HAL STM32通过multi_button库处理按键事件
HAL STM32通过multi_button库处理按键事件
- 📍作者:
0x1abin的multi_button库:https://github.com/0x1abin/MultiButton
📘MultiButton简介
MultiButton 是一个小巧简单易用的事件驱动型按键驱动模块,可无限量扩展按键,按键事件的回调异步处理方式可以简化你的程序结构,去除冗余的按键处理硬编码,让你的按键业务逻辑更清晰。
- 🔖 该库驱动代码纯C语言实现,可以移植到任意需要使用的地方。
🔑使用方法
- 先申请一个按键结构
struct Button button1;
- 初始化按键对象,绑定按键的GPIO电平读取接口read_button_pin() ,后一个参数设置有效触发电平。
button_init(&button1, read_button_pin, 0, 0);//绑定按键,读取按键引脚状态,有效触发电平、按键ID
- 注册按键事件
button_attach(&button1, SINGLE_CLICK, Callback_SINGLE_CLICK_Handler);
button_attach(&button1, DOUBLE_CLICK, Callback_DOUBLE_Click_Handler);
…
4. 启动按键
button_start(&button1);
- 设置一个5ms间隔的定时器循环调用后台处理函数
while(1) {...if(timer_ticks == 5) {timer_ticks = 0;button_ticks();}
}
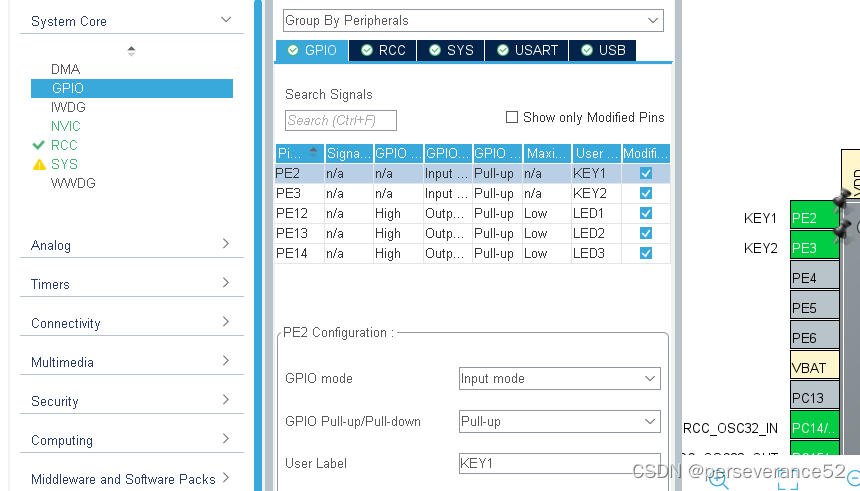
🛠按键引脚配置
- 🌿通过
STM32CubeMX,将按键引脚配置成上拉,那么有效触发电平就需要设置为0.
📗通过按键事件查询,获取按键状态
- 🌿在滴答定时器中断函数(
SysTick_Handler)中添加button_tick();
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "usb_device.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include <stdarg.h>
#include "usbd_cdc_if.h"
#include "multi_button.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
struct Button btn1;
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void usb_printf(const char *fmt, ...)
{char buf[128];//自定义缓冲区大小va_list args;va_start(args, fmt);vsnprintf(buf, sizeof(buf), fmt, args);va_end(args);CDC_Transmit_FS((uint8_t *)buf, strlen(buf));
}void button_tick(void)
{static uint8_t tickstart = 0;tickstart++;if(tickstart < 5)return;tickstart = 0;button_ticks();
}
//按键状态读取接口 按键输入模式 ReadInputDataBit
uint8_t Read_Button_GPIO(uint8_t button_id)
{// you can share the GPIO read function with multiple Buttonsswitch(button_id) {case 1:return HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin);case 2:return HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin);default:return 0;}
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint32_t TimerUART;static PressEvent btn1_event_val;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 */uint32_t Main_Fosc = HAL_RCC_GetSysClockFreq();printf("Main_Fosc:%dHz \r\n", Main_Fosc);TimerUART = HAL_GetTick();usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);button_init(&btn1, Read_Button_GPIO, 0, 1);button_start(&btn1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1) {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if((HAL_GetTick() - TimerUART) > 1000) {HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin | LED2_Pin | LED3_Pin); //翻转电平,LED翻转printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);TimerUART = HAL_GetTick();}if(btn1_event_val != get_button_event(&btn1)) {btn1_event_val = get_button_event(&btn1);if(btn1_event_val == PRESS_DOWN) {// printf("STM32F427 KEY1 PRESS_DOWN \r\n");usb_printf("STM32F427 KEY1 PRESS_DOWN \r\n");} else if(btn1_event_val == PRESS_UP) {// printf("STM32F427 KEY1 PRESS_UP \r\n");usb_printf("STM32F427 KEY1 PRESS_UP \r\n");} else if(btn1_event_val == LONG_PRESS_HOLD) {// printf("STM32F427 LONG_PRESS_HOLD\r\n"/);usb_printf("STM32F427 LONG_PRESS_HOLD\r\n");}}}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 16;RCC_OscInitStruct.PLL.PLLN = 384;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 8;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK) {Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while(1) {}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */📓通过注册按键事件,获取按键状态
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "usb_device.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include <stdarg.h>
#include "usbd_cdc_if.h"
#include "multi_button.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
struct Button btn1;
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void BTN1_PRESS_DOWN_Handler(void* btn);
void BTN1_PRESS_UP_Handler(void* btn);
void BTN1_SINGLE_Click_Handler(void* btn);
void BTN1_DOUBLE_Click_Handler(void* btn);
void BTN1_LONG_RRESS_START_Handler(void* btn);
void BTN1_LONG_PRESS_HOLD_Handler(void* btn);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void usb_printf(const char *fmt, ...)
{char buf[128];//自定义缓冲区大小va_list args;va_start(args, fmt);vsnprintf(buf, sizeof(buf), fmt, args);va_end(args);CDC_Transmit_FS((uint8_t *)buf, strlen(buf));
}void button_tick(void)
{static uint8_t tickstart = 0;tickstart++;if(tickstart < 5)return;tickstart = 0;button_ticks();
}
//按键状态读取接口 按键输入模式 ReadInputDataBit
