蓝桥杯嵌入式第12届真题(完成) STM32G431
蓝桥杯嵌入式第12届真题(完成) STM32G431
题目

程序
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "led.h"
#include "key.h"
#include "usart1.h"
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
uint8_t view = 1;
uint8_t carnums = 8;
uint8_t CNBRnums = 2;
uint8_t VNBRnums = 4;
uint8_t IDLEnums = 2;
float CNBRprice = 3.50f;
float VNBRprice = 2.00f;
uint8_t lcdtext[20];
extern struct Key key[4];
uint8_t pwm = 0;
extern uint8_t rxflag;
extern uint8_t rxdata[1];
extern uint8_t rxindex;
extern uint8_t rxbuffer[22];
uint8_t cartype[4];
uint8_t carnum[4];
uint8_t cartime[12];
uint8_t printtext[30];
struct Times
{int year;int month;int day;int hour;int min;
};
struct Cars // 串口接收
{char carKind[5]; //车型char carNum[5]; //车牌号char carTime[12]; //进入时间struct Times Time;
};struct Cars car;
struct Cars park[8]={0,0,0,0,0,0,0,0};
float stopprice;
uint8_t led,led1enable,led2enable;
int monthDays[12] = {31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31};
uint8_t isError = 0;
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void key_process(void);
void usart1_process(void);
void lcd_process(void);
void led_process(void);
void outpark(uint8_t car_num);
void inpark(void);
void isErrorProcess(void);
void lcdclear(void);
int isLeapYear(int year);
long dateToTotalMinutes(struct Times t);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_TIM17_Init();MX_USART1_UART_Init();HAL_TIM_Base_Start_IT(&htim2);HAL_UART_Receive_IT(&huart1,rxdata,1);/* USER CODE BEGIN 2 */LCD_Init();lcdclear();led_Display(0x00);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){key_process();usart1_process();lcd_process();led_process();isErrorProcess();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void key_process(void)
