九、计算机视觉-形态学基础概念
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、形态学的基本概念
- 1.1 定义
- 1.2 结构元素
- 1.3 形态学操作
- 二、形态学的应用
- 总结
前言
现在开始后面几课将介绍计算机视觉中的形态学理论和技术,包括基本的形态学操作、形态学滤波、形态学轮廓分析等内容。包括如何应用形态学方法来处理图像以及解决实际问题。
本节课将简要介绍形态学,但如果您对此部分不感兴趣或理解困难,可以跳过。在后续课程中,我们将通过实际案例来详细讲解形态学,以帮助您更好地理解和应用。
一、形态学的基本概念
1.1 定义
形态学是一种基于数学形态学理论的图像处理方法,在图像处理中,形态学主要通过结构元素和一系列基本的形态学操作来描述和处理图像中的特征。形态学操作基于结构元素在图像上的移动和变换,以实现对图像形状和结构的分析、增强和提取。
1.2 结构元素
形态学操作的核心是结构元素,通常是一个小的二值图像,用于描述要进行形态学操作的特征。结构元素可以是任何形状和大小,常见的形状包括矩形、圆形、十字形等。这个怎么理解呢
结构元素就像是一块模具,它决定了我们要对图像做什么样的处理。这块模具可以是任何形状和大小,比如方形、圆形、十字形等。当我们把这块模具放到图像上时,模具中的白色部分会和图像中的像素进行匹配,而黑色部分则不会。
举个例子,假设我们用一个方形的结构元素来进行腐蚀操作。这个方形模具会和图像中的每个像素进行匹配,如果模具完全覆盖了图像中的某个区域,那么这个区域的像素就会被保留下来,否则就会被去掉。
所以,结构元素的形状和大小会影响到我们最终得到的图像效果。不同形状和大小的结构元素可以用来实现不同的图像处理效果,比如增强图像的边缘、去除图像的噪声等。
1.3 形态学操作
形态学操作基于结构元素在图像上的移动和变换来实现图像处理。常见的形态学操作包括膨胀、腐蚀、开运算、闭运算等。
二、形态学的应用
形态学在图像处理中有广泛的应用,包括但不限于以下方面:
- 图像增强和滤波:形态学滤波可以用于去除图像中的噪声、增强图像边缘等。
- 图像分割:形态学操作可以帮助分割图像中的对象和背景,提取感兴趣的区域。
- 边缘检测:形态学操作可以检测图像中的边缘和轮廓,用于物体识别和分析。
- 形状分析:形态学可以用于提取和分析图像中对象的形状和结构特征,如面积、周长、凸包等。
- 模式识别:形态学可以用于识别图像中的模式和结构,用于目标检测和识别。
总结
形态学是图像处理中的重要技术之一,它提供了一种有效的方法来分析、处理和提取图像中的形状和结构特征。通过结构元素和基本形态学操作,可以实现对图像的各种复杂特征的描述和处理,为图像分析和计算机视觉任务提供了有力的工具。
通过了解形态学的定义和应用,您可以更好地理解它在图像处理中的重要性和作用
相关文章:

九、计算机视觉-形态学基础概念
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、形态学的基本概念1.1 定义1.2 结构元素1.3 形态学操作 二、形态学的应用总结 前言 现在开始后面几课将介绍计算机视觉中的形态学理论和技术,包…...
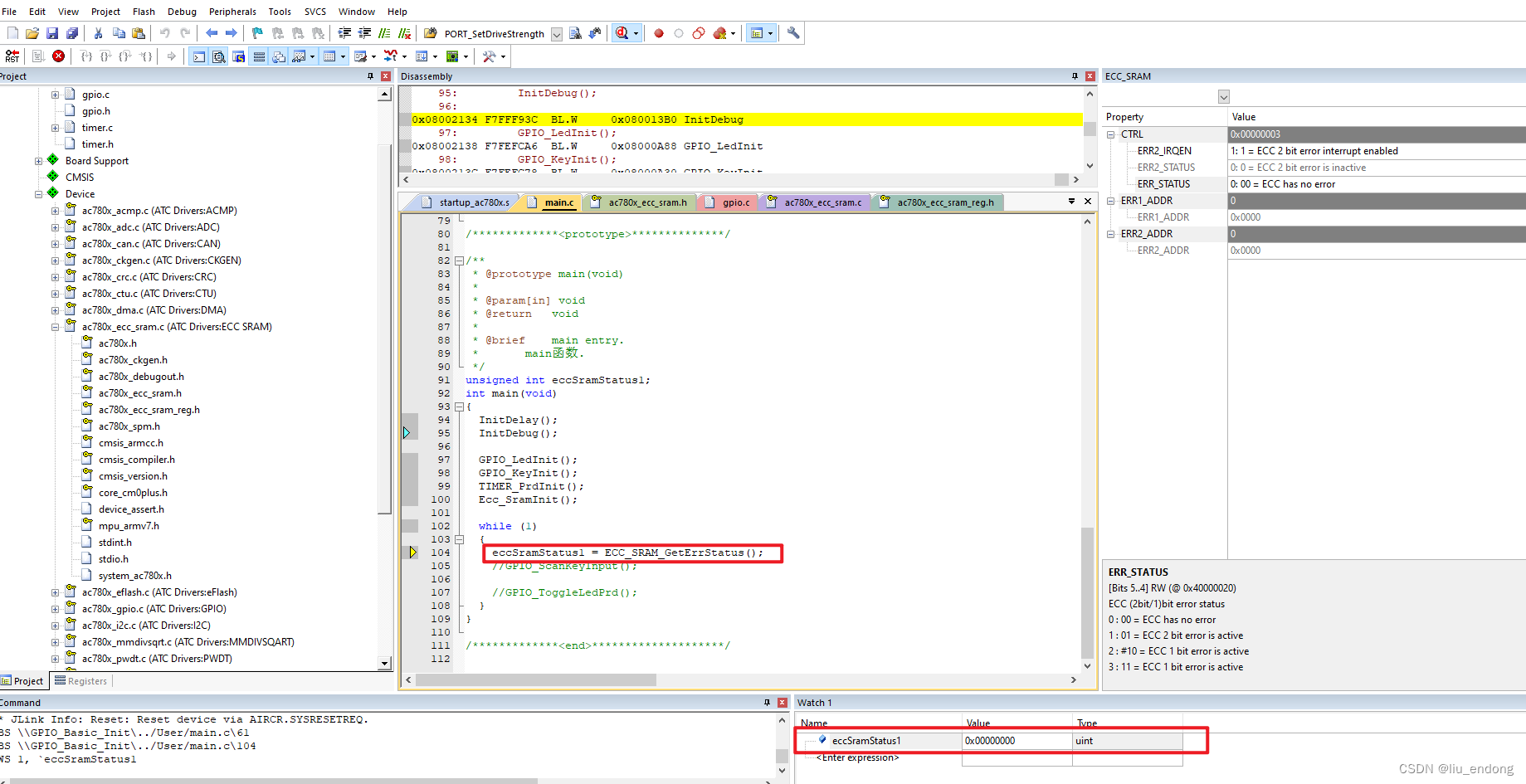
杰发科技AC7801——SRAM 错误检测纠正
0.概述 7801暂时无错误注入,无法直接进中断看错误情况,具体效果后续看7840的带错误注入的测试情况。 1.简介 2.特性 3.功能 4.调试 可以看到在库文件里面有ecc_sram的库。 在官方GPIO代码里面写了点测试代码 成功打开2bit中断 因为没有错误注入&#x…...
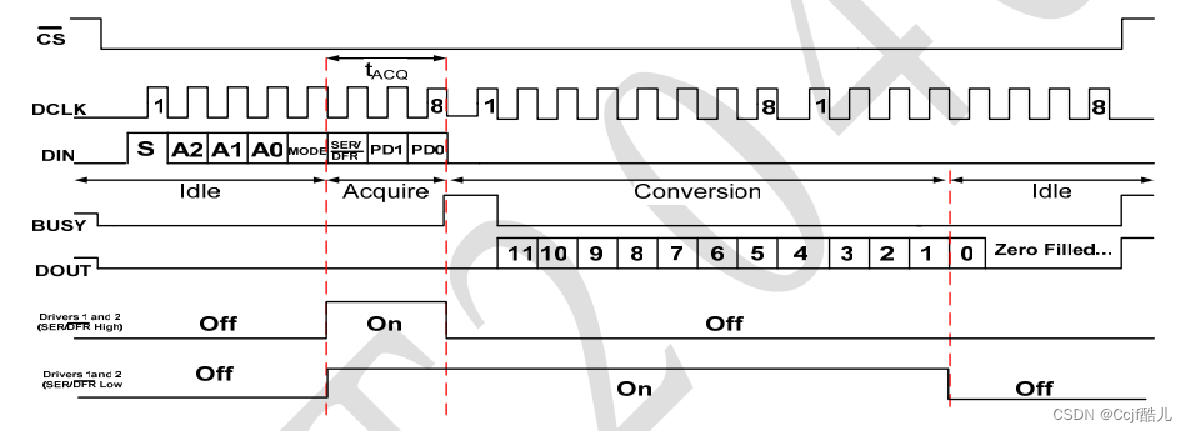
普中51单片机学习(AD转换)
AD转换 分辨率 ADC的分辨率是指使输出数字量变化一个相邻数码所需输入模拟电压的变化量。常用二进制的位数表示。例如12位ADC的分辨率就是12位,或者说分辨率为满刻度的1/(2^12)。 一个10V满刻度的12位ADC能分辨输入电压变化最小值是10V1/(2^12 )2.4mV。 量化误差 …...

