VTK 三维场景的基本要素(相机) vtkCamera
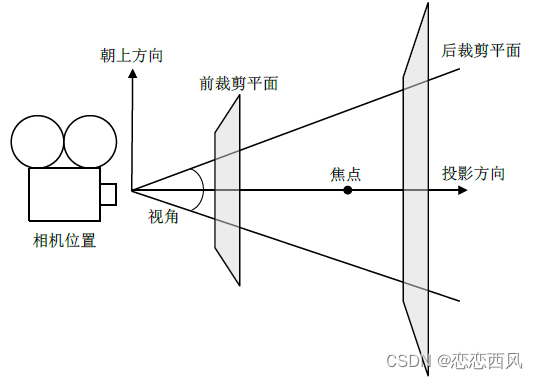
观众的眼睛好比三维渲染场景中的相机,在VTK中用vtkCamera类来表示。vtkCamera负责把三维场景投影到二维平面,如屏幕,相机投影示意图如下图所示。
1.与相机投影相关的要素主要有如下几个:
1)相机位置:
相机所处的位置,用vtkCamera::SetPosition()方法设置。
2)相机焦点:
用vtkCamera::SetFocusPoint()方法设置,默认的焦点位置在世界坐标系的原点。
3)朝上方向:
朝上方向即哪个方向为相机朝上的方向。就好比直立看东西,方向为头朝上,看到的东西也是直立的,如果倒立看某个东西,这时方向头朝下,看到的东西就是倒立的。相机位置、相机焦点和朝上方向三个因素确定了相机的实际方向,即确定相机的试图。
4)投影方向:
相机位置到相机焦点的向量方向即为投影方向。
5)投影方法: 该要素用于确定Actor是如何映射到像平面的。
vtkCamera定义了两种投影方法:
一种是正交投影(Orthographic Projection),也叫平行投影(Parallel Projection),即进入相机的光线与投影方向是平行的;
另一种是透视投影(Perspective Projection),即所有光线相较于一点。该投影方法最符合人类眼睛对于景物所产生的近大远小的视觉习惯。
6)视角:
透视投影时需要指定相机的视角(View Angle),默认的视角大小为30°,可以用vtkCamera::SetViewAngle()方法设置。
7)前后裁剪平面:
裁剪平面与投影方向相交,一般与投影方向也是垂直的。裁剪平面主要用于评估Actor与相机距离的远近,只有在前后裁剪平面之间的Actor才是可见的。裁剪平面的位置可以用vtkCamera::SetClippingRange()方法设置。
相机的视野范围是一个锥状体; 相机位置和焦点位置定义了相机的位置和投影方向,前裁剪平面与后裁剪平面 之间为可见区域;
相机坐标
相机所在的位置坐标;
void SetPosition(double x, double y, double z);void SetPosition(const double a[3]) { this->SetPosition(a[0], a[1], a[2]); }vtkGetVector3Macro(Position, double);相机焦点