{if(key[0].key_single_flag){key[0].key_single_flag = 0;if(view==1){view = 2;}else{view = 1;}}if(key[1].key_single_flag){key[1].key_single_flag = 0;if(view==2){CNBRprice+=0.5f;VNBRprice+=0.5f;}}if(key[2].key_single_flag){key[2].key_single_flag = 0;if(view==2){CNBRprice-=0.5f;VNBRprice-=0.5f;}}if(key[3].key_single_flag){key[3].key_single_flag = 0;pwm=!pwm;if (pwm){HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1);__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1,200);}else{HAL_TIM_PWM_Stop(&htim17, TIM_CHANNEL_1); // 停止PWMHAL_GPIO_WritePin(GPIOA, GPIO_PIN_7, GPIO_PIN_RESET); // 设置PA7为低电平}}}
void outpark(uint8_t car_num)
{sscanf(car.carTime, "%4d%2d%2d%2d%2d", &car.Time.year, &car.Time.month, &car.Time.day, &car.Time.hour, &car.Time.min);// 计算两个时间点的总分钟数long carTimeInMin = dateToTotalMinutes(car.Time);long parkTimeInMin = dateToTotalMinutes(park[car_num].Time);// 计算经过的总时间(以分钟为单位),并转换为小时long diffInMin = carTimeInMin - parkTimeInMin;int hoursPassed = diffInMin / 60;// 如果不满一小时,则按一小时计算if(diffInMin % 60 > 0) {hoursPassed++;}// 保证至少为1小时if(hoursPassed <= 0) {hoursPassed = 1;}if(strcmp(car.carKind,"VNBR") ==0){VNBRnums --;IDLEnums ++;stopprice=hoursPassed*VNBRprice;}else if(strcmp(car.carKind,"CNBR") ==0){CNBRnums --;IDLEnums ++;stopprice=hoursPassed*CNBRprice;}memset(&park[car_num],0,sizeof(park[car_num]));sprintf((char *)printtext,"%s:%s:%d:%.2f\r\n",car.carKind,car.carNum,hoursPassed,stopprice);HAL_UART_Transmit(&huart1,printtext,strlen((char *)printtext),50);}void inpark(void)
