【ROS学习笔记11】ROS元功能包与launch文件的使用
【ROS学习笔记11】ROS元功能包与launch文件的使用
文章目录
- 【ROS学习笔记11】ROS元功能包与launch文件的使用
- 前言
- 一、ROS元功能包
- 二、ROS节点运行管理launch文件
- 2.1 launch文件标签之launch
- 2.2 launch文件标签之node
- 2.3 launch文件标签之include
- 2.4 launch文件标签之remap
- 2.5 launch文件标签之param
- 2.6 launch文件标签之rosparam
- 2.7 launch文件标签之group
- 2.8 launch文件标签之arg
- Reference
写在前面,本系列笔记参考的是AutoLabor的教程,具体项目地址在 这里
前言
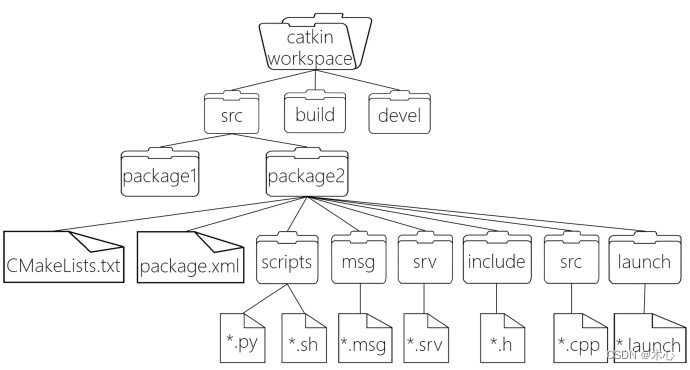
ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现:
可能包含多台主机;
每台主机上又有多个工作空间(workspace);
每个的工作空间中又包含多个功能包(package);
每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称;
每个节点可能还会设置一个或多个话题(topic)…
一、ROS元功能包
**场景:**完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划…等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 …
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
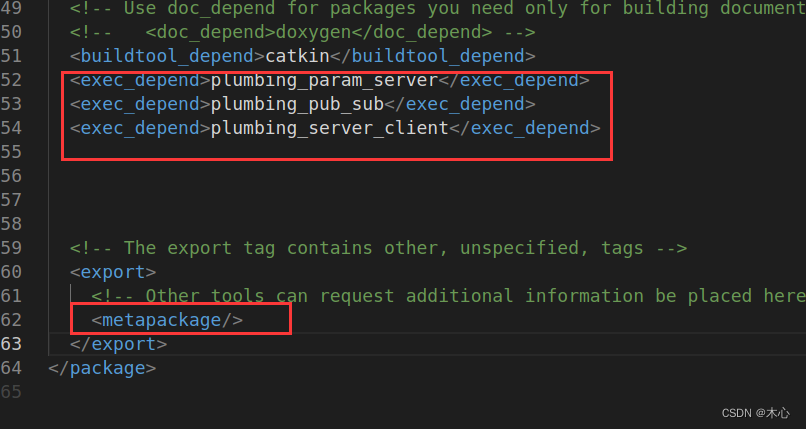
先,新建一个功能包,不需要新增依赖,然后修改package.xml,内容如下:
<exec_depend>被集成的功能包</exec_depend>.....<export><metapackage /></export>
最后,修改CMakeLists.txt,内容如下:CMakeLists不可以有换行,否则会导致编译失败。
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
另请参考:
- http://wiki.ros.org/catkin/package.xml#Metapackages
举一个新建元功能包的示例:
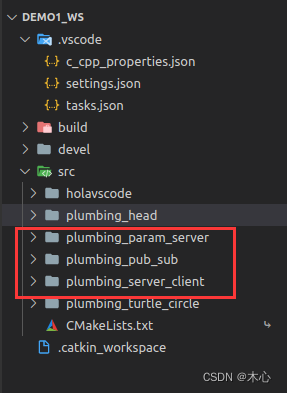
想新建一个MetaPackage将上面三个功能包整合到一起,我们可以这样做,首先新建一个元功能包,并且不包含任何依赖。

这里直接为空就可以。
然后修改package.xml,如下:
然后修改CMakeLists.txt,如下:

二、ROS节点运行管理launch文件
关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到:
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
采用的优化策略便是使用roslaunch 命令集合 launch 文件启动管理节点,并且在后续教程中,也多次使用到了 launch 文件。
概念
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用
简化节点的配置与启动,提高ROS程序的启动效率。
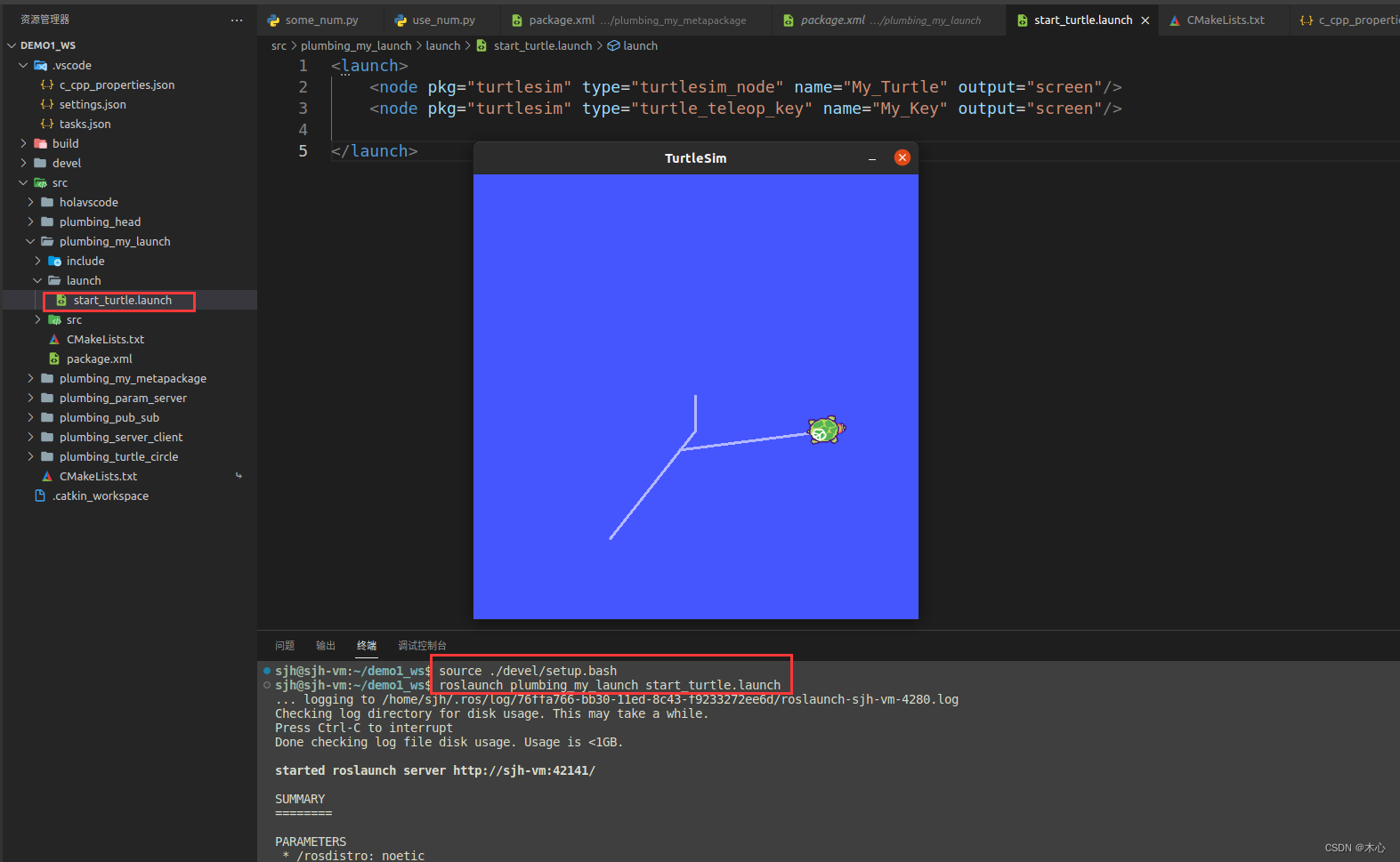
1、新建launch文件
在功能包下添加 launch目录, 目录下新建 xxxx.launch 文件,编辑 launch 文件
<launch><node pkg="turtlesim" type="turtlesim_node" name="myTurtle" output="screen" /><node pkg="turtlesim" type="turtle_teleop_key" name="myTurtleContro" output="screen" />
</launch>
2、调用launch文件
roslaunch 包名 xxx.launch
注意: roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
示例效果如下:
2.1 launch文件标签之launch
<launch>标签是所有launch文件的根标签,充当其他标签的容器
1、属性
deprecated="弃用声明"
告知用户当前launch文件已经被启用
2、子集标签
所有其他标签都是launch的子集标签
示例:

2.2 launch文件标签之node
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
1、属性
-
pkg=“包名”
节点所属的包
-
type=“nodeType”
节点类型(与之相同名称的可执行文件)
-
name=“nodeName”
节点名称(在 ROS 网络拓扑中节点的名称)
-
args=“xxx xxx xxx” (可选)
将参数传递给节点
-
machine=“机器名”
在指定机器上启动节点
-
respawn=“true | false” (可选)
如果节点退出,是否自动重启
示例:

-
respawn_delay=" N" (可选)
如果 respawn 为 true, 那么延迟 N 秒后启动节点
-
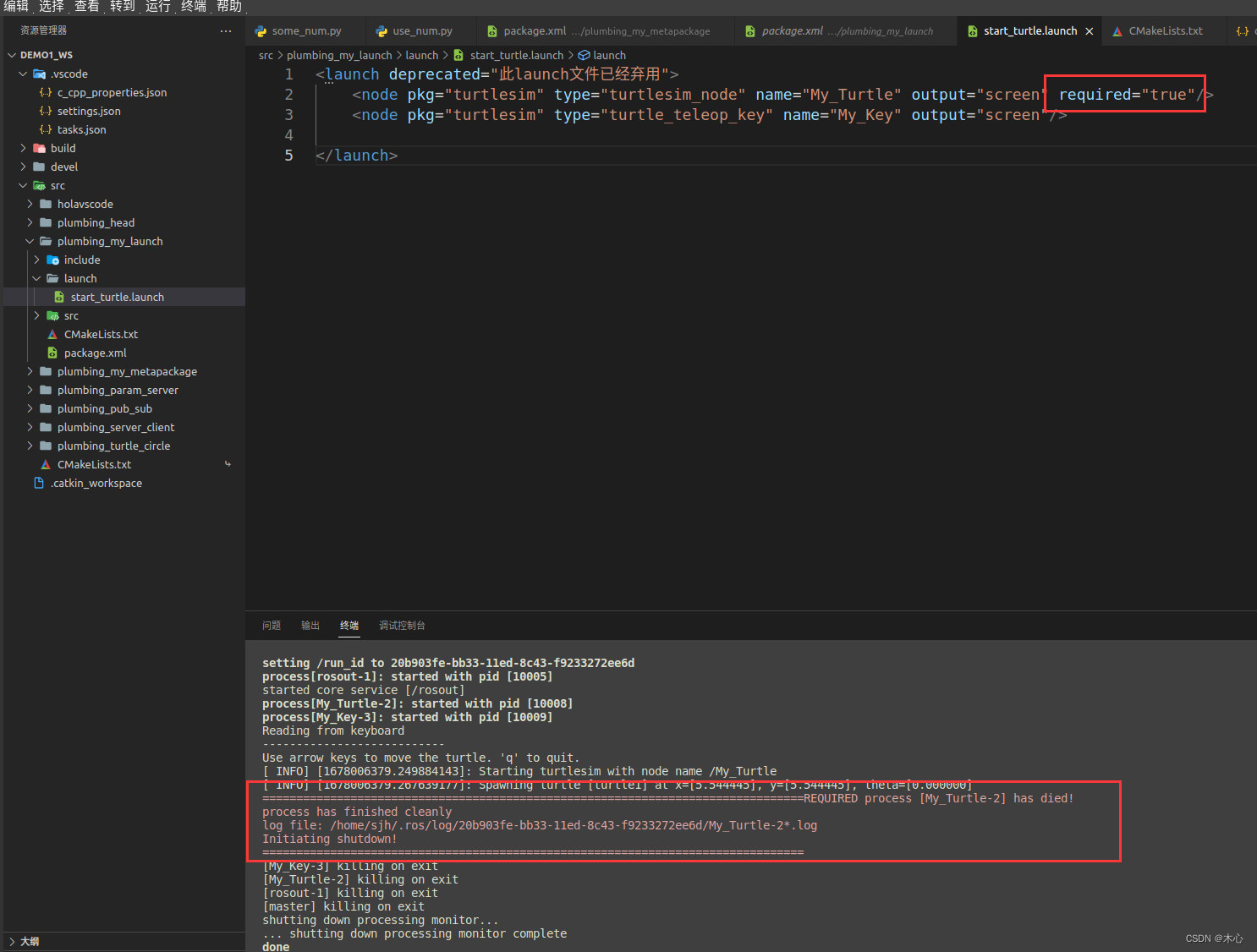
required=“true | false” (可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
示例:
-
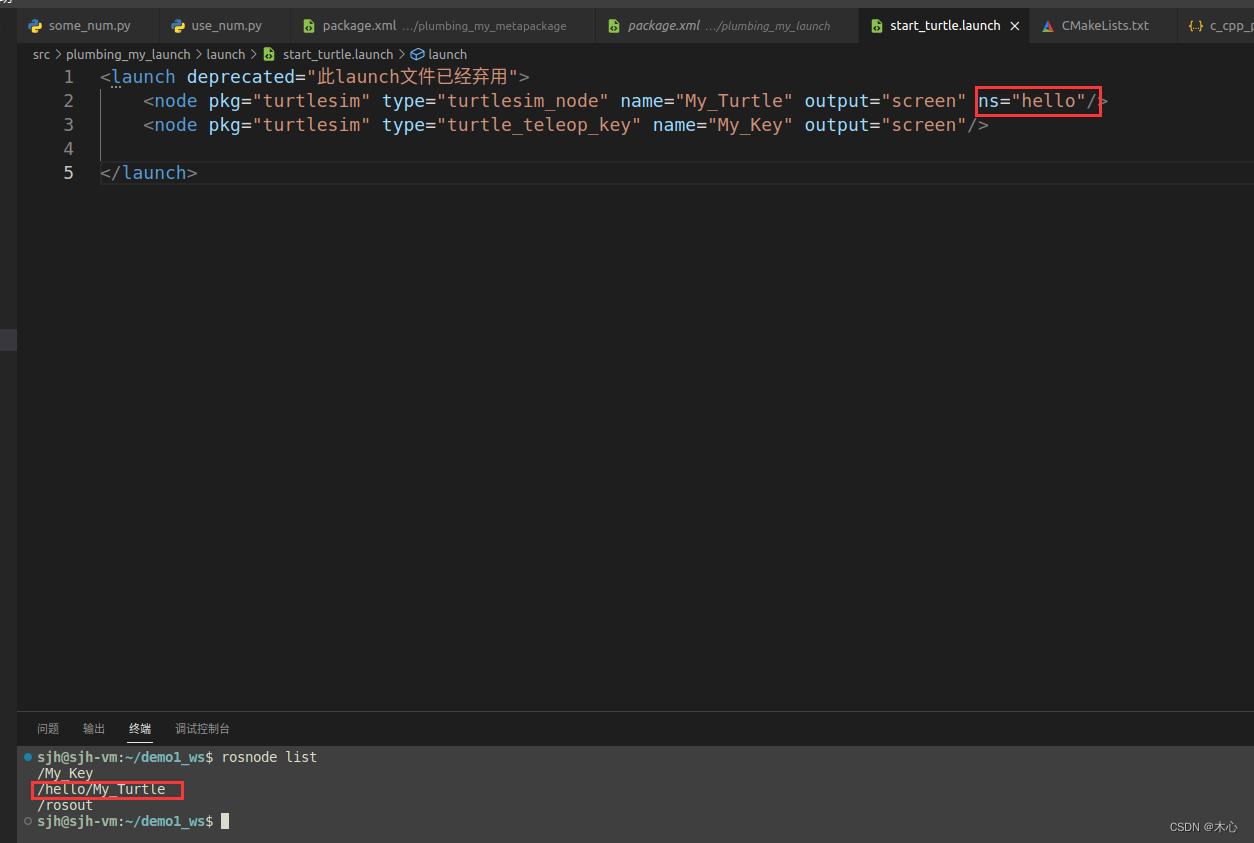
ns=“xxx” (可选)
在指定命名空间 xxx 中启动节点
示例:
-
clear_params=“true | false” (可选)
在启动前,删除节点的私有空间的所有参数
-
output=“log | screen” (可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
2、子级标签
- env 环境变量设置
- remap 重映射节点名称
- rosparam 参数设置
- param 参数设置
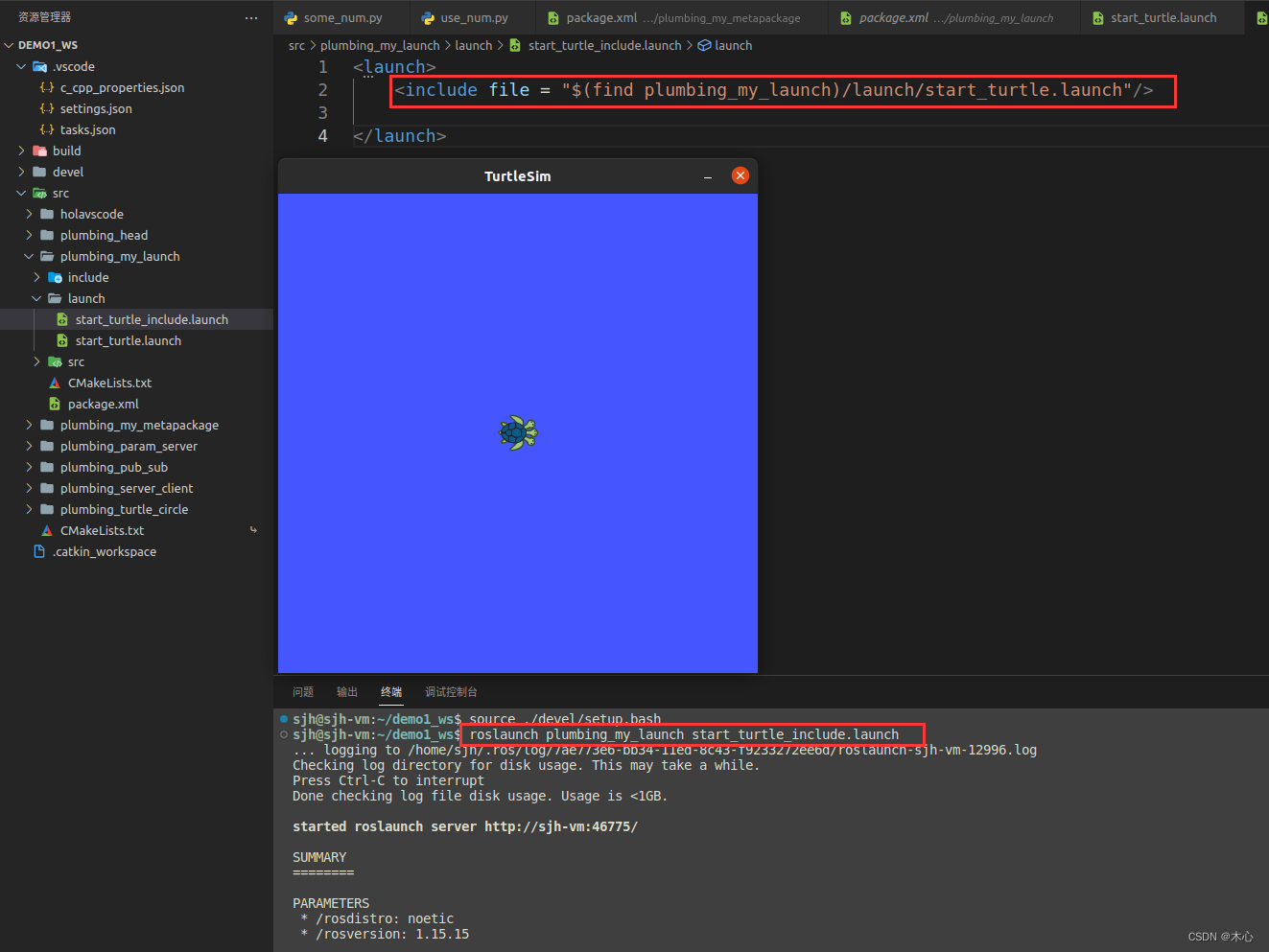
2.3 launch文件标签之include
include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
1、属性
-
file=“$(find 包名)/xxx/xxx.launch”
要包含的文件路径
-
ns=“xxx” (可选)
在指定命名空间导入文件
2、子级标签
- env 环境变量设置
- arg 将参数传递给被包含的文件
示例:
