“智能检测,精准把控。温湿度检测系统,为您的生活带来全方位的健康保障。”#非标协议项目【上】
“智能检测,精准把控。温湿度检测系统,为您的生活带来全方位的健康保障。”#非标协议项目【上】
- 前言
- 预备知识
- 1温湿度检测系统需求
- 2.代码整合
- 2.1找到`编程实现LCD1602显示一行工程`,打开`代码文件`,将所需的`LCD1602驱动代码`拷贝到`温湿度检测系统_1602显示串口发送工程`内。
- 2.2找到`串口编程03_PC发送指令控制LED`工程,打开`代码文件`,将所需的`LCD1602驱动代码`拷贝到`温湿度检测系统_1602显示串口发送工程`内。
- 2.3找到`温湿度通过串口传到PC显示`工程,打开`代码文件`,将所需的`LCD1602驱动代码`拷贝到`温湿度检测系统_1602显示串口发送工程`内。
- 3.构造DHT11温湿度数据处理函数
- 3.1定义存放`温度`的`字符数组`和存放`湿度`的`字符数组`
- 3.2在DHT11温湿度数据处理函数内将温湿度数据存入相应字符数组。
- 4.主函数调用API顺序
- 4.1延时1秒,稳定系统
- 4.2初始化串口
- 4.3初始化LCD1602
- 4.4延时2秒,稳定DHT11模块
- 4.5在`while(1)`死循环内调用延时一秒函数,实现每隔1秒刷新温湿度数据
- 4.6在`while(1)`死循环内调用读取DHT11温湿度函数
- 4.7在`while(1)`死循环内调用DHT11温湿度数据处理函数
- 4.8在`while(1)`死循环内多次调用发送字符串函数,实现向PC发送温湿度数据
- 4.9在`while(1)`死循环内多次调用LCD1602显示一行字符函数,实现在LCD1602上显示温湿度数据
- 5.完整工程代码
- 6项目运行结果
- 结束语
前言
本篇博文介绍的是用51单片机的非标准写协议项目温湿度检测系统【上】,包含温湿度检测系统需求,代码整合,构造DHT11温湿度数据处理函数,主函数调用API顺序,完整工程代码,项目运行结果。看到这篇博文的朋友,可以先赞再看吗?
预备知识
一、基本电路标识识别和接线,例如VCC,GND。
二、电脑基本操作复制粘贴
三、C变量
四、基本输入输出
五、流程控制
六、函数
七、指针
八,字符串
如果以上知识不清楚,请自行学习后再来浏览。如果我有没例出的,请在评论区写一下。谢谢啦!
1温湿度检测系统需求
- 能够实时通过51单片机串口发送温湿度信息
- 能够实时通过51单片机驱动LCD1602显示温湿度信息
2.代码整合
2.1找到编程实现LCD1602显示一行工程,打开代码文件,将所需的LCD1602驱动代码拷贝到温湿度检测系统_1602显示串口发送工程内。
- LCD1602 IO口定义代码
//数据线定义
//D0到D7 -- P0.1到P0.7
#define dataBuffer P0//控制线定义
/*
RS--P1.0
RW--P1.1
EN--P1.4
*/
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;
- LCD1602初始化必要延时代码
void Delay15ms() //@11.0592MHz
{unsigned char i, j;i = 27;j = 226;do{while (--j);} while (--i);
}void Delay5ms() //@11.0592MHz
{unsigned char i, j;i = 9;j = 244;do{while (--j);} while (--i);
}
- 检测LCD1602忙代码
void checkBusy()
{char tmp = 0x80;dataBuffer = 0x80;while(tmp & 0x80) //只要dataBuffer中的第8位为1就为忙,因为BF:为忙标志位,高电平表示忙,此时模块不能接收命令或者数据,如果为低电平表示不忙。{RS = 0; //根据手册中指令表可知RS=0,RW=1RW = 1; //RW=1为读的操作,所以需要配置读的时序图EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高EN = 1; //根据手册中的读时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();tmp = dataBuffer; //读取dataBuffer中的忙信号EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平}
}
- 向LCD1602写地址也就是指令代码和写数据代码
void writeCmd(char cmd)
{ checkBusy(); //检测忙信号RS = 0; //RS等于零,是写指令操作RW = 0; //RW在手册中写的时序图是可以全程低电平EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高dataBuffer = cmd; //根据手册中的写时序图,数据在EN还在低电平时就建立数据EN = 1; //根据手册中的写时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平
}void weiteData(char cData)
{checkBusy(); //检测忙信号RS = 1; //RS等于1,是写数据操作RW = 0; //RW在手册中写的时序图是可以全程低电平EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高dataBuffer = cData; //根据手册中的写时序图,数据在EN还在低电平时就建立数据EN = 1; //根据手册中的写时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平
}
- 初始化LCD1602代码
void initLCD1602()
{
//(1) 延时 15msDelay15ms();
//(2) 写指令 38H(不检测忙信号)writeCmd(0x38);
//(3) 延时 5msDelay5ms();
//(4) 以后每次写指令,读/写数据操作均需要检测忙信号
//(5) 写指令 38H:显示模式设置writeCmd(0x38);
//(6) 写指令 08H:显示关闭writeCmd(0x08);
//(7) 写指令 01H:显示清屏writeCmd(0x01);
//(8) 写指令 06H:显示光标移动设置writeCmd(0x06);
