LeetCode 2120.执行所有后缀指令
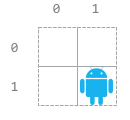
现有一个 n x n 大小的网格,左上角单元格坐标 (0, 0) ,右下角单元格坐标 (n - 1, n - 1) 。给你整数 n 和一个整数数组 startPos ,其中 startPos = [startrow, startcol] 表示机器人最开始在坐标为 (startrow, startcol) 的单元格上。
另给你一个长度为 m 、下标从 0 开始的字符串 s ,其中 s[i] 是对机器人的第 i 条指令:‘L’(向左移动),‘R’(向右移动),‘U’(向上移动)和 ‘D’(向下移动)。
机器人可以从 s 中的任一第 i 条指令开始执行。它将会逐条执行指令直到 s 的末尾,但在满足下述条件之一时,机器人将会停止:
下一条指令将会导致机器人移动到网格外。
没有指令可以执行。
返回一个长度为 m 的数组 answer ,其中 answer[i] 是机器人从第 i 条指令 开始 ,可以执行的 指令数目 。
示例 1:

输入:n = 3, startPos = [0,1], s = “RRDDLU”
输出:[1,5,4,3,1,0]
解释:机器人从 startPos 出发,并从第 i 条指令开始执行:
- 0: “RRDDLU” 在移动到网格外之前,只能执行一条 “R” 指令。
- 1: “RDDLU” 可以执行全部五条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 2: “DDLU” 可以执行全部四条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 3: “DLU” 可以执行全部三条指令,机器人仍在网格内,最终到达 (0, 0) 。
- 4: “LU” 在移动到网格外之前,只能执行一条 “L” 指令。
- 5: “U” 如果向上移动,将会移动到网格外。
示例 2:
输入:n = 2, startPos = [1,1], s = “LURD”
输出:[4,1,0,0]
解释:
- 0: “LURD”
- 1: “URD”
- 2: “RD”
- 3: “D”
示例 3:

输入:n = 1, startPos = [0,0], s = “LRUD”
输出:[0,0,0,0]
解释:无论机器人从哪条指令开始执行,都会移动到网格外。
提示:
m == s.length
1 <= n, m <= 500
startPos.length == 2
0 <= startrow, startcol < n
s 由 ‘L’、‘R’、‘U’ 和 ‘D’ 组成
法一:直接模拟:
class Solution {
public:vector<int> executeInstructions(int n, vector<int>& startPos, string s) {vector<int> ans;for (int i = 0; i < s.size(); ++i){vector<int> curPos = startPos;int curAns = 0;for (int j = i; j < s.size(); ++j){if (s[j] == 'L'){--curPos[1];}else if (s[j] == 'R'){++curPos[1];}else if (s[j] == 'U'){--curPos[0];}else if (s[j] == 'D'){++curPos[0];}if (curPos[0] < 0 || curPos[0] > n - 1 || curPos[1] < 0 || curPos[1] > n - 1){break;}++curAns;}ans.push_back(curAns);}return ans;}
};
如果s的长度为m,则此算法时间复杂度为O(m 2 ^{2} 2),空间复杂度为O(1)。
法二:我们先无视网格边界,计算出执行完所有指令后的坐标,然后从后往前遍历指令,每遍历到一个指令,我们先保存下来这个指令后面还有几个指令(即倒序遍历到了当前第几个),然后undo这条指令,然后再计算当前位置与起始位置的偏移,这个偏移可以看做网格的偏移而非机器人的偏移,计算出网格的偏移后,我们可以计算出新的出界条件,开始时是x或y为-1到n时出界,现在出界条件要加上偏移量。然后,核心思想是,我们是知道当前位置距离结束还有几个指令的,我们也知道边界条件下到指令结束还有几个指令(前面每遍历到一个位置保存的),因此两者相减就是还可执行的指令数:
class Solution {
public:vector<int> executeInstructions(int n, vector<int>& startPos, string s) {int x = startPos[1];int y = startPos[0];for (char c : s){if (c == 'U'){--y;}else if (c == 'D'){++y;}else if (c == 'L'){--x;}else if (c == 'R'){++x;}}vector<int> ans(s.size());map<int, int> dx;map<int, int> dy;for (int i = s.size() - 1; i >= 0; --i){// 