STM32自学☞输入捕获测频率和占空比案例
本文是通过PA0口输出PWM波,然后通过PA6口捕获PWM波的频率和占空比,最终在oled屏上显示我们自己设置的频率和占空比。由于和前面的pwm呼吸灯代码有重合部分所以本文中的代码由前者修改而来,对于文件命名不要在意。
pwm_led.c文件
/*
编写步骤
1.RCC开启时钟(TIM、GPIO)
2.配置时基单元
3.配置输出比较单元
4.配置GPIO
5.运行控制
*/
#include "stm32f10x.h"
#include "stm32f10x_tim.h"
#include "pwm_led.h"
//初始化函数
void PWM_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*输出比较初始化*/
TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量
TIM_OCStructInit(&TIM_OCInitStructure); //结构体初始化,若结构体没有完整赋值则最好执行此函数,给结构体所有成员都赋一个默认值,避免结构体初值不确定的问题
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式,选择PWM模式1
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始的CCR值
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //将结构体变量交给TIM_OC1Init,配置TIM2的输出比较通道1
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
/*改变占空比函数*/
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare); //设置CCR1的值
}
/*通过设置psc的值来调节频率*/
void PWM_SetPrescaler(uint16_t Prescaler)
{
TIM_PrescalerConfig(TIM2,Prescaler,TIM_PSCReloadMode_Immediate); //写入一个值,立刻生效
}
pwm_led.h文件
#ifndef _PWM_LED_H
#define _PWM_LED_H
#include "stdint.h"
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
void PWM_SetPrescaler(uint16_t Prescaler);
#endif
ic.c文件
#include "stm32f10x.h"
#include "stm32f10x_tim.h"
#include "ic.h"
/*初始化函数步骤
1.开启GPIO和TIM的时钟
2.GPIO初始化并把GPIO配置为输入模式
3.配置时基单元,让CNT计数器在内部时钟驱动下自增运行
4.配置输入捕获单元
5.选择从模式的触发源
6.选择触发后执行的操作
7.开启定时器
*/
void IC_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //开启TIM3的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为复用推挽输出,受外设控制的引脚,均需要配置为复用模式
/*配置时钟源*/
TIM_InternalClockConfig(TIM3); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*初始化输入捕获单元*/
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICInitStruct.TIM_Channel=TIM_Channel_1; //通道
TIM_ICInitStruct.TIM_ICFilter=0XF; //输入捕获的滤波器
TIM_ICInitStruct.TIM_ICPolarity=TIM_ICPolarity_Rising; //上升沿触发
TIM_ICInitStruct.TIM_ICPrescaler=TIM_ICPSC_DIV1; //不分频
TIM_ICInitStruct.TIM_ICSelection=TIM_ICSelection_DirectTI; //触发信号从直连通道输入
/*
TIM_ICInit(TIM3,&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel=TIM_Channel_2; //通道
TIM_ICInitStruct.TIM_ICFilter=0XF; //输入捕获的滤波器
TIM_ICInitStruct.TIM_ICPolarity=TIM_ICPolarity_Falling; //下降沿触发
TIM_ICInitStruct.TIM_ICPrescaler=TIM_ICPSC_DIV1; //不分频
TIM_ICInitStruct.TIM_ICSelection=TIM_ICSelection_IndirectTI; //触发信号交叉通道输入
*/
//下面用这个函数更简单,效果上面注销的代码一样
TIM_PWMIConfig(TIM3,&TIM_ICInitStruct);
/*配置从模式的触发源*/
TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);
/*配置从模式为Reset*/
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);
//使能
TIM_Cmd(TIM3,ENABLE);
}
//获取频率的函数
uint32_t IC_GetFreq(void)
{
return 1000000/(TIM_GetCapture1(TIM3)+1);
}
//获取占空比的函数
uint32_t IC_GetDuty(void)
{
return TIM_GetCapture2(TIM3)*100/(TIM_GetCapture1(TIM3)+1);
}
ic.h文件
#ifndef _IC_H
#define _IC_H
#include "stdint.h"
void IC_Init(void);
uint32_t IC_GetFreq(void);
uint32_t IC_GetDuty(void);
#endif
main.c文件
#include "stm32f10x.h"
#include "stm32f10x_tim.h"
#include "delay.h"
#include "OLED.h"
#include "pwm_led.h"
#include "ic.h"
int main (void)
{
/*模块初始化*/
OLED_Init();
PWM_Init();
IC_Init();
OLED_ShowString(1,1,"Freq:00000HZ");
OLED_ShowString(2,1,"Duty:00%");
PWM_SetPrescaler(7200-1);
PWM_SetCompare1(80);
while(1)
{
OLED_ShowNum(1,6,IC_GetFreq(),5);
OLED_ShowNum(2,6,IC_GetDuty(),2);
}
}
相关文章:

STM32自学☞输入捕获测频率和占空比案例
本文是通过PA0口输出PWM波,然后通过PA6口捕获PWM波的频率和占空比,最终在oled屏上显示我们自己设置的频率和占空比。由于和前面的pwm呼吸灯代码有重合部分所以本文中的代码由前者修改而来,对于文件命名不要在意。 pwm_led.c文件 /* 编写步…...
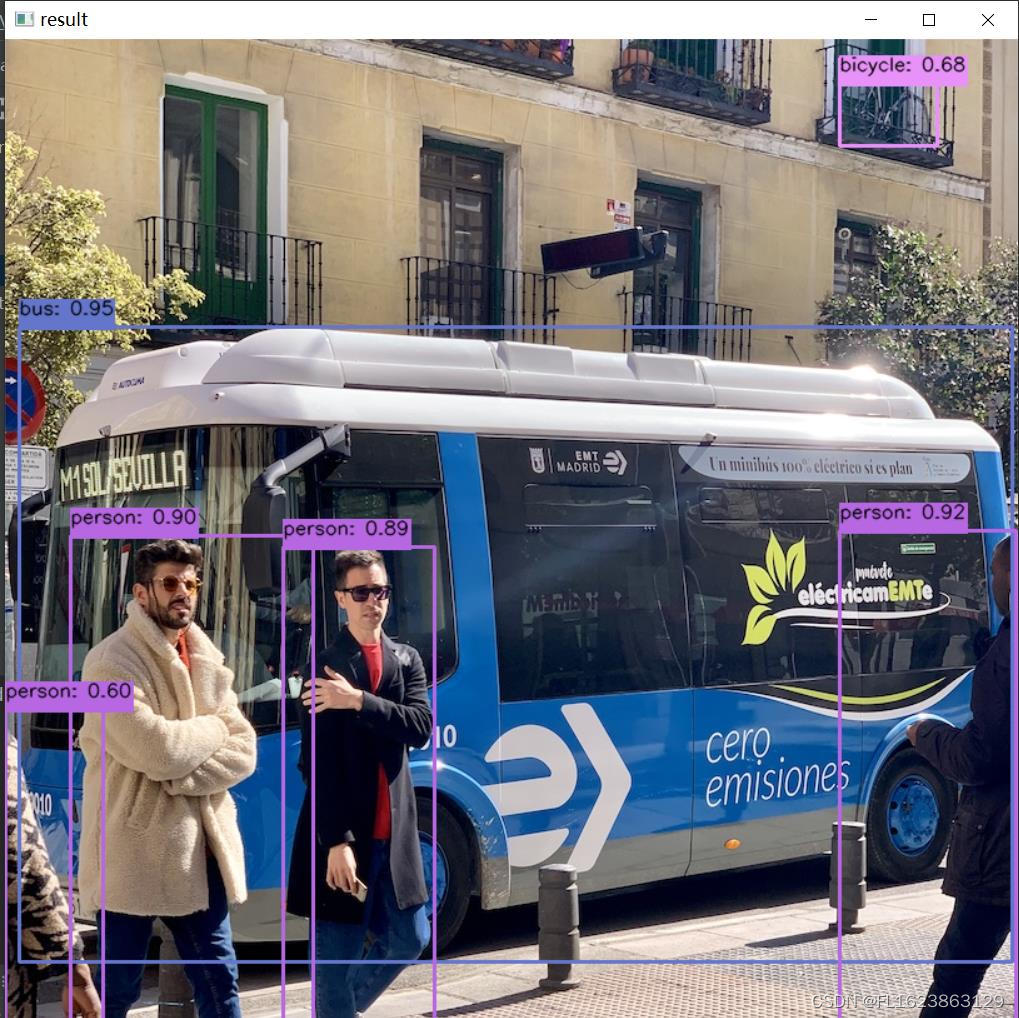
[yolov9]使用python部署yolov9的onnx模型
【框架地址】 https://github.com/WongKinYiu/yolov9 【yolov9简介】 在目标检测领域,YOLOv9 实现了一代更比一代强,利用新架构和方法让传统卷积在参数利用率方面胜过了深度卷积。 继 2023 年 1 月 正式发布一年多以后,YOLOv9 终于来了&a…...