//(9) 写指令 0CH:显示开及光标设置writeCmd(0x0C);
}
- 让LCD1602显示一行字符的代码
void LCD1602ShowARow(char line,char column,char *str)
{switch(line) //选择哪行显示{case 1: //第一行显示writeCmd(0x80 + column); //选择哪个位置显示,因为位置地址的最高位必须为1,所以0x80+列数while(*str) //判断字符串指针变量不为空执行循环,不用判断字符串结束标志{weiteData(*str); //发送字符串单个字符str++; //字符串指针变量偏移}break;case 2: //第二行显示writeCmd(0x80 + 0x40 + column); //选择哪个位置显示,因为位置地址的最高位必须为1,所以0x80+列数,又因为第二行的列从0x40开始while(*str) //所以是从0x80 + 0x40 + 列数(特别注意){ weiteData(*str);str++;}break;}
}
- 最后将以上代码整合到
温湿度检测系统_1602显示串口发送工程内。
2.2找到串口编程03_PC发送指令控制LED工程,打开代码文件,将所需的LCD1602驱动代码拷贝到温湿度检测系统_1602显示串口发送工程内。
- 串口初识化代码
void UartInit(void) //自己配
{//配置串口工作方式为方式1,从只收不发改为能收能发SCON = 0x50;//配置辅助寄存器,减少电磁辐射,稳定晶振频率 AUXR = 0x01;//设置定时器工作方式为定时器1的8位自动重装TMOD &= 0x0F;TMOD |= 0x20;//设置串口波特率为9600,0误差TH1 = 0xFD;TL1 = 0xFD;//打开定时器1TR1 = 1;
}
- 发送字节和发送字符串代码
void sendByte(char data_mas)
{SBUF = data_mas;while(!TI);TI = 0; //一定要软件置零,不然会出现乱序
}void sendString(char *str)
{while(*str != '\0'){sendByte(*str);str++;}
}
2.3找到温湿度通过串口传到PC显示工程,打开代码文件,将所需的LCD1602驱动代码拷贝到温湿度检测系统_1602显示串口发送工程内。
- 存放温湿度数据代码
char THdata[5]; //存放温湿度数据变量
- 打开DHT11高速模式和读取DHT11温湿度数据必要延时代码
void Delay30ms() //@11.0592MHz
{unsigned char i, j; i = 54;j = 199;do{while (--j);} while (--i);
}void Delay40us() //@11.0592MHz
{unsigned char i;_nop_();i = 15;while (--i);
}
- 打开DHT11高速模式代码
void startDHT()
{Data = 1;Data = 0;//至少延时18ms,那么延时30msDelay30ms();Data = 1;//检测d点while(Data);//检测e点while(!Data);//检测f点while(Data);
}
- 读取DHT11温湿度数据代码
void readDHTData()
{char i; //轮次char j; //次数char flag;char tmp;//打开DHT11高速模式startDHT();for(i=0; i<5; i++){for(j=0; j<8; j++){//检测G点while(!Data);//根据传送1和0的时间不同,0是26us,1是70us。等待60us后,如果Data = 1,就传1,Data = 0;就传0//Delay60us(); 延时60微妙太长了,可能在读0时读到下一个发送序列了,延时40微妙Delay40us();if(Data == 1){flag = 1;while(Data); //传1的时间比较久,所以要等传1结束}else{flag = 0;}tmp = tmp << 1;tmp |= flag;}THdata[i] = tmp;}
}
3.构造DHT11温湿度数据处理函数
3.1定义存放温度的字符数组和存放湿度的字符数组
char Temperature[9]; //定义温度字符数组
char Humidness[9]; //定义湿度字符数组
3.2在DHT11温湿度数据处理函数内将温湿度数据存入相应字符数组。
void THDataHandler()
{//湿度数据处理Humidness[0] = 'H';Humidness[1] = ':';Humidness[2] = THdata[0]/10 + 0x30;Humidness[3] = THdata[0]%10 + 0x30;Humidness[4] = '.';Humidness[5] = THdata[1]/10 + 0x30;Humidness[6] = THdata[1]%10 + 0x30;Humidness[7] = '%';Humidness[8] = '\0';//温度处理Temperature[0] = 'T';Temperature[1] = ':';Temperature[2] = THdata[2]/10 + 0x30;Temperature[3] = THdata[2]%10 + 0x30;Temperature[4] = '.';Temperature[5] = THdata[3]/10 + 0x30;Temperature[6] = THdata[3]%10 + 0x30;Temperature[7] = 'C';Temperature[8] = '\0';
}
4.主函数调用API顺序
4.1延时1秒,稳定系统
Delay1000ms();
4.2初始化串口
UartInit();
4.3初始化LCD1602
initLCD1602();
4.4延时2秒,稳定DHT11模块
Delay1000ms(); //等待DHT模块稳定
Delay1000ms();
4.5在while(1)死循环内调用延时一秒函数,实现每隔1秒刷新温湿度数据
Delay1000ms();
4.6在while(1)死循环内调用读取DHT11温湿度函数
readDHTData();
4.7在while(1)死循环内调用DHT11温湿度数据处理函数
THDataHandler();
