SemiDrive E3 MCAL 开发系列(3)– Wdg 模块的使用
一、 概述
本文将会介绍 SemiDrive E3 MCAL Wdg 模块的基本配置,并且会结合实际操作的介绍,帮助新手快速了解并掌握这个模块的使用,文中的 MCAL 是基于 PTG3.0 的版本,开发板是官方的 E3640 网关板。
二、 Wdg 模块的主要配置
Wdg 模块的配置主要有两大部分,一个是通用配置,另一个是针对每个 Wdg 实例的配置,我们先看通用配置,具体配置如图 2.1 所示。

图 2.1 Wdg 模块通用配置
关于以上配置选项的说明如下:
- WdgDevErrorDetect:勾选决定是否使能 Wdg 模块的 Dev 错误检测功能
- WdgDisableAllowed:勾选决定是否允许关闭看门狗功能
- WdgInitialTimeout:配置看门狗的初始超时时间,单位为秒,最大可以配置为 65.535 秒
- WdgMaxTimeout:配置看门狗的最大超时时间,单位为秒,最大可以配置为 65.535 秒,Det 检查时会用到。
- WdgRunArea,该功能目前不支持,不需配置。
接着针对每个 Wdg 实例进行配置,首先添加 Wdg 实际,操作如图 2.2 所示。
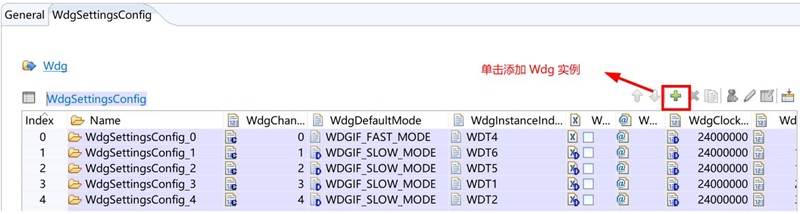
图 2.2 添加 Wdg 实例
接着如图 2.3 所示,进入 Wdg 具体实例的配置界面。