相机焦点所在的位置坐标;
void SetFocalPoint(double x, double y, double z);void SetFocalPoint(const double a[3]) { this->SetFocalPoint(a[0], a[1], a[2]); }vtkGetVector3Macro(FocalPoint, double);通过设置相机焦点与相机坐标的距离,来移动焦点坐标,注意:设置的值必须为正值。
void SetDistance(double);
vtkGetMacro(Distance, double); 朝上方向
使用SetViewUp设置相机的朝上方向;
一般默认朝上方向是Y轴正向:(0,1,0);
修改相机的朝上方向,可以实现相机绕XYZ轴旋转的功能;
一般情况都是写0或者1,如果是斜着旋转,就要输入0-1范围内的小数,大家可以动手自己实验一下;
void SetViewUp(double vx, double vy, double vz);void SetViewUp(const double a[3]) { this->SetViewUp(a[0], a[1], a[2]); }vtkGetVector3Macro(ViewUp, double);投影方式
设置/获取ParallelProjection实例变量的值。
这决定了相机应该进行透视投影还是平行投影。
void SetParallelProjection(vtkTypeBool flag);vtkGetMacro(ParallelProjection, vtkTypeBool);vtkBooleanMacro(ParallelProjection, vtkTypeBool);投影方向
投影方向是指从相机位置到焦点方向的矢量。
double DirectionOfProjection[3];
vtkGetVector3Macro(DirectionOfProjection, double);这通常与ViewPlaneNormal相反,即垂直于屏幕的向量,除非视图是倾斜的。
旋转
void Roll(double angle):围绕投影方向旋转相机
void Azimuth(double angle); 以焦点为中心,围绕朝上方向方向向量,即在焦点为中心,焦距为半径的圆球的维度线上水平旋转;
void Elevation(double angle); 以焦点为中心,在焦点为中心,焦距为半径的圆球的经度线方向上旋转垂直旋转;