ShellExecute的用法
1、标准用法 ShellExecute函数原型及参数含义如下: function ShellExecute(hWnd: HWND; Operation, FileName, Parameters,Directory: PChar; ShowCmd: Integer): HINST; stdcall; ●hWnd:用于指定父窗口句柄。当函数调用过程出现错误时,它将…...

蓝桥杯:递增三元组
题目 递增三元组(2018年蓝桥杯真题) 题目描述: 给定三个整数数组 A [A1, A2, … AN], B [B1, B2, … BN], C [C1, C2, … CN], 请你统计有多少个三元组(i, j, k) 满足: 1 < i, j, k < N Ai < Bj &…...
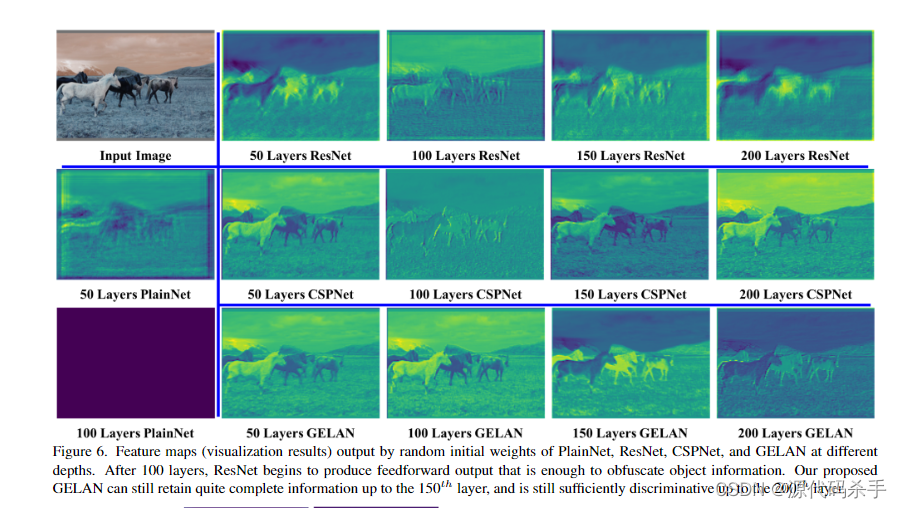
目标检测卷王YOLO卷出新高度:YOLOv9问世