图 2.3 进入 Wdg 实例配置界面
如图 2.4 和图 2.5 所示为 Wdg 实例的配置界面,
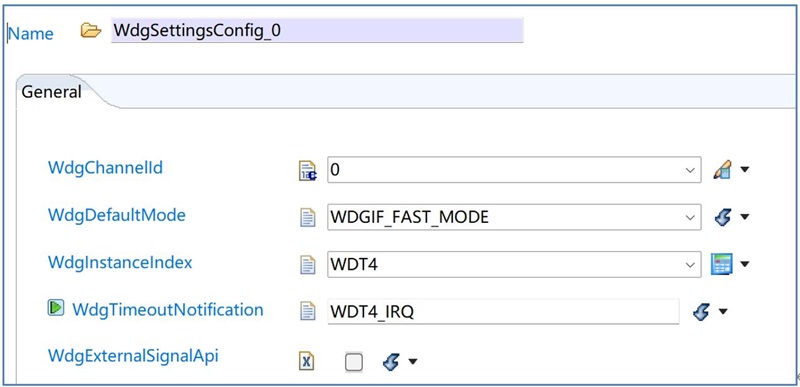
图 2.4 Wdg 模块实例配置一
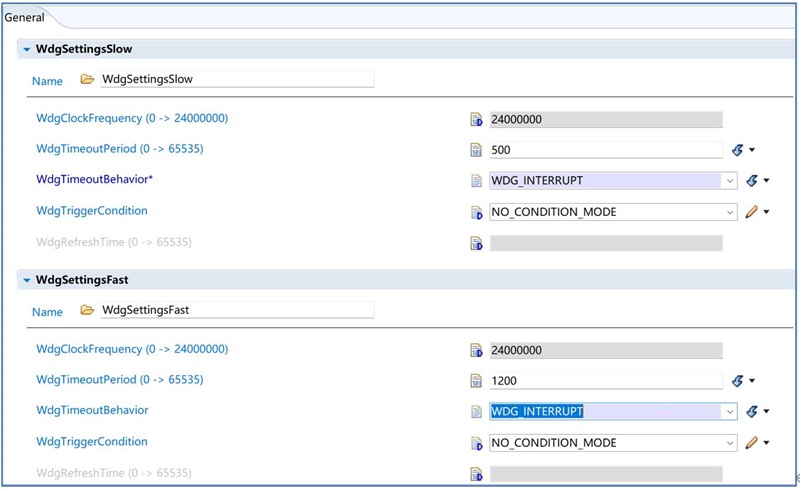
图 2.5 Wdg 模块实例配置二
具体每个配置项的作用如下:
- WdgChannelId:这个是自增的 ID,用户无需修改,改了会报错
- WdgDefaultMode:该 Wdg 模块调用初始化接口后的默认工作模式,总共有三种可以选择,WDGIF_FAST_MODE 和 WDGIF_SLOW_MODE 这两种模式本质上没有区别,对应两套配置,这两套配置的参数都是独立的,具体如图 2.5 所示。看门狗初始化后超时时间参数还是 WdgInitialTimeout 配置的时间,如果需要使用 Fast/Slow 模式下的时间参数,可以调用 Wdg_140_Instance(x)_Wdg_SetMode() 或者 Wdg_140_Instance(x)_SetTriggerCondition()。 除此之外还有 WDGIF_OFF_MODE,该模式会把超时值设置为 0,而 Wdg 是从 1 开始计数的,因此 0 永远不能达到,故不会发生超时。
- WdgInstanceIndex:选择使用哪个看门狗
- WdgTimeoutNotification:看门狗的中断回调函数
- WdgExternalSignalApi:可以配置一个 Gpio,超时后电平从高拉到低
- WdgClockFrequency:Wdg 的时钟,为 24MHz,不可修改
- WdgTimeoutPreiod:Fast/Slow 模式下的超时时间,单位为 ms。
- WdgTimeoutBehavior:Wdg 模块超时后的行为,可以选择复位、中断、或者两者都执行。
- WdgTiggerCondition:可以配置为 NO_CONDITION_MODE 或者 WINDOW_BASED_MODE,前者为普通模式,后者为窗口模式。
- WdgRefleshTime:用来配置窗口模式的时间,超过这个值才可以进行喂狗,单位为 ms,最大可以配置为 65535。
三、 实际操作
下面我们基于 MCAL 3.0 的例程来进行 Wdg 模块的验证,基于我们上面的 Wdg 模块配置,我们配置 Wdg4 的超时时间为 1200 ms,触发动作为中断,我们在例程中对 Wdg4 进行初始化并且设置为 Fast 模式,然后不进行喂狗,这样的话会每 1.2 s 进入一次中断函数,我们在中断回调函数中进行打印,具体测试代码如图 3.1 所示。