void Yaw(double angle); 同Azimuth相似,以相机为中心,移动焦点坐标;
void Pitch(double angle); 同Elevation相似,以相机为中心,移动焦点坐标;
调整裁剪平面距离
ClippingRange即剪切平面,分为前后两个。只有在这两个剪切平面之间的内容才会被渲染和显示。默认值是(0.1,1000)。这个量一般不需要修改,而是在vtkRenderer对象中调用ResetCameraClippingRange()方法来自动重设渲染范围。如果你的图像显示不完整,但是稍微用鼠标旋转或平移一下又变完整了。建议试一下调用一次这个方法。
设置前裁剪平面和后裁剪平面,前裁剪平面就是距离相机较近的平面,后平面就是距离相机较远位置;
dNear和dFar是距离相机坐标的距离,在相机坐标向焦点方向上的距离;
void SetClippingRange(double dNear, double dFar);
void SetClippingRange(const double a[2]) { this->SetClippingRange(a[0], a[1]); }
vtkGetVector2Macro(ClippingRange, double);重置相机参数
vtkRenderer类可以重置使用的相机参数;
virtual void ResetCamera();
根据可见的vtkActor自动设置相机参数。使得相机会重新定位以观察演员的中心点,并沿其初始视图平面法线移动(即,从镜头位置到焦点),这样所有的vtkActor都可以在相机中看到。
从源码中可以看到ResetCamera()只会重置相机的焦点焦距朝上方向等信息,不会重置旋转角度,如果要从一个Renderer中获取多个旋转后图像,需要对角度进行修正后计算,每次ResetCamera()都会保留上一次旋转的角度;
相关文章:
VTK 三维场景的基本要素(相机) vtkCamera
观众的眼睛好比三维渲染场景中的相机,在VTK中用vtkCamera类来表示。vtkCamera负责把三维场景投影到二维平面,如屏幕,相机投影示意图如下图所示。 1.与相机投影相关的要素主要有如下几个: 1)相机位置: 相机所处的位置…...
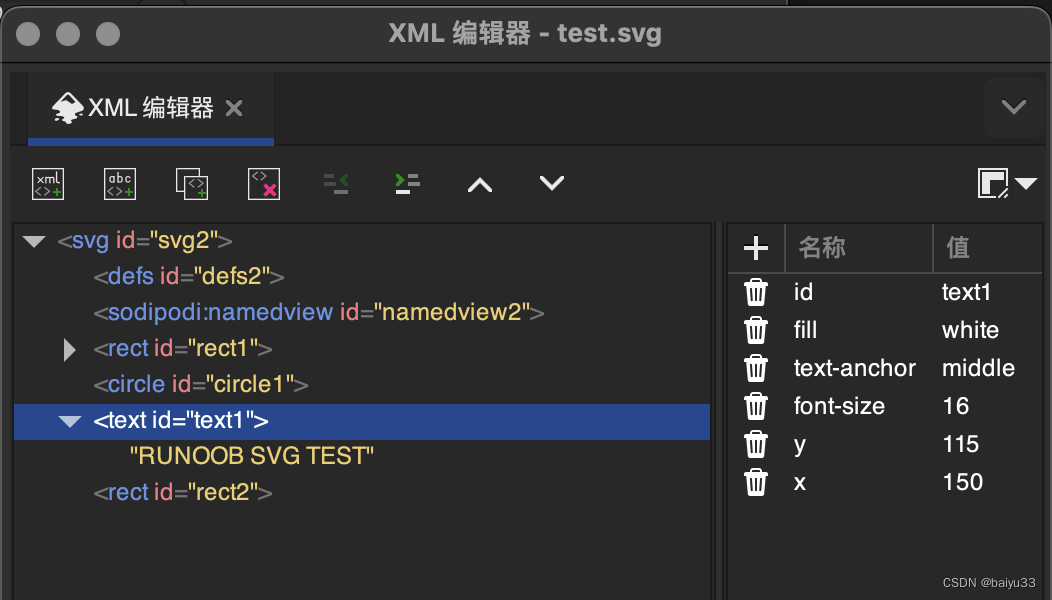
小游戏和GUI编程(5) | SVG图像格式简介