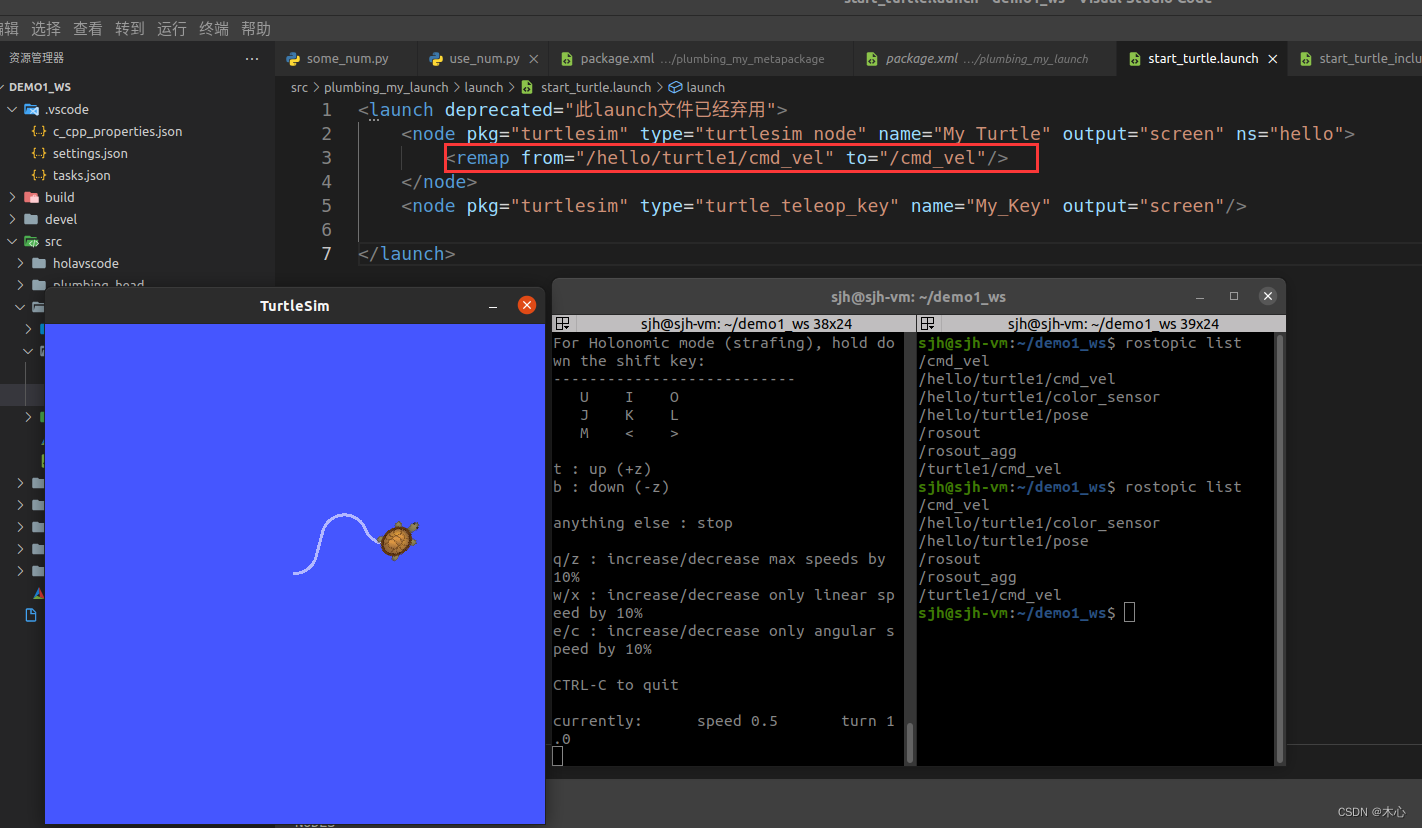
2.4 launch文件标签之remap
用于话题重命名
1、属性
-
from=“xxx”
原始话题名称
-
to=“yyy”
目标名称
2、子集标签
无
示例:
想使用python内置的键盘控制节点来控制乌龟的运动
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
会产生冲突,因为
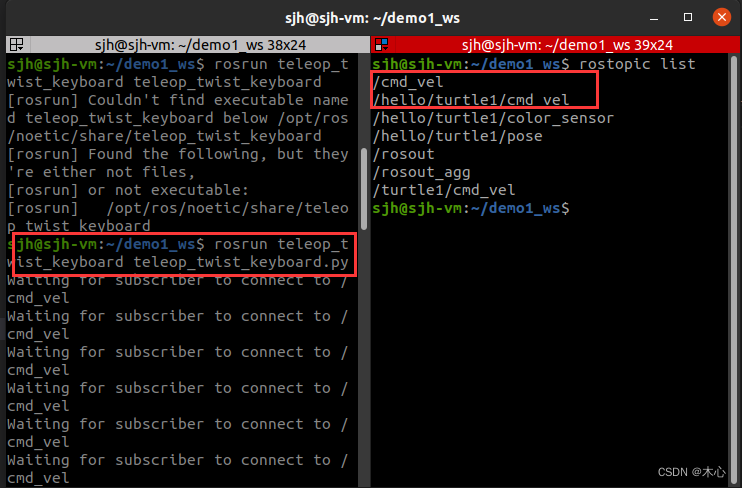
键盘控制输入的话题是/cmd_vel而乌龟控制输入所需要的话题是/hello/turtle1/cmd_vel,两者不同所以不能进行控制。
现在我们使用remap可以完成这一目的。
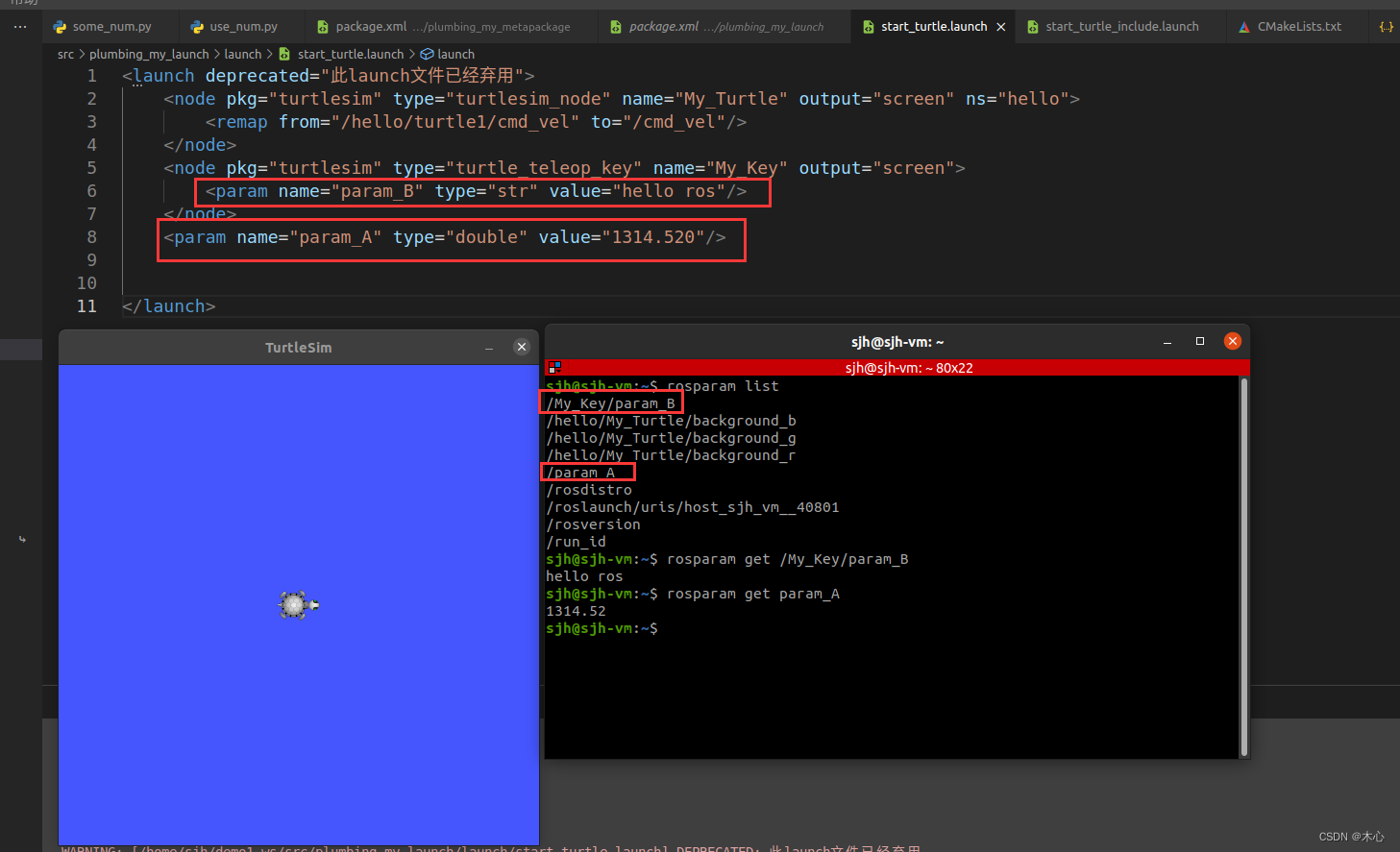
2.5 launch文件标签之param
<param>标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在<node>标签中时,相当于私有命名空间。
1、属性
-
name=“命名空间/参数名”
参数名称,可以包含命名空间
-
value=“xxx” (可选)
定义参数值,如果此处省略,必须指定外部文件作为参数源
-
type=“str | int | double | bool | yaml” (可选)
指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下:
- 如果包含 ‘.’ 的数字解析未浮点型,否则为整型
- “true” 和 “false” 是 bool 值(不区分大小写)
- 其他是字符串
2、子级标签
- 无
示例效果如下:
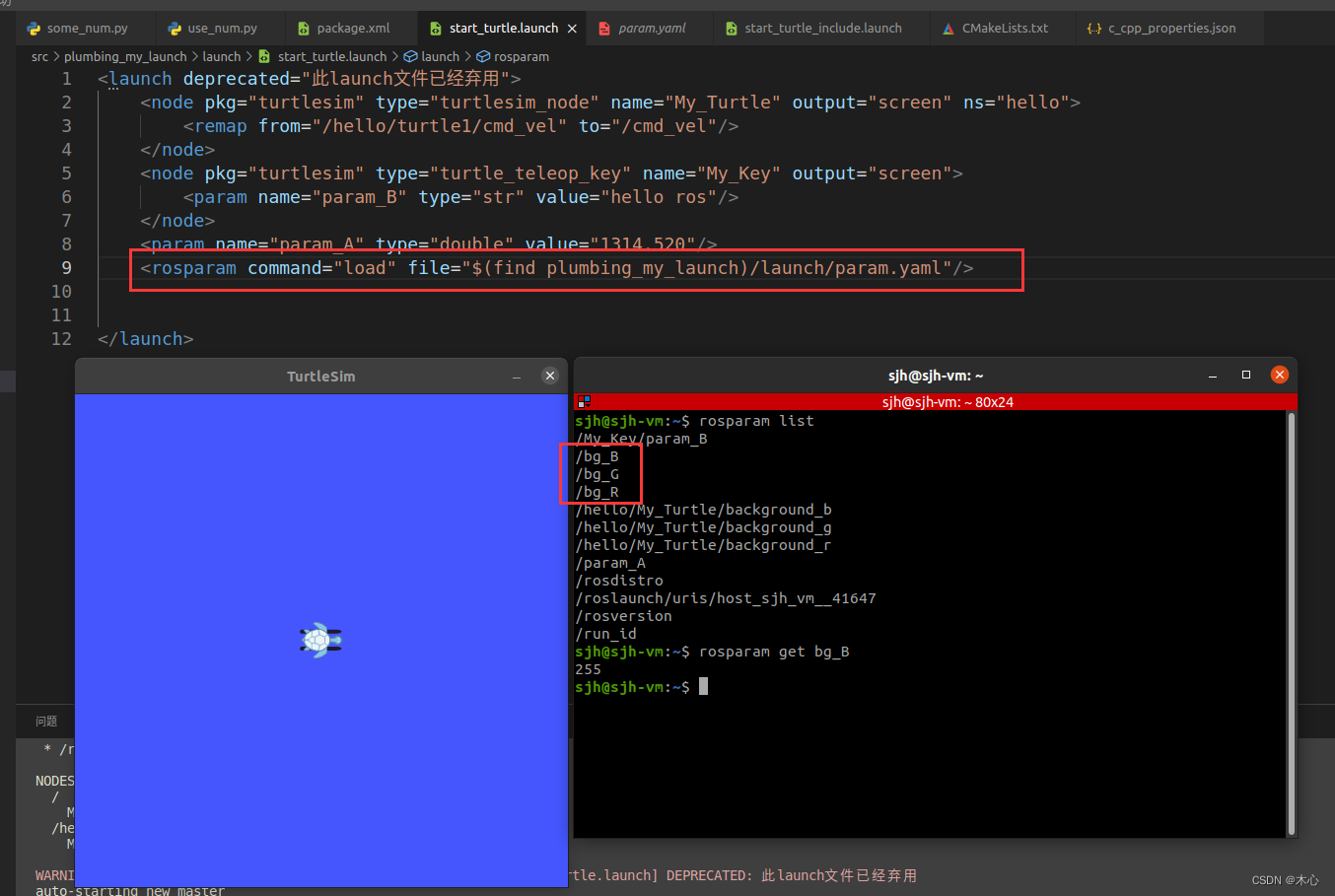
2.6 launch文件标签之rosparam
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
1、属性
-
command=“load | dump | delete” (可选,默认 load)
加载、导出或删除参数
-
file=“$(find xxxxx)/xxx/yyy…”
加载或导出到的 yaml 文件
-
param=“参数名称”
-
ns=“命名空间” (可选)
2、子级标签
