计算机设计大赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录
- 1 前言
- 2 先上成果
- 3 车道线
- 4 问题抽象(建立模型)
- 5 帧掩码(Frame Mask)
- 6 车道检测的图像预处理
- 7 图像阈值化
- 8 霍夫线变换
- 9 实现车道检测
- 9.1 帧掩码创建
- 9.2 图像预处理
- 9.2.1 图像阈值化
- 9.2.2 霍夫线变换
- 最后
1 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 机器视觉 深度学习 车道线检测 - opencv
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 车道线
理解车道检测的概念
那么什么是车道检测?以下是百度百科对车道的定义:
车道,又称行车线、车行道,是用在供车辆行经的道路。在一般公路和高速公路都有设置,高速公路对车道使用带有法律上的规则,例如行车道和超车道。

对其进行定义是很重要的,因为它使我们能够继续进行车道检测概念。我们在建立一个系统时不能有任何含糊不清的地方。
正如我前面提到的,车道检测是自动驾驶汽车和自动驾驶汽车的关键组成部分。这是驾驶场景理解的重要研究课题之一。一旦获得车道位置,车辆就知道去哪里,并避免撞上其他车道或离开道路。这样可以防止驾驶员/车辆系统偏离车道。
以下是一些随机道路图像(第一行)及其检测到的车道(第二行):
4 问题抽象(建立模型)
我们希望执行的任务是实时检测视频中的车道。我们可以通过多种方式进行车道检测。我们可以使用基于学习的方法,例如在带注释的视频数据集上训练深度学习模型,或者使用预训练好的模型。
然而,也有更简单的方法来执行车道检测。在这里,学长将向你展示如何在不使用任何深入学习模型的情况下完成此任务。
下面是将要处理的视频的一个帧:
正如我们在这张图片中看到的,我们有四条车道被白色的车道标线隔开。所以,要检测车道,我们必须检测车道两边的白色标记。这就引出了一个关键问题——我们如何检测车道标线?
除了车道标线之外,场景中还有许多其他对象。道路上有车辆、路侧护栏、路灯等,在视频中,每一帧都会有场景变化。这很好地反映了真实的驾驶情况。
因此,在解决车道检测问题之前,我们必须找到一种方法来忽略驾驶场景中不需要的对象。
我们现在能做的一件事就是缩小感兴趣的领域。与其使用整个帧,不如只使用帧的一部分。在下面的图像中,除了车道的标记之外,其他所有内容都隐藏了。当车辆移动时,车道标线将或多或少地落在该区域内:

5 帧掩码(Frame Mask)
帧掩码只是一个NumPy数组。
当我们想对图像应用掩码时,只需将图像中所需区域的像素值更改为0、255或任何其他数字。
下面给出了一个图像掩蔽的例子。图像中某个区域的像素值已设置为0:

这是一种非常简单但有效的从图像中去除不需要的区域和对象的方法。
6 车道检测的图像预处理
我们将首先对输入视频中的所有帧应用掩码。
然后,我们将应用图像阈值化和霍夫线变换来检测车道标线。
7 图像阈值化
在这种方法中,灰度图像的像素值根据阈值被指定为表示黑白颜色的两个值之一。因此,如果一个像素的值大于一个阈值,它被赋予一个值,否则它被赋予另一个值。

如上所示,对蒙版图像应用阈值后,我们只得到输出图像中的车道标线。现在我们可以通过霍夫线变换很容易地检测出这些标记。
8 霍夫线变换
霍夫线变换是一种检测任何可以用数学方法表示的形状的方法。
例如,它可以检测矩形、圆、三角形或直线等形状。我们感兴趣的是检测可以表示为直线的车道标线。
在执行图像阈值化后对图像应用霍夫线变换将提供以下输出:

9 实现车道检测
是时候用Python实现这个车道检测项目了!我推荐使用Google Colab,因为构建车道检测系统需要计算能力。
首先导入所需的库:
import os
import re
import cv2
import numpy as np
from tqdm import tqdm_notebook
import matplotlib.pyplot as plt
# 获取帧的文件名
col_frames = os.listdir('frames/')
col_frames.sort(key=lambda f: int(re.sub('\D', '', f)))# 加载帧
col_images=[]
for i in tqdm_notebook(col_frames):img = cv2.imread('frames/'+i)col_images.append(img)
# 指定一个索引
idx = 457# plot frame
plt.figure(figsize=(10,10))
plt.imshow(col_images[idx][:,:,0], cmap= "gray")
plt.show()

9.1 帧掩码创建
我们感兴趣的区域是一个多边形。我们想掩盖除了这个区域以外的一切。因此,我们首先必须指定多边形的坐标,然后使用它来准备帧掩码:


9.2 图像预处理
我们必须对视频帧执行一些图像预处理操作来检测所需的车道。预处理操作包括:
-
图像阈值化
-
霍夫线变换
9.2.1 图像阈值化

9.2.2 霍夫线变换
lines = cv2.HoughLinesP(thresh, 1, np.pi/180, 30, maxLineGap=200)# 创建原始帧的副本
dmy = col_images[idx][:,:,0].copy()# 霍夫线
for line in lines:x1, y1, x2, y2 = line[0]cv2.line(dmy, (x1, y1), (x2, y2), (255, 0, 0), 3)# 画出帧
plt.figure(figsize=(10,10))
plt.imshow(dmy, cmap= "gray")
plt.show()

最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机设计大赛 深度学习机器视觉车道线识别与检测 -自动驾驶
文章目录 1 前言2 先上成果3 车道线4 问题抽象(建立模型)5 帧掩码(Frame Mask)6 车道检测的图像预处理7 图像阈值化8 霍夫线变换9 实现车道检测9.1 帧掩码创建9.2 图像预处理9.2.1 图像阈值化9.2.2 霍夫线变换 最后 1 前言 🔥 优质竞赛项目系列,今天要分…...
有中间件的各类链接和官网信息和漏洞库以及配置问题和开源工具)
中间件安全(概述)有中间件的各类链接和官网信息和漏洞库以及配置问题和开源工具
分类主要包括Apache、IIS、Tomcat、weblogic、websphere、Jboss等相关的技术知识和实践。 以Apache为例讲一讲如何保证中间件安全 中间件安全是指保护中间件软件和服务的安全性,防止被恶意攻击或者滥用。中间件软件是指在操作系统和应用程序之间提供通信和集成功能…...
Unity铰链四杆机构设计和运动仿真
一、效果图 设定好各边长度和转速后,点击【设置并启动】,自动生成一个机构模型,并按照原理进行运转 二、铰链四杆机构介绍 机架:A和D是固定位置,叫做机架。 曲柄:B点绕A点旋转,构成曲柄。 连…...

Python爬虫——解析常用三大方式之Xpath
目录 Xpath 安装xpath 安装lxml库 导入lxml库 解析本地文件 etree.parse() 解析服务器响应文件 etree.HTML() xpath基本语法 小案例:获取百度首页的百度一下 大案例:爬取站长素材图片 总结 Xpath 安装xpath 首先要学会安…...