{sscanf(car.carTime, "%4d%2d%2d%2d%2d", &car.Time.year, &car.Time.month, &car.Time.day, &car.Time.hour, &car.Time.min);for (int i = 0; i < 8; i++) {// 查找第一个空位if (park[i].carNum[0] == '\0') { // 假设未使用的车位carNum为'\0'park[i] = car;// 更新车位统计信息if (strcmp(car.carKind, "CNBR") == 0) {CNBRnums++;IDLEnums--;} else if (strcmp(car.carKind, "VNBR") == 0) {VNBRnums++;IDLEnums--;}break; // 退出循环}}}void usart1_process(void)
{if(rxflag){rxflag = 0;rxindex = 0;int parsedItems = sscanf((char*)rxbuffer,"%4s:%4s:%12s",car.carKind,car.carNum,car.carTime);if(parsedItems == 3){if(strcmp(car.carKind,"CNBR")==0||strcmp(car.carKind,"VNBR")==0)//格式正确{for(int i = 0;i < 8;i++){if(strcmp(park[i].carNum,car.carNum)==0) //车库中有,需要出库{if(strcmp(park[i].carKind,car.carKind) == 0){outpark(i);break;}else{isError = 1;}}else if(strcmp(park[i].carNum,car.carNum)!=0&&IDLEnums>0)//车库中没有需要,入库{inpark();break;}}}else{isError = 1;}}else{isError = 1;}rxflag = 0;rxindex = 0;HAL_UART_Receive_IT(&huart1,rxdata,1);}
}void isErrorProcess(void)
{if(isError == 1){sprintf((char *)printtext,"Error\r\n");HAL_UART_Transmit(&huart1,(uint8_t*)printtext,strlen((char *)printtext),50);isError = 0;}
}
void lcd_process(void)