- 无
一个示例:
首先yaml文件这样设置
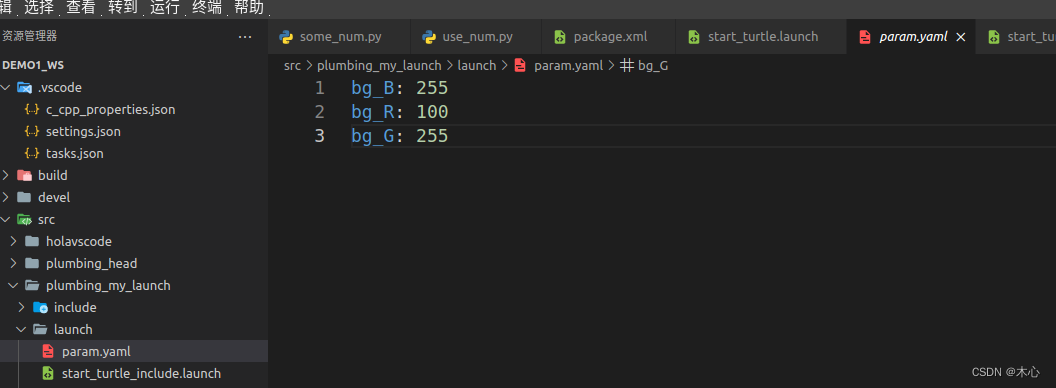
然后再导入yaml中的参数
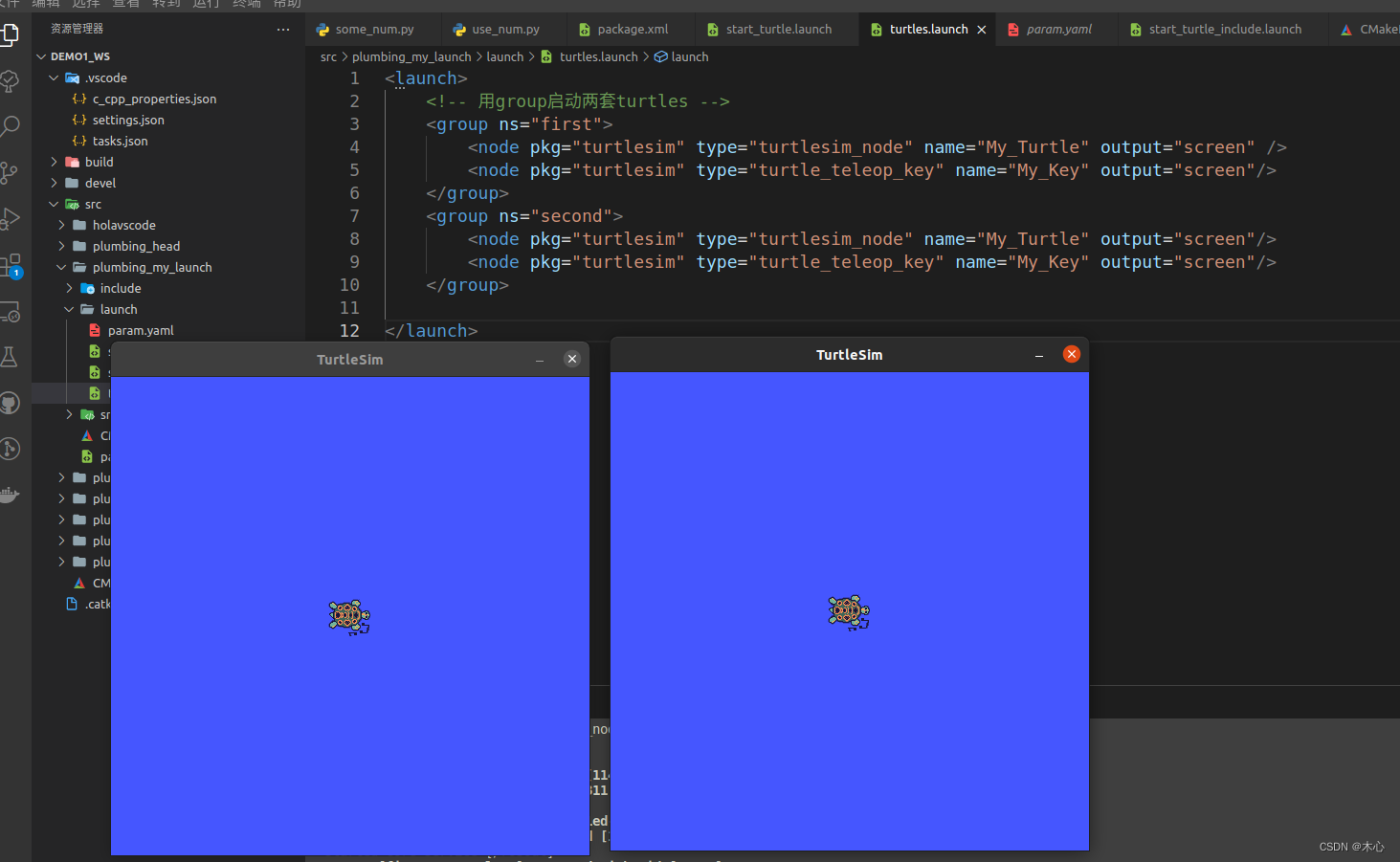
2.7 launch文件标签之group
<group>标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
1、属性
-
ns=“名称空间” (可选)
-
clear_params=“true | false” (可选)
启动前,是否删除组名称空间的所有参数(慎用…此功能危险)
2、子级标签
- 除了launch 标签外的其他标签
示例:
2.8 launch文件标签之arg
<arg>标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
1、属性
-
name=“参数名称”
-
default=“默认值” (可选)
-
value=“数值” (可选)
不可以与 default 并存
-
doc=“描述”
参数说明
2、子级标签
- 无
3、示例
-
launch文件传参语法实现,hello.lcaunch
<launch><arg name="xxx" /><param name="param" value="$(arg xxx)" /> </launch> Copy -
命令行调用launch传参
roslaunch hello.launch xxx:=值
Reference
http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/224-fu-wu-tong-xin-zi-ding-yi-srv-diao-yong-b-python.html
相关文章:
【ROS学习笔记11】ROS元功能包与launch文件的使用
【ROS学习笔记11】ROS元功能包与launch文件的使用 文章目录【ROS学习笔记11】ROS元功能包与launch文件的使用前言一、ROS元功能包二、ROS节点运行管理launch文件2.1 launch文件标签之launch2.2 launch文件标签之node2.3 launch文件标签之include2.4 launch文件标签之remap2.5 l…...