YoloV8改进策略:主干网络改进|MogaNet——高效的多阶门控聚合网络
文章目录 摘要1、简介2、相关工作2.1、视觉Transformers2.2、ViT时代的卷积网络3、从多阶博弈论交互的角度看表示瓶颈4、方法论4.1、MogaNet概述4.2、多阶门控聚合4.3、通过通道聚合进行多阶特征重新分配4.4、实现细节5、实验5.1、ImageNet分类5.2、密集预测任务5.3、消融实验和…...

Sora:OpenAI引领创新浪潮的AI视频模型
Sora:OpenAI引领创新浪潮的AI视频模型 OpenAI作为人工智能领域的佼佼者,接下来,让我们一起深入了解Sora的技术特点、应用场景以及它对未来创作方式的潜在影响。 首先,让我们来探讨Sora的技术特点。Sora是一种基于深度学习的视频生…...

torch报错:[winerror 126] 找不到指定的模块torch_python.dll“ or one of its dependencies.
[winerror 126] 找不到指定的模块。 error loading "d:\miniconda\envs\action_env\lib\site-packages\torch\lib\torch_python.dll" or one of its dependencies. 在使用这个yolov5模块的时候发现了这个错误,错误原因是因为python版本和torch版本冲突。…...
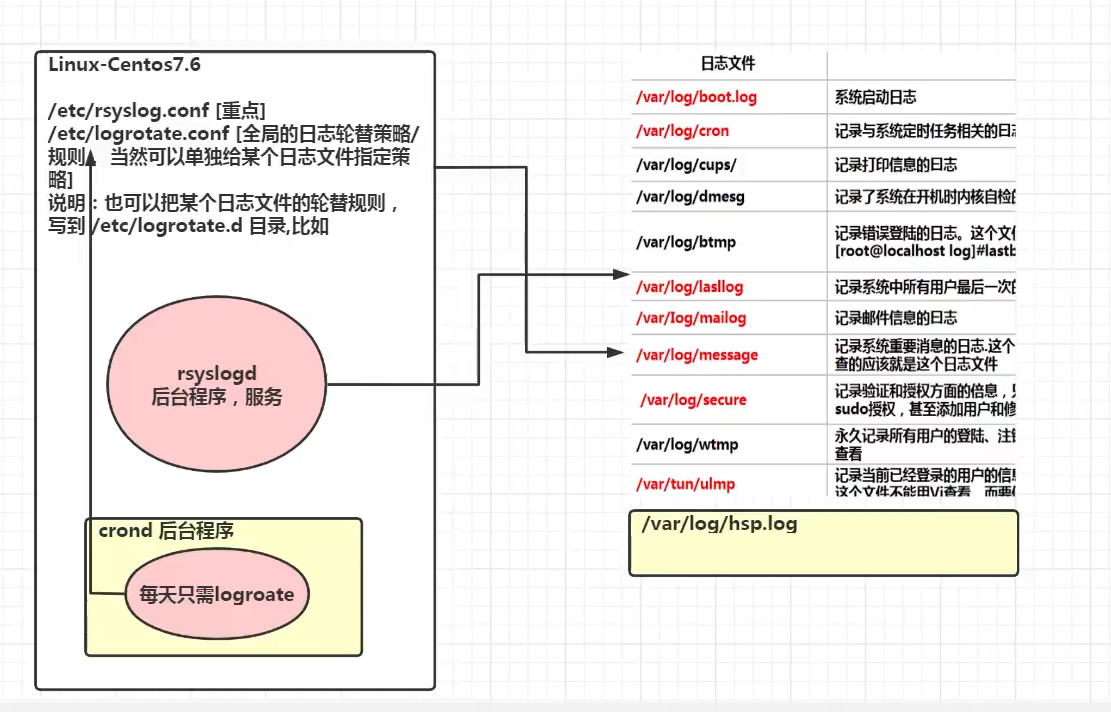
Linux日志轮替
文章目录 1. 基本介绍2. 日志轮替文件命名3. logrotate 配置文件4. 把自己的日志加入日志轮替5. 日志轮替机制原理6. 查看内存日志 1. 基本介绍 日志轮替就是把旧的日志文件移动并改名,同时建立新的空日志文件,当旧日志文件超出保存的范围之后ÿ…...

Docker Container(容器)