{switch (view){case 1://车位显示页面{sprintf((char *)lcdtext," Data");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," CNBR:%d",CNBRnums);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," VNBR:%d",VNBRnums);LCD_DisplayStringLine(Line5,lcdtext);sprintf((char *)lcdtext," IDLE:%d",IDLEnums);LCD_DisplayStringLine(Line7,lcdtext);}break;case 2: //费率设置页面{sprintf((char *)lcdtext," Para");LCD_DisplayStringLine(Line1,lcdtext);sprintf((char *)lcdtext," CNBR:%.2f",CNBRprice);LCD_DisplayStringLine(Line3,lcdtext);sprintf((char *)lcdtext," VNBR:%.2f",VNBRprice);LCD_DisplayStringLine(Line5,lcdtext);}break;}
}
void led_process(void)
{if(IDLEnums>0){led1enable = 1;}else{led1enable = 0;}if(pwm==1){led2enable = 1;}else{led2enable = 0;}if(led1enable){led|=0x01;}else{led&=~0x01;}if(led2enable){led|=0x02;}else{led&=~0x02;}led_Display(led);
}void lcdclear()
{LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);
}int isLeapYear(int year) {if (year % 4 != 0) return 0;if (year % 100 != 0) return 1;if (year % 400 == 0) return 1;return 0;
}
long dateToTotalMinutes(struct Times t) {// 添加之前的年份所包含的分钟数long totalMinutes = (t.year - 1) * 365 * 24 * 60;// 添加闰年的额外分钟数totalMinutes += ((t.year - 1) / 4 - (t.year - 1) / 100 + (t.year - 1) / 400) * 24 * 60;// 添加当前年份中之前月份的分钟数for (int i = 0; i < t.month - 1; i++) {totalMinutes += monthDays[i] * 24 * 60;}// 如果当前年份是闰年并且月份大于2,则额外添加一天的分钟数if (t.month > 2 && isLeapYear(t.year)) totalMinutes += 24 * 60;// 添加当前月份中的天数、小时和分钟totalMinutes += (t.day - 1) * 24 * 60; // 天数减1,因为当天不满24小时totalMinutes += t.hour * 60;totalMinutes += t.min;return totalMinutes;
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/key.c
#include "key.h"
struct Key key[4]={0,0,0,0};