小游戏和GUI编程(5) | SVG图像格式简介 0. 问题 Q1: SVG 是什么的缩写?Q2: SVG 是一种图像格式吗?Q3: SVG 相对于其他图像格式的优点和缺点是什么?Q4: 哪些工具可以查看 SVG 图像?Q5: SVG 图像格式的规范是怎样的?Q6…...
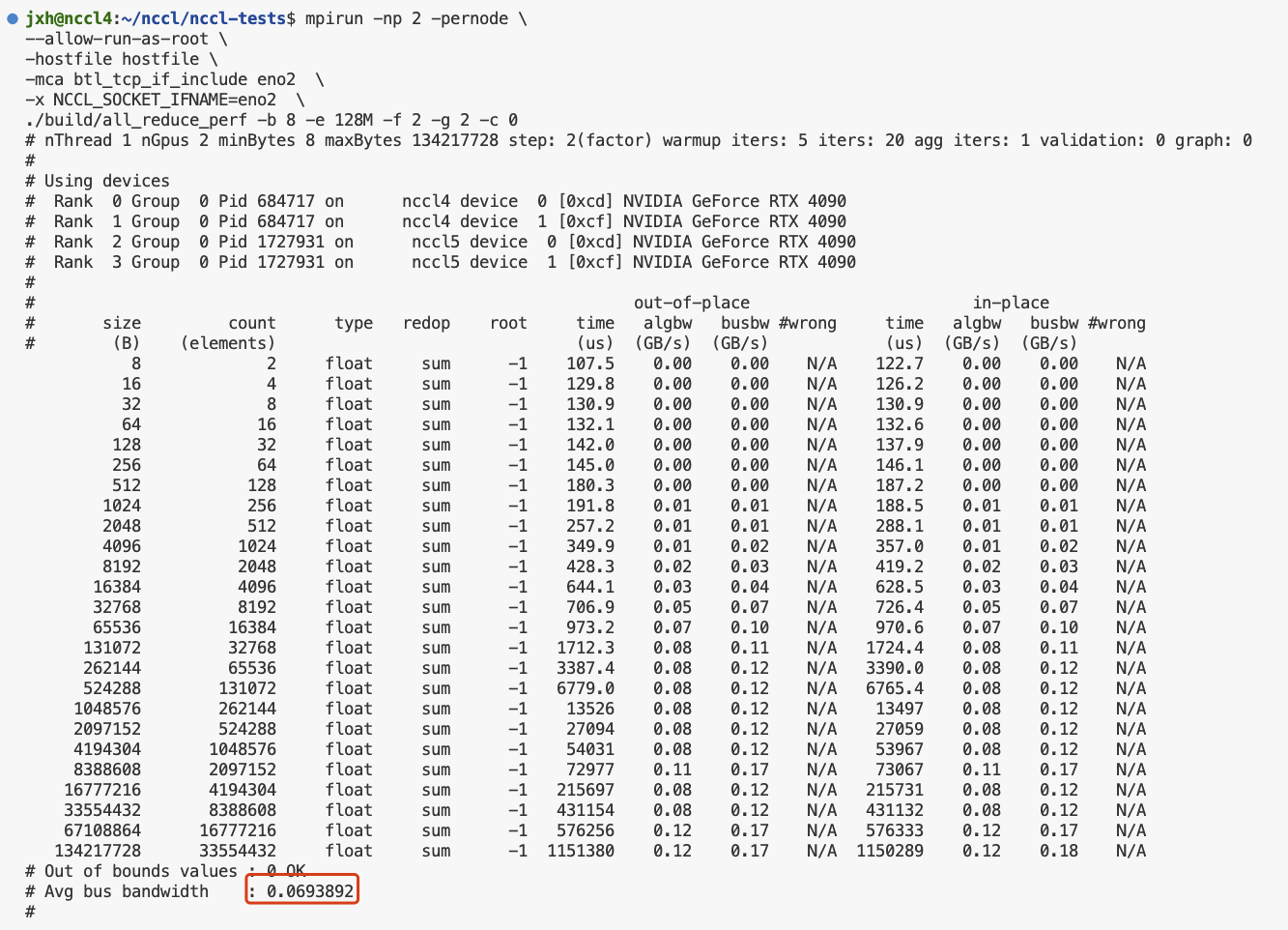
多机多卡运行nccl-tests和channel获取
nccl-tests 环境1. 安装nccl2. 安装openmpi3. 单机测试4. 多机测试mpirun多机多进程多节点运行nccl-testschannel获取 环境 Ubuntu 22.04.3 LTS (GNU/Linux 5.15.0-91-generic x86_64)cuda 11.8 cudnn 8nccl 2.15.1NVIDIA GeForce RTX 4090 *2 1. 安装nccl #查看cuda版本 nv…...
SQL,HQL刷题,尚硅谷
相关表数据: 1、score_info 2、student_info 题目及思路解析: 分组结果的条件 1、查询平均成绩大于60分的学生的学号和平均成绩 代码: selectstu_id,avg(score) score_avg from score_info group by stu_id having score_avg>60; 思路…...
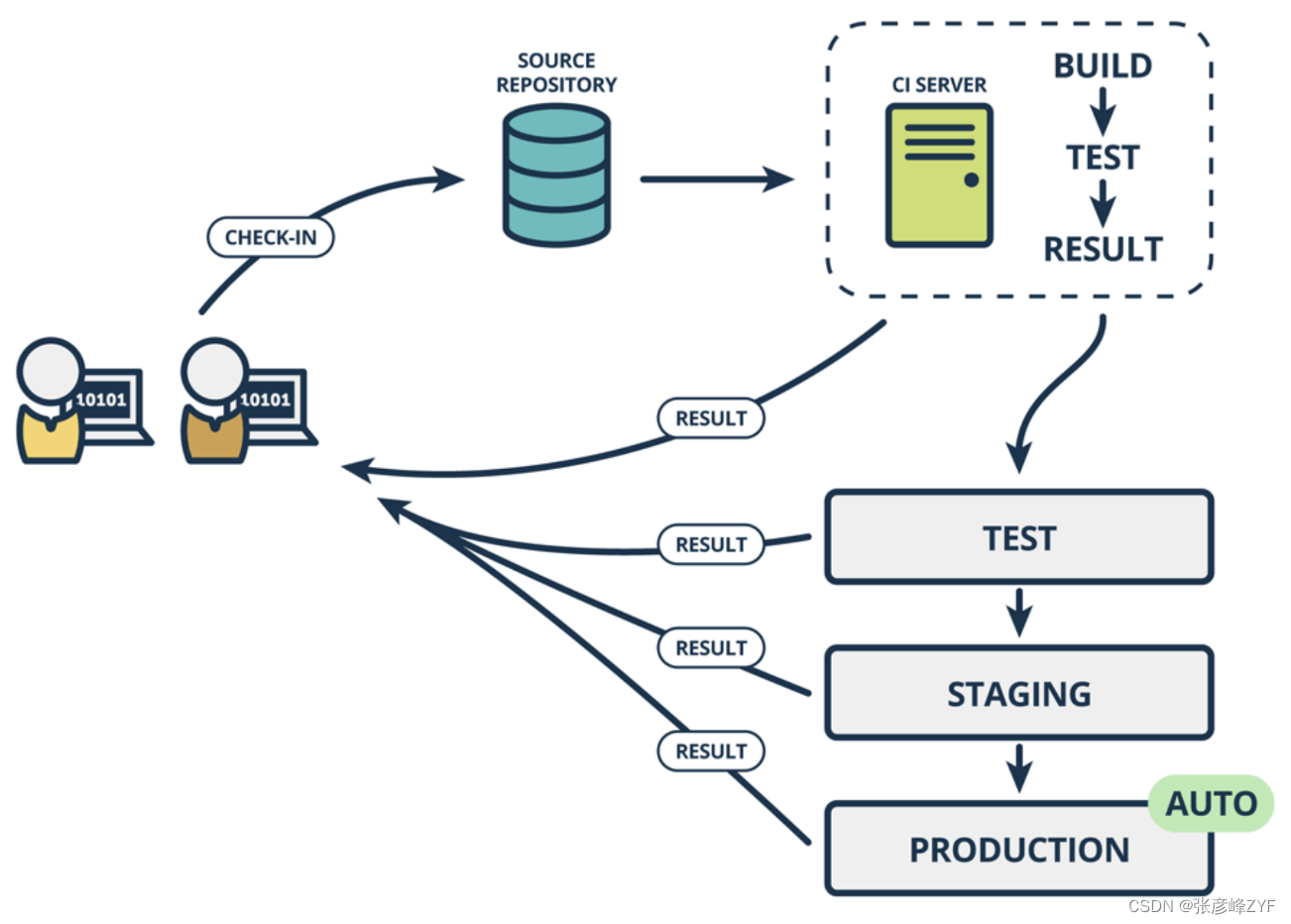
DevOps:CI、CD、CB、CT、CD
目录 一、软件开发流程演化快速回顾 (一)瀑布模型 (二)原型模型 (三)螺旋模型 (四)增量模型 (五)敏捷开发 (六)DevOps 二、走…...
)
[leetcode经典算法题]删除有序数组中的重复项(双指针)
删除有序数组中的重复项 给你一个 非严格递增排列 的数组 nums ,请你 原地 删除重复出现的元素,使每个元素 只出现一次 ,返回删除后数组的新长度。元素的 相对顺序 应该保持 一致 。然后返回 nums 中唯一元素的个数。 考虑 nums 的唯一元素…...
)
【国产MCU】-CH32V307-触摸按键检测(TKEY)
触摸按键检测(TKEY) 文章目录 触摸按键检测(TKEY)1、TKEY介绍2、TKEY使用实例触摸检测控制(TKEY)单元,借助ADC 模块的电压转换功能,通过将电容量转换为电压量进行采样,实现触摸按键检测功能。检测通道复用ADC 的16 个外部通道,通过ADC 模块的单次转换模式实现触摸按键…...