4.8在while(1)死循环内多次调用发送字符串函数,实现向PC发送温湿度数据
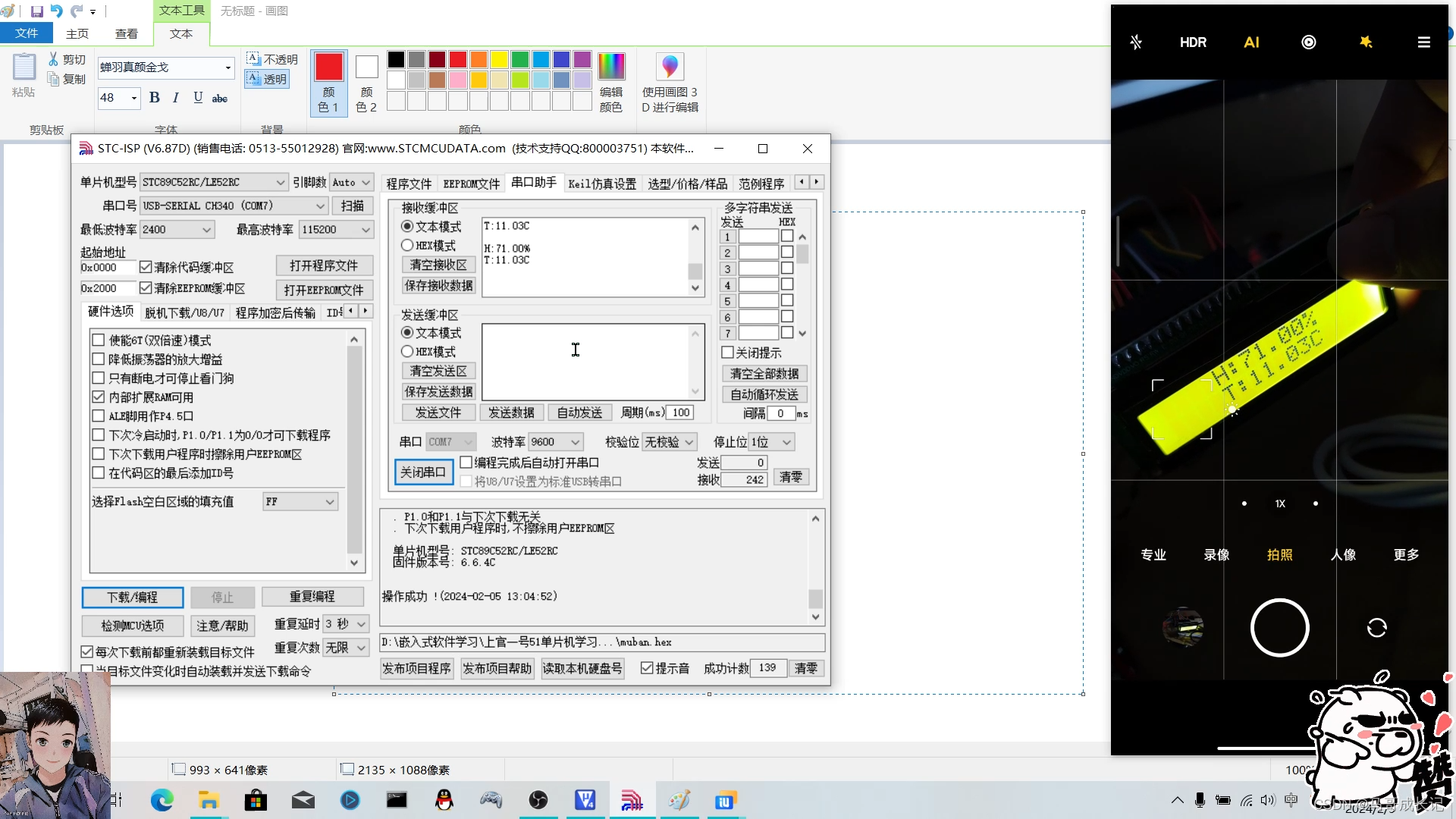
//通过串口发送温湿度数据
sendString(Humidness);
sendString("\r\n");
sendString(Temperature);
sendString("\r\n");
sendString("\r\n");
4.9在while(1)死循环内多次调用LCD1602显示一行字符函数,实现在LCD1602上显示温湿度数据
LCD1602ShowARow(1,4,Humidness);
LCD1602ShowARow(2,4,Temperature);
5.完整工程代码
#include "reg52.h"
#include "intrins.h"//数据线定义
//D0到D7 -- P0.1到P0.7
#define dataBuffer P0sbit LED1 = P3^7; //用尾定义声明LED1
sbit Data = P3^3; //把DHT11接在单片机的P1.0口
sfr AUXR = 0x8e; //声明AUXR寄存器地址//控制线定义
/*
RS--P1.0
RW--P1.1
EN--P1.4
*/
sbit RS = P1^0;
sbit RW = P1^1;
sbit EN = P1^4;char THdata[5]; //存放温湿度数据变量
char Temperature[9]; //定义温度字符数组
char Humidness[9]; //定义湿度字符数组void Delay15ms() //@11.0592MHz
{unsigned char i, j;i = 27;j = 226;do{while (--j);} while (--i);
}void Delay5ms() //@11.0592MHz
{unsigned char i, j;i = 9;j = 244;do{while (--j);} while (--i);
}void Delay30ms() //@11.0592MHz
{unsigned char i, j; i = 54;j = 199;do{while (--j);} while (--i);
}void Delay40us() //@11.0592MHz
{unsigned char i;_nop_();i = 15;while (--i);
}void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
}void checkBusy()
{char tmp = 0x80;dataBuffer = 0x80;while(tmp & 0x80) //只要dataBuffer中的第8位为1就为忙,因为BF:为忙标志位,高电平表示忙,此时模块不能接收命令或者数据,如果为低电平表示不忙。{RS = 0; //根据手册中指令表可知RS=0,RW=1RW = 1; //RW=1为读的操作,所以需要配置读的时序图EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高EN = 1; //根据手册中的读时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();tmp = dataBuffer; //读取dataBuffer中的忙信号EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平}
}void writeCmd(char cmd)
{ checkBusy(); //检测忙信号RS = 0; //RS等于零,是写指令操作RW = 0; //RW在手册中写的时序图是可以全程低电平EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高dataBuffer = cmd; //根据手册中的写时序图,数据在EN还在低电平时就建立数据EN = 1; //根据手册中的写时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平
}void weiteData(char cData)
{checkBusy(); //检测忙信号RS = 1; //RS等于1,是写数据操作RW = 0; //RW在手册中写的时序图是可以全程低电平EN = 0; //根据手册中的写时序图,EN开始为低电平_nop_(); //执行空函数等待EN拉高dataBuffer = cData; //根据手册中的写时序图,数据在EN还在低电平时就建立数据EN = 1; //根据手册中的写时序图,EN被拉高_nop_(); //执行空函数等待tpw和tF高电平过程_nop_();EN = 0; //根据手册中的写时序图,EN被拉低_nop_(); //根据手册中的写时序图,让EN保持一段时间的低电平
}void initLCD1602()
{
//(1) 延时 15msDelay15ms();
//(2) 写指令 38H(不检测忙信号)writeCmd(0x38);
//(3) 延时 5msDelay5ms();
//(4) 以后每次写指令,读/写数据操作均需要检测忙信号
//(5) 写指令 38H:显示模式设置writeCmd(0x38);
//(6) 写指令 08H:显示关闭writeCmd(0x08);
//(7) 写指令 01H:显示清屏writeCmd(0x01);
//(8) 写指令 06H:显示光标移动设置writeCmd(0x06);
//(9) 写指令 0CH:显示开及光标设置writeCmd(0x0C);
}void UartInit(void) //自己配
{//配置串口工作方式为方式1,从只收不发改为能收能发SCON = 0x50;//配置辅助寄存器,减少电磁辐射,稳定晶振频率 AUXR = 0x01;//设置定时器工作方式为定时器1的8位自动重装TMOD &= 0x0F;TMOD |= 0x20;//设置串口波特率为9600,0误差TH1 = 0xFD;TL1 = 0xFD;//打开定时器1TR1 = 1;
}void sendByte(char data_mas)
{SBUF = data_mas;while(!TI);TI = 0; //一定要软件置零,不然会出现乱序
}void sendString(char *str)
{while(*str != '\0'){sendByte(*str);str++;}
}void startDHT()