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<4;i++){switch (key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_single_flag = 1;key[i].key_status = 2;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_status = 0;}}break;}}}}
led.c
#include "led.h"void led_Display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}usart1.c
#include "usart1.h"
#include "usart.h"
#include "string.h"
uint8_t rxflag;
uint8_t rxdata[1];
uint8_t rxindex = 0;
uint8_t rxbuffer[22];void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance==USART1){rxbuffer[rxindex++] = rxdata[0];HAL_UART_Receive_IT(huart,rxdata,1);if(rxindex==22){rxflag = 1;}}}
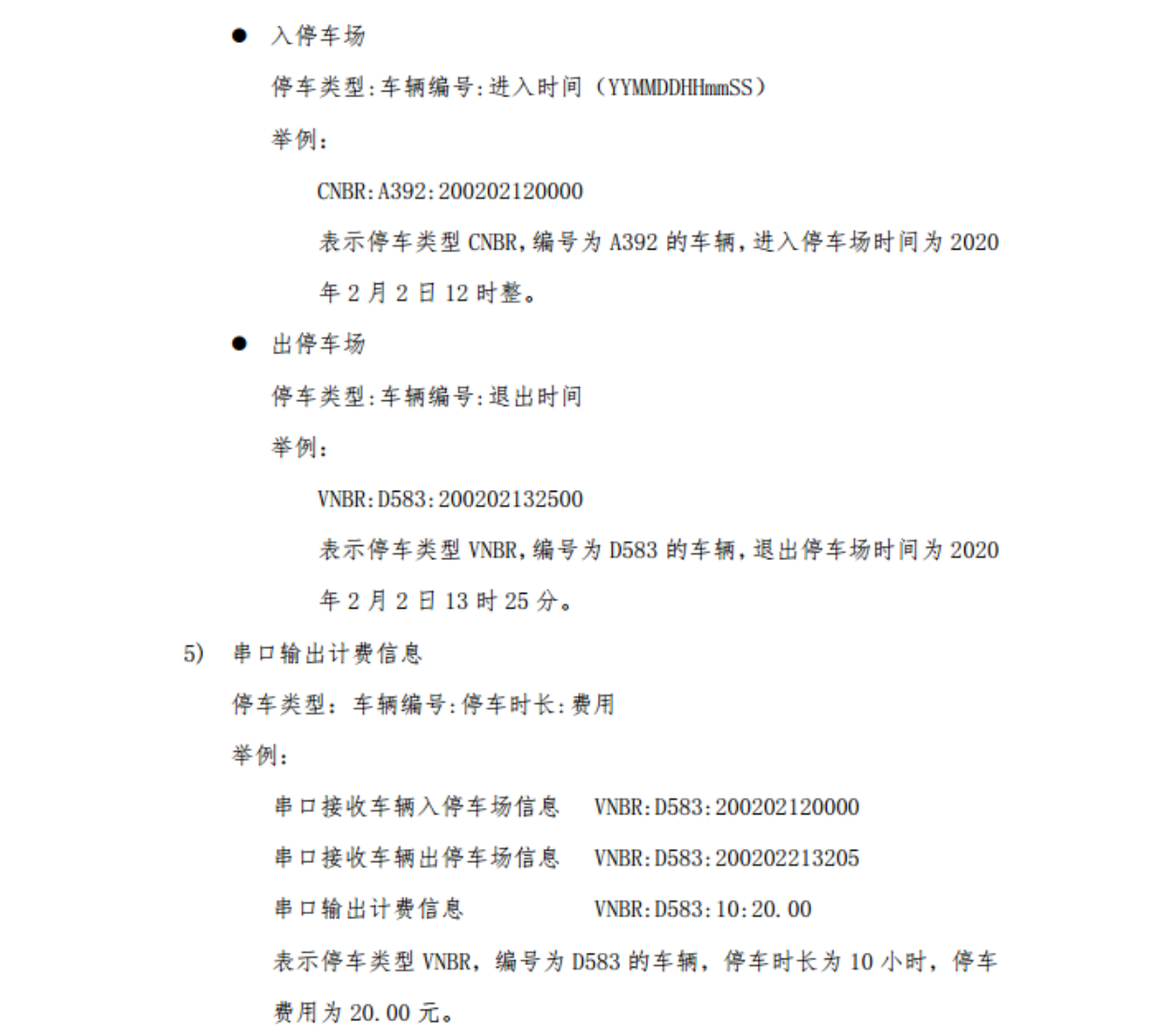
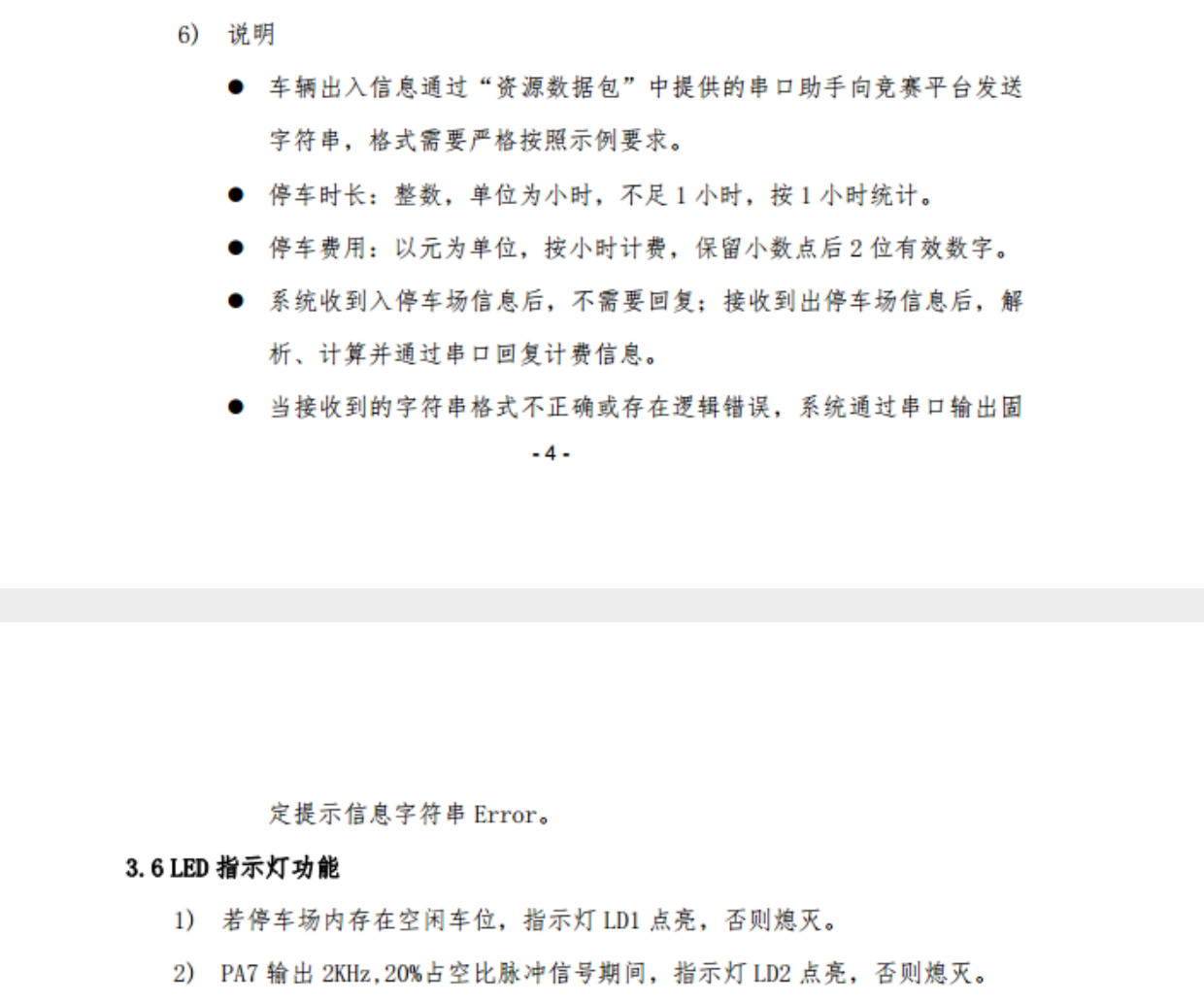
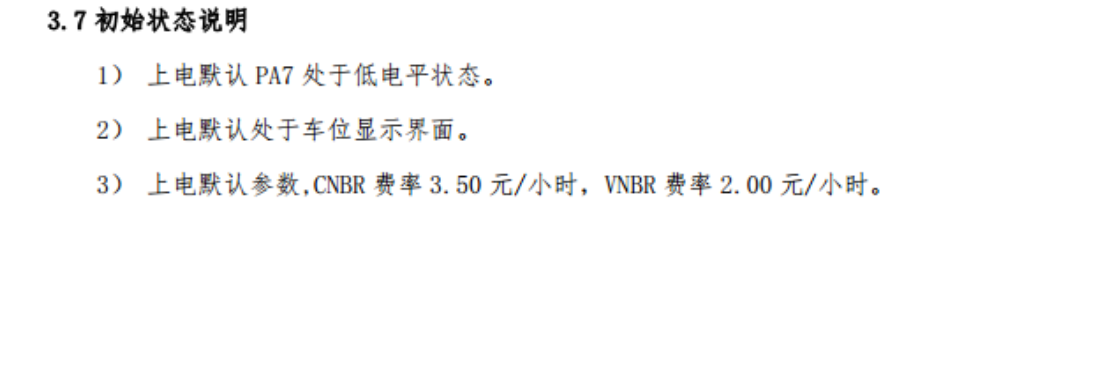
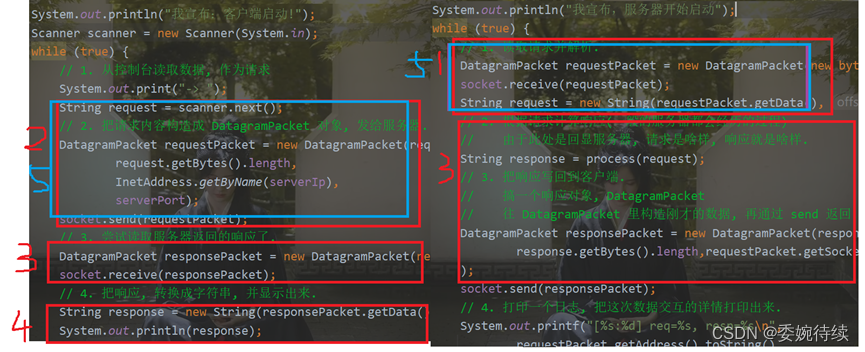
程序很常规,只有串口那里处理比较麻烦,有几个注意事项
- 使用或和与操作实现单独对led某一位进行操作
- 需要判断闰年
- 处理错误,有好几种
- sscanf解析字符串
相关文章:
蓝桥杯嵌入式第12届真题(完成) STM32G431
蓝桥杯嵌入式第12届真题(完成) STM32G431 题目 程序 main.c /* USER CODE BEGIN Header */ /********************************************************************************* file : main.c* brief : Main program body**************************…...
)
C#系列-多线程(4)
在C#中,多线程编程主要涉及使用System.Threading命名空间下的类和接口来创建和管理线程。以下是一些C#多线程编程的基本用法和示例: 1. 使用Thread类创建线程 csharp代码 using System; using System.Threading; class Program { static void …...
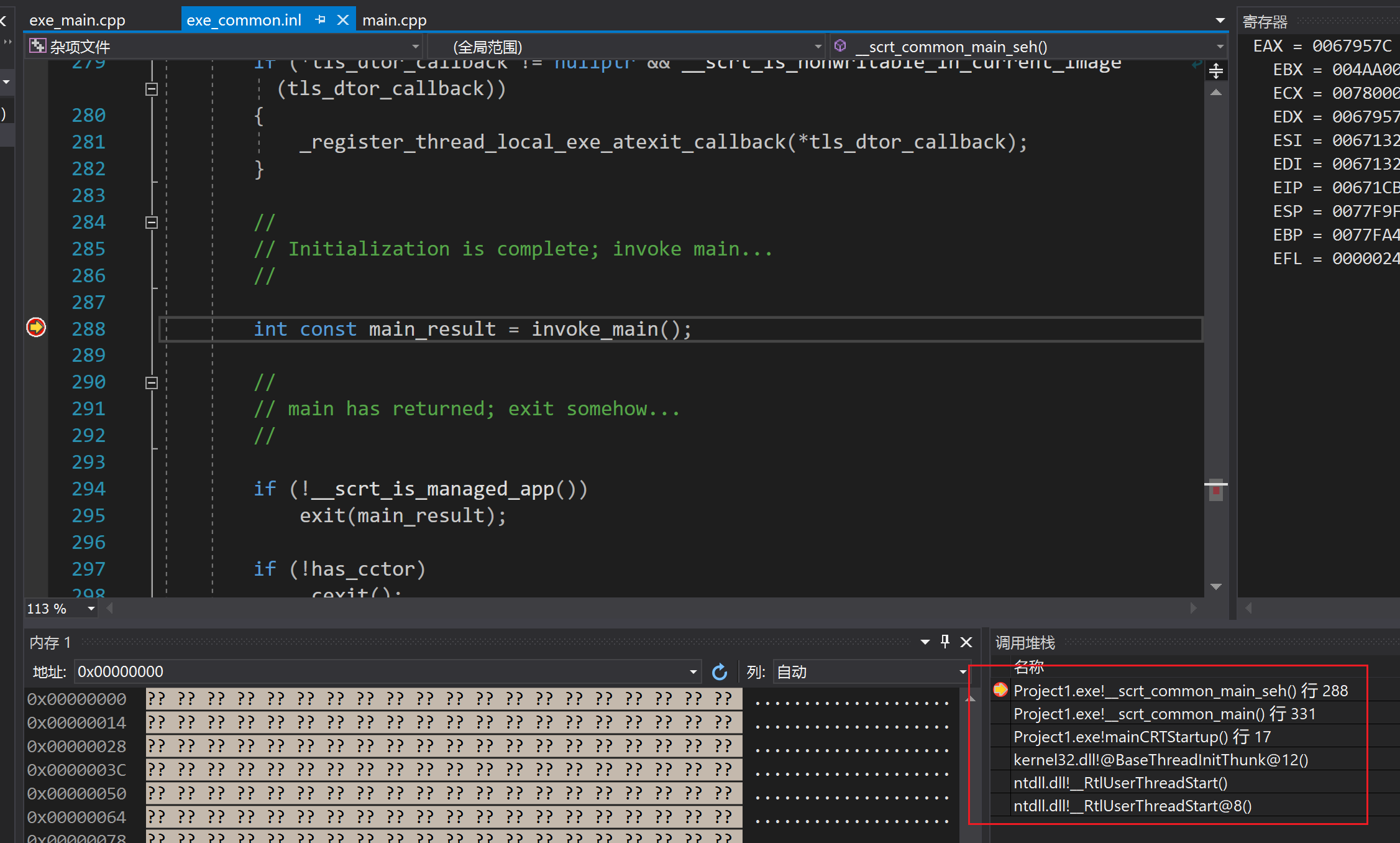
VS如何调试C运行时库
C运行时库(简称crt)是C标准库等组件的基础, 其会在进入main函数之前运行一些代码, 包括但不限于初始化堆栈, 内存分配等操作 这些代码是可以随着VC工具集一起安装到我们本地的。看一下这个情况, 就是VS调试器没找到对应的crt源码的情况, 调用堆栈是空的。为了解决这个问…...