记录到当前位置到命令串终止还有几个指令dx[x] = s.size() - i;dy[y] = s.size() - i;// undo指令,为了下步遍历做准备if (s[i] == 'U'){++y;}else if (s[i] == 'D'){--y;}else if (s[i] == 'L'){++x;}else if (s[i] == 'R'){--x;}// 获取当前位置到起始位置的偏移// 我们接下来要把整个网格移动这个偏移量// 我们要先undo指令再计算偏移量,因为这才是执行当前遍历到的指令前的位置// 举例来说,第一次遍历时玩家位置在执行完最后一条指令后的位置int xDiff = x - startPos[1];int yDiff = y - startPos[0];// 原本是到-1或n时出界,由于网格也偏移了,加上偏移量,得到新的出界条件// 这一步是获取在网格偏移后的界限上,到终止还有几个指令// 之所以要取max,举例来解释,如果2×2的格子先向上移动100次,再向下移动200次// 那么我们应该取首次出界时后面还有几个指令int afterEndInstructionNum = max({dx[-1 + xDiff], dx[n + xDiff], dy[-1 + yDiff], dy[n + yDiff]});ans[i] = s.size() - i - afterEndInstructionNum;}return ans;}
};
如果s的长度为m,则此算法时间复杂度为O(m),空间复杂度为O(m)。
相关文章:
LeetCode 2120.执行所有后缀指令
现有一个 n x n 大小的网格,左上角单元格坐标 (0, 0) ,右下角单元格坐标 (n - 1, n - 1) 。给你整数 n 和一个整数数组 startPos ,其中 startPos [startrow, startcol] 表示机器人最开始在坐标为 (startrow, startcol) 的单元格上。 另给你…...
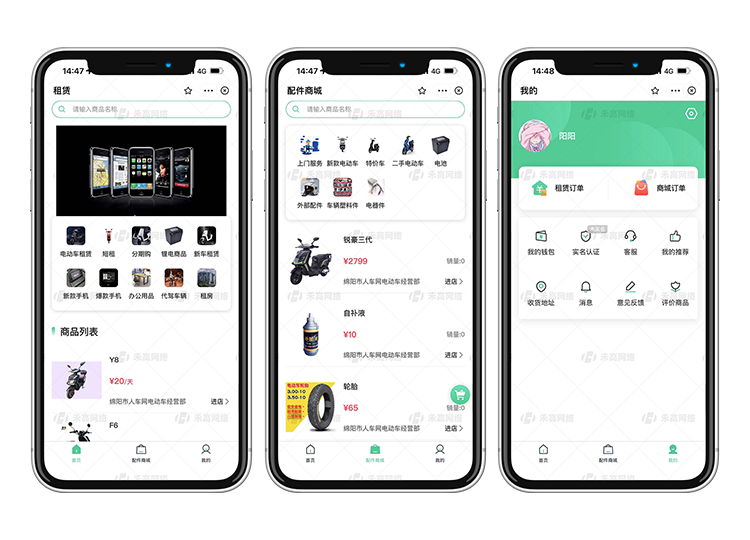
租赁小程序|租赁系统|租赁软件开发带来高效运营
随着社会的不断发展和科技的不断进步,越来越多的企业开始关注设备租赁业务。设备租赁作为一种短期使用设备的方式,为企业提供了灵活和成本节约的优势。针对设备租赁业务的管理和提升企业竞争力的需求,很多企业选择定制开发设备租赁系统。本文…...
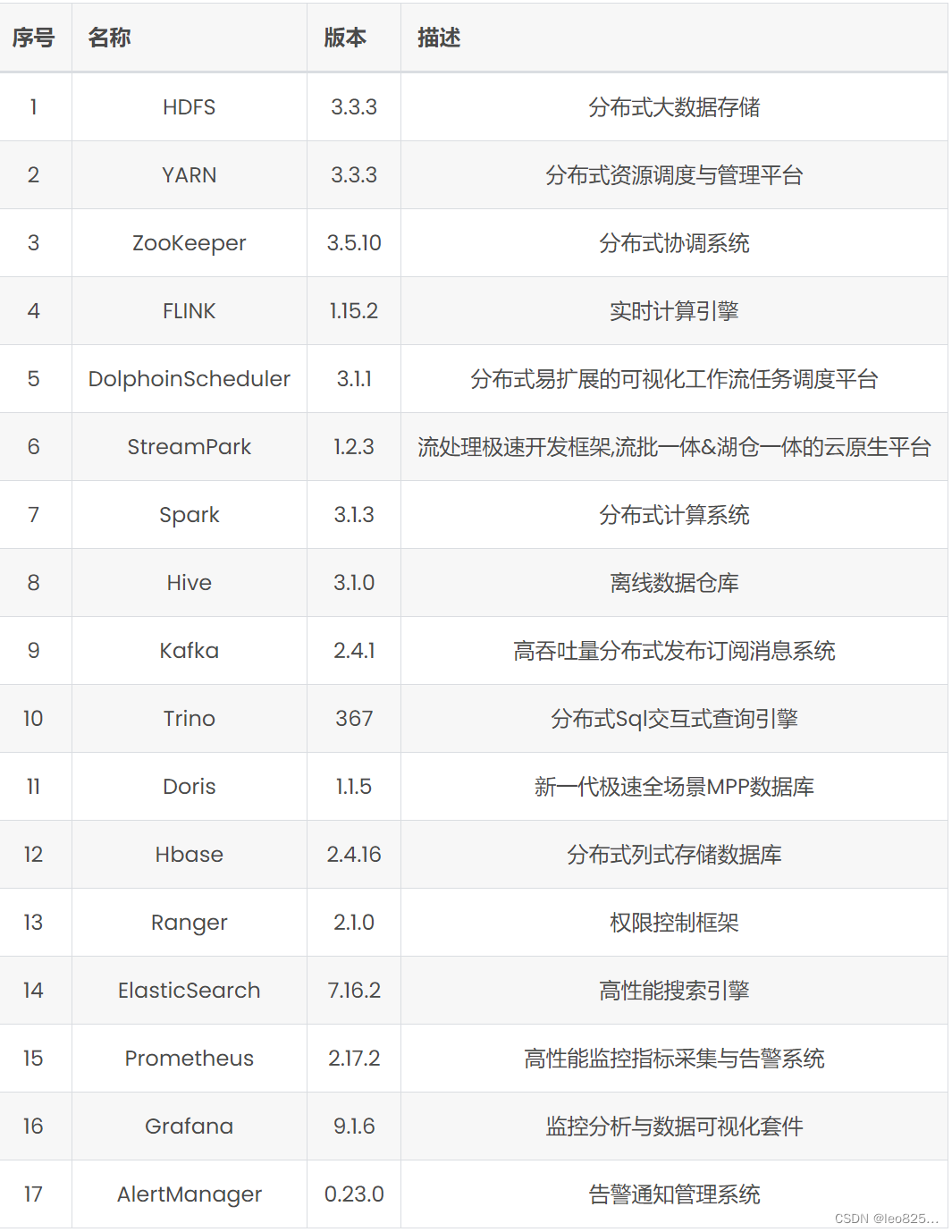
大数据集群管理软件 CDH、Ambari、DataSophon 对比
文章目录 引言工具介绍CDHAmbariDataSophon 对比分析 引言 大数据集群管理方式分为手工方式和工具方式,手工方式一般指的是手动维护平台各个组件,工具方式是靠大数据集群管理软件对集群进行管理维护。本文针对于常见的方法和工具进行比较,帮助…...
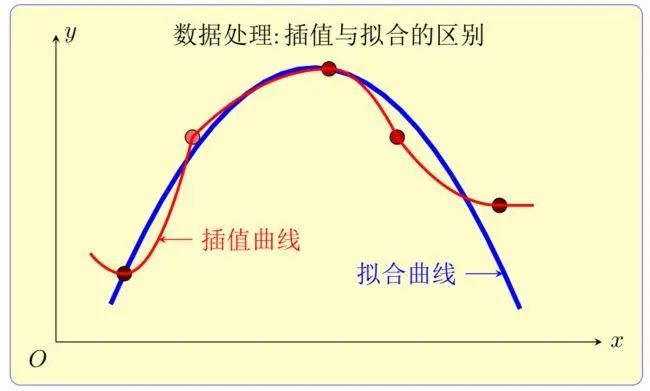
插值、逼近、拟合、光顺
插值 插值(Interpolation)是数学和计算科学中的一个重要概念,它指的是通过已知的一系列数据点,构造一个函数或曲线,并据此估计未知数据点的值。这个过程通常发生在已知数据点之间,用于预测或估算在这些已知…...