论文摘要:如今的深度学习方法重点关注如何设计最合适的目标函数,使得模型的预测结果能够最接近真实情况。 同时,必须设计一个适当的架构,可以帮助获取足够的信息进行预测。 现有方法忽略了一个事实,即当输入数据经过逐层特征提取和空间变换时,大量信息将会丢失。 本文将深…...
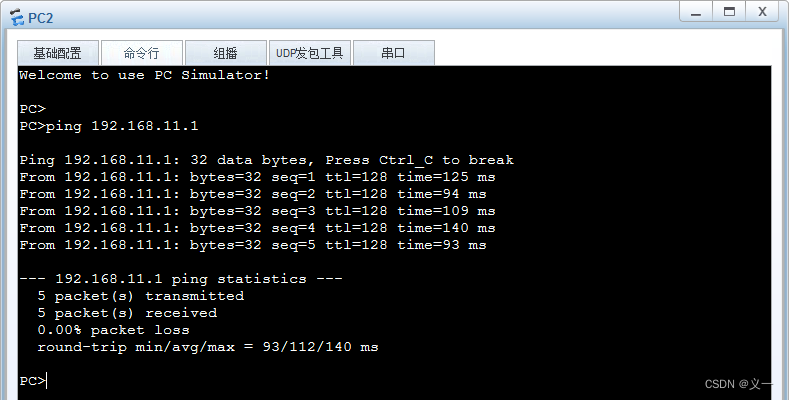
华为---RSTP(二)---RSTP基本配置示例
目录 1. 示例要求 2. 网络拓扑图 3. 配置命令 4. 测试终端连通性 5. RSTP基本配置 5.1 启用STP 5.2 修改生成树协议模式为RSTP 5.3 配置根交换机和次根交换机 5.4 设置边缘端口 6. 指定端口切换为备份端口 7. 测试验证网络 1. 示例要求 为防止网络出现环路…...
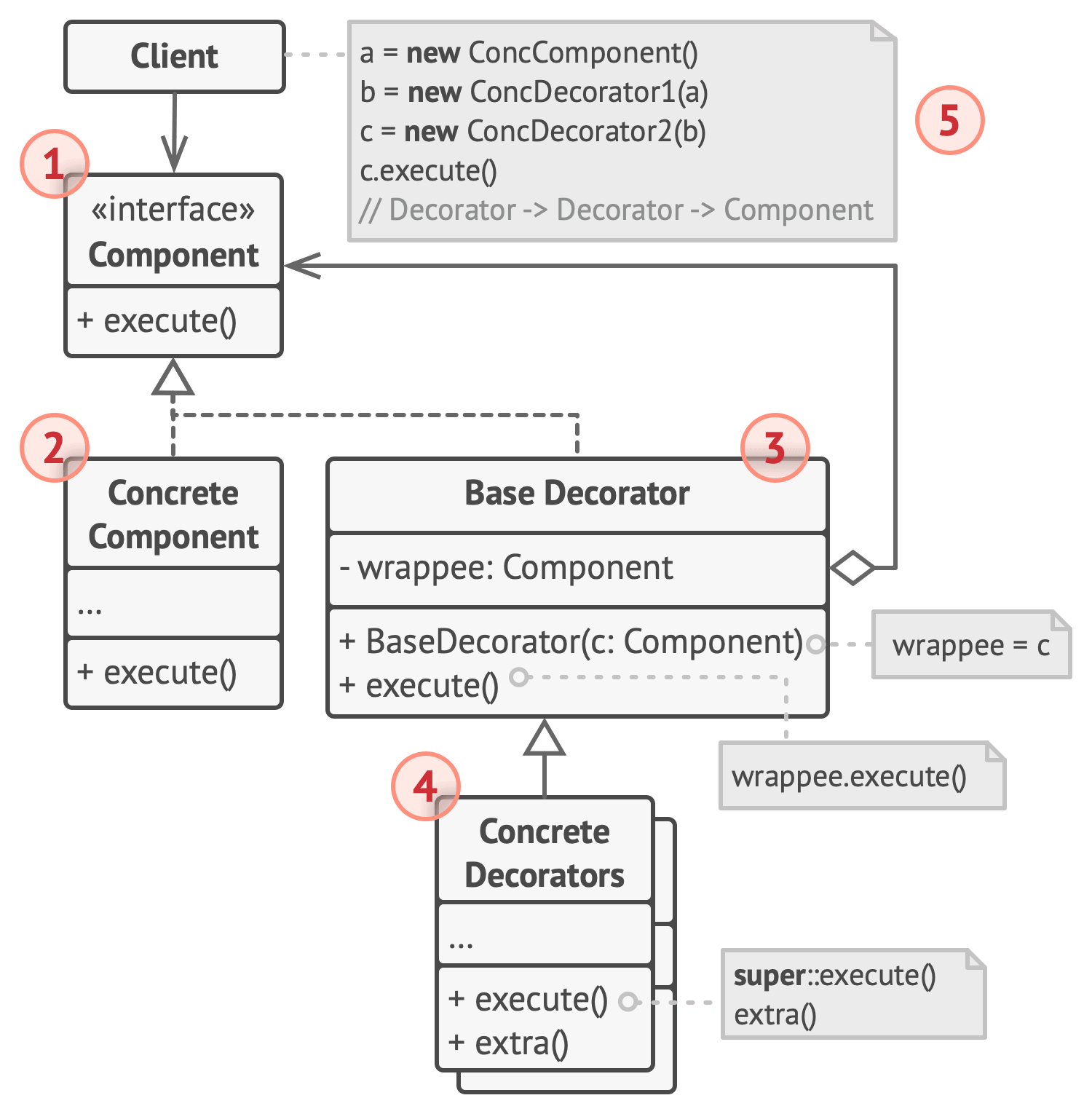
【Python笔记-设计模式】装饰器模式