软件工程师,超过35岁怎么办
概述 随着科技行业的飞速发展,软件开发工程师的职业道路充满了各种机遇和挑战。对于已经在这个行业摸爬滚打了十多年的软件开发工程师来说,当他们步入35岁这个年纪时,可能会感到一些迷茫和焦虑。许多人担忧,在以创新、活力、快速迭…...
)
通过 Prometheus 编写 TiDB 巡检脚本(脚本已开源,内附链接)
作者丨 caiyfc 来自神州数码钛合金战队 神州数码钛合金战队是一支致力于为企业提供分布式数据库 TiDB 整体解决方案的专业技术团队。团队成员拥有丰富的数据库从业背景,全部拥有 TiDB 高级资格证书,并活跃于 TiDB 开源社区,是官方认证合作伙…...
sql语句学习(一)--查询
【有道云笔记】基本sql语句2—查询基础 数据库表结构 DROP TABLE IF EXISTS class; CREATE TABLE class (id int(11) NOT NULL AUTO_INCREMENT,class_num varchar(11) CHARACTER SET utf8mb4 COLLATE utf8mb4_bin NOT NULL COMMENT 班级号,class_name varchar(255) CHARACTE…...
【HTML】交友软件上照片的遮罩是如何做的
笑谈 我不知道大家有没有在夜深人静的时候感受到孤苦难耐,🐶。于是就去下了一些交友软件来排遣寂寞。可惜的是,有些交友软件真不够意思,连一些漂亮小姐姐的图片都要进行遮罩,完全不考虑兄弟们的感受,😠。所…...
【Java EE初阶十二】网络编程TCP/IP协议(一)
1. 网络编程 通过网络,让两个主机之间能够进行通信->就这样的通信来完成一定的功能,进行网络编程的时候,需要操作系统给咱们提供一组API,通过这些API来完成编程;API可以认为是应用层和传输层之间交互的路径…...