uint8_t Read_Button_GPIO(uint8_t button_id)
{// you can share the GPIO read function with multiple Buttonsswitch(button_id) {case 1:return HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin);case 2:return HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin);default:return 0;}
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint32_t TimerUART;// static PressEvent btn1_event_val;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 */uint32_t Main_Fosc = HAL_RCC_GetSysClockFreq();printf("Main_Fosc:%dHz \r\n", Main_Fosc);TimerUART = HAL_GetTick();usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);button_init(&btn1, Read_Button_GPIO, 0, 1);// button_attach(&btn1, PRESS_DOWN, BTN1_PRESS_DOWN_Handler); //按下// button_attach(&btn1, PRESS_UP, BTN1_PRESS_UP_Handler); //按起// button_attach(&btn1, PRESS_REPEAT, BTN1_PRESS_REPEAT_Handler);button_attach(&btn1, SINGLE_CLICK, BTN1_SINGLE_Click_Handler); //单击button_attach(&btn1, DOUBLE_CLICK, BTN1_DOUBLE_Click_Handler); //双击button_attach(&btn1, LONG_PRESS_START, BTN1_LONG_RRESS_START_Handler); //长按开始// button_attach(&btn1, LONG_PRESS_HOLD, BTN1_LONG_PRESS_HOLD_Handler);//一直长按状态button_start(&btn1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1) {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if((HAL_GetTick() - TimerUART) > 1000) {HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin | LED2_Pin | LED3_Pin); //翻转电平,LED翻转printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);TimerUART = HAL_GetTick();}}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 16;RCC_OscInitStruct.PLL.PLLN = 384;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 8;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK) {Error_Handler();}
}/* USER CODE BEGIN 4 */
void BTN1_PRESS_DOWN_Handler(void* btn)
{// printf("STM32F427 KEY1 PRESS_DOWN \r\n");usb_printf("STM32F427 KEY1 PRESS_DOWN \r\n");
}void BTN1_PRESS_UP_Handler(void* btn)
{// printf("STM32F427 KEY1 PRESS_UP \r\n");usb_printf("STM32F427 KEY1 PRESS_UP \r\n");
}
void BTN1_SINGLE_Click_Handler(void* btn)
{// printf("STM32F427 KEY1 SINGLE_Click \r\n");usb_printf("STM32F427 KEY1 SINGLE_Click \r\n");
}
void BTN1_DOUBLE_Click_Handler(void* btn)
{// printf("STM32F427 KEY1 DOUBLE_Click \r\n");usb_printf("STM32F427 KEY1 DOUBLE_Click \r\n");
}
void BTN1_LONG_RRESS_START_Handler(void* btn)
{// printf("STM32F427 KEY1 LONG_RRESS_START \r\n");usb_printf("STM32F427 KEY1 LONG_RRESS_START \r\n");
}
void BTN1_LONG_PRESS_HOLD_Handler(void* btn)
{// printf("STM32F427 KEY1 LONG_PRESS_HOLD \r\n");usb_printf("STM32F427 KEY1 LONG_PRESS_HOLD \r\n");
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while(1) {}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */📝通过注册按键事件,统一查询获取按键状态
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "usb_device.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include <stdarg.h>
#include "usbd_cdc_if.h"
#include "multi_button.h"/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV */
struct Button btn1;
/* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
//void BTN1_PRESS_DOWN_Handler(void* btn);
//void BTN1_PRESS_UP_Handler(void* btn);
//void BTN1_SINGLE_Click_Handler(void* btn);
//void BTN1_DOUBLE_Click_Handler(void* btn);
//void BTN1_LONG_RRESS_START_Handler(void* btn);
//void BTN1_LONG_PRESS_HOLD_Handler(void* btn);
void button_callback(void *btn);//
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void usb_printf(const char *fmt, ...)
{char buf[128];//自定义缓冲区大小va_list args;va_start(args, fmt);vsnprintf(buf, sizeof(buf), fmt, args);va_end(args);CDC_Transmit_FS((uint8_t *)buf, strlen(buf));
}void button_tick(void)
{static uint8_t tickstart = 0;tickstart++;if(tickstart < 5)return;tickstart = 0;button_ticks();
}
//按键状态读取接口 按键输入模式 ReadInputDataBit
uint8_t Read_Button_GPIO(uint8_t button_id)
{// you can share the GPIO read function with multiple Buttonsswitch(button_id) {case 1:return HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin);case 2:return HAL_GPIO_ReadPin(KEY2_GPIO_Port, KEY2_Pin);default:return 0;}
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */
// uint32_t TimerUART;// static PressEvent btn1_event_val;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART1_UART_Init();MX_USB_DEVICE_Init();/* USER CODE BEGIN 2 */uint32_t Main_Fosc = HAL_RCC_GetSysClockFreq();printf("Main_Fosc:%dHz \r\n", Main_Fosc);