{Data = 1;Data = 0;//至少延时18ms,那么延时30msDelay30ms();Data = 1;//检测d点while(Data);//检测e点while(!Data);//检测f点while(Data);
}void LCD1602ShowARow(char line,char column,char *str)
{switch(line) //选择哪行显示{case 1: //第一行显示writeCmd(0x80 + column); //选择哪个位置显示,因为位置地址的最高位必须为1,所以0x80+列数while(*str) //判断字符串指针变量不为空执行循环,不用判断字符串结束标志{weiteData(*str); //发送字符串单个字符str++; //字符串指针变量偏移}break;case 2: //第二行显示writeCmd(0x80 + 0x40 + column); //选择哪个位置显示,因为位置地址的最高位必须为1,所以0x80+列数,又因为第二行的列从0x40开始while(*str) //所以是从0x80 + 0x40 + 列数(特别注意){ weiteData(*str);str++;}break;}
}void readDHTData()
{char i; //轮次char j; //次数char flag;char tmp;//打开DHT11高速模式startDHT();for(i=0; i<5; i++){for(j=0; j<8; j++){//检测G点while(!Data);//根据传送1和0的时间不同,0是26us,1是70us。等待60us后,如果Data = 1,就传1,Data = 0;就传0//Delay60us(); 延时60微妙太长了,可能在读0时读到下一个发送序列了,延时40微妙Delay40us();if(Data == 1){flag = 1;while(Data); //传1的时间比较久,所以要等传1结束}else{flag = 0;}tmp = tmp << 1;tmp |= flag;}THdata[i] = tmp;}
}void THDataHandler()
{//湿度数据处理Humidness[0] = 'H';Humidness[1] = ':';Humidness[2] = THdata[0]/10 + 0x30;Humidness[3] = THdata[0]%10 + 0x30;Humidness[4] = '.';Humidness[5] = THdata[1]/10 + 0x30;Humidness[6] = THdata[1]%10 + 0x30;Humidness[7] = '%';Humidness[8] = '\0';//温度处理Temperature[0] = 'T';Temperature[1] = ':';Temperature[2] = THdata[2]/10 + 0x30;Temperature[3] = THdata[2]%10 + 0x30;Temperature[4] = '.';Temperature[5] = THdata[3]/10 + 0x30;Temperature[6] = THdata[3]%10 + 0x30;Temperature[7] = 'C';Temperature[8] = '\0';
}void main()
{LED1 = 1; //一上电就让灯灭Delay1000ms();UartInit(); //初始化串口initLCD1602(); //初始化LCD1602Delay1000ms(); //等待DHT模块稳定Delay1000ms();while(1) //防止程序退出主函数,导致LED1微弱闪烁{Delay1000ms(); //间隔1秒读一次readDHTData(); //读取DHT11温湿度数据THDataHandler(); //将DHT11传回的数据装入温湿度字符数组//通过串口发送温湿度数据sendString(Humidness);sendString("\r\n");sendString(Temperature);sendString("\r\n");sendString("\r\n");LCD1602ShowARow(1,4,Humidness); LCD1602ShowARow(2,4,Temperature);}}
6项目运行结果
结束语
很高兴您能看到这里,点个赞再走呗。谢谢您啦!!!
相关文章:
“智能检测,精准把控。温湿度检测系统,为您的生活带来全方位的健康保障。”#非标协议项目【上】
“智能检测,精准把控。温湿度检测系统,为您的生活带来全方位的健康保障。”#非标协议项目【上】 前言预备知识1温湿度检测系统需求2.代码整合2.1找到编程实现LCD1602显示一行工程,打开代码文件,将所需的LCD1602驱动代码拷贝到温湿…...
牛客网SQL进阶137:第二快/慢用时之差大于试卷时长一半的试卷
官网链接: 第二快慢用时之差大于试卷时长一半的试卷_牛客题霸_牛客网现有试卷信息表examination_info(exam_id试卷ID, tag试卷类别,。题目来自【牛客题霸】https://www.nowcoder.com/practice/b1e2864271c14b63b0df9fc08b559166?tpId240 0 问题描述 试…...
CVE-2022-0760 漏洞复现
CVE-2022-0760 NSS [HNCTF 2022 WEEK2]ohmywordpress 【CVE-2022-0760】 题目描述:flag在数据库里面。 开题: 顺着按钮一直点下去会发现出现一个按钮叫安装WordPress 安装完之后的界面,有一个搜索框。 F12看看network。 又出现了这个Wor…...

WordPress突然后台无法管理问题
登录WordPress后台管理评论,发现点击编辑、回复均无反应。 尝试清除缓存、关闭CF连接均无效。 查看插件时发现关闭wp-china-yes插件可以解决问题。 后来又测试了下发现加速管理后台这项,在启用时会发生点击无效问题,禁用就好了,不…...
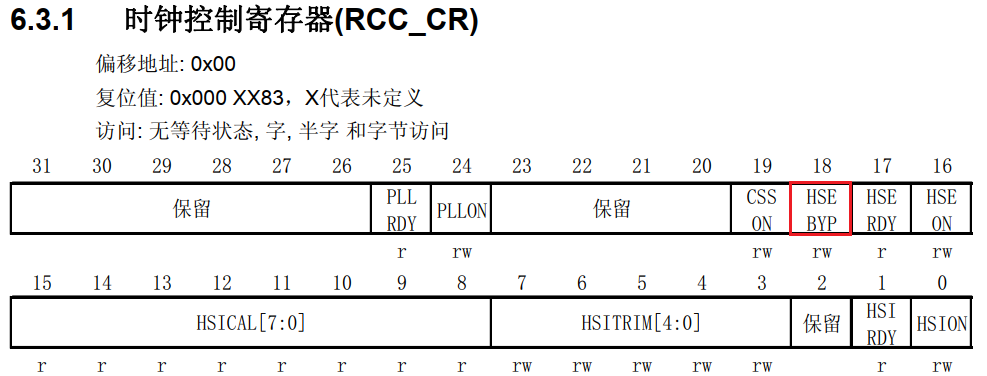
STM32F1 - 标准外设库_规范
STM32F10x_StdPeriph_Lib_V3.6.0 1> 头文件包含关系2> .c文件内部结构3> 宏定义位置4> 位掩码bit mask5> .c文件中定义私有变量6> 枚举类型定义 1> 头文件包含关系 1个头文件stm32f10x.h 就把整个MCU以及标准外设库,就管理了; 2>…...