C#判断DataTable1 A列的集合是否为DataTable2 B列的集合的子集
DataSet ds2 (DataSet)res2.Anything; // 检查 集合B是否为集合A的子集 var table1MaterialCodes ds.Tables[2].AsEnumerable().Select(row > row["Code"]).ToList(); //DataSet1 表Code列集合A var table2MaterialCodes ds2.Tables[0].AsEnumerable().Selec…...
VirtualBox 桥接网卡 未指定 “未能启动虚拟电脑Ubuntu,由于下述物理网卡未找到:”
解决办法,安装虚拟网卡,win11查找方式:控制面板→网络和共享中心→更改适配器设置 此时出现下面情况就算安装成功 但是如果报错:找不到指定的模块 则按下面步骤删除干净垃圾重新上面操作 先安装CCleaner, 链接:CCleaner Makes Y…...
基于yolov5的电瓶车和自行车检测系统,可进行图像目标检测,也可进行视屏和摄像检测(pytorch框架)【python源码+UI界面+功能源码详解】
功能演示: 基于yolov5的电瓶车和自行车检测系统_哔哩哔哩_bilibili (一)简介 基于yolov5的电瓶车和自行车检测系统是在pytorch框架下实现的,这是一个完整的项目,包括代码,数据集,训练好的模型…...
vscode如何远程到linux python venv虚拟环境开发?(python虚拟环境、vscode远程开发、vscode远程连接)
文章目录 1. 安装VSCode2. 安装扩展插件3. 配置SSH连接4. 输入用户名和密码5. 打开远程文件夹6. 创建/选择Python虚拟环境7. 安装Python插件 Visual Studio Code (VSCode) 提供了一种称为 Remote Development 的功能,允许用户在远程系统、容器或甚至 Windows 子系统…...
蓝桥杯第十二届电子类单片机组程序设计
目录 前言 蓝桥杯大赛历届真题_蓝桥杯 - 蓝桥云课(点击查看) 单片机资源数据包_2023(点击下载) 一、第十二届比赛原题 1.比赛题目 2.题目解读 蓝桥杯第十四届电子类单片机组程序设计_蓝桥杯单片机哪一届最难-CSDN博客 二、…...

基于springboot+vue的工作流程管理系统
博主主页:猫头鹰源码 博主简介:Java领域优质创作者、CSDN博客专家、阿里云专家博主、公司架构师、全网粉丝5万、专注Java技术领域和毕业设计项目实战,欢迎高校老师\讲师\同行交流合作 主要内容:毕业设计(Javaweb项目|小程序|Pyt…...

【LeetCode刷题】146. LRU 缓存
请你设计并实现一个满足 LRU (最近最少使用) 缓存 约束的数据结构。 实现 LRUCache 类: LRUCache(int capacity) 以 正整数 作为容量 capacity 初始化 LRU 缓存int get(int key) 如果关键字 key 存在于缓存中,则返回关键字的值,否则返回 -…...

奇酷网络用AI思维办公:不允许做PPT,只能用Word,只能一页纸
在AI时代,视频制作领域正经历着一场革命。Sora 作为首个文生视频大模型,可能攻克了自然语言处理、计算机视觉和深度学习等难点,使视频生成更真实、自然。奇酷网络是一家很另类、很奇怪的“AI游戏”创业公司,奇酷网络董事长吴渔夫(…...

【笔记】-编程语言以及应用领域
C/C 永远不会衰败的语言,适合偏底层,例如:Windows操作系统80%以上都是由C/C完成的,C/C也集成用于写应用层C/S架构的软件 JAVA 是真正的跨平台的语言 “一次编程,到处使用”Java适合应用层的开发,无论是…...