【python】
print函数 同时输出多行变量 print(a, b, sep\n) (23条消息) python3 中print函数参数详解,print(*values, sep , end\n, filesys.stdout, flushFalse)中参数介绍_sep,_phantom-dapeng的博客-CSDN博客 input() 输入浮点数,不能用int(input()) int()…...
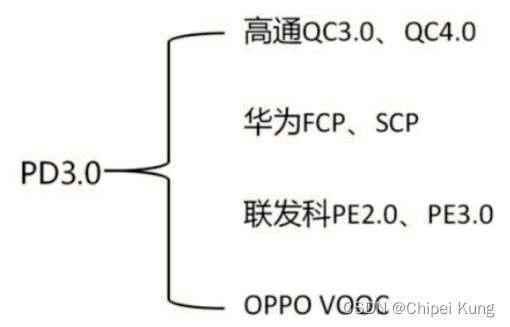
充电协议: 快充协议,如何选充电宝?
快充协议(存在两种:电压; 电流) 目前市面上的快充技术大多遵循2个技术方向: 以高通QC、联发科PEP、华为FCP为首的高压低电流快充技术; 另一种就是以OPPO的VOOC以及华为SCP为首的低电压大电流快充技术。 目前常见的快充标准还有三星AFC、联发…...
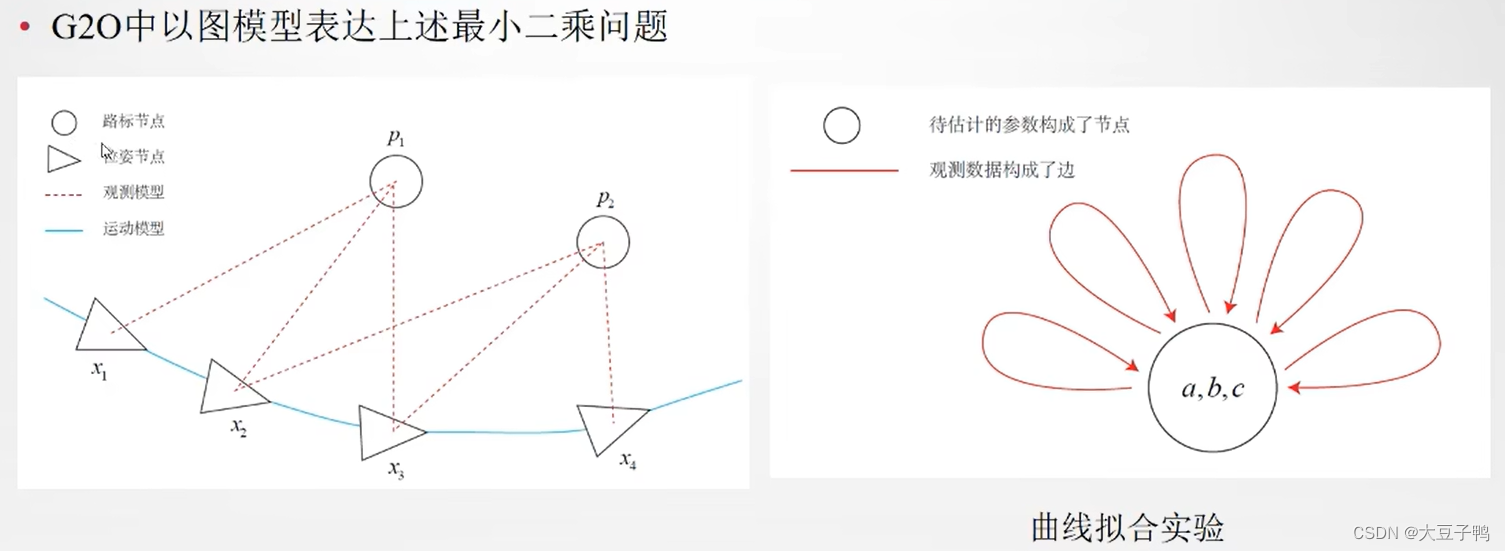
视觉SLAM十四讲ch6 非线性优化笔记
视觉SLAM十四讲ch6 非线性优化笔记本讲目标上讲回顾状态估计问题非线性最小二乘Gauss-Newton:高斯牛顿Levenburg-Marquadt:列文伯格-马夸尔特小结实践:CERES实践:G2O本讲目标 理解最小二乘法的含义和处理方式。 理解Gauss-Newton…...