// TimerUART = HAL_GetTick();usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);button_init(&btn1, Read_Button_GPIO, 0, 1);// button_attach(&btn1, PRESS_DOWN, button_callback); //按下// button_attach(&btn1, PRESS_UP, button_callback); //按起// button_attach(&btn1, PRESS_REPEAT,button_callback);button_attach(&btn1, SINGLE_CLICK, button_callback); //单击button_attach(&btn1, DOUBLE_CLICK, button_callback); //双击button_attach(&btn1, LONG_PRESS_START, button_callback); //长按开始// button_attach(&btn1, LONG_PRESS_HOLD, button_callback);//一直长按状态button_start(&btn1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1) {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
// if((HAL_GetTick() - TimerUART) > 1000) {
// HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin | LED2_Pin | LED3_Pin); //翻转电平,LED翻转
// printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);
// usb_printf("STM32F427 SysClockFreq:%d \r\n", Main_Fosc);
// TimerUART = HAL_GetTick();
// }/*if(btn1_event_val != get_button_event(&btn1)) {btn1_event_val = get_button_event(&btn1);if(btn1_event_val == PRESS_DOWN) {// printf("STM32F427 KEY1 PRESS_DOWN \r\n");usb_printf("STM32F427 KEY1 PRESS_DOWN \r\n");} else if(btn1_event_val == PRESS_UP) {// printf("STM32F427 KEY1 PRESS_UP \r\n");usb_printf("STM32F427 KEY1 PRESS_UP \r\n");} else if(btn1_event_val == LONG_PRESS_HOLD) {// printf("STM32F427 LONG_PRESS_HOLD\r\n"/);usb_printf("STM32F427 LONG_PRESS_HOLD\r\n");}}*/}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/__HAL_RCC_PWR_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 16;RCC_OscInitStruct.PLL.PLLN = 384;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;RCC_OscInitStruct.PLL.PLLQ = 8;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK) {Error_Handler();}
}/* USER CODE BEGIN 4 */
void BTN1_PRESS_DOWN_Handler(void* btn)
{// printf("STM32F427 KEY1 PRESS_DOWN \r\n");usb_printf("STM32F427 KEY1 PRESS_DOWN \r\n");
}void BTN1_PRESS_UP_Handler(void* btn)
{// printf("STM32F427 KEY1 PRESS_UP \r\n");usb_printf("STM32F427 KEY1 PRESS_UP \r\n");
}
void BTN1_SINGLE_Click_Handler(void* btn)
{// printf("STM32F427 KEY1 SINGLE_Click \r\n");usb_printf("STM32F427 KEY1 SINGLE_Click \r\n");
}
void BTN1_DOUBLE_Click_Handler(void* btn)
{// printf("STM32F427 KEY1 DOUBLE_Click \r\n");usb_printf("STM32F427 KEY1 DOUBLE_Click \r\n");
}
void BTN1_LONG_RRESS_START_Handler(void* btn)
{// printf("STM32F427 KEY1 LONG_RRESS_START \r\n");usb_printf("STM32F427 KEY1 LONG_RRESS_START \r\n");
}
void BTN1_LONG_PRESS_HOLD_Handler(void* btn)
{// printf("STM32F427 KEY1 LONG_PRESS_HOLD \r\n");usb_printf("STM32F427 KEY1 LONG_PRESS_HOLD \r\n");
}void button_callback(void *btn)
{
static PressEvent btn1_event_val;
// uint32_t btn_event_val;
// btn_event_val = get_button_event((struct Button *)btn);
// btn_event_val = get_button_event(&btn1);
if(btn1_event_val != get_button_event(&btn1)) {btn1_event_val = get_button_event(&btn1);switch(btn1_event_val){case PRESS_DOWN:printf("---> KEY1 press down! <---\r\n"); usb_printf("---> KEY1 press down! <---\r\n"); break; case PRESS_UP: printf("***> KEY1 press up! <***\r\n");usb_printf("---> KEY1 press up! <---\r\n");break; case PRESS_REPEAT: printf("---> KEY1 press repeat! <---\r\n");break; case SINGLE_CLICK: printf("---> KEY1 single click! <---\r\n");usb_printf("---> KEY1 single click! <---\r\n");break; case DOUBLE_CLICK: printf("***> KEY1 double click! <***\r\n");usb_printf("---> KEY1 double click! <---\r\n");break; case LONG_PRESS_START: printf("---> KEY1 long press start! <---\r\n");usb_printf("---> KEY1 long press start! <---\r\n");break; case LONG_PRESS_HOLD: printf("***> KEY1 long press hold! <***\r\n");usb_printf("---> KEY1 press down! <---\r\n");break; default:break;}
}
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while(1) {}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */📚相关测试工程
链接:https://pan.baidu.com/s/1DRqSkKnj6Kznh3izOLrlWQ?pwd=awf4
提取码:awf4
链接:https://pan.baidu.com/s/1rviDB1MHQTQZkIBr590wXQ?pwd=11tu
提取码:11tu
链接:https://pan.baidu.com/s/1GkQE7OZJnBn8t6gNXMahEw?pwd=vhw5
提取码:vhw5
相关文章:
HAL STM32通过multi_button库处理按键事件
HAL STM32通过multi_button库处理按键事件 📍作者:0x1abin的multi_button库:https://github.com/0x1abin/MultiButton 📘MultiButton简介 MultiButton 是一个小巧简单易用的事件驱动型按键驱动模块,可无限量扩展按键,…...
随机过程及应用学习笔记(一)概率论(概要)
概率是随机的基础,在【概率论(概要)】这个部分中仅记录学习随机过程及应用的基本定义和结果。 前言 首先,概率论研究的基础是概率空间。概率空间由一个样本空间和一个概率测度组成,样本空间包含了所有可能的结果&…...