"在哪里走散,你都会找到我~" Docker 容器 什么是容器? 通俗来讲,容器是镜像运行的实体。我们对于镜像的认知是,“存储在磁盘上的只读文件”。当我们启动一个容器的本质,就是启动一个进程,即容器…...

week04day03(爬虫 beautifulsoup4、)
一. 使用bs4解析网页 下载bs4 - pip install beautifulsoup4 使用的时候 import bs4专门用于解析网页的第三方库 在使用bs4的时候往往会依赖另一个库lxml pip install lxml 网页代码 <!DOCTYPE html> <html><head><meta charset"utf-8"><…...
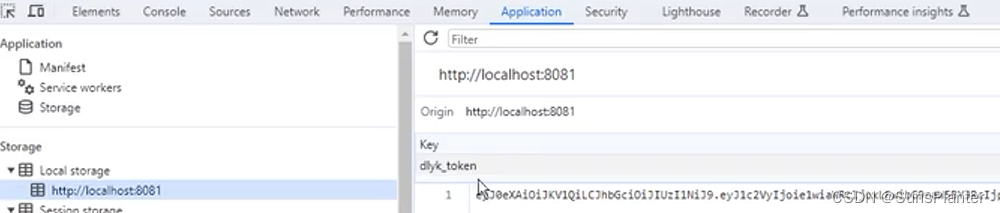
04 动力云客之登录后获取用户信息+JWT存进Redis+Filter验证Token + token续期
1. 登录后获取用户信息 非常好实现. 只要新建一个controller, 并调用SS提供的Authentication对象即可 package com.sunsplanter.controller;RestController public class UserController {GetMapping(value "api/login/info")public R loginInfo(Authentication a…...
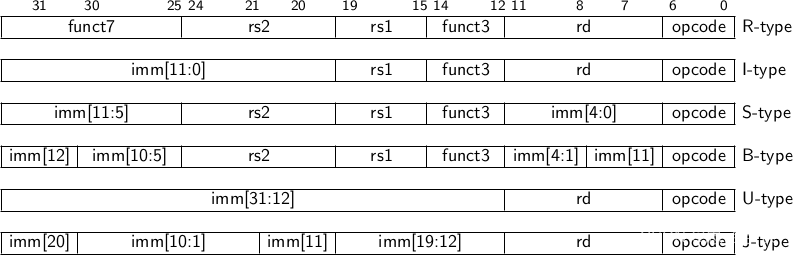
RISC-V知识总结 —— 指令集
资源1: RISC-V China – RISC-V International 资源2: RISC-V International – RISC-V: The Open Standard RISC Instruction Set Architecture 资源3: RV32I, RV64I Instructions — riscv-isa-pages documentation 1. 指令集架构的类型 在讨论RISC-V或任何处理器架构时&…...