图 3.1 看门狗的测试代码
接着进行实际操作,将代码烧录到板子后启动运行,在串口终端中输入命令“runcase 1500”,此时会运行 sint32_Wdg4_irq_test1 这个函数,可以看到串口会每隔 1.2 s 打印一次 WDT4_IRQ,如图 3.2 所示。
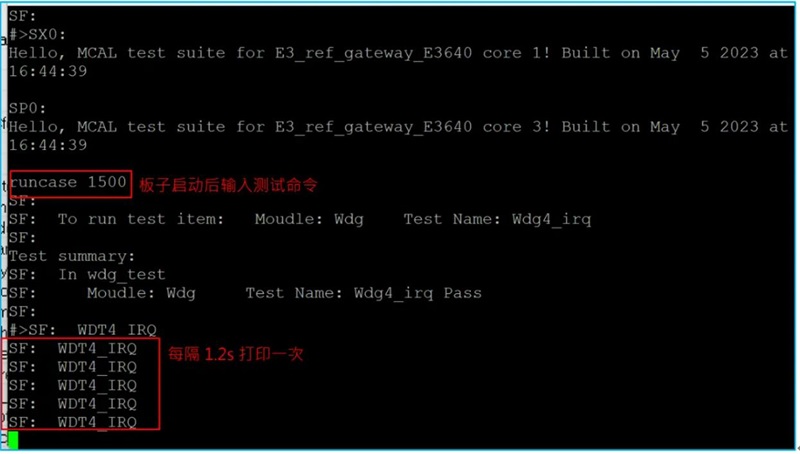
图 3.2 串口打印
四、 使用注意事项
E3 的 Wdg 模块在使用上有以下注意事项:
- E3 系列 MCU 最多支持 7 个 WatchDog,其中 WatchDog1~6 支持中断和重启,WatchDog8 只支持中断。
- 当触发重启操作时,除了 RTC 域以外其他域全部重新上电。
- 当 WdgTimeoutBehavior 模式选择为 Both 时,在系统重启前会先触发中断,中断和重启之间的间隔是固定的,大约 7 ms。
- 每个看门狗只允许在一个核中运行,禁止调用其他核的看门狗。
- 在窗口模式下,如果没有在窗口内喂狗会失败,并且没有提示信息。
- 如果某路看门狗未配置,禁止调用这路看门狗的任何接口
- Wdg 的时钟取决于 FS_24M 的配置,如果配置为 RC,看门狗时钟为 RC 24M,如果配置为 FS_24M,则看门狗时钟为外部晶振 24M。
五、 参考资料
1.《Semidrive_Wdg_User_Manual.pdf》,2022.05
2.《SemiDrive_E3_MCAL_User_Guide_Rev03.00.pdf》,2023.08
登录大大通,了解更多详情,解锁1500+完整应用方案,更有大联大700+FAE在线答疑解惑!
相关文章:
SemiDrive E3 MCAL 开发系列(3)– Wdg 模块的使用
一、 概述 本文将会介绍 SemiDrive E3 MCAL Wdg 模块的基本配置,并且会结合实际操作的介绍,帮助新手快速了解并掌握这个模块的使用,文中的 MCAL 是基于 PTG3.0 的版本,开发板是官方的 E3640 网关板。 二、 Wdg 模块的主要配置 …...

AI推荐算法的演进之路
推荐算法 基于大数据和AI技术,提供全流程一站式推荐平台,协助企业构建个性化推荐应用,提升企业应用的点击率留存率和永久体验。目前,主要的推荐方法包括:基于内容推荐、协同过滤推荐、基于关联规则推荐、基于效用推荐…...
Tomcat安装,配置文件、组件
一、Tomcat的基本功能 1.1.Tomcat是什么? Tomcat服务器是一个免费的开放源代码的Web应用服务器,属于轻量级应用服务器,在中小型系统和并发访问用户不是很多的场合下被普遍使用,是开发和调试JSP程序的首选。一般来说,T…...

精读《React Hooks 最佳实践》
简介 React 16.8 于 2019.2 正式发布,这是一个能提升代码质量和开发效率的特性,笔者就抛砖引玉先列出一些实践点,希望得到大家进一步讨论。 然而需要理解的是,没有一个完美的最佳实践规范,对一个高效团队来说&#x…...