Nikto工具使用指南
NiktoNikto是一款开源网站服务器扫描器,使用Perl开发,可以对服务器进行全面扫描,包括6400多个潜在危险的文件/cgi(通用网关接口(Common Gateway Interface)),废话不多说,直接上命令:基本测试&am…...
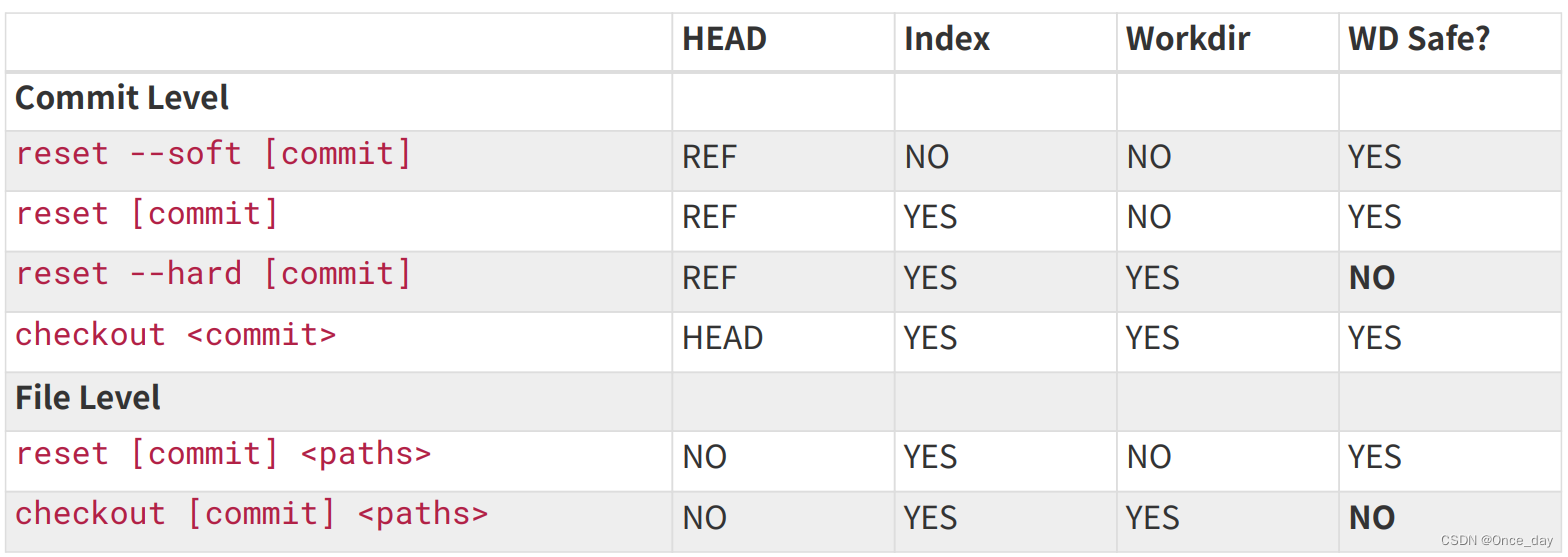
Git(4)之基本工具
Git基础之基本工具 Author:onceday date:2023年3月5日 满满长路有人对你微笑过嘛… windows安装可参考文章:git简易配置_onceday_CSDN博客 參考文档: 《progit2.pdf》,Progit2 Github。《git-book.pdf》 文章目录…...