MWC 2024丨美格智能推出5G RedCap系列FWA解决方案,开启5G轻量化新天地
2月27日,在MWC 2024世界移动通信大会上,美格智能正式推出5G RedCap系列FWA解决方案。此系列解决方案具有低功耗、低成本等优势,可以显著降低5G应用复杂度,快速实现5G网络接入,提升FWA部署的经济效益。 RedCap技术带来了…...
mTLS: openssl创建CA证书
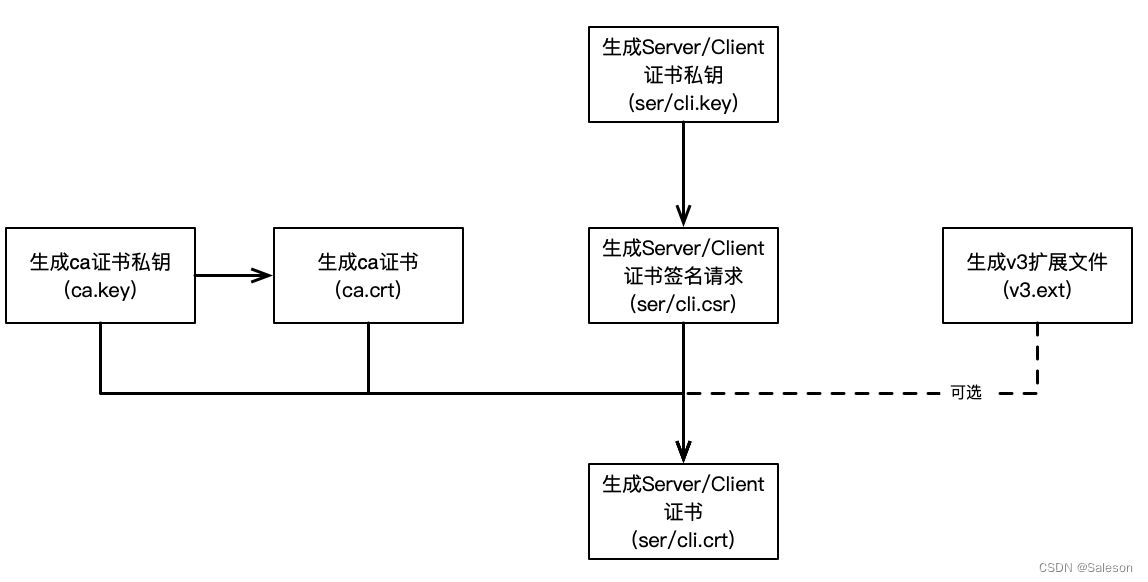
证书可以通过openssl或者keytool创建,在本篇文章中,只介绍openssl。 openssl 生成证书 申请操作流程 生成ca证书私钥, 文件名:ca.key生成ca证书,文件名:ca.crt生成Server/Client 证书私钥,文件名&#x…...

Python 进阶语法:os
3.1.1 文件和目录操作 os.getcwd(): 获取当前工作目录的路径。 import os# 获取当前工作目录 current_directory os.getcwd() print("当前工作目录是:", current_directory) os.chdir(path): 改变当前工作目录到指定的路径。 import os# 改变当前工作目录 os.c…...
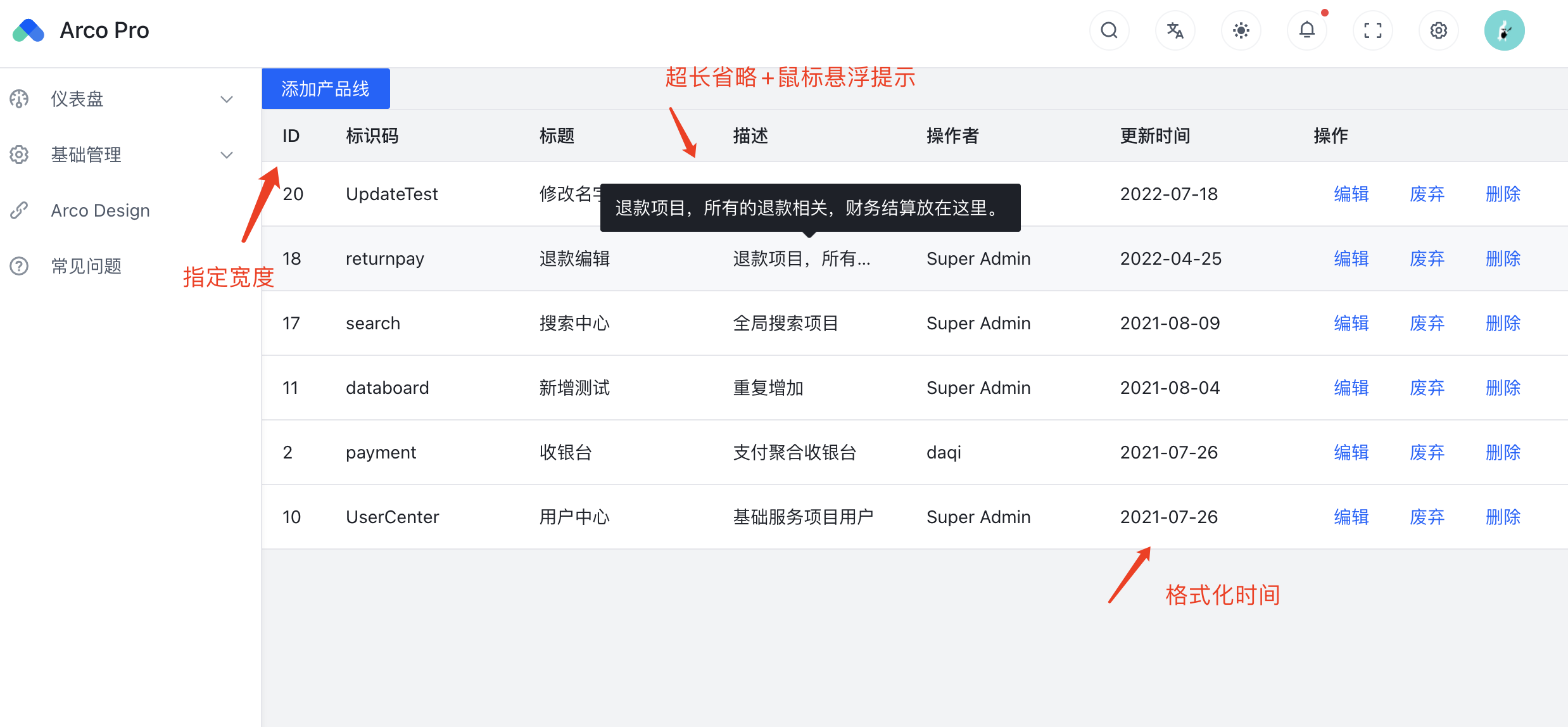
测试需求平台9-Table 组件应用产品列表优化
✍此系列为整理分享已完结入门搭建《TPM提测平台》系列的迭代版,拥抱Vue3.0将前端框架替换成字节最新开源的arco.design,其中约60%重构和20%新增内容,定位为从 0-1手把手实现简单的测试平台开发教程,内容将囊括基础、扩展和实战&a…...