element-ui解决上传文件时需要携带请求数据的问题
一、问题描述 在前端使用element-ui进行文件上传时,需要携带请求头信息,比如Token。 二、问题解决 1. 表单实现 action置空添加:http-request属性覆盖默认的上传行为,实现自定义上传文件。注意:src后的图片路径如果是个网络请求(外链)&…...

【AI视野·今日NLP 自然语言处理论文速览 第七十九期】Thu, 18 Jan 2024
AI视野今日CS.NLP 自然语言处理论文速览 Thu, 18 Jan 2024 Totally 35 papers 👉上期速览✈更多精彩请移步主页 Daily Computation and Language Papers Deciphering Textual Authenticity: A Generalized Strategy through the Lens of Large Language Semantics …...

Docker容器运行
1、通过--name参数显示地为容器命名,例如:docker run --name “my_http_server” -d httpd 2、容器重命名可以使用docker rename。 3、两种进入容器的方法: 3.1、Docker attach 例如: 每间隔一秒打印”Hello World”。 Sudo docker run…...

【计算机网络】网络层之IP协议
文章目录 1.基本概念2.协议头格式3.网段划分4.特殊的IP地址5.IP地址的数量限制6.私有IP地址和公网IP地址7.路由 1.基本概念 IP地址是定位主机的,具有一个将数据报从A主机跨网络可靠的送到B主机的能力。 但是有能力就一定能做到吗,只能说有很大的概率。…...
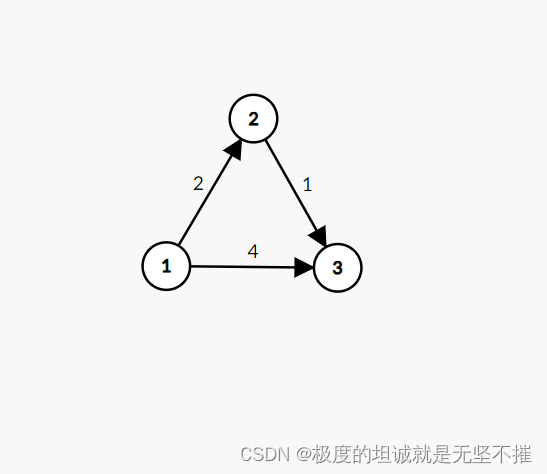
2024/2/17 图论 最短路入门 dijkstra 1
目录 算法思路 Dijkstra求最短路 AcWing 849. Dijkstra求最短路 I - AcWing 850. Dijkstra求最短路 II - AcWing题库 最短路 最短路 - HDU 2544 - Virtual Judge (vjudge.net) 【模板】单源最短路径(弱化版) P3371 【模板】单源最短路径…...
交通管理|交通管理在线服务系统|基于Springboot的交通管理系统设计与实现(源码+数据库+文档)
交通管理在线服务系统目录 目录 基于Springboot的交通管理系统设计与实现 一、前言 二、系统功能设计 三、系统实现 1、用户信息管理 2、驾驶证业务管理 3、机动车业务管理 4、机动车业务类型管理 四、数据库设计 1、实体ER图 五、核心代码 六、论文参考 七、最新计…...
最适合初学者的Python入门详细攻略,一文讲清,赶紧收藏!
前言 目前python可以说是一门非常火爆的编程语言,应用范围也非常的广泛,工资也挺高,未来发展也极好。 Python究竟应该怎么学呢,我自己最初也是从零基础开始学习Python的,给大家分享Python的学习思路和方法。一味的买…...

幻兽帕鲁新手游戏攻略分享
在幻兽帕鲁中,提高实力是玩家不断追求的目标。以下是一些提高实力的攻略: 1、升级和进化:通过战斗和完成任务,玩家可以获得经验值,提升自己的等级。随着等级的提升,玩家可以获得技能点,用于提升…...
代码随想录算法训练营DAY19 | 二叉树 (6)
一、LeetCode 654 最大二叉树 题目链接:654.最大二叉树https://leetcode.cn/problems/maximum-binary-tree/ 思路:坚持左开右闭原则,递归划分数组元素生成左右子树。 class Solution {public TreeNode constructMaximumBinaryTree(int[] num…...

【C++】实现Date类的各种运算符重载
上一篇文章只实现了operator操作符重载,由于运算符较多,该篇文章单独实现剩余所有的运算符重载。继续以Date类为例,实现运算符重载: 1.Date.h #pragma once#include <iostream> #include <assert.h>using namespace …...
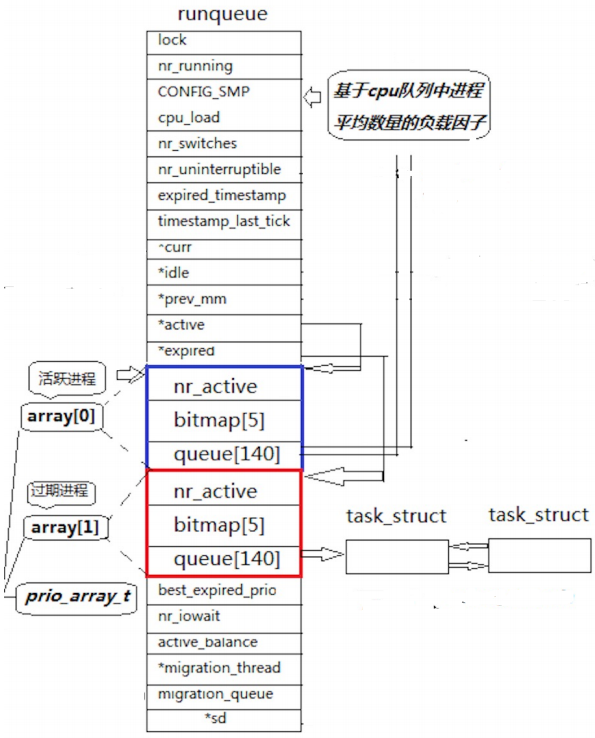
【Linux】程序地址空间 -- 详解 Linux 2.6 内核进程调度队列 -- 了解
一、程序地址空间回顾 在学习 C/C 时,我们知道内存会被分为几个区域:栈区、堆区、全局/静态区、代码区、字符常量区等。但这仅仅是在语言层面上的理解,是远远不够的。 如下空间布局图,请问这是物理内存吗? 不是&…...