一、说明 装饰器模式是一种结构型设计模式,旨在动态的给一个对象添加额外的职责。 (一) 解决问题 不改变原有对象结构的情况下,动态地给对象添加新的功能或职责,实现透明地对对象进行功能的扩展。 (二) 使用场景 如果用继承来扩展对象行…...
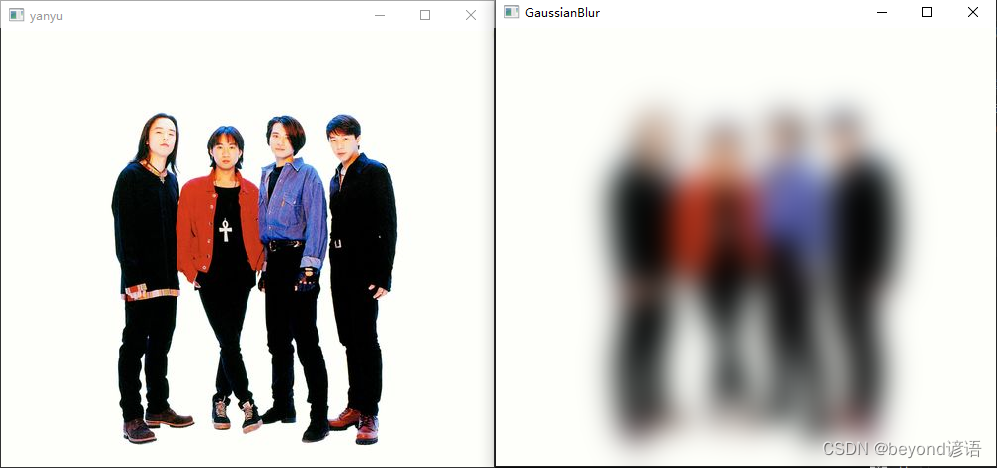
二十八、图像的高斯模糊操作
项目功能实现:对一张图片进行高斯模糊操作 按照之前的博文结构来,这里就不在赘述了 更多的图像模糊操作原理可参考博文:七、模糊操作,里面有详细原理讲解,只不过代码是python写的。 一、头文件 gaussian_blur.h #p…...
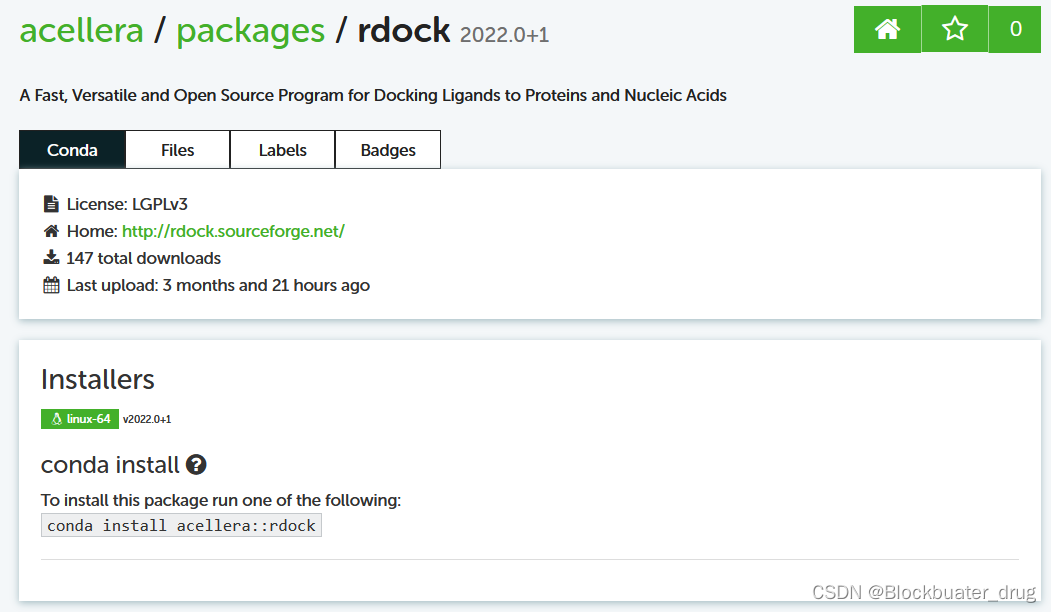
开源分子对接程序rDock的安装及使用流程
欢迎浏览我的CSND博客! Blockbuater_drug …点击进入 前言 本文介绍开源分子对接程序rDock在Linux Ubuntu 22.04系统上的conda安装、编译安装过程及程序使用流程。 一、rDock是什么? rDock来源 rDock是一个快速、多功能的开源对接程序,可用…...