洛谷_P1059 [NOIP2006 普及组] 明明的随机数_python写法
这道题的关键在于去重和排序,去重可以联想到集合,那排序直接使用sort方法。 n int(input()) data set(map(int,input().split( ))) data list(data) data.sort() print(len(data)) for i in data:print(i,end )...

爆火的人工智能开源open-interpreter源码解析
今天这篇文章带大家一起来阅读下github上爆火的开源项目 open-interpreter的源代码,相当于是一个可以本地部署的openai code-interpreter。 今天这期我们透过现象看本质,一起来剖析下他的源码。 体验open-interpreter的视频地址 open-interpreter&…...
)
POM设计模式思路,详解POM:概述与介绍,POM思路梳理+代码示例(全)
概述 在UI自动化测试中,POM模式是一种设计思路,它的核心思想是方法的封装。它将方法类和页面元素进行分离,增强了代码的可维护性。值得注意的是,这种分层的设计模式,最好也是从线性代码开始,逐步将代码进行…...
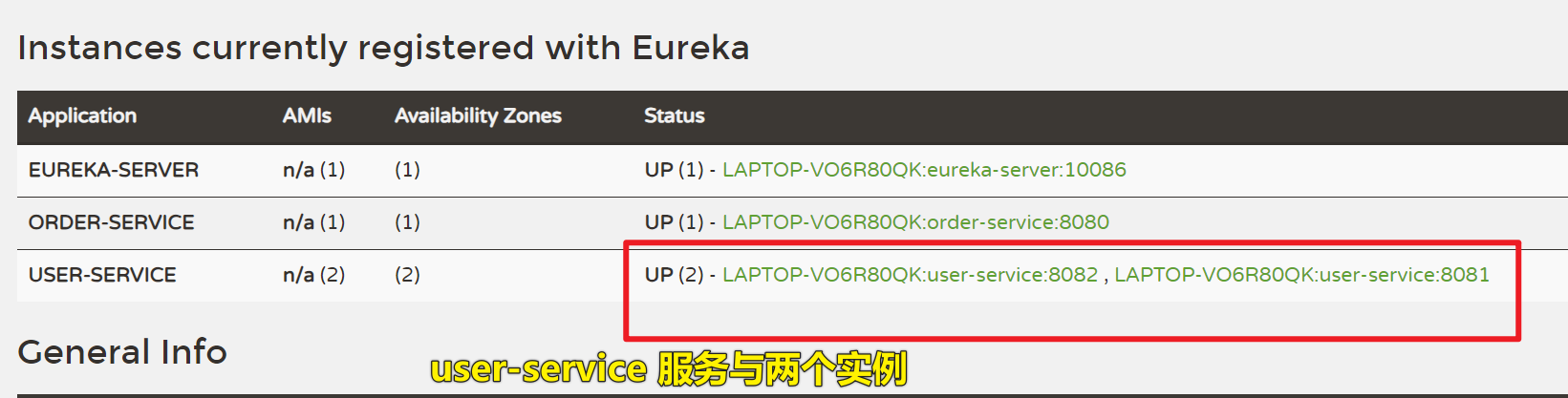
1、学习 Eureka 注册中心
学习 Eureka 注册中心 一、创建 Eureka 微服务0、SpringBoot 和 SpringCloud 版本1、引入 Eureka 服务端依赖2、启动类加 EnableEurekaServer 注解3、配置 yaml 文件,把 Eureka 服务注册到 Eureka 注册中心4、访问 Eureka 服务端,查看注册中心的服务列表…...