10-通用类型、特质和生命周期
上一篇: 09-错误处理 每种编程语言都有有效处理概念重复的工具。在 Rust 中,泛型就是这样一种工具:具体类型或其他属性的抽象替身。我们可以表达泛型的行为或它们与其他泛型的关系,而不需要知道在编译和运行代码时它们的位置。 函…...

Boomi 与 Gong 达成合作,将 Revenue AI 引入 Boomi Agentstudio
Gong 的 Revenue AI 现已原生集成至 Boomi Enterprise Platform 面向 AI 时代的数据激活公司 Boomi 今日宣布,与 Revenue AI 领域领导者 Gong 达成合作,将 Gong 捕获的营收信号原生整合至 Boomi Enterprise Platform。通过此次合作,企业可构…...

终极指南:如何一键重置JetBrains IDE试用期,免费获得全新30天评估时间
终极指南:如何一键重置JetBrains IDE试用期,免费获得全新30天评估时间 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter JetBrains IDE试用期重置是每个开发者都需要的实用技能,当…...
)
别再死磕PI参数了!用MATLAB/Simulink手把手教你搭建异步电机FOC仿真(附模型下载)
异步电机FOC仿真实战:从零搭建到参数调优全指南 在电机控制领域,矢量控制(FOC)技术因其优异的动态性能和效率表现,已成为工业应用中的主流方案。然而从理论到实践的跨越往往充满挑战——许多工程师能够理解Park变换、空间矢量调制等概念&…...

从VBS到VBE:一次搞懂Windows脚本编码器的前世今生与实战避坑
从VBS到VBE:Windows脚本编码器的技术考古与安全实践 在Windows系统管理的工具箱里,VBScript(VBS)曾经是自动化任务的瑞士军刀。尽管如今PowerShell和现代编程语言已成为主流,但理解VBScript及其编码器(VBE&…...

OpenClaw 中最经典的 6 款skill,真正能进工作流的 skills
2026 开年至今,AI 圈里两个词出镜率最高:龙虾 和 Skill。 龙虾更像一阵风——话题来得快,讨论散得也快;Skill 却在慢慢变成能天天用的东西:装一次,反复省时间。 可惜市面上不少 Skill 推荐文不太耐看&…...
的完整用法)
别让拼写检查器坑了你的代码!Visual Studio中自定义排除字典(exclusion.dic)的完整用法
深度定制Visual Studio拼写检查:打造团队专属的exclusion.dic解决方案 当你在Visual Studio中看到熟悉的红色波浪线时,第一反应可能是代码出现了语法错误。但仔细一看,却发现是拼写检查器在提醒你"Hint"不是一个有效的英文单词。这…...

藏在Modbus‘写寄存器’请求里的秘密:用Python+pyshark复现CISCN2023流量分析
藏在Modbus‘写寄存器’请求里的秘密:用Pythonpyshark复现CISCN2023流量分析 当生产网络流量中出现异常数据包时,传统的手动分析方式往往效率低下。本文将带你用Pythonpyshark构建自动化分析流水线,从海量Modbus协议数据中快速定位可疑通信模…...

SAP EWM实战:从产品到处理单位,两种库存转移操作保姆级教程
SAP EWM库存转移实战指南:产品与处理单位的精准操作 在仓库管理的日常工作中,库存转移是最基础却最容易出错的环节之一。特别是对于刚接触SAP EWM系统的管理员来说,面对不同形态的物料——散件产品和带包装的处理单位(HU),往往会产…...

如何高效掌握LAMMPS:分子动力学模拟的完整实战指南
如何高效掌握LAMMPS:分子动力学模拟的完整实战指南 【免费下载链接】lammps Public development project of the LAMMPS MD software package 项目地址: https://gitcode.com/gh_mirrors/la/lammps 想要快速掌握强大的分子动力学模拟工具吗?LAMM…...

联发科天玑700/720/900核心板选型指南:5G物联网与智能硬件性能功耗全解析
1. 项目概述:从核心板选型看5G入门级应用的性能锚点 在嵌入式开发和智能硬件领域,选择一颗合适的核心板(Core Board)往往是项目成败的第一步。它集成了处理器、内存、基带、射频等核心部件,直接决定了产品的性能基线、…...