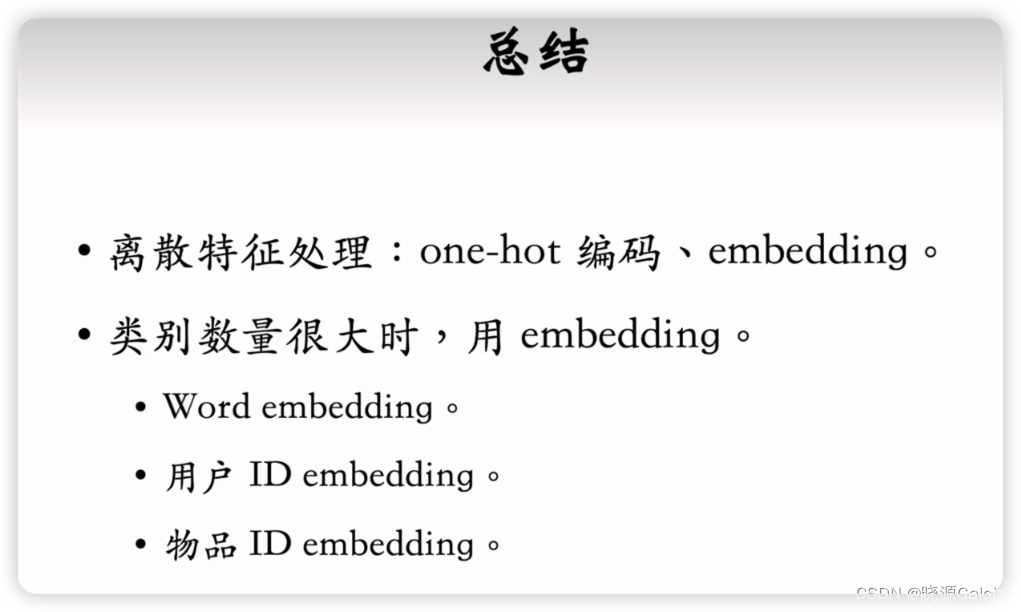
推荐系统|召回04_离散特征处理
离散特征处理 离散特征是什么 怎么处理离散特征 One-hot编码 Embedding嵌入 从one-hot到Embedding,已经节省了很多的存储空间,但当数据量大的时候,还是占空间,所以工业界仍会对Embedding进行优化 而一个物品所对应的Embedding参数…...
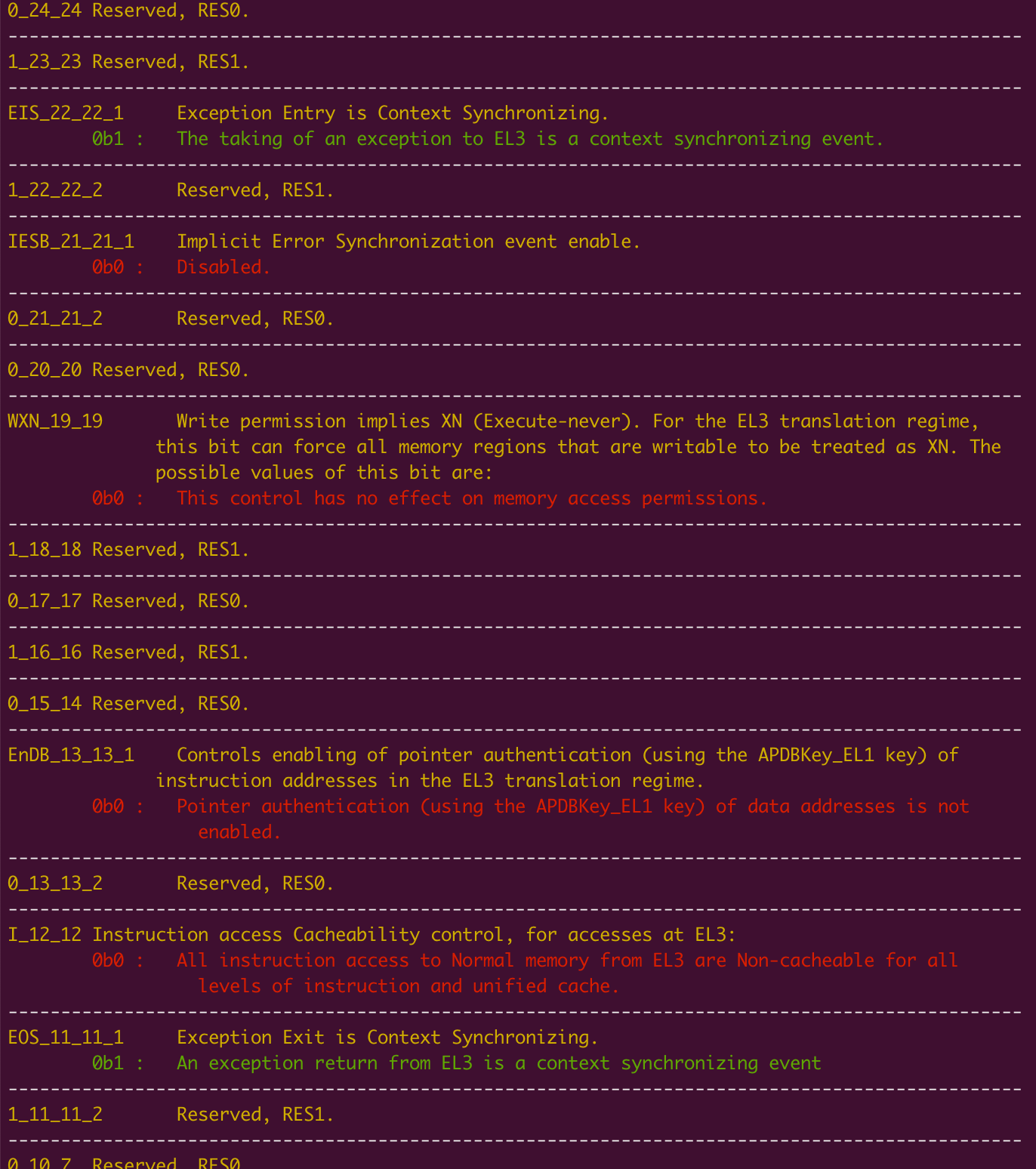
一个查看armv8系统寄存器-值-含义的方式
找到解压后的SysReg_xml_v86A-2019-12目录 wget https://developer.arm.com/-/media/developer/products/architecture/armv8-a-architecture/2019-12/SysReg_xml_v86A-2019-12.tar.gz wget https://developer.arm.com/-/media/developer/products/architecture/armv8-a-archi…...