varFormatter 数据格式化库 以性能优先的 快速的 内存对象格式转换
varFormatter 数据格式化 技术 开源技术栏 对象/变量格式化工具库,其支持将一个对象进行按照 JSON XML HTML 等格式进行转换,并获取到结果字符串! 目录 文章目录 varFormatter 数据格式化 技术目录介绍获取方式 使用实例格式化组件的基本使…...
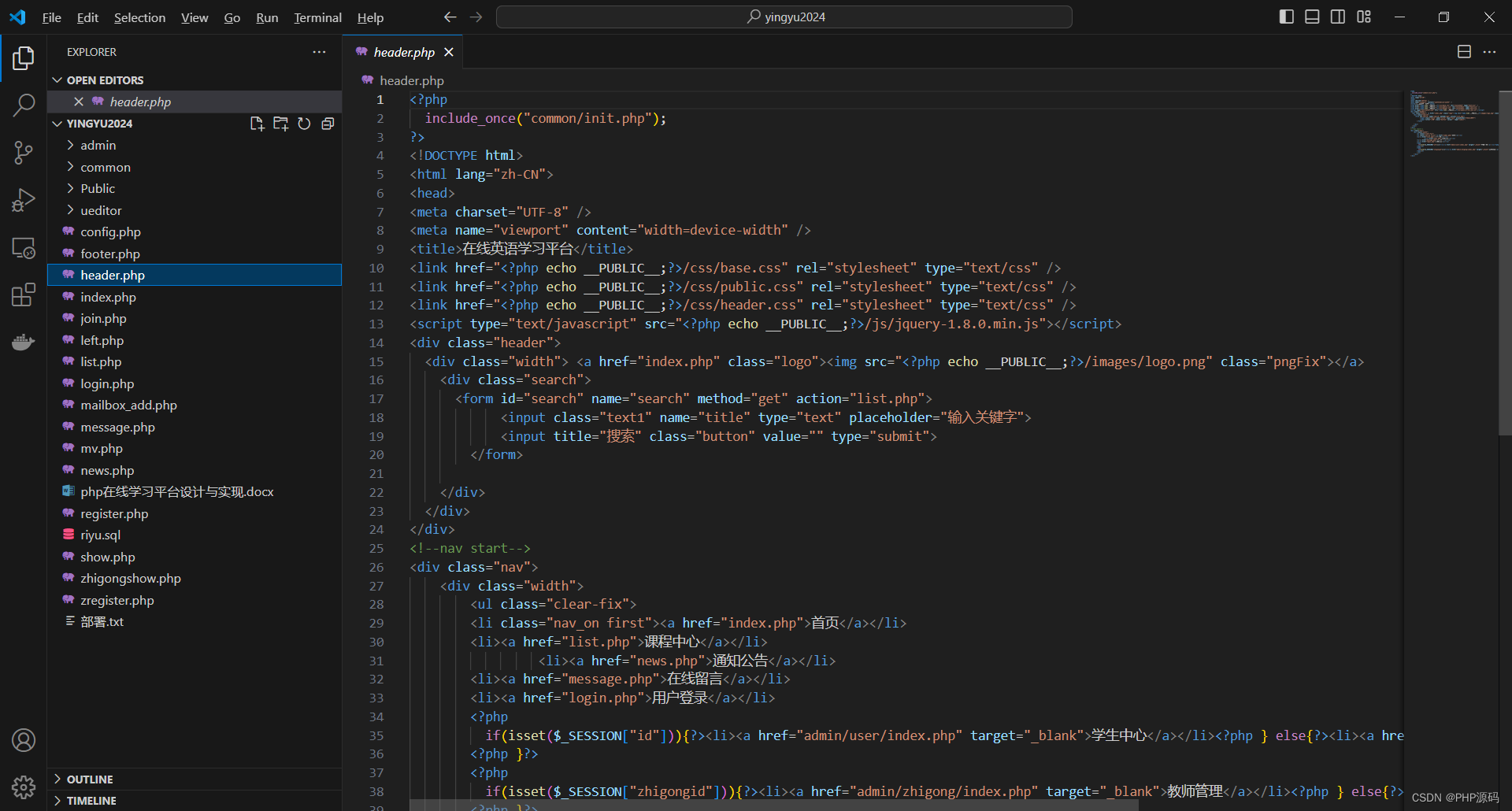
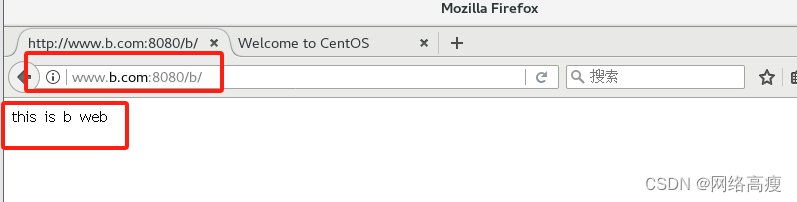
基于PHP的在线英语学习平台
有需要请加文章底部Q哦 可远程调试 基于PHP的在线英语学习平台 一 介绍 此在线英语学习平台基于原生PHP开发,数据库mysql。系统角色分为学生,教师和管理员。(附带参考设计文档) 技术栈:phpmysqlphpstudyvscode 二 功能 学生 1 注册/登录/…...
答辩常规问题和如何回答(答辩指导))
基于微信小程序电影院订票选座系统 (后台JSP+JDBC+Mysql)答辩常规问题和如何回答(答辩指导)
博主介绍:黄菊华老师《Vue.js入门与商城开发实战》《微信小程序商城开发》图书作者,CSDN博客专家,在线教育专家,CSDN钻石讲师;专注大学生毕业设计教育和辅导。 所有项目都配有从入门到精通的基础知识视频课程ÿ…...
:模拟算法真题 ★★★☆☆《安全警报》)
C++知识点总结(22):模拟算法真题 ★★★☆☆《安全警报》
安全警报 1. 审题 题目描述 Z市最大的金融公司:太平洋金融遭到了入侵,一名黑客潜入到了公司中,公司紧急启动安保程序,将大楼封锁,并安排作为安全主管的你对楼层进行搜查。所以你准备写一个程序,输入搜查楼…...