何为分账系统?
1、分账系统产生的背景 在数字化浪潮下第三方支付价值凸显,大大提升资金流与信息流流转效率,成为构建产业数字化重要枢纽。近年来,基于云计算、大数据、人工智能、物联网等技术积累,以第三方支付为切点的金融科技创新爆发着强大的…...
机器学习10-特征缩放
特征缩放的目的是确保不同特征的数值范围相近,使得模型在训练过程中更加稳定,加速模型收敛,提高模型性能。具体而言,零均值和单位方差的目标有以下几点好处: 1. 均值为零(Zero Mean):…...
Java基于微信小程序的医院挂号小程序,附源码
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝12w、csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇…...
HarmonyOS一杯冰美式的时间 -- 验证码框
一、前言 像是短密码、验证码都有可能需要一个输入框,像是如下: 恰好在写HarmonyOS的时候也需要写一个验证码输入框,但是在实现的时候碰了几次灰,觉得有必要分享下,故有了此篇文章。 如果您有任何疑问、对文章写的不…...

GitLab配置SSHKey
段落一:什么是SSH密钥 SSH(Secure Shell)是一种网络协议,用于安全地远程登录和执行命令。SSH密钥是一种用于身份验证的加密文件,它允许您在与远程服务器通信时,无需输入密码即可进行认证。在GitLab中配置S…...
通过QT制作一个模仿微信主界面的界面(不要求实现具体通信功能)
main.cpp #include "widget.h" #include "second.h"#include <QApplication>int main(int argc, char *argv[]) {QApplication a(argc, argv);Widget w;w.show();//实例化第二个界面Second s;QObject::connect(&w, &Widget::my_jump, &…...
 数据同化思路)
作物模型狂奔:WOFOST(PCSE) 数据同化思路
去B吧,这里没图 整体思路:PCSE -》 敏感性分析 -》调参 -》同化 0、准备工作 0.0 电脑环境 我用的Win10啦,Linux、Mac可能得自己再去微调一下。 0.1 Python IDE 我用的Pycharm,个人感觉最好使的IDE,没有之一。 …...
腾讯云4核8G服务器能支持多少人访问?
腾讯云4核8G服务器支持多少人在线访问?支持25人同时访问。实际上程序效率不同支持人数在线人数不同,公网带宽也是影响4核8G服务器并发数的一大因素,假设公网带宽太小,流量直接卡在入口,4核8G配置的CPU内存也会造成计算…...