Java单元测试 - mock静态方法
文章目录 1. mock 静态方法2. 升级 maven 依赖3. 示例 1. mock 静态方法 mockito 在 3.4.0 版本之后,开始支持 mock static method。 2. 升级 maven 依赖 <dependency><groupId>org.mockito</groupId><artifactId>mockito-core</artif…...

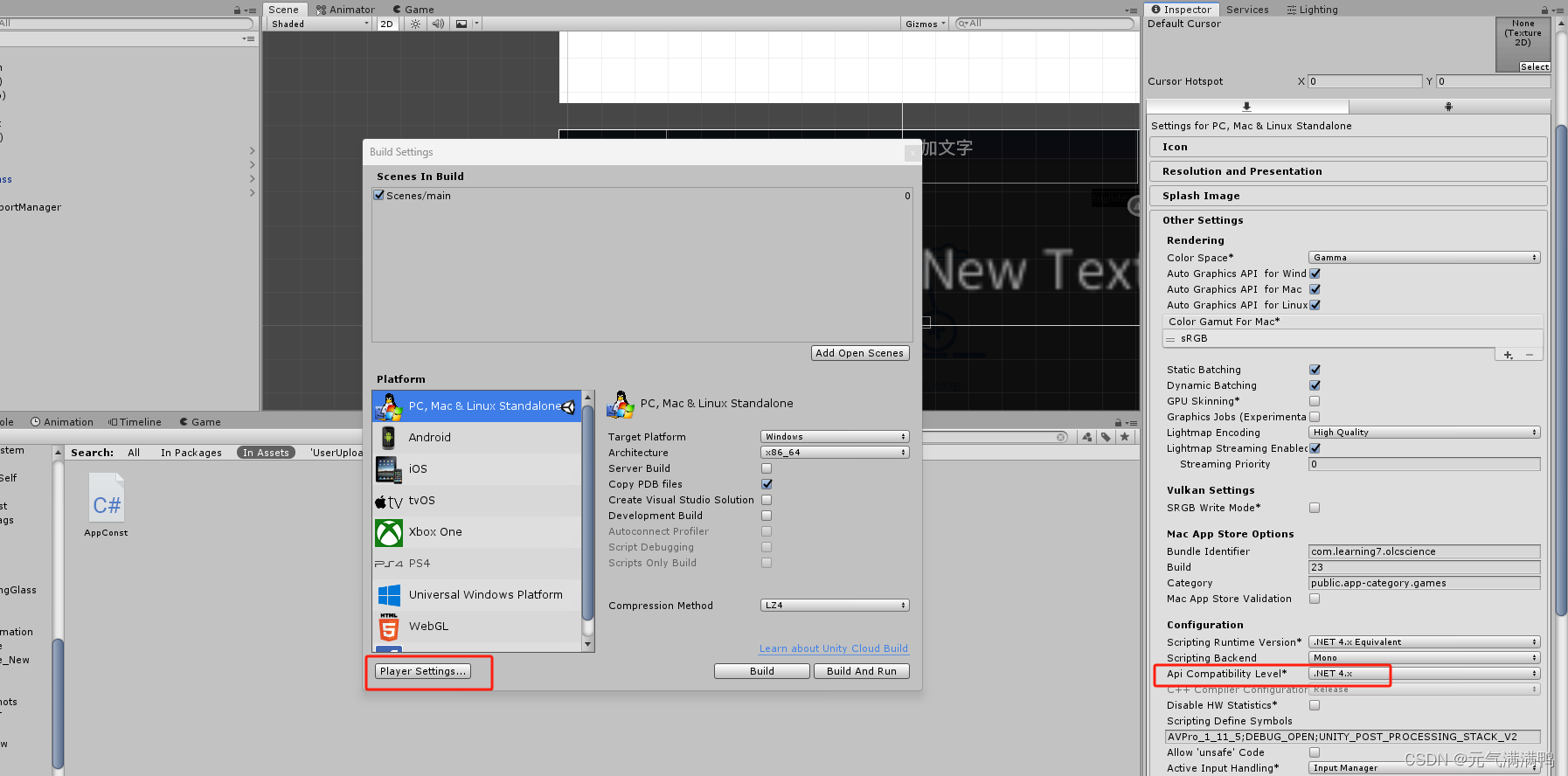
Unity使用PlayableAPI 动态播放动画
1.初始化animator,创建Playable图,创建动画Playable private void InitAnimator(GameObject headGo) {if (headGo){_headAnimator headGo.GetComponent<Animator>();if (_headAnimator){_headAnimator.cullingMode AnimatorCullingMode.AlwaysA…...
unity使用Registry类将指定内容写入注册表
遇到一个新需求,在exe执行初期把指定内容写入注册表,Playerprefs固然可以写入,但是小白不知道怎么利用Playerprefs写入DWORD类型的数据,因此使用了Registry类 一. 对注册表中键的访问 注册表中共可分为五类 一般在操作时&#…...