基于Java jsp+mysql+Spring的汽车出租平台租赁网站平台设计和实现
基于Java jspmysqlSpring的汽车出租平台租赁网站平台设计和实现 博主介绍:5年java开发经验,专注Java开发、定制、远程、文档编写指导等,csdn特邀作者、专注于Java技术领域 作者主页 央顺技术团队 Java毕设项目精品实战案例《1000套》 欢迎点赞 收藏 ⭐留…...
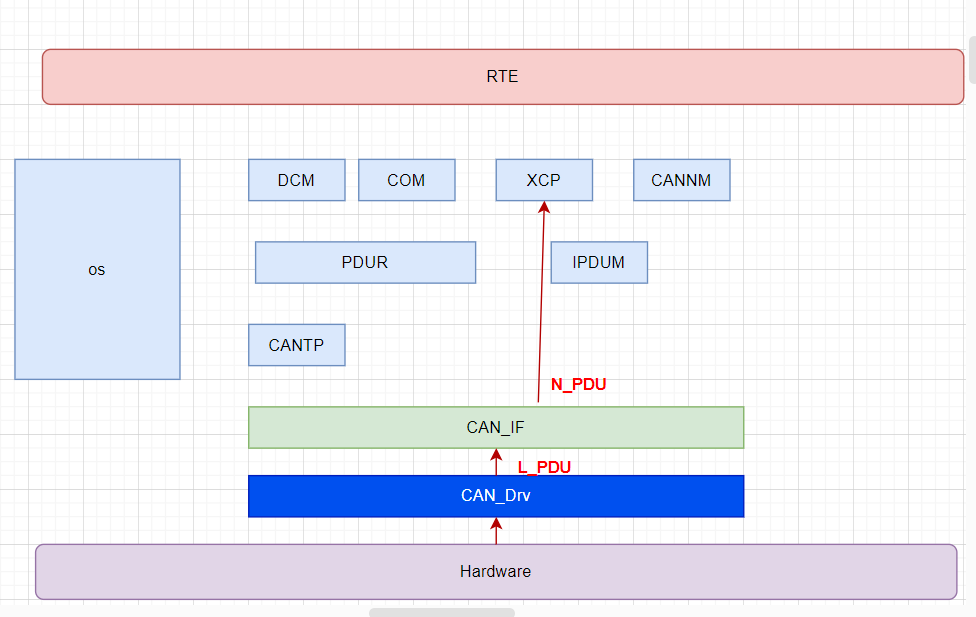
[AutoSar]BSW_Com 01 Can通信入门
目录 关键词平台说明一、车身CAN简介二、相关模块三、Can报文分类及信号流路径3.1 应用报文3.2 应用报文(多路复用multiplexer)3.3 诊断报文3.4 网络管理报文3.5 XCP报文(标定报文) 关键词 嵌入式、C语言、autosar、OS、BSW 平台…...