蓝桥杯练习系统(算法训练)ALGO-993 RP大冒险
资源限制 内存限制:64.0MB C/C时间限制:200ms Java时间限制:600ms Python时间限制:1.0s 问题描述 请尽情使用各种各样的函数来测试你的RP吧~~~ 输入格式 一个数N表示测点编号。 输出格式 一个0~9的数。 样例输入 0 样…...
Unity的相机跟随和第三人称视角
Unity相机跟随和第三人称视角 介绍镜头视角跟随人物方向进行旋转的镜头视角固定球和人的镜头视角 思路跟随人物方向进行旋转的镜头视角固定球和人的镜头视角 镜头旋转代码人物移动的参考代码注意 介绍 最近足球项目的镜头在做改动,观察了一下实况足球的视角&#x…...

哪个超声波清洗机品牌值得入手?销量榜品牌值得选购!
在科技日益发展的今天,超声波清洗技术以其高效、便捷和深度清洁的特点,已经深入到生活的诸多领域,从精密仪器到珠宝首饰,从眼镜框到假牙,甚至是厨房用品的日常护理,都能见到超声波清洗机的身影。面对市场上…...

Stwo:基于Circle STARK和M31的下一代STARK证明系统
1. 引言 StarkWare团队和Polygon Labs团队,历时数月,构造了基于Mersenne素数域M31的Circle STARK协议,通过使用M31 over a circle,可基于任意有限域构造高效STARKs,具体见2024年2月19日论文《Circle STARKs》。 基于…...
)
笔记本以太网集线器Hub充电可能导致网络异常(貌似是我把服务器网关写错了)
文章目录 笔记本以太网集线器(Hub)充电导致网络异常概述原理分析电源与信号干扰设备热度设备兼容性问题 解决方案升级固件提高设备散热效率选择兼容性好的设备 总结 今天用笔记本以太网直连服务器,一开始能连通,结果以太网hub插上…...