targetSdkVersion > 30 如何将下载的网络视频 保存到手机相册里更新
在 targetSdkVersion 31 中,将下载的网络视频保存到手机相册中涉及几个关键步骤。由于 Android 12(API 级别 31)引入了更多的隐私和安全限制,特别是作用域存储(Scoped Storage),因此你需要遵循这…...
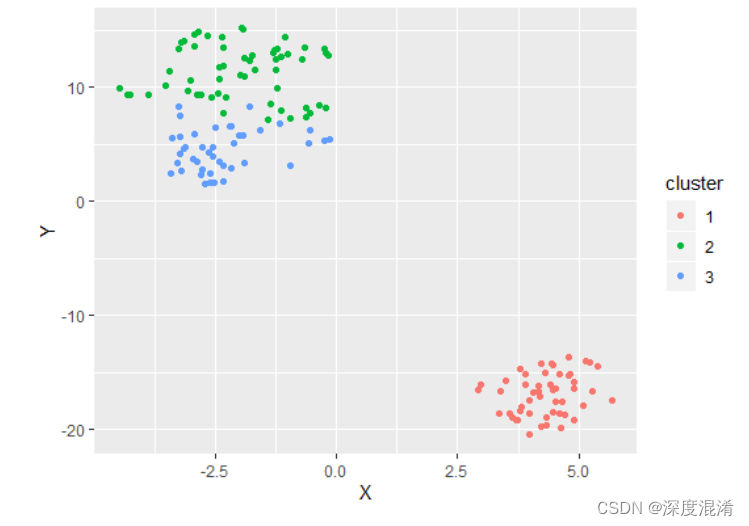
C#,无监督的K-Medoid聚类算法(K-Medoid Algorithm)与源代码
1 K-Medoid算法 K-Medoid(也称为围绕Medoid的划分)算法是由Kaufman和Rousseeuw于1987年提出的。中间点可以定义为簇中的点,其与簇中所有其他点的相似度最小。 K-medoids聚类是一种无监督的聚类算法,它对未标记数据中的对象进行聚…...