好书推荐。
个人喜欢看传记,散文,历史等 二战名人传记,苏联列宁,朱可夫,斯大林等 英国首相丘吉尔,美国富兰克林,中国毛泽东等 创业:比尔盖,扎克伯格,苹果公司创始人乔…...

[Pytorch]DataSet和DataLoader逐句详解
将自己的数据集引入Pytorch是搭建属于自己的神经网络的重要一步,这里我设计了一个简单的实验,结合这个实验代码,我将逐句教会大家如何将数据引入DataLoader。 这里以目标检测为例,一个batch中包含图片文件、先验框的框体坐标、目标…...
【Kettle-佛系总结】
Kettle-佛系总结Kettle-佛系总结1.kettle介绍2.kettle安装3.kettle目录介绍4.kettle核心概念1.转换2.步骤3.跳(Hop)4.元数据5.数据类型6.并行7.作业5.kettle转换1.输入控件1.csv文件输入2.文本文件输入3.Excel输入4.XML输入5.JSON输入6.表输入2.输出控件…...

JavaSE网络编程
JavaSE网络编程一、基本概念二、常用类三、使用方法1、创建服务器端Socket2、创建客户端Socket3、创建URL对象JavaSE中的网络编程模块提供了一套完整的网络编程接口,可以方便地实现各种基于网络的应用程序。本文将介绍JavaSE中网络编程模块的基本知识、常用类以及使…...
9万字“联、管、用”三位一体雪亮工程整体建设方案
本资料来源公开网络,仅供个人学习,请勿商用。部分资料内容: 1、 总体设计方案 围绕《公共安全视频监控建设联网应用”十三五”规划方案》中的总体架构和一总两分结构要求的基础上,项目将以“加强社会公共安全管理,提高…...

springboot自动装配原理
引言 springboot的自动装配是其重要特性之一,在使用中我们只需在maven中引入需要的starter,然后相应的Bean便会自动注册到容器中。例如: <dependency><groupId>org.springframework.boot</groupId><artifactId>spr…...
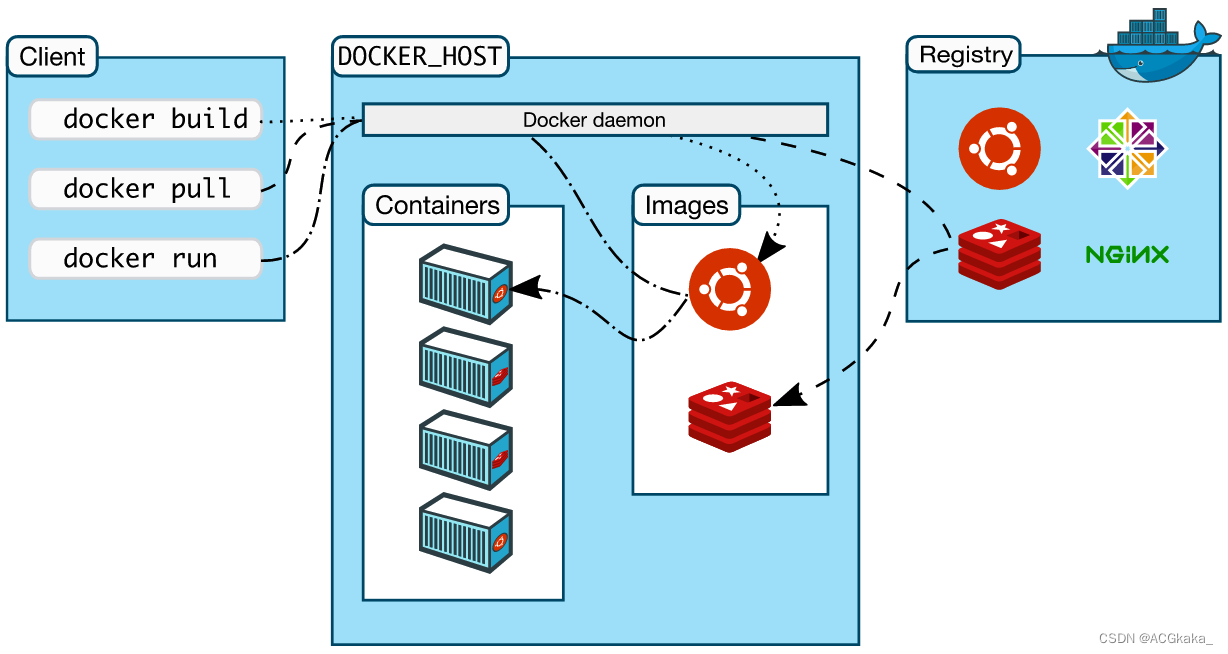
Docker学习(二十)什么是分层存储?
目录1.简介2.什么是 Union Mount?3.分层介绍1)lowerdir 层(镜像层)2)upperdir 层(容器层)3)merged 层4.工作原理1)读:2)写:3ÿ…...