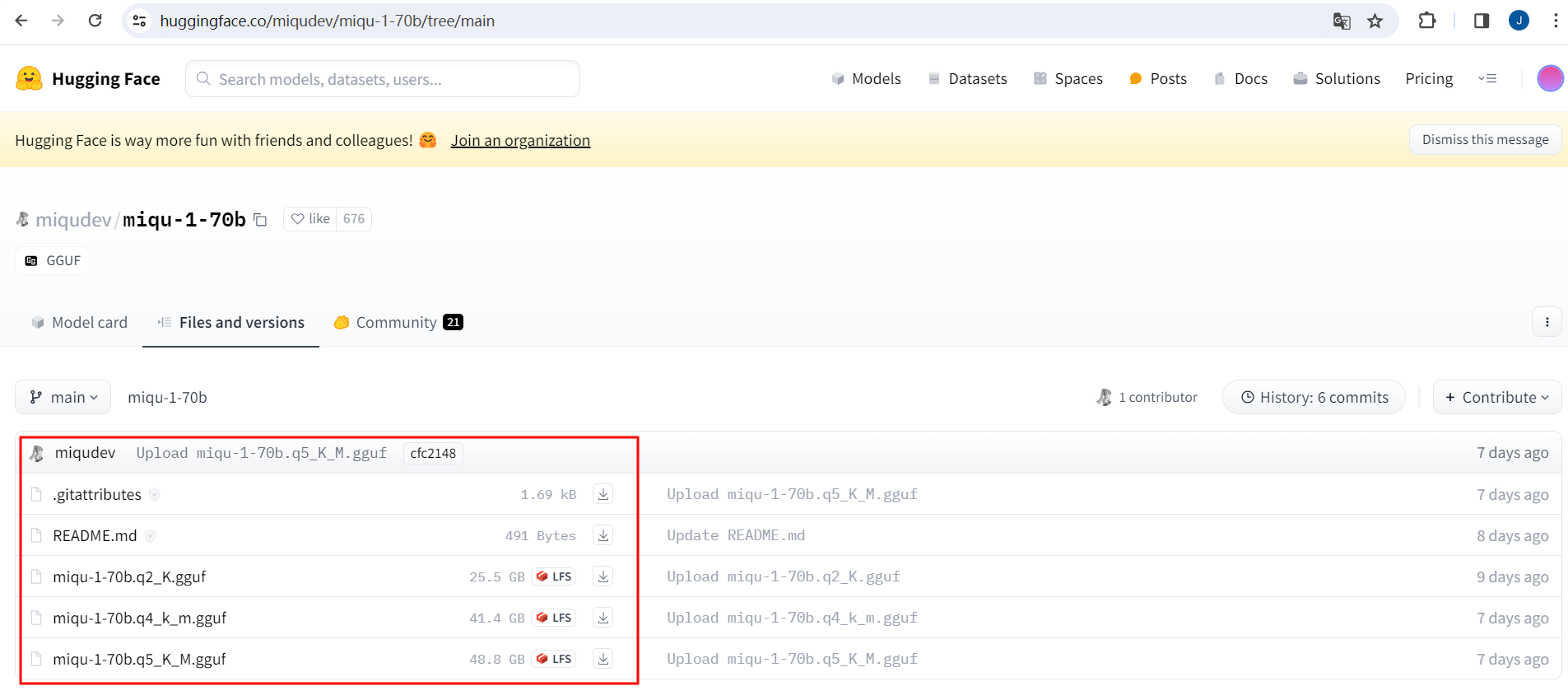
LLMs之miqu-1-70b:miqu-1-70b的简介、安装和使用方法、案例应用之详细攻略
LLMs之miqu-1-70b:miqu-1-70b的简介、安装和使用方法、案例应用之详细攻略 目录 miqu-1-70b的简介 miqu-1-70b的安装和使用方法 1、安装 2、使用方法 miqu-1-70b的案例应用 miqu-1-70b的简介 2024年1月28日,发布了miqu 70b,潜在系列中的…...
npm 下载报错
报错信息 : 证书过期 (CERT_HAS_EXPIRED) D:\Apps\nodejs-v18.16.1\npx.cmd --yes create-next-app"latest" . --ts npm ERR! code CERT_HAS_EXPIRED npm ERR! errno CERT_HAS_EXPIRED npm ERR! request to https://registry.npm.taobao.org/create-next-app failed…...

GPT-4登场:多模态能力革新,提升ChatGPT与必应体验,开放API助力游戏革新
GPT-4登场:多模态能力革新,提升ChatGPT与必应体验,开放API助力游戏革新 引言 在人工智能领域,GPT-4的发布标志着一个新时代的到来。这一多模态大模型不仅在技术性能上实现了飞跃,更在功能层面带来全新的突破。GPT-4的…...