离散数学 第七单元 tree
目录 树的定义 树的特点 Spanning Tree 生成树(重要!) 生成树算法 DFS 深度优先 BFS 广度优先 Minimun Spanning Tree 最小生成树 Kruscal算法 Prim算法 根树 根数的遍历 前序遍历 中序遍历 后序遍历 表达式的二叉树 中缀…...
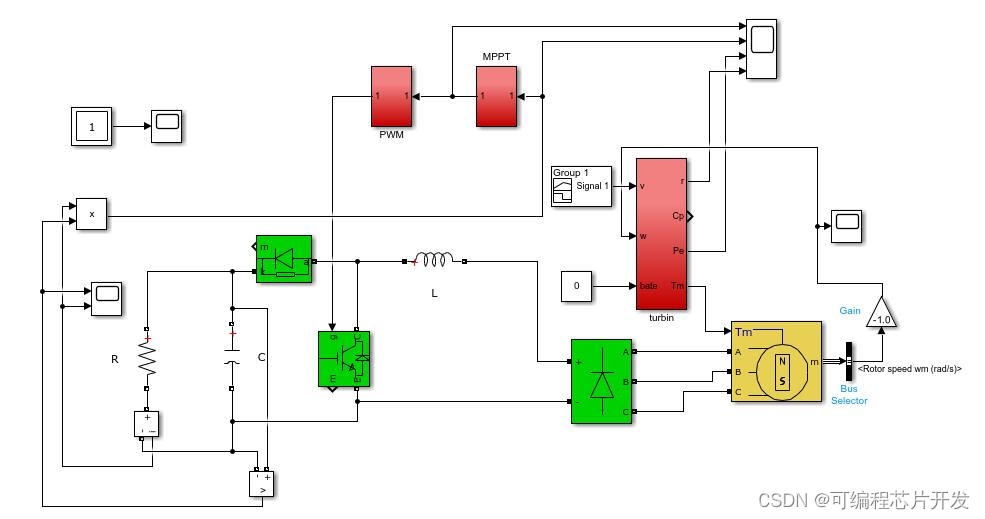
基于MPPT最大功率跟踪算法的涡轮机控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于MPPT最大功率跟踪算法的涡轮机控制系统simulink建模与仿真.mppt采用爬山法实现,仿真输出MPPT控制效果,功率,转速等。 2.系统仿真结果 …...

Hbase和Clickhouse对比简单总结
Hbase和Clickhouse是两种不同的数据库系统,它们各自适用于不同的场景。以下是两者之间的对比: 数据模型: HBase 是一种基于列的存储系统,它适合处理大规模的数据集,特别是那些需要快速随机访问的场景。ClickHouse 则是…...
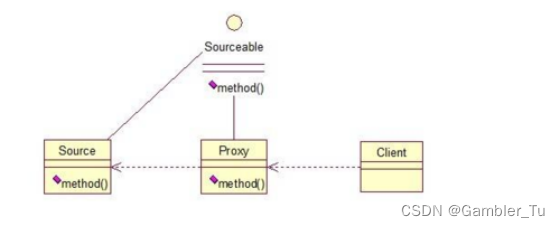
Spring基础之AOP和代理模式
文章目录 理解AOPAOP的实现原理 AOP代理模式静态代理动态代理1-JDK动态代理2-CGLIB动态代理 总结 理解AOP OOP - - Object Oriented Programming 面向对象编程 AOP - - Aspect Oriented Programming 面向切面编程 AOP是Spring提供的关键特性之一。AOP即面向切面编程࿰…...

二层交换机和三层交换机区别
01、二层交换机 二层交换机,也被称为数据链路层交换机,是在OSI模型的数据链路层(第二层)进行数据交换的设备。它基于MAC(Media Access Control)地址来转发数据包,实现局域网内部的数据传输 1、…...
【Java程序设计】【C00267】基于Springboot的在线考试系统(有论文)
基于Springboot的在线考试系统(有论文) 项目简介项目获取开发环境项目技术运行截图 项目简介 本系统是基于Springboot的在线考试系统;本系统主要分为管理员、教师和学生三种角色; 管理员登录系统后,可以对首页&#x…...
——代码随想录算法训练营Day41)
【LeetCode】416. 分割等和子集(中等)——代码随想录算法训练营Day41
题目链接:416. 分割等和子集 题目描述 给你一个 只包含正整数 的 非空 数组 nums 。请你判断是否可以将这个数组分割成两个子集,使得两个子集的元素和相等。 示例 1: 输入:nums [1,5,11,5] 输出:true 解释&#x…...