多重背包问题 ⅠⅡ Ⅲ
有 N 种物品和一个容量是 V 的背包。 第 i 种物品最多有 si 件,每件体积是 vi,价值是 wi。 求解将哪些物品装入背包,可使物品体积总和不超过背包容量,且价值总和最大。 输出最大价值。 输入 第一行两个整数,N…...

挑战杯 python的搜索引擎系统设计与实现
0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 python的搜索引擎系统设计与实现 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:5分创新点:3分 该项目较为新颖ÿ…...

【LeetCode: 103. 二叉树的锯齿形层序遍历 + BFS】
🚀 算法题 🚀 🌲 算法刷题专栏 | 面试必备算法 | 面试高频算法 🍀 🌲 越难的东西,越要努力坚持,因为它具有很高的价值,算法就是这样✨ 🌲 作者简介:硕风和炜,…...
C#学习(十三)——多线程与异步
一、什么是线程 程序执行的最小单元 一次页面的渲染、一次点击事件的触发、一次数据库的访问、一次登录操作都可以看作是一个一个的进程 在一个进程中同时启用多个线程并行操作,就叫做多线程 由CPU来自动处理 线程有运行、阻塞、就绪三态 代码示例: cl…...
)
MySQL 数据库安装教程详解(linux系统和windows系统)
MySQL 数据库是一种广泛使用的开源关系数据库管理系统。在 Linux 和 Windows 系统上安装 MySQL 数据库的步骤略有不同。以下是详细的安装教程。 Linux 系统安装教程 1. **安装前提**:确保你的 Linux 系统已经安装了 wget、unzip、tar 等必要的工具。 2. **下…...
从汇编分析C语言可变参数的原理,并实现一个简单的sprintf函数
C语言可变参数 使用printf等函数的时候函数原型是printf(const char* fmt, ...), 这一类参数的个数不限的函数是可变参数 使用 使用一个头文件stdarg.h, 主要使用以下的宏 typedef char * va_list;// 把 n 圆整到 sizeof(int) 的倍数 #define _INTSIZEOF(n) ( (sizeo…...

