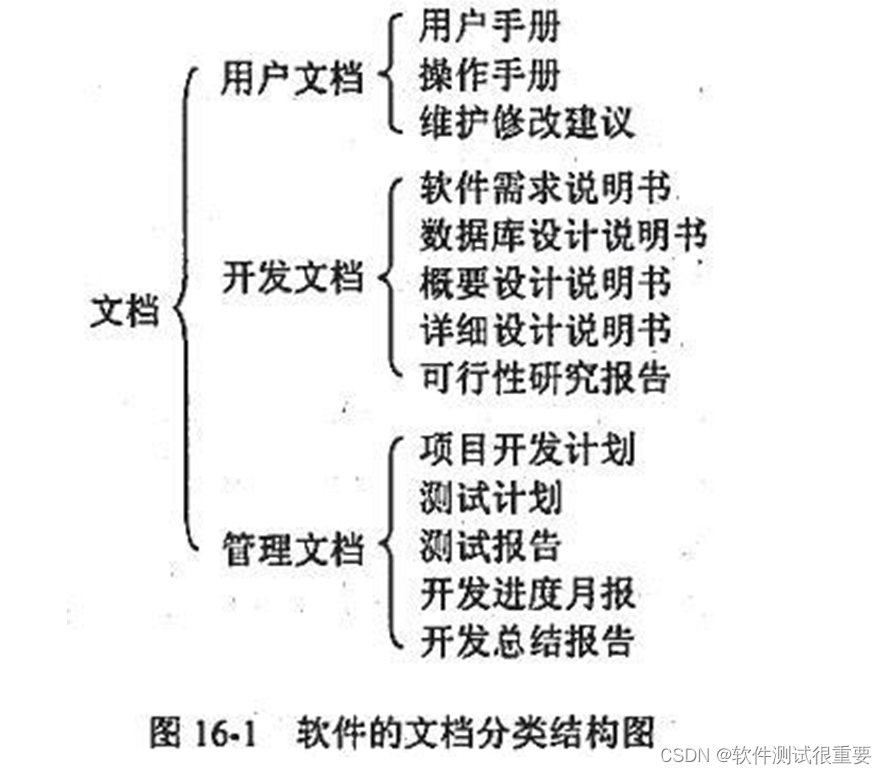
1 文档测试的范围 软件产品由可运行的程序、数据和文档组成。文档是软件的一个重要组成部分。 在软件的整人生命周期中,会用到许多文档,在各个阶段中以文档作为前阶段工作成果的体现和后阶段工作的依据。 软件文档的分类结构图如下图所示: …...
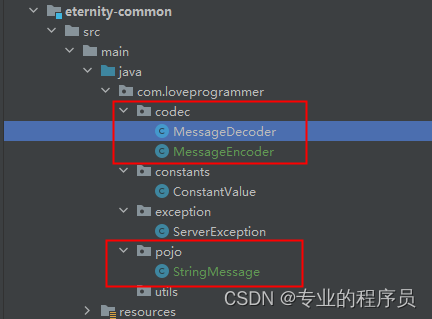
从零开始手写mmo游戏从框架到爆炸(七)— 消息封装
导航:从零开始手写mmo游戏从框架到爆炸(零)—— 导航-CSDN博客 上一篇,我们初步把消息handler 注册到了服务中,在进行后续工作之前我们需要再做一些准备工作。 第一:把之前自己管理的bean放到spring中…...
)
从Unity到Three.js(画线组件line)
JavaScript 0基础,只是照着官方文档临摹了下,之后有时间再进行细节学习和功能封装。 import * as THREE from three; //引入threejsconst renderer new THREE.WebGLRenderer();//创建渲染器 //设置渲染范围,当前撑满全屏,屏幕左上角是&…...
)
LCP 30. 魔塔游戏 - 力扣(LeetCode)
题目描述 小扣当前位于魔塔游戏第一层,共有 N 个房间,编号为 0 ~ N-1。每个房间的补血道具/怪物对于血量影响记于数组 nums,其中正数表示道具补血数值,即血量增加对应数值;负数表示怪物造成伤害值,即血量减…...
数据结构——单向链表和双向链表的实现(C语言版)
目录 前言 1. 链表 1.1 链表的概念及结构 1.2 链表的分类 2. 单链表接口实现 2.1 数据结构设计与接口函数声明 2.2 创建结点,打印,查找 2.3 尾插,头插,尾删,头删 2.4 插入或删除 2.4.1在指定位置后 2.4.2在…...
(4)——4.使用TCP的协议有哪些?使用UDP的协议有哪些?)
TCP和UDP相关问题(重点)(4)——4.使用TCP的协议有哪些?使用UDP的协议有哪些?
4.使用TCP的协议有哪些?使用UDP的协议有哪些? 使用TCP的协议有:HTTP3.0之前的HTTP协议、HTTPS、FTP、SMTP、SSH... 使用UDP的协议有:HTTP3.0、DNS、DHCP......
Python进阶--爬取美女图片壁纸(基于回车桌面网的爬虫程序)
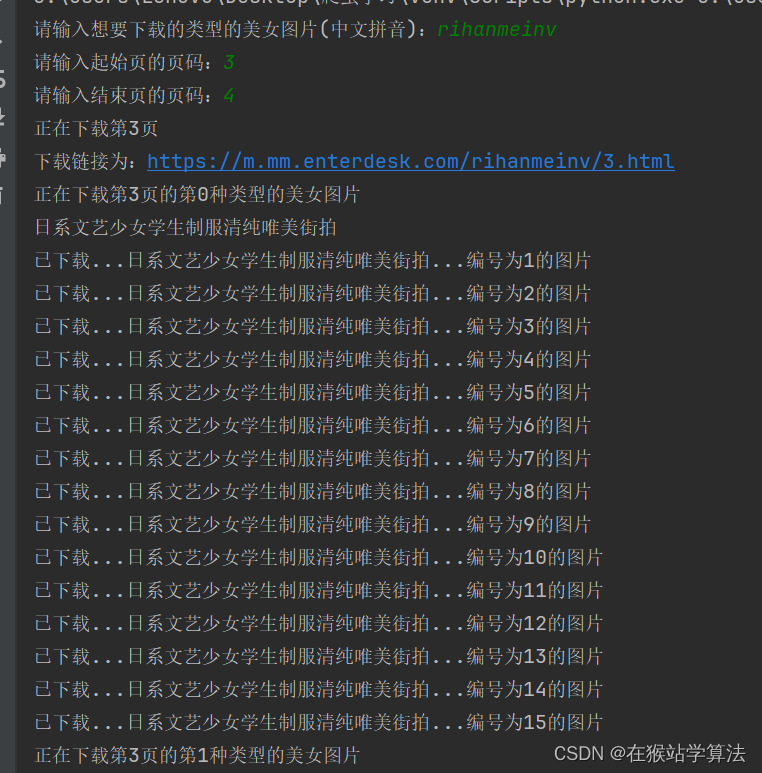
目录 一、前言 二、爬取下载美女图片 1、抓包分析 a、分析页面 b、明确需求 c、抓包搜寻 d、总结特点 2、编写爬虫代码 a、获取图片页网页源代码 b、提取所有图片的链接和标题 c、下载并保存这组图片 d、 爬取目录页的各种类型美女图片的链接 e、实现翻页 三、各…...
[office] excel如何计算毛重和皮重的时间间隔 excel计算毛重和皮重时间间隔方法 #笔记#学习方法
excel如何计算毛重和皮重的时间间隔 excel计算毛重和皮重时间间隔方法 在日常工作中经常会到用excel,有时需要计算毛重和皮重的时间间隔,具体的计算方式是什么,一起来了解一下吧 在日常工作中经常会到用excel,在整理编辑过磅数据…...