【JavaEE】_tomcat的安装与使用
目录 1. Tomcat简介 2. Tomcat安装 2.1 下载Tomcat并解压缩 2.2 启动Tomcat 2.2.1 Tomcat乱码问题 2.2.2 Tomcat闪退问题 2.3 访问Tomcat欢迎页面 3. 使用Tomcat部署前端代码 3.1 路径匹配 3.2 文件路径访问与网络访问 4. 静态页面与动态页面 5. 基于tomcat的网站后…...

实现一个Windows环境一键启停Oracle的bat脚本
Oracle数据库有许多优点,其中一些最重要的包括: 可靠性和稳定性: Oracle数据库经过长期的发展和测试,被广泛认为是非常可靠和稳定的数据库管理系统。它在大型企业和关键业务环境中被广泛应用,能够处理高负载和大规模的数据。 高性能: Oracle数据库具有优化的查询处理器和…...
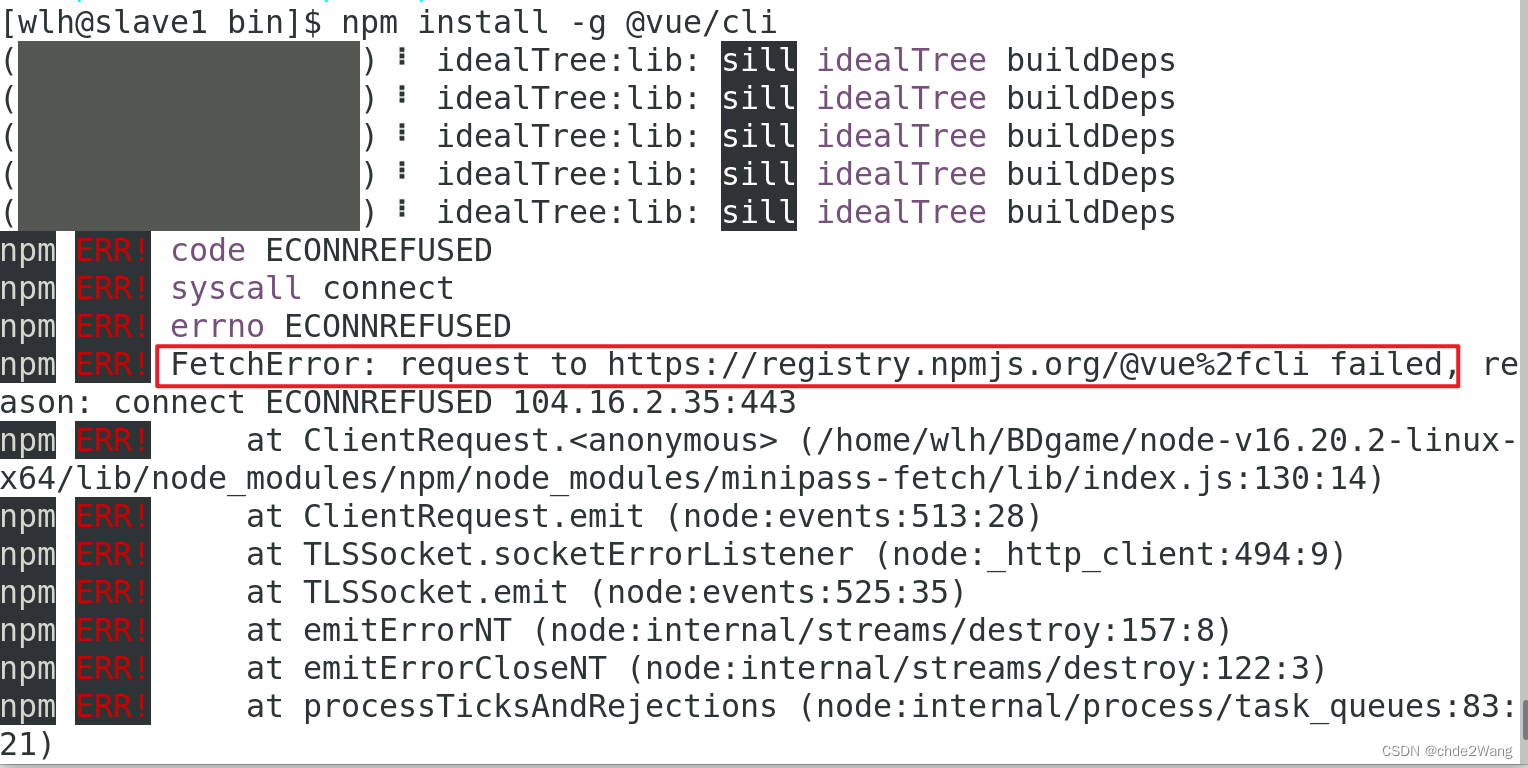
大数据-数据可视化-环境部署vue+echarts+显示案例
文章目录 一、安装node.js1 打开火狐浏览器,下载Node.js2 进行解压3 配置环境变量4 配置生效二、安装vue脚手架1 下载vue脚手架,耐心等待。三、创建vue项目并启动1 创建2 启动四、下载echarts.js与axios.js到本地。五、图表显示demo【以下所有操作均在centos上进行】 一、安…...