别再混淆了!一文理清华为云Stack里FusionStorage、OceanStor Pacific与存储服务的对应关系
华为云Stack存储产品演进史:从FusionStorage到OceanStor Pacific的技术脉络解析 在云计算基础设施领域,存储系统的命名规则往往反映了技术架构的迭代路径。华为云Stack作为企业级混合云解决方案,其存储产品线经历了多次重大技术革新与品牌整合…...

保姆级教程:用QGIS的SRTM-Downloader插件,5分钟搞定中国区域地形图下载与渲染
5分钟极速出图:QGIS地形图制作全流程实战指南 当你在凌晨三点赶制项目报告,或是课程作业截止前两小时突然需要一张专业地形图时,传统GIS软件的复杂操作流程往往让人抓狂。本文将带你用QGIS的SRTM-Downloader插件,像点外卖一样简单…...

特征对高效数值算法及在船舶轴系振动计算中的应用【附仿真】
✨ 长期致力于特征值与特征向量、对称三对角矩阵、振动计算、船舶推进轴系、并行计算研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)分治并行三对角特…...

【软考高级架构】案例题考前突击19——微服务架构下的服务注册发现与熔断限流机制设计
案例分析题:微服务架构下的服务注册发现与熔断限流机制设计 案例背景 B公司开发了一套大型电商系统,采用Spring Cloud微服务架构实现商品管理、订单管理、支付服务、用户服务、搜索推荐等多个服务模块。系统部署在Kubernetes平台上,采用Eureka作为服务注册中心,Ribbon和F…...

终极USB安全弹出解决方案:告别Windows设备占用烦恼
终极USB安全弹出解决方案:告别Windows设备占用烦恼 【免费下载链接】USB-Disk-Ejector A program that allows you to quickly remove drives in Windows. It can eject USB disks, Firewire disks and memory cards. It is a quick, flexible, portable alternativ…...

终极Obsidian个性化首页配置指南:3小时打造你的专属知识管理中心
终极Obsidian个性化首页配置指南:3小时打造你的专属知识管理中心 【免费下载链接】obsidian-homepage Obsidian homepage - Minimal and aesthetic template (with my unique features) 项目地址: https://gitcode.com/gh_mirrors/obs/obsidian-homepage 你是…...

Nintendo Switch游戏备份终极指南:用nxdumptool轻松提取你的游戏收藏
Nintendo Switch游戏备份终极指南:用nxdumptool轻松提取你的游戏收藏 【免费下载链接】nxdumptool Generates XCI/NSP/HFS0/ExeFS/RomFS/Certificate/Ticket dumps from Nintendo Switch gamecards and installed SD/eMMC titles. 项目地址: https://gitcode.com/…...

移动端测试实战:App兼容性测试的全套解决方案
一、移动端App兼容性测试的核心价值与挑战在移动互联网生态中,设备碎片化、系统版本迭代加速、网络环境多样性等因素,使得App兼容性问题成为影响用户体验与产品口碑的关键变量。据行业数据统计,兼容性问题引发的用户投诉占比超过30%ÿ…...

高端工程场景实测:OpenAI Codex CLI 在微服务重构中的 3 类能力边界
1. 微服务重构现场:Codex CLI 不是万能胶,但能精准补上三块关键拼图 我接手一个运行了四年的电商微服务集群时,它正卡在「订单履约链路」的重构临界点上。17个服务、32个跨服务调用点、4种异步消息协议、2套数据库分片策略——人工梳理接口契约要两周,写迁移脚本要三天,验…...

Auto Edit 日常迭代踩坑实录:OpenAI Codex CLI 三种权限模式配置差异与 2 类高频报错修复
1. Auto Edit 模式不是“全自动”,而是最易失控的权限模式 大多数人第一次在项目里启用 codex cli --mode=auto-edit,是冲着“自动改代码”去的。我也是。直到某天凌晨两点,CI 流水线突然报出 17 个 test failure,而 git diff 显示——它把一个 if (user.role === admin) …...