Hive的小文件问题
目录 一、小文件产生的原因 二、小文件的危害 三、小文件的解决方案 3.1 小文件的预防 3.1.1 减少Map数量 3.1.2 减少Reduce的数量 3.2 已存在的小文件合并 3.2.1 方式一:insert overwrite (推荐) 3.2.2 方式二:concatenate 3.2.3 方式三ÿ…...

攻防世界——re2-cpp-is-awesome
64位 我先用虚拟机跑了一下这个程序,结果输出一串字符串flag ——没用 IDA打开后 F5也没有什么可看的 那我们就F12查看字符串找可疑信息 这里一下就看见了 __int64 __fastcall main(int a1, char **a2, char **a3) {char *v3; // rbx__int64 v4; // rax__int64 v…...

问山海——天涯海角——桃花渊boss攻击顺序
文章目录 桃花渊代码代码解读代码执行结果攻击顺序示意图 桃花渊 规划击杀各个boss顺序。 副本持续时间为30分钟,每个地方的boss被打死后,需要一定时间才能重新刷新。 只考虑其中两种boss,龟将和龟龙。各有四个。 其中我从一个boss地点到…...
springboot181基于springboot的乐享田园系统
简介 【毕设源码推荐 javaweb 项目】基于springbootvue 的 适用于计算机类毕业设计,课程设计参考与学习用途。仅供学习参考, 不得用于商业或者非法用途,否则,一切后果请用户自负。 看运行截图看 第五章 第四章 获取资料方式 **项…...