从芯片接口时序谈起:手把手教你用set_input_delay给FPGA/ASIC的输入端口‘建模’
从芯片接口到时序约束:系统级视角下的set_input_delay实战解析 在数字芯片设计中,接口时序约束是连接芯片内部逻辑与外部物理世界的关键桥梁。当我们面对一个DDR内存控制器或高速SPI传感器接口时,如何确保芯片能够准确捕获来自外部器件的数据…...

互联网大厂 Java 求职者面试:音视频场景下的技术挑战
互联网大厂 Java 求职者面试:音视频场景下的技术挑战在一次互联网大厂的面试中,面试官和候选人燕双非之间展开了一场精彩的对话。燕双非是一位幽默风趣的程序员,尽管他在技术上并不是特别扎实,但他总是能用他的幽默化解紧张氛围。…...
C166架构_testclear_函数原理与应用解析
1. C166开发中的_testclear_函数使用解析在嵌入式C166架构开发过程中,开发人员经常会遇到一些编译器特有的内置函数(intrinsic functions)使用问题。其中_testclear_函数就是一个典型的例子,它用于原子性地测试并清除某个内存位置的值。最近我在调试一个…...

LeetCode 找到最终的安全状态题解
LeetCode 找到最终的安全状态题解 题目描述 给定一个有向图,找到所有安全节点。安全节点是永远不会走向环的节点。 示例: 输入:graph [[1,2],[2,3],[5],[0],[5],[],[]]输出:[2,4,5,6] 解题思路 方法:拓扑排序 思路&am…...

Agent+用药提醒:真正难的不是提醒,而是结合病情和依从性管理
用药提醒如果只做成定时推送,本质上接近一个带药品名称的闹钟。医疗健康应用里更棘手的问题是:用户是否按计划执行、漏服后如何记录、连续异常时是否需要升级提醒,以及这些规则如何被机构确认并可审计。本文只讨论技术架构和工程流程示例&…...

视听融合新范式!黎阳之光打破视觉边界,声影协同赋能全域智慧管控
长久以来,图形图像可视化技术早已成为智慧安防、低空管控、工业监测领域的主流应用,依托高清视频、三维实景、数字孪生图形图像能力,实现场景直观呈现、目标可视追踪、环境全景复刻,为各行各业搭建起可视化智慧管理体系。深耕图形…...

A-59F所有应用模式说明
A-59F 是一款高集成语音处理模组,一体化实现 AI ENC 降噪、AEC 回音消除、扩音防啸叫、BF 波束拾音 四大核心能力。支持模拟 / 数字麦克风、模拟 / I2S 数字音频接口,邮票孔 SMT 封装,体积小巧、易嵌入,可大幅简化音频电路&#x…...

3分钟快速找回:手机号查QQ号Python工具完整指南
3分钟快速找回:手机号查QQ号Python工具完整指南 【免费下载链接】phone2qq 项目地址: https://gitcode.com/gh_mirrors/ph/phone2qq 你是否曾因为忘记QQ号而无法登录?或者换了新手机后,只记得手机号却找不到对应的QQ账号?…...

告别Nginx配置!用miniserve在Windows/Mac/Linux三分钟内搞定文件共享
告别Nginx配置!用miniserve在Windows/Mac/Linux三分钟内搞定文件共享 你是否曾在团队协作时,为了快速分享一个安装包或设计稿,不得不忍受FTP的繁琐配置?或是被Nginx的虚拟主机设置搞得头晕目眩?现在,这一切…...

深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史
深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史 当你在Keil5环境下打开一个遗留的单片机项目时,那个看似微不足道的#1295-D: Deprecated declaration警告可能正暗示着一段跨越四十年的编程语言进化史。这个关于函数声明的警告不是Keil5的任…...