npm ERR! code ETIMEDOUT
在新建vue项目的时候报错 npm ERR! code ETIMEDOUT npm ERR! syscall connect npm ERR! errno ETIMEDOUT npm ERR! network request to https://registry.npmjs.org/vue%2fcli failed, reason: connect ETIMEDOUT 104.16.2.35:443 npm ERR! network This is a problem relate…...
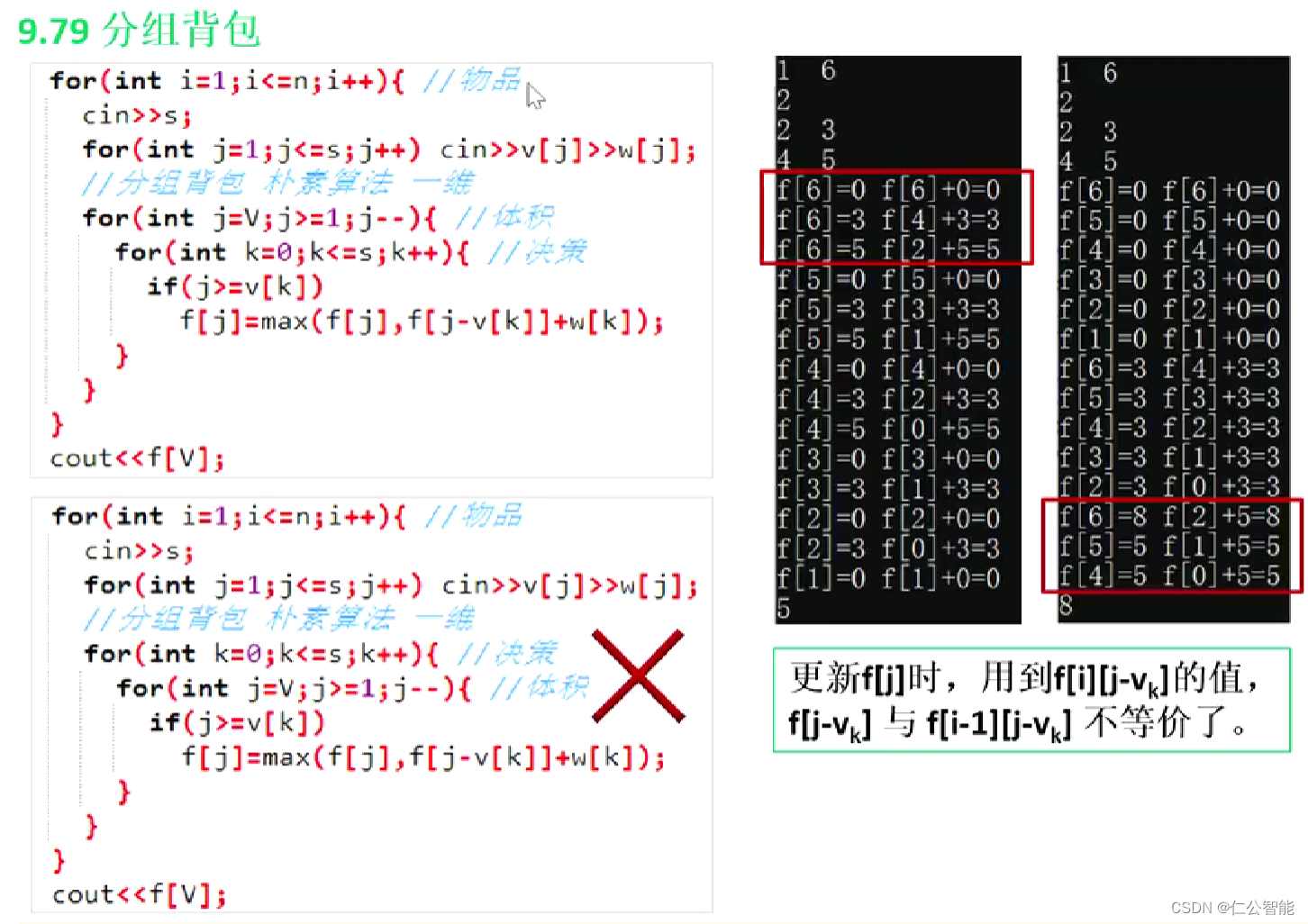
动态规划(算法竞赛、蓝桥杯)--分组背包DP
1、B站视频链接:E16 背包DP 分组背包_哔哩哔哩_bilibili #include <bits/stdc.h> using namespace std; const int N110; int v[N][N],w[N][N],s[N]; // v[i,j]:第i组第j个物品的体积 s[i]:第i组物品的个数 int f[N][N]; // f[i,j]:前i组物品,能放…...

太阳能供电井盖-物联网智能井盖监测系统-旭华智能
在这个日新月异的科技时代,城市的每一个角落都在悄然发生变化。而在这场城市升级的浪潮中,智能井盖以其前瞻性的科技应用和卓越的安全性能,正悄然崭露头角,变身马路上的智能“眼睛”,守护城市安全。 传统的井盖监测系统…...

贪心 Leetcode 455 分发饼干
分发饼干 Leetcode 455 学习记录自代码随想录 假设你是一位很棒的家长,想要给你的孩子们一些小饼干。但是,每个孩子最多只能给一块饼干。 对每个孩子 i,都有一个胃口值 g[i],这是能让孩子们满足胃口的饼干的最小尺寸࿱…...

策略开发:EMA如何计算
EMA的计算原理 EMA 是MA(平滑移动平均线)的另一种形式。全名“加权指数移动平均线”。 2/13就是12日移动平均线的平滑因子,他的意思是指:给予新价格 2/13的权重,给予过去的EMA 11/13的权重。 在计算的时候第一天的M…...