Dubbo集成Zookeeper embbed模式
为了简化应用支持服务方便的分合,使用Zookeeper embbed模式。集成Zookeeper比较容易,使用starter或自己写代码都可以。但是由于集成了Dubbo,每次启动时都会发现zookeeper没有启动就开始报错退出,但是确是已经集成了。 于是只能翻…...
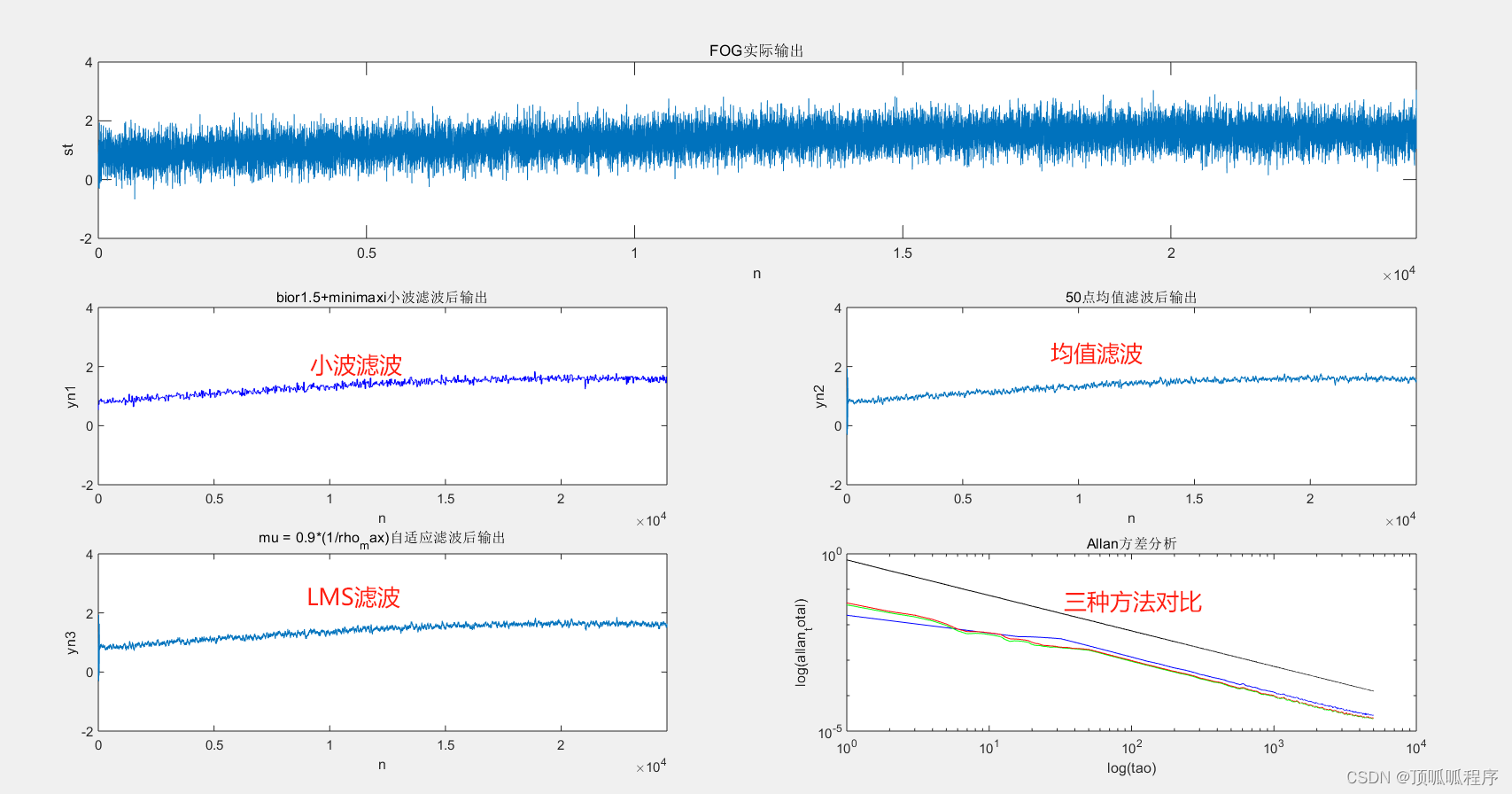
156基于Matlab的光纤陀螺随机噪声和信号
基于Matlab的光纤陀螺随机噪声和信号,利用固定步长和可调步长的LMS自适应滤波、最小二乘法、滑动均值三种方法进行降噪处理,最后用阿兰方差评价降噪效果。