FanControl终极指南:免费开源的风扇控制神器,轻松解决Windows散热与噪音问题
FanControl终极指南:免费开源的风扇控制神器,轻松解决Windows散热与噪音问题 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https:…...

计算机科学第三难题:“树映射”问题在文件、写作、建筑、生物分类中无处不在!
计算机科学第三难题:将通用图映射到层次结构,“树映射”问题无处不在 根据一个归属于 菲尔卡尔顿 的 经典笑话,计算机科学只有两个难题:命名和缓存失效。这两个问题之所以难,是因为没有算法可以解决它们:好…...

AutoCut终极指南:如何用文本编辑器快速剪辑100个视频
AutoCut终极指南:如何用文本编辑器快速剪辑100个视频 【免费下载链接】autocut 用文本编辑器剪视频 项目地址: https://gitcode.com/GitHub_Trending/au/autocut 还在为手动剪辑视频而烦恼吗?AutoCut项目让你告别复杂的视频编辑软件,通…...

树莓派扩展板EYESPI Pi Beret:简化硬件连接,加速原型开发
1. 项目概述:为什么我们需要EYESPI Pi Beret?玩树莓派的朋友,尤其是喜欢捣鼓屏幕和传感器的,肯定都经历过那个阶段:面对一堆杜邦线,对照着屏幕驱动板的引脚定义,一个个数着树莓派的GPIO针脚&…...

Go语言构建开发者命令行工具箱:navis项目架构与实现解析
1. 项目概述:一个为开发者打造的“导航”工具箱最近在GitHub上看到一个挺有意思的项目,叫navis,作者是NaveenBuidl。光看名字,你可能会联想到“导航”或者“航行”,没错,这个项目的核心定位就是一个为开发者…...

82.人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案
人工智能实战:大模型多环境治理怎么做?从开发、测试、预发到生产的 Prompt、模型、知识库隔离方案 一、问题场景:测试环境改了 Prompt,结果生产回答变了 很多大模型项目早期只有一个环境: 一套 Prompt 一个知识库 一个模型地址 一个配置表开发、测试、运营都在同一套配置…...

基于React的记忆管理UI组件库:openclaw-memory-ui实战指南
1. 项目概述:一个为记忆管理而生的开源UI组件库最近在折腾一个需要处理大量结构化记忆数据的项目,比如知识库、笔记应用或者智能助手的历史对话管理。这类应用的核心痛点在于,数据本身是复杂的、多维的,但传统的列表或表格展示方式…...

GitHub自动化运维:构建模块化Operator集提升开发效率
1. 项目概述:一个为GitHub开发者量身定制的“操作集”如果你是一个重度GitHub用户,无论是维护个人项目、参与开源贡献,还是管理团队仓库,大概率都经历过这样的场景:每天要重复执行一堆琐碎但必要的操作。比如ÿ…...

Chrome 扩展 uMatrix 被弃用,MV3 环境下 matrix³ 原型尝试实现其功能
Chrome 扩展 uMatrix 被弃用,MV3 环境下如何实现其功能?matrix 原型来尝试 曾经有一款很棒的 Chrome 扩展程序叫 uMatrix,它由 uBlock Origin 的开发者 Raymond Hill 编写,是一种直观控制网站权限和子资源请求的工具。 它看上去是…...
)
藏文语音生成准确率从61.2%跃升至94.8%:ElevenLabs Fine-tuning私有数据集构建全流程(含217小时母语者录音标注规范)
更多请点击: https://intelliparadigm.com 第一章:藏文语音生成技术演进与ElevenLabs适配挑战 藏文作为具有复杂音节结构、声调隐含性及丰富上下文依赖的黏着语系文字,其语音合成长期受限于高质量标注语料稀缺、音素-音节映射不唯一、以及缺…...