Python进阶学习:Pandas--将一种的数据类型转换为另一种类型(astype())
Python进阶学习:Pandas–将一种的数据类型转换为另一种类型(astype()) 🌈 个人主页:高斯小哥 🔥 高质量专栏:Matplotlib之旅:零基础精通数据可视化、Python基础【高质量合集】、PyTorch零基础入门教程&…...

OpenCV开发笔记(七十五):相机标定矫正中使用remap重映射进行畸变矫正
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://blog.csdn.net/qq21497936/article/details/136293833 各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究 红胖子(红模仿…...
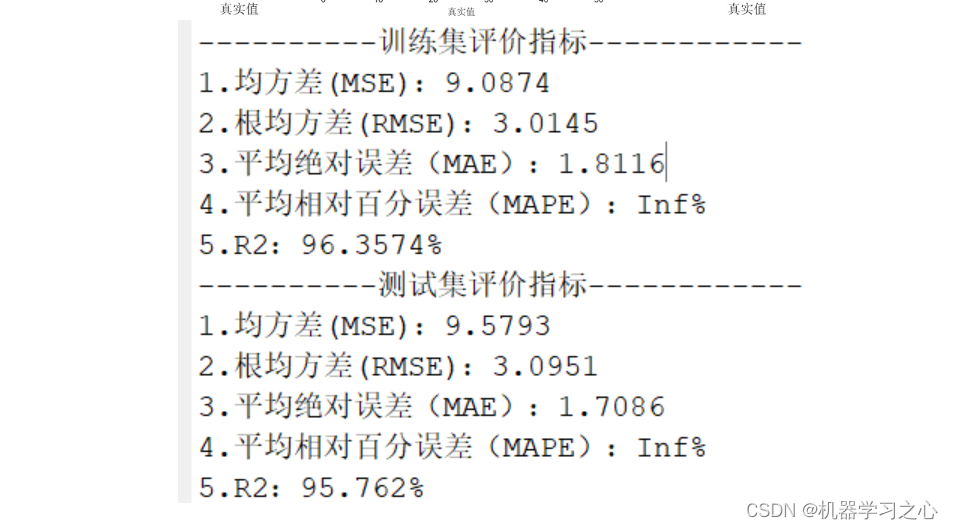
光伏预测 | Matlab基于CNN-SE-Attention-ITCN的多特征变量光伏预测