程序已调通,可直接运行。 156 信号处理 自适应滤波 降噪效果评估 (xiaohongshu.com)...
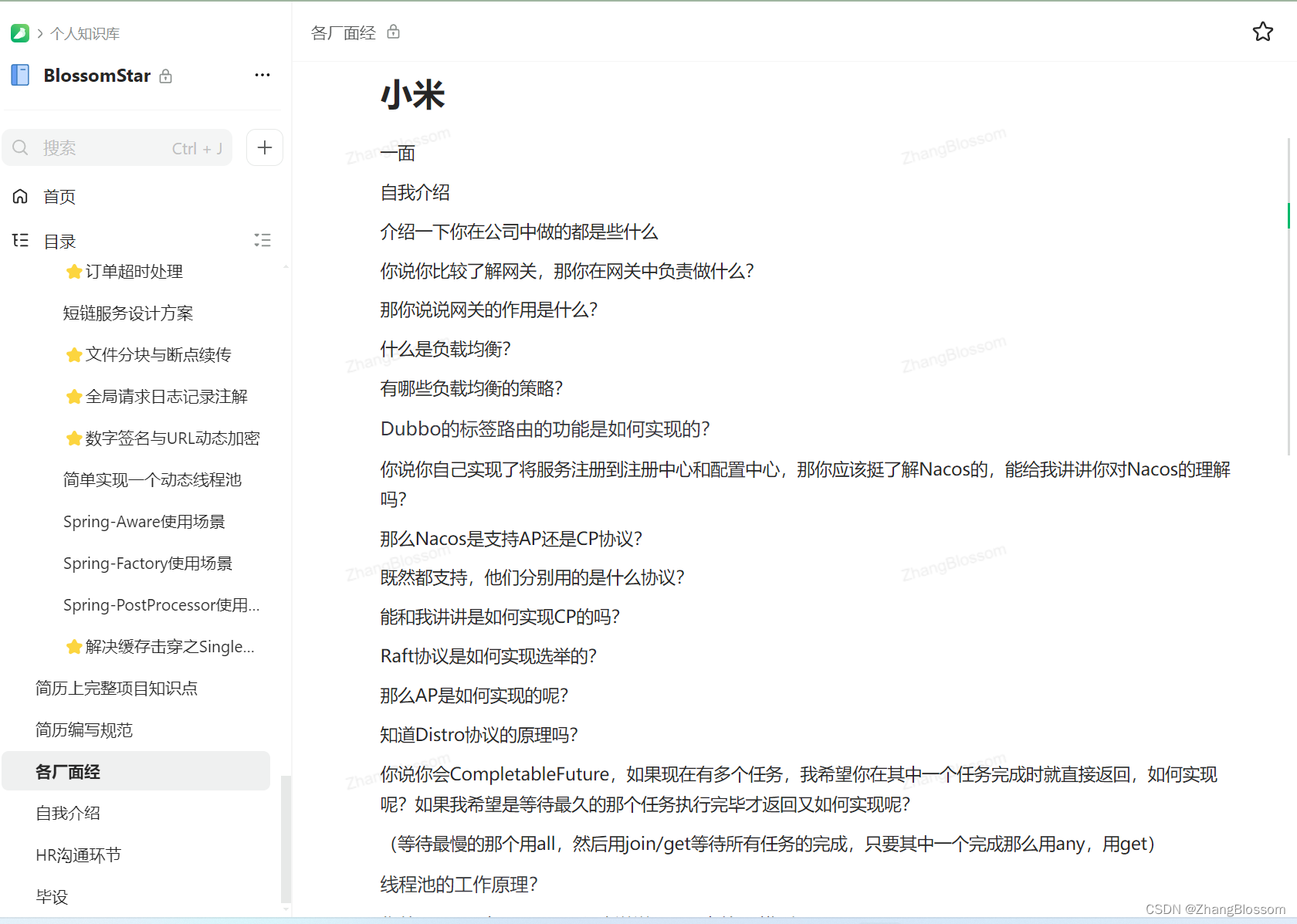
秋招上岸大厂,分享一下经验
文章目录 秋招过程学习过程项目经验简历经验面试经验offer选择总结 秋招过程 今天是除夕,秋招已经正式结束了,等春节过完就到了春招的时间点了。 运气比较好,能在秋招的末尾进入一家大厂,拿到20k的sp offer。 从九月份十月份就开…...