spark超大数据批量写入redis
利用spark的分布式优势,一次性批量将7000多万的数据写入到redis中。 # 配置spark接口 import os import findspark from pyspark import SparkConf from pyspark.sql import SparkSession os.environ["JAVA_HOME"] "/usr/local/jdk1.8.0_192"…...

C# Socket的使用
C# 中的 System.Net.Sockets.Socket 类是 .NET Framework 提供的核心类,用于处理网络套接字编程。Socket 类是用于网络编程的基础类,它位于 System.Net.Sockets 命名空间中。 使用 Socket 类,可以创建客户端和服务器应用程序来进行基于TCP、…...

Spring Cloud + Vue前后端分离-第17章 生产打包与发布
源代码在GitHub - 629y/course: Spring Cloud Vue前后端分离-在线课程 Spring Cloud Vue前后端分离-第17章 生产打包与发布 17-1 注册中心配置中心Nacos 注册中心 Nacos 快速开始 | Nacos 本节内容:使用nacos作注册中心配置中心,不用eureka Nacos…...

力扣热题100_普通数组_56_合并区间
文章目录 题目链接解题思路解题代码 题目链接 56. 合并区间 以数组 intervals 表示若干个区间的集合,其中单个区间为 intervals[i] [starti, endi] 。请你合并所有重叠的区间,并返回 一个不重叠的区间数组,该数组需恰好覆盖输入中的所有区…...
)
Springcloud OpenFeign 的实现(二)
Springcloud OpenFeign 的实现(一) 一、Feign request/response 压缩 您可以考虑为您的外部请求启用请求或响应GZIP压缩。您可以通过启用以下属性之一来完成此操作: feign.compression.request.enabledtrue feign.compression.response.en…...
[C++]智能指针用法
一、智能指针存在的意义 智能指针主要解决以下问题: (1)内存泄漏:内存手动释放,使用智能指针可以自动释放。 (2)共享所有权指针的传播和释放,比如多线程使用同一个对象时析构问题…...

六、行列式基本知识
目录 1、行列式的特性 2、行列式的计算方法: 2.1 通过行列式的定义去计算:对角法则。 2. 2 利用行列式的性质将行列式转化为上三角行列式: ①行列式的性质 : 性质一: 性质二: 性质三: 性质四:行列式之间的加法...
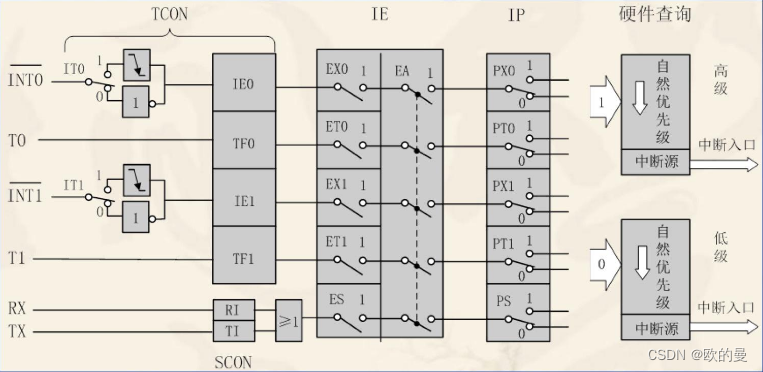
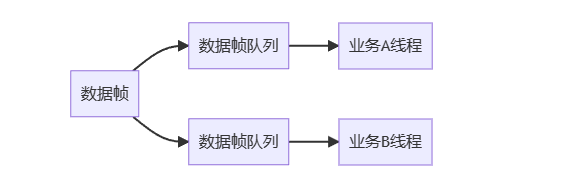
中断系统(详解与使用)
讲解 简介 中断是指计算机运行过程中,出现某些意外情况需主机干预时,机器能自动停止正在运行的程序并转入处理新情况的程序,处理完毕后又返回原被暂停的程序继续运行。 假设一个人在家看电视,这时候突然门铃响了,这个人此时就要停止看电视去开门,然后关上门后继续回来…...