光伏预测 | Matlab基于CNN-SE-Attention-ITCN的多特征变量光伏预测 目录 光伏预测 | Matlab基于CNN-SE-Attention-ITCN的多特征变量光伏预测预测效果基本描述模型简介程序设计参考资料 预测效果 基本描述 Matlab基于CNN-SE-Attention-ITCN的多特征变量光伏预测 运行环境: Matla…...
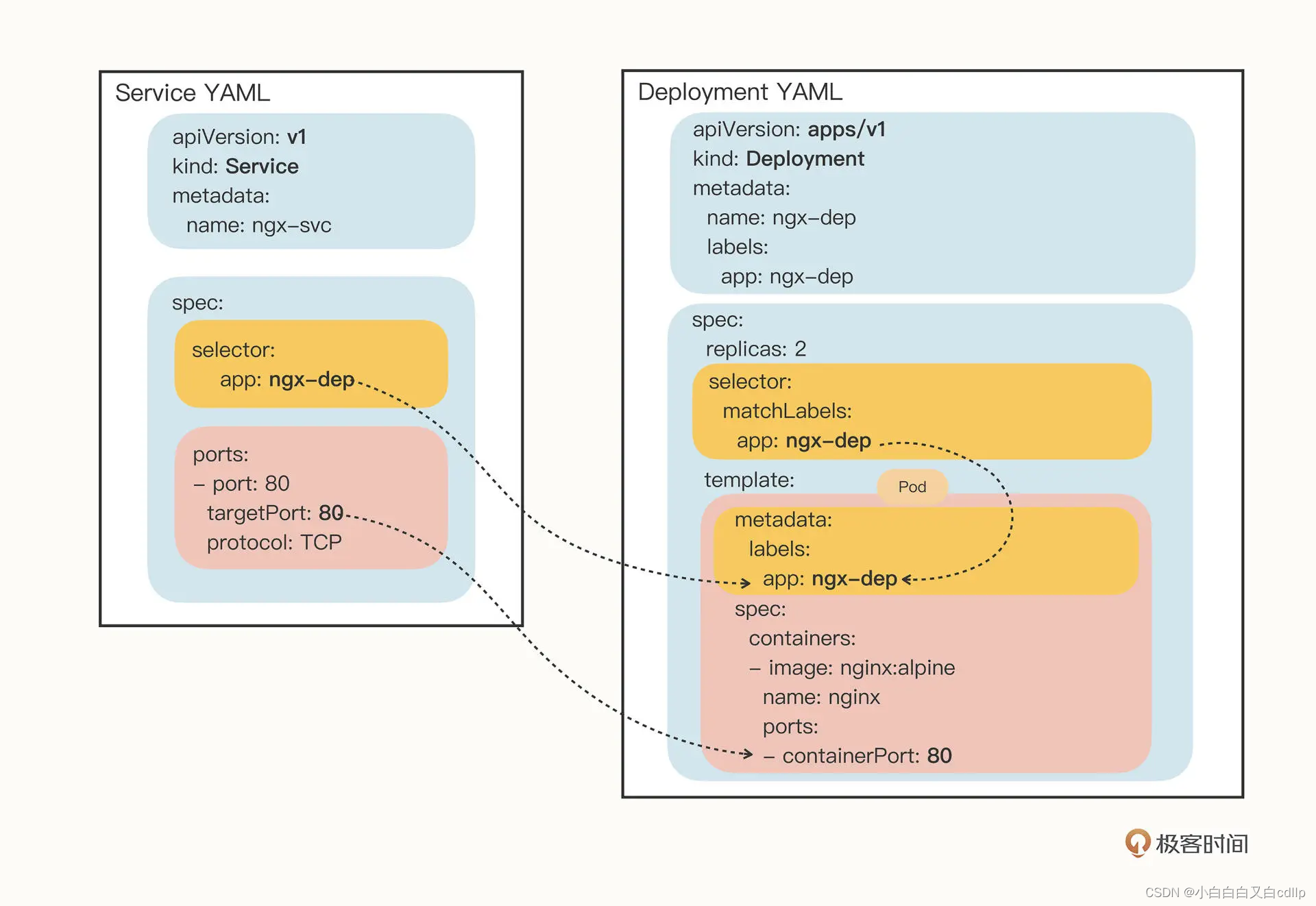
k8s学习笔记-基础概念
(作者:陈玓玏) deployment特别的地方在于replica和selector,docker根据镜像起容器,pod控制容器,job、cronjob、deployment控制pod,job做离线任务,pod大多一次性的,cronj…...
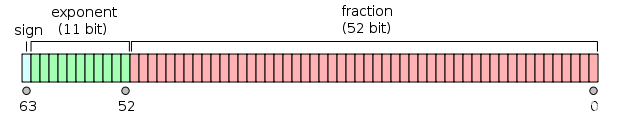
C语言 变量
变量其实只不过是程序可操作的存储区的名称。C 中每个变量都有特定的类型,类型决定了变量存储的大小和布局,该范围内的值都可以存储在内存中,运算符可应用于变量上。 变量的名称可以由字母、数字和下划线字符组成。它必须以字母或下划线开头…...