使用 C++23 从零实现 RISC-V 模拟器
👉🏻 文章汇总「从零实现模拟器、操作系统、数据库、编译器…」:https://okaitserrj.feishu.cn/docx/R4tCdkEbsoFGnuxbho4cgW2Yntc 使用 C23 从零实现 RISC-V 模拟器 使用 C23 从零实现的 RISC-V 模拟器,最终的模拟器可以运行 x…...
Hugging Face 刚刚推出了一款开源的 AI 助手制造工具,直接向 OpenAI 的定制 GPT 挑战
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

powershell 雅地关闭UDP监听器
在PowerShell中优雅地关闭UDP监听器意味着你需要一种机制来安全地停止正在运行的UdpClient实例。由于UdpClient类本身没有提供直接的停止或关闭方法,你需要通过其他方式来实现这一点。通常,这涉及到在监听循环中添加一个检查点,以便在接收到停…...

Google Cloud 2024 年报告重点介绍了关键的网络威胁和防御
Google Cloud 的 2024 年威胁范围报告预测了云安全的主要风险,并提出了加强防御的策略。 该报告由 Google 安全专家撰写,为寻求预测和应对不断变化的网络安全威胁的云客户提供了宝贵的资源。 该报告强调,凭证滥用、加密货币挖矿、勒索软件和…...

【算法题】102. 二叉树的层序遍历
题目 给你二叉树的根节点 root ,返回其节点值的 层序遍历 。 (即逐层地,从左到右访问所有节点)。 示例 1: 输入:root [3,9,20,null,null,15,7] 输出:[[3],[9,20],[15,7]] 示例 2:…...

【龙年大礼】| 2023中国开源年度报告!
【中国开源年度报告】由开源社从 2015 年发起,是国内首个结合多个开源社区、高校、媒体、风投、企业与个人,以纯志愿、非营利的理念和开源社区协作的模式,携手共创完成的开源研究报告。后来由于一些因素暂停,在 2018 年重启了这个…...

用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程
用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程 智能家居的概念早已不再遥不可及,借助STM32F103这样的低成本微控制器和简单的继电器模块,任何人都能将普通家电升级为智能设备。本文将手把手教你如何将一个普通台灯或风扇改…...

别再死记硬背!用Python+Verilog双视角图解2ASK/2FSK调制解调原理
PythonVerilog双视角图解2ASK/2FSK调制解调原理 通信工程的学习者常常陷入理论公式与硬件实现之间的认知断层。当教科书上的数学表达式突然变成硬件描述语言时,那种手足无措的感觉我深有体会——三年前第一次接触Verilog实现调制解调时,盯着代码里那些分…...

Cadence OrCAD Capture 层次化电路设计:用NetGroup信号线束高效管理多路SPI/I2C
Cadence OrCAD Capture 层次化电路设计:用NetGroup信号线束高效管理多路SPI/I2C 在嵌入式系统设计中,多路复用接口(如SPI、I2C)的拓扑结构已成为工程师日常面临的挑战。当主控芯片需要连接多个传感器、存储设备或外设模块时&…...

如何快速安全弹出USB设备:Windows用户的完整USB设备管理工具指南
如何快速安全弹出USB设备:Windows用户的完整USB设备管理工具指南 【免费下载链接】USB-Disk-Ejector A program that allows you to quickly remove drives in Windows. It can eject USB disks, Firewire disks and memory cards. It is a quick, flexible, portab…...

网盘直链解析助手:一站式解决多平台文件下载难题
网盘直链解析助手:一站式解决多平台文件下载难题 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 …...

VK视频下载器:三步实现VKontakte视频永久保存的实用方案
VK视频下载器:三步实现VKontakte视频永久保存的实用方案 【免费下载链接】VK-Video-Downloader Скачивайте видео с сайта ВКонтакте в желаемом качестве 项目地址: https://gitcode.com/gh_mirrors/vk/VK-Video…...

Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰
Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在…...

如何5分钟完成浏览器脚本安装:免费网盘直链解析工具终极指南
如何5分钟完成浏览器脚本安装:免费网盘直链解析工具终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 …...

用Obsidian+Templater插件打造你的专属日记系统:从脚本编写到自动归档
用ObsidianTemplater打造全自动日记管理系统:从脚本开发到智能归档 在数字时代,个人知识管理已成为现代人的必修课。当大多数日记应用将你的私人记忆锁在云端服务器时,一种更自主、更灵活的选择正在技术爱好者中流行——用Obsidian配合Templa…...

别再只盯着RRT了!关节空间六次多项式规划,可能是更简单的机械臂避障方案
关节空间六次多项式规划:机械臂避障的优雅解法 在工业机器人领域,路径规划一直是核心挑战之一。当机械臂需要在充满障碍物的环境中工作时,传统基于笛卡尔空间的规划方法常常面临逆运动学奇异、轨迹不平滑等问题。而基于关节空间的六次多项式规…...