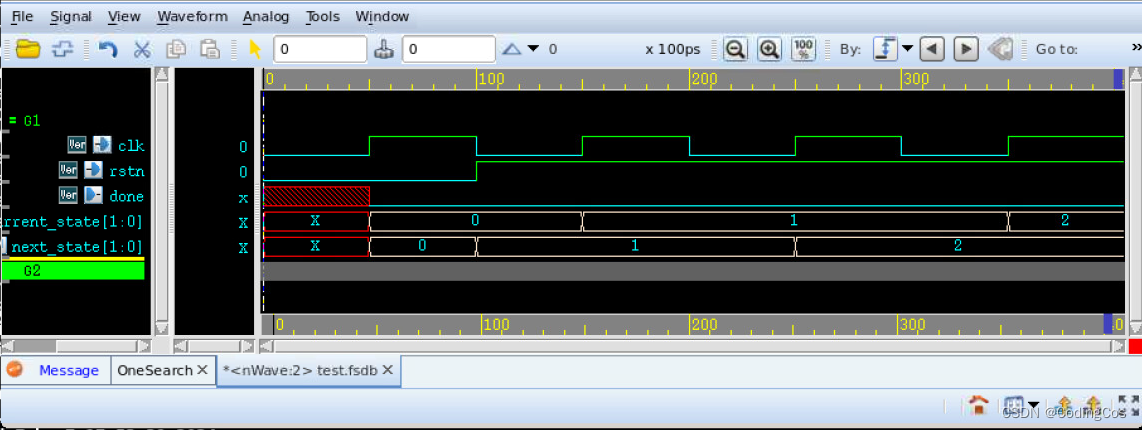
【芯片设计- RTL 数字逻辑设计入门 11.1 -- 状态机实现 移位运算与乘法 1】
文章目录 移位运算与乘法状态机简介SystemVerilog中的测试平台VCS 波形仿真 阻塞赋值和非阻塞赋值有限状态机(FSM)与无限状态机的区别 本篇文章接着上篇文章【芯片设计- RTL 数字逻辑设计入门 11 – 移位运算与乘法】 继续介绍,这里使用状态机…...
)
MongoDB系列:管道操作:聚合阶段操作符(二)
MongoDB系列:管道操作:聚合阶段操作符(二) 聚合阶段操作符介绍 本节只编写了个人认为可能用到的操作符,详细更多的操作符以及使用注意事项请前往MongoDB官网。 $match 过滤匹配数据。 // 插入数据 db.orders.inse…...

C++ //练习 5.12 修改统计元音字母的程序,使其能统计以下含有两个字符的字符序列的数量:ff、fl和fi。
C Primer(第5版) 练习 5.12 练习 5.12 修改统计元音字母的程序,使其能统计以下含有两个字符的字符序列的数量:ff、fl和fi。 环境:Linux Ubuntu(云服务器) 工具:vim 代码块 /****…...
C语言-----自定义类型-----结构体枚举联合
结构体和数组一样,都是一群数据的集合,不同的是数组当中的数据是相同的类型,但是结构体中的数据类型可以不相同,结构体里的成员叫做成员变量 结构体类型是C语言里面的一种自定义类型,我们前面已经了解到过int,char,fl…...
elasticsearch下载及可视化工具下载使用
elasticsearch下载及配置、启动 一、下载 Download Elasticsearch | Elastic 二、启动 双击bat即可。 出现如下说明启动成功: 访问测试: 三、注意 (1)因为es启动默认端口是:9200,所以需要检查此端口是否被占用。…...
vim常用命令以及配置文件
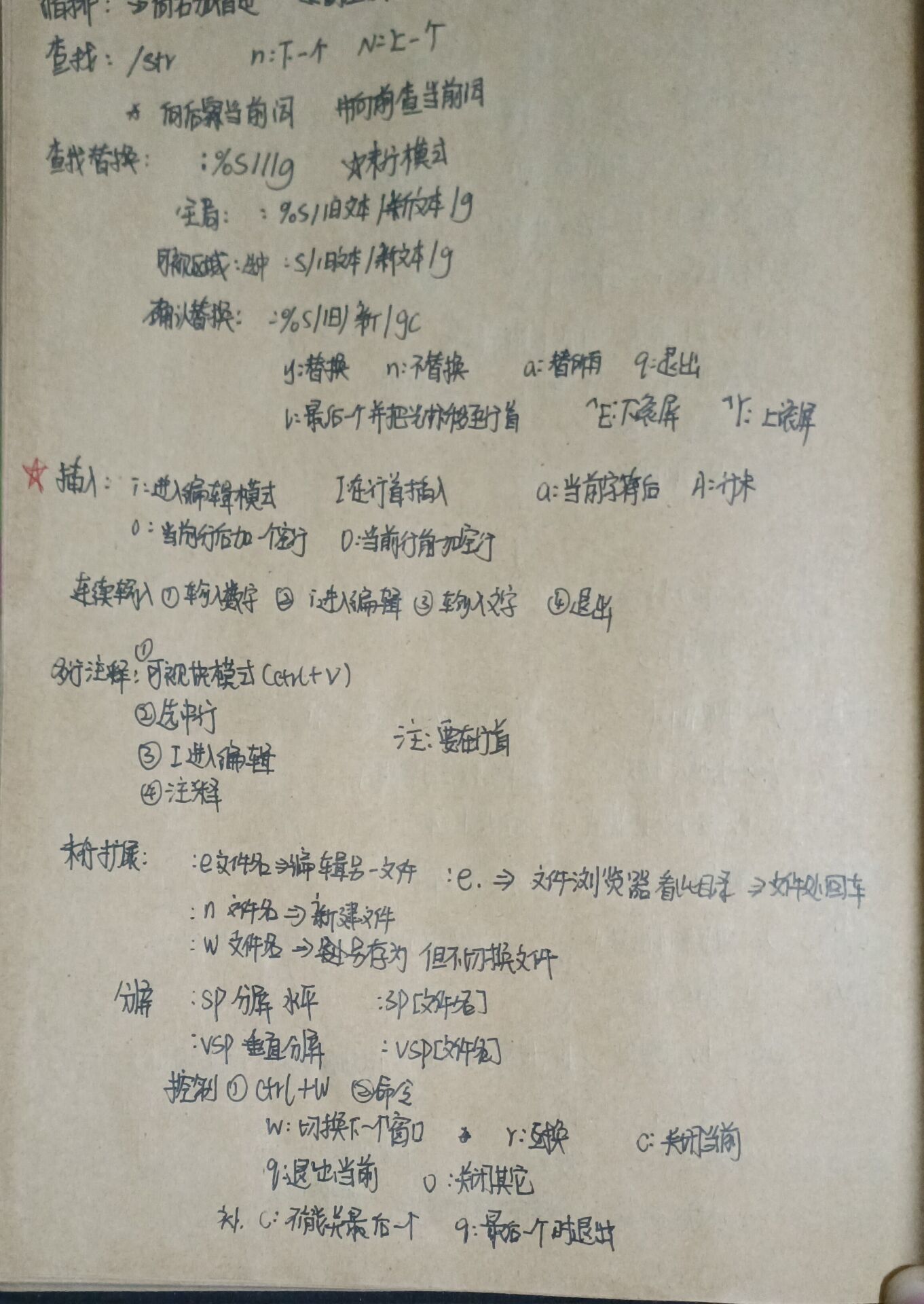
layout: article title: “vim文本编译器” vim文本编辑器 有三种模式: 命令模式 文本模式, 末行模式 vim命令大全 - 知乎 (zhihu.com) 命令模式 插入 i: 切换到输入模式,在光标当前位置开始输入文本。 a: 进入插入模式,在光标下一个位置开始输入文…...