2024年2月16日优雅草蜻蜓API大数据服务中心v1.1.1大更新-UI全新大改版采用最新设计ui·增加心率计算器·退休储蓄计算·贷款还款计算器等数接口
2024年2月16日优雅草蜻蜓API大数据服务中心v1.1.1大更新-UI全新大改版采用最新设计ui增加心率计算器退休储蓄计算贷款还款计算器等数接口 更新日志 前言:本次更新中途跨越了很多个版本,其次本次ui大改版-同步实时发布教程《带9.7k预算的实战项目layuiph…...
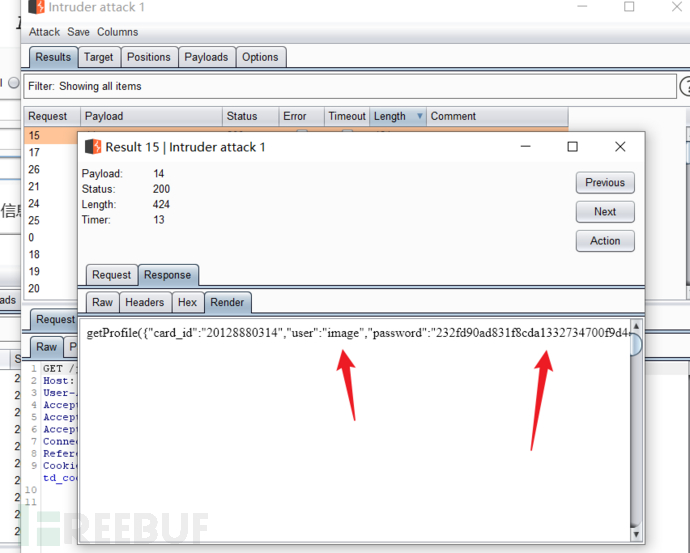
WEB漏洞 逻辑越权之支付数据篡改安全
水平越权 概述:攻击者尝试访问与他拥有相同权限的用户的资源 测试方法:能否通过A用户操作影响到B用户 案例:pikachu-本地水平垂直越权演示-漏洞成因 1)可以看到kobe很多的敏感信息 2)burp抓包,更改user…...

45、WEB攻防——通用漏洞PHP反序列化POP链构造魔术方法原生类
文章目录 序列化:将java、php等代码中的对象转化为数组或字符串等格式。代表函数serialize(),将一个对象转换成一个字符;反序列化:将数组或字符串等格式还成对象。代表函数unserialize(),将字符串还原成一个对象。 P…...

雾锁王国服务器怎么建?雾锁王国服务器搭建方法
雾锁王国Enshrouded服务器搭建怎么搭建?非常简单,阿里云计算巢雾锁王国程序,可以一键搭建雾锁王国多人联机服务器,腾讯云是基于雾锁王国镜像系统,阿里云服务网aliyunfuwuqi.com汇总雾锁王国服务器搭建,超简…...

设计模式篇---观察者模式
文章目录 概念结构实例总结 概念 观察者模式:定义对象之间的一种一对多的依赖关系,使得每当一个对象状态发生改变时,其他相关依赖对象都得到通知并被自动更新。 观察者模式是使用频率较高的一个模式,它建立了对象与对象之间的依赖…...

Docker常用命令Top20
Docker常用命令Top20 Docker是一种容器化平台,通过使用Docker,开发人员可以轻松地打包、交付和运行应用程序。以下是Docker中最常用的20个命令: docker run: 运行一个容器。 docker run <image_name>docker ps:…...

Redis的发布订阅机制及其使用场景
Redis的发布订阅(Pub/Sub)机制是一种消息通信模式,其中发送者(发布者)将消息发送到特定的频道,而订阅者则订阅其中一个或多个频道,以接收感兴趣的消息。这种模式可以用于构建实时通信系统、消息…...