学习Android的第二十天
目录 Android Toast 吐司 常量 常用方法 例子 Android Notification 状态栏通知 Notification 的基本布局 扩展布局 Notification ( 状态栏通知 ) 相关的方法 例子: 参考文档 Android AlertDialog 弹出框 Android Dialog 继承图谱 AlertDialog 几种常…...
Linux技巧|centos7|重新认识和学习egrep和grep命令
前言: 相信提高文本检索工具,大家脑海里肯定有很多工具会自动跳出来,比如,grep,egrep,sed,cat,more,less,cut,awk,vim,vi…...

SiameseUIE在政务舆情监测中的应用:从长文本中秒级抽取主体、事件、地点、时间
SiameseUIE在政务舆情监测中的应用:从长文本中秒级抽取主体、事件、地点、时间 1. 引言:当海量舆情遇上精准信息抽取 想象一下,你是一位政务舆情分析师,每天要面对成千上万条来自新闻、论坛、社交媒体的信息。领导突然问&#x…...

终极指南:使用ncmdump免费解密网易云音乐NCM文件,轻松转换MP3格式
终极指南:使用ncmdump免费解密网易云音乐NCM文件,轻松转换MP3格式 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾经下载了网易云音乐的歌曲,却发现只能在特定播放器中播放?&a…...

魔兽争霸3终极优化指南:如何免费提升游戏性能与兼容性
魔兽争霸3终极优化指南:如何免费提升游戏性能与兼容性 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 你是否还在为魔兽争霸3的卡顿、画面…...

Z-Image i2L在教育领域的应用:智能课件生成系统
Z-Image i2L在教育领域的应用:智能课件生成系统 1. 引言 作为一名有着十多年教学经验的教育工作者,我深知制作精美课件有多么耗时费力。每次备课都要四处寻找合适的配图,调整图片风格,还要确保视觉元素与教学内容完美契合。这个…...

手机号码定位终极指南:5分钟学会如何快速查询号码归属地
手机号码定位终极指南:5分钟学会如何快速查询号码归属地 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_mi…...

DeepSeek-R1-Distill-Qwen-1.5B部署避坑指南:常见问题一网打尽
DeepSeek-R1-Distill-Qwen-1.5B部署避坑指南:常见问题一网打尽 1. 模型部署前的准备工作 1.1 硬件环境检查 在部署DeepSeek-R1-Distill-Qwen-1.5B模型前,请确保您的硬件满足以下最低要求: GPU:NVIDIA T4或更高性能显卡&#x…...

GLM-4.1V-9B-Base视觉能力深度评测:从图标识别到复杂图表理解
GLM-4.1V-9B-Base视觉能力深度评测:从图标识别到复杂图表理解 1. 开篇:当AI开始"看懂"图表 想象一下,你随手拍了一张公司季度报表的截图发给AI,它不仅能准确识别出里面的柱状图、折线图,还能告诉你哪个产品…...

STM32F407VET6+TB6612驱动4路直流电机:从硬件接线到PID调参全流程实战
STM32F407VET6TB6612驱动4路直流电机:从硬件接线到PID调参全流程实战 1. 硬件连接与电路设计 1.1 核心器件选型与特性 在开始硬件连接前,我们需要充分了解核心器件的特性:STM32F407VET6: Cortex-M4内核,带FPUÿ…...

Xmake进阶指南---打造高效Qt开发工作流
1. 为什么选择Xmake构建Qt项目? 第一次接触Qt开发的朋友,往往会被官方推荐的qmake或CMake构建工具劝退。我至今记得五年前接手一个遗留Qt项目时,面对.pro文件中晦涩的语法和复杂的平台条件判断,整整花了两天才让项目正常编译。直到…...

终极Kinto权限系统完全指南:如何精细控制数据访问与安全共享
终极Kinto权限系统完全指南:如何精细控制数据访问与安全共享 【免费下载链接】kinto A generic JSON document store with sharing and synchronisation capabilities. 项目地址: https://gitcode.com/gh_mirrors/ki/kinto Kinto是一个强大的JSON文档存储系统…...