宏定义中#与##的注意事项
1. #是字符串化操作符。它的作用是将宏参数转换成字符串 2. ##是标记粘贴操作符。它的作用是将两个标记连接起来形成一个新的标记 #define TEST1(a) #a #define TEST2(a) b##a/***********************************************************/ 举例:TEST1(hello) 会…...

【K8s】【笔记】----第七章:Kubernetes Service详解
【K8s】【笔记】----第一章:Kubernetes 介绍 【K8s】【笔记】----第二章:Kubernetes 集群环境搭建 【K8s】【笔记】----第三章:Kubernetes 资源管理 【K8s】【笔记】----第四章:Kubernetes 实战入门 【K8s】【笔记】----第五章&am…...

nnUNet环境配置避坑指南:从PyTorch安装到数据集转换的完整流程
nnUNet环境配置与实战指南:从零搭建医学图像分割流水线 1. 环境部署:构建稳定高效的PyTorch基础 在开始nnUNet之旅前,确保拥有兼容的硬件环境:推荐使用NVIDIA显卡(RTX 3060及以上)、16GB以上内存和至少100G…...

基于ModelEngine Nexent与RAG技术:构建智能AI心理医生全流程指南
本文将手把手带你使用ModelEngine Nexent框架,基于RAG技术构建一个能提供专业心理支持的AI助手。我们将从环境配置开始,逐步实现知识库构建、智能体编排到最终部署的全流程。 文章目录一、认识ModelEngine二、环境配置三、模型配置3.1 准备API-Key3.2 配…...

DDD难落地?就让AI干吧! - cleanddd-skills介绍绽
AI训练存储选型的演进路线 第一阶段:单机直连时代 早期的深度学习数据集较小,模型训练通常在单台服务器或单张GPU卡上完成。此时直接将数据存储在训练机器的本地NVMe SSD/HDD上。 其优势在于IO延迟最低,吞吐量极高,也就是“数据…...
)
WSL2 Ubuntu迁移,导出Ubuntu,导入Ubuntu(存储位置)
一、Ubuntu虚拟硬盘文件路径 网上说的 C:\Users\admin\AppData\Local\Packages\CanonicalGroupLimited.Ubuntu22.04LTS_79rhkp1fndgsc\LocalState\ext4.vhdx 我没有CanonicalGroupLimited.Ubuntu22.04LTS_79rhkp1fndgsc这个目录 搜索ext4.vhdx C:\Users\admin\AppData\Local\…...

【技术前沿】大模型驱动的无损数据压缩:突破传统极限的新范式
1. 大模型如何重新定义数据压缩的极限 十年前我第一次接触数据压缩技术时,被那些复杂的数学公式和编码规则搞得晕头转向。当时使用的还是基于香农信息论的传统方法,虽然效果不错,但总觉得遇到了某种看不见的天花板。直到最近看到LMCompress这…...

Vivado2020.2与Modelsim2020.4联合仿真实战:从安装到避坑指南
1. 环境准备与安装避坑指南 刚接触FPGA开发的朋友们,肯定对Vivado和Modelsim这对黄金搭档不陌生。但说实话,我第一次用Vivado2020.2和Modelsim2020.4做联合仿真时,差点被各种坑给劝退。今天我就把踩过的坑和解决方案都整理出来,让…...

【JavaScript高级编程】拆解函数流水线 上戏
一、什么是setuptools? setuptools 是一个用于创建、分发和安装 Python 包的核心库。 它可以帮助你: 定义 Python 包的元数据(如名称、版本、作者等)。 声明包的依赖项,确保你的包能够正确运行。 构建源代码分发包&…...

如何在Windows上快速安装安卓应用:APK Installer完整指南
如何在Windows上快速安装安卓应用:APK Installer完整指南 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为Windows电脑无法直接安装安卓APK文件而烦恼…...

Bilibili API评论接口实战指南:高效获取与处理用户互动数据
Bilibili API评论接口实战指南:高效获取与处理用户互动数据 【免费下载链接】bilibili-api 哔哩哔哩常用API调用。支持视频、番剧、用户、频道、音频等功能。原仓库地址:https://github.com/MoyuScript/bilibili-api 项目地址: https://gitcode.com/gh…...