解密猫抓:当浏览器成为你的私人视频档案管理员
解密猫抓:当浏览器成为你的私人视频档案管理员 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否曾盯着浏览器中那个精彩的在线讲座…...

CCPD车牌数据集预处理避坑指南:透视变换原理详解与OpenCV实战
CCPD车牌数据集预处理避坑指南:透视变换原理详解与OpenCV实战 车牌识别系统中,数据预处理的质量直接影响模型性能。CCPD作为目前最全面的中文车牌数据集,其四点标注特性为透视变换提供了基础,但也暗藏诸多陷阱。本文将手把手带您穿…...
)
新手也能看懂的TCAD入门:用Sentaurus和Silvaco分别跑一个NPN三极管(附完整代码)
TCAD新手实战指南:从零开始仿真NPN三极管 1. 初识TCAD:半导体仿真的利器 在微电子领域,TCAD(Technology Computer-Aided Design)工具如同设计师的"数字实验室",让我们能在计算机上模拟半导体器件…...

2026年主流抓娃娃App大对比,哪个才是你的“抓宝神器”?
在当今快节奏的生活中,年轻人面临着来自学业、工作、社交等多方面的压力。为了缓解这些压力,寻找适合的解压方式成为了大家的共同需求。抓娃娃App作为一种新兴的娱乐方式,正逐渐受到年轻人的喜爱。下面我们就从潮流趋势、科技前沿、行业洞察等…...

技术视角:Sketchfab数据提取工具深度解析3D模型下载机制
技术视角:Sketchfab数据提取工具深度解析3D模型下载机制 【免费下载链接】sketchfab sketchfab download userscipt for Tampermonkey by firefox only 项目地址: https://gitcode.com/gh_mirrors/sk/sketchfab 在WebGL技术日益成熟的今天,Sketch…...

别再只盯着CSI-2了!用示波器实测MIPI D-PHY波形,手把手教你排查Camera不通的硬件问题
别再只盯着CSI-2了!用示波器实测MIPI D-PHY波形,手把手教你排查Camera不通的硬件问题 调试Camera模块时,MIPI信号问题往往是硬件工程师最头疼的挑战之一。当系统出现图像异常、花屏或无法识别时,大多数工程师的第一反应是检查CSI-…...

使用mcp-maker快速构建AI工具集成服务器:从MCP协议到实践
1. 项目概述:一个为AI应用注入“超能力”的MCP服务器工厂 如果你最近在折腾AI应用开发,特别是想给ChatGPT、Claude这类大模型配上“手和脚”,让它们能操作你的本地文件、查询数据库,甚至控制你的智能家居,那你大概率已…...

基于AutoHotkey的Windows桌面自动化工具开发实战
1. 项目概述与核心价值最近在整理个人项目库时,翻到了一个挺有意思的“老伙计”——cua_desktop_operator_skill。这个项目名听起来有点拗口,直译过来是“CUA桌面操作员技能”。乍一看,可能会让人联想到某种工业控制台的专用软件。但实际上&a…...

期权交易基础框架:模块化设计与Python实现指南
1. 项目概述:一个为期权交易者打造的“乐高积木”底座如果你在量化交易或者期权策略开发领域摸爬滚打过一段时间,大概率会遇到一个共同的痛点:策略想法很多,但把它们变成可回测、可实盘、可管理的代码,却要耗费大量的“…...

Godot游戏集成Discord状态:RPC插件原理与实战指南
1. 项目概述:在Godot引擎中点亮你的Discord状态 如果你是一名独立游戏开发者,或者正在用Godot引擎捣鼓一些有趣的个人项目,你可能会想让你的朋友或社区成员知道你现在正在“玩”什么。不是通过截图发到社交媒体,而是更实时、更优…...