Vue组件进阶(动态组件,组件缓存,组件插槽,具名插槽,作用域插槽)与自定义指令
Vue组件进阶与自定义指令一、Vue组件进阶1.1 动态组件1.2 组件缓存1.3 组件激活和非激活1.4 组件插槽1.5 具名插槽1.6 作用域插槽1.7 作用域插槽使用场景二、自定义指令2.1 自定义指令--注册2.2 自定义指令-传参一、Vue组件进阶 1.1 动态组件 多个组件使用同一个挂载点&#x…...

僵尸进程与孤儿进程
概念 在 Unix/Linux 系统中,正常情况下,子进程是通过父进程创建的,且两者的运行是相互独立的,父进程永远无法预测子进程到底什么时候结束。当一个进程调用 exit 命令结束自己的生命时,其实它并没有真正的被销毁&#…...
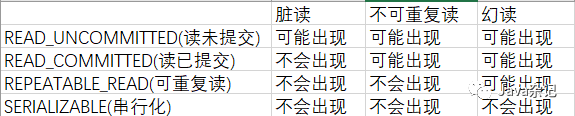
基于注解@Transactional事务基本用法
关于概念性的放在最下面,熟读几遍 在使用时候也没多关注,总是加个Transactional 初识下 一般查询 Transactional(propagation Propagation.SUPPORTS) 增删改 Transactional(propagation Propagation.REQUIRED) 当然不能这么马虎 Spring中关于事务的传播 一个个测试,事…...
Go项目(商品微服务-2)
文章目录简介handler商品分类轮播图品牌和品牌与分类oss前端直传库存服务数据不一致redis 分布式锁小结简介 开发商品微服务 API 层类似的,将 user-web 目拷贝一份,全局替换掉 user-web修改 config 去掉不用的配置更新本地和远程 nacos 配置文件 把 pro…...
无头盔PICO-unity开发日记1(抓取、传送)
目录 可传送的地面 锚点传送 修改射线颜色(可交互/不可交互) 球、抓手组件 ||刚体(重力)组件 可传送的地面 1.地面添加组件 2.XR交互管理器添加传送提供者 3.地面设置传送提供者 4.XR交互管理器添加locomotion system 5.拖拽 完…...

Material3设计指南笔记
Material3设计指南笔记Table of Contents1. 颜色color1.1. 颜色分类1.2. 强调色accent color1.3. 中性色neutral color1.4. 辅助色additional color1.5. 调色盘tonal palettes1.6. 颜色规范2. z轴高度 elevation3. 图标 icon4. 动画 motion5. 形状 shape6. 字体1. 颜色color1.1…...

JavaWeb--会话技术
会话技术1 会话跟踪技术的概述2 Cookie2.1 Cookie的基本使用2.2 Cookie的原理分析2.3 Cookie的使用细节2.3.1 Cookie的存活时间2.3.2 Cookie存储中文3 Session3.1 Session的基本使用3.2 Session的原理分析3.3 Session的使用细节3.3.1 Session钝化与活化3.3.2 Session销毁目标 理…...

谷歌 Gemma 4 部署指南
谷歌 Gemma 4 部署指南 Gemma 4 是 Google DeepMind 于 2026 年 4 月 2 日发布的最新开放权重模型系列,采用 Apache 2.0 许可协议,支持商业用途。该系列模型提供 E2B、E4B、26B A4B(MoE 架构)及 31B(密集架构)四种变体,适用于从移动设备、边缘计算到服务器和工作站的广…...

Excel VBA 技巧:让工作表中的形状宏自适应
在日常工作中,Excel 不仅仅是数据处理的工具,更是我们自动化办公的利器。今天我们要探讨的是如何让Excel工作表中的形状宏能够自适应地工作,即使在复制工作表到新的工作簿时也能保持其功能性。 问题背景 假设我们有一个工作簿BOOK1,其中包含一个名为TEST的工作表和一个名…...

RemotelyAnywhere远程桌面无法使用鼠标操作
问题描述RemotelyAnywhere远程桌面无法使用鼠标操作,点击一下就刷新页面,无法输入密码解决方案1、使用360浏览器打开页面2、使用兼容模式3、启用系统的TLS 1.2支持 (解决核心矛盾)这是最关键的一步,用来强制让电脑支持相对较新的TLS 1.2协议&…...

Candleduino:面向MAB驱动器的跨平台CAN控制库
1. Candleduino库概述:面向MAB Robotics驱动器的跨平台CAN控制解决方案Candleduino是一个专为嵌入式平台设计的Arduino兼容C库,核心目标是实现对MAB Robotics公司MD系列伺服驱动器(Motor Drive)与PDS系列电源分配系统(…...
飞速发展)
**雾计算中的边缘智能:基于Python的轻量级任务调度系统设计与实现**在物联网(IoT)飞速发展
雾计算中的边缘智能:基于Python的轻量级任务调度系统设计与实现 在物联网(IoT)飞速发展的今天,传统云计算模式已难以满足低延迟、高带宽和实时响应的需求。**雾计算(Fog Computing)**作为云与终端设备之间的…...

LIS302DL加速度计I²C驱动库LS302i2c详解
1. LS302i2c 库概述:面向嵌入式系统的 LIS302DL IC 加速度计驱动实现LS302i2c 是一个专为 STM32 及兼容 Cortex-M 微控制器设计的轻量级、可移植 IC 接口加速度计驱动库,其核心目标是为 STMicroelectronics 的 LIS302DL 三轴数字加速度传感器提供稳定、低…...

OpenAI收购科技脱口秀TBPN,力图塑造AI叙事话语权
OpenAI正通过收购备受硅谷内部人士关注的科技脱口秀TBPN进军媒体行业,该节目主持人周三宣布了这一消息。联合主持人约翰库根和乔迪海斯每个工作日从洛杉矶直播TBPN节目三小时,邀请的嘉宾包括创业者、风险投资家和科技界重要人物。此次交易的财务条款未予…...

OpenClaw模型微调:优化千问3.5-35B-A3B-FP8在特定任务的表现
OpenClaw模型微调:优化千问3.5-35B-A3B-FP8在特定任务的表现 1. 为什么需要微调千问模型? 当我第一次尝试用OpenClaw自动化处理财务报告时,发现千问3.5-35B-A3B-FP8虽然能理解基本指令,但在处理表格数据提取和金额计算时频繁出错…...

STM32大棚花卉物联网护养系统设计与实现
1. 项目概述这个大棚花卉护养系统是我去年为一个花卉种植基地设计的物联网解决方案。当时客户反映传统人工管理方式效率低下,经常出现浇水不及时、温度控制不精准等问题。经过三个月的开发和调试,这套系统成功将花卉产量提升了30%,同时减少了…...

【数据结构】二叉树非递归前中后序遍历详解
二叉树的遍历是二叉树操作的基础核心,递归遍历实现简单但存在栈溢出风险,在处理深度较大的二叉树时,非递归遍历凭借手动维护栈的方式更具稳定性。本文将详细讲解二叉树前序、中序、后序的非递归遍历实现思路,结合 C 语言代码完整实…...