计算机网络的基础知识
网络的性能指标:网络速率,bpsbit/s; 时延包括四个组成部分:发送时延、传播时延、排队时延、处理时延; 网络各个层次结构设计的基本三原则:各个层次之间是相互独立的,每一个层之间有足够的灵活…...

从多模态到模型之争:Java开发者的AI认知升级与转型指南
写在前面“多模态是什么?ChatGPT和DeepSeek到底有什么区别?在现在AI浪潮的冲击下,我作为一个Java后端开发者,到底要不要学AI?”这是很多Java开发者正在面对的困惑。AI领域日新月异,概念层出不穷,…...

ESP32-WROVER-E/IE模组硬件选型与外围电路设计实战
1. ESP32-WROVER-E与ESP32-WROVER-IE模组选型指南 第一次接触ESP32-WROVER系列模组时,很多人会被型号后缀搞晕。其实区分E和IE版本只需要记住一个关键点:字母"I"代表外部天线接口。ESP32-WROVER-IE模组预留了IPEX天线座,而ESP32-WR…...
)
在线考试系统国产化适配|信创考试系统全栈落地与实战方案(管鲍 V8.0 国产化版)
一、前言随着信创产业全面推进,党政机关、国企、金融、电力、教育等行业对自主可控、安全合规、稳定高效的在线考试系统需求持续升级。传统考试系统依赖国外操作系统、数据库与中间件,在兼容适配、数据安全、政策合规层面存在明显风险。本文以管鲍考试学…...

WinUtil:5步掌握Windows系统优化与软件管理的终极指南
WinUtil:5步掌握Windows系统优化与软件管理的终极指南 【免费下载链接】winutil Chris Titus Techs Windows Utility - Install Programs, Tweaks, Fixes, and Updates 项目地址: https://gitcode.com/GitHub_Trending/wi/winutil WinUtil是Windows系统优化与…...
)
如何轻松将 VCF 文件导入Android (已解决)
如果您曾经更换过Android手机或需要迁移联系人,您一定知道将联系人列表带过来有多么重要。VCF(vCard)文件是存储联系人信息的常用格式,将其导Android设备也相对简单。本文将介绍四种将VCF文件导Android的有效方法。第一部分&#…...
)
FastDDS安装与配置全指南:零基础入门到实战(含常见问题解决方案)
FastDDS安装与配置全指南:零基础入门到实战 第一次接触FastDDS时,我被它强大的实时通信能力和灵活的配置选项所吸引,但随之而来的是一连串的编译错误和配置困惑。记得当时为了调试一个简单的发布订阅示例,整整花了两天时间排查环…...

如何一键开启画中画模式:Chrome扩展终极指南
如何一键开启画中画模式:Chrome扩展终极指南 【免费下载链接】picture-in-picture-chrome-extension 项目地址: https://gitcode.com/gh_mirrors/pi/picture-in-picture-chrome-extension 你是否经常需要在看视频的同时处理其他工作?传统的全屏视…...

Sinkhorn算法实战:从理论到Python实现
1. Sinkhorn算法是什么?能解决什么问题? 第一次听说Sinkhorn算法时,我也是一头雾水。直到在图像配准项目中遇到最优传输问题,才发现这个算法的精妙之处。简单来说,Sinkhorn算法就像个"智能快递调度系统"——…...

图像质量评估翻车现场:我用Python复现了SSIM论文里的经典实验,结果有点意外
当Python遇上SSIM:一次颠覆认知的图像质量评估实验 那天深夜,我盯着屏幕上六张看似相同却又截然不同的图像,第一次对计算机视觉的基础评估指标产生了怀疑。作为常年与PSNR打交道的算法工程师,我从未想过这个被写进无数论文的"…...

深入TI C2000系列:TMS320C28x CPU架构设计背后的故事与编程哲学
深入TI C2000系列:TMS320C28x CPU架构设计背后的故事与编程哲学 在数字信号处理器的演进历程中,德州仪器(TI)的C2000系列始终占据着独特地位。作为专为实时控制而优化的DSP架构,TMS320C28x内核的设计哲学体现了工程师在…...