2024年的VUE2下的无效指令npm install --save vue-i18n
vue官网已经声明了不再维护vue2, vue-i18n安装依赖的时候就只接安装vue3的vue-i18, 直接报错: > npm install --save vue-i18n npm ERR! code ERESOLVE npm ERR! ERESOLVE unable to resolve dependency tree npm ERR! npm ERR! While resolving: yudao-ui-admin…...

计算机视觉主要知识点
计算机视觉是指利用计算机和算法来解析和理解图片和视频中的内容。这是一个跨学科领域,融合了计算机科学、图像处理、机器学习和模式识别等多方面的技术。以下是一些计算机视觉入门的基本知识点: 图像基础: 像素:图片的最基本组成…...
python 基础知识点(蓝桥杯python科目个人复习计划35)
今日复习计划:阶段总结(新年贺礼) 1.python简介(定义,优点,缺点,应用领域) python:一种广泛使用的解释型,高级和通用的编程语言 python极简,生…...

使用HTML、CSS和JavaScript来创建一个粒子效果,粒子会跟随鼠标点击位置生成
文章目录 一、粒子效果二、JavaScript三、HTML四、CSS五、热门文章 一、粒子效果 以下是一个简单的示例,使用HTML、CSS和JavaScript来创建一个粒子效果,粒子会跟随鼠标点击位置生成: <!DOCTYPE html> <html> <head><t…...

用Python lifetimes库实战:手把手教你用BG/NBD+Gamma-Gamma模型预测电商用户未来3个月价值
用Python lifetimes库实战:电商用户价值预测的极简指南 电商行业的核心挑战之一是如何精准识别高价值用户。想象一下,你手头有一份过去12个月的交易数据,老板要求你在下周的预算会议前,预测未来三个月哪些用户最值得投入营销资源。…...
)
手把手教你用TMS320F2803x DSP实现PMBus通信(附代码下载与避坑指南)
TMS320F2803x DSP实战:PMBus通信从零搭建到波形调试全攻略 1. 工程搭建与开发环境配置 在开始PMBus通信开发前,需要准备完整的软硬件环境。以下是基于TI C2000系列DSP的典型配置流程: 硬件准备清单: TMS320F2803x开发板࿰…...
:大数据时代与数据挖掘概述)
《数据挖掘》读书笔记系列(一):大数据时代与数据挖掘概述
---title: 《数据挖掘》读书笔记系列(一):大数据时代与数据挖掘概述categories: 数据挖掘tags: 数据挖掘, 机器学习, 读书笔记cover: ---## 📚 关于本书> **书名**:《数据挖掘》 > **作者**:吕欣>…...

植物树枝叶片果实检测数据集7220张VOC+YOLO格式
植物树枝叶片果实检测数据集7220张VOCYOLO格式数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):7220 标注数量(xml文件个数):7220…...
)
NotebookLM期刊推荐矩阵(含影响因子、APC费用、AI政策条款、平均一审周期——仅限本周开放下载)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM期刊推荐矩阵(含影响因子、APC费用、AI政策条款、平均一审周期——仅限本周开放下载) NotebookLM 作为 Google 推出的 AI 增强型研究协作者,近期正式开放其…...

Linux内核PCIe热插拔驱动开发实战:从IDT芯片到稳定运行
1. 项目概述与核心价值最近在搞一个嵌入式设备项目,需要实现PCIe设备的热插拔支持。这玩意儿在服务器、存储阵列和工业控制领域太常见了,但真要在Linux内核里把它做稳定、做可靠,里面的门道可不少。我这次折腾的,就是一个基于Linu…...

OctoBase源码解析:深入理解Rust实现的本地优先数据库引擎 [特殊字符]
OctoBase源码解析:深入理解Rust实现的本地优先数据库引擎 🐙 【免费下载链接】OctoBase 🐙 OctoBase is the open-source database behind AFFiNE, local-first, yet collaborative. A light-weight, scalable, data engine written in Rust.…...

多智能体会被“单强模型”取代吗:从系统复杂度看真实趋势
标题:多智能体会被“单强模型”取代吗:从系统复杂度看真实技术演化趋势 关键词:多智能体系统、通用人工智能、大语言模型、系统复杂度、涌现性、任务分解、AI范式演化 摘要:2024年以来,GPT-4o、Claude 3 Opus等单一大模型的通用能力边界持续突破,不少开发者发现此前需要…...

完整教程:DIY-Multiprotocol-TX-Module固件编译与烧录
完整教程:DIY-Multiprotocol-TX-Module固件编译与烧录 【免费下载链接】DIY-Multiprotocol-TX-Module Multiprotocol TX Module (or MULTI-Module) is a 2.4GHz transmitter module which controls many different receivers and models. 项目地址: https://gitco…...

告别文献混乱!Mendeley保姆级入门指南:从安装、导入到Word引用,一篇搞定
Mendeley科研文献管理全流程实战:从零搭建高效学术工作流 刚踏入科研领域的研究生们,往往会被海量文献淹没——下载的PDF散落各处,引用格式五花八门,重复阅读相同文献却找不到重点。这种混乱不仅消耗